电控空气悬架车身高度调节的模糊PID控制
基于GA优化控制规则的汽车主动悬架模糊PID控制
汽车主动悬架系统一方面存在非线性、时变性等
不确定因素,另一方面模糊控制不依赖于控制对象模 型,它不用数值变量而用语言变量描述系统特征,并依
据系统动态信息和模糊规则进行推理以获得合适的控 制量,但控制精度不太理想。基于此,将模糊控制的良 好动态跟踪能力与PID的良好稳定性相结合控制汽车
式中:鸩为簧载质量;M,为非簧载质量;Ks为悬架弹簧
度谱及相应时域形式描述。常用路面模型为Thompson 提出的由白噪声经积分所得随机路面模型。 路面轮廓时间频率谱密度函数为:
睁’=砀1+睁1
Ki’=Kil+尉I
(17)
Kd’=Kdl+尉J
其中:如1,Kil,Kdl为模糊修正前的PID参数,印’,
Gq(D=寺G。(‰)(景)=Gq(n。)‰2芳
时间频率速度功率谱函数为:
刚度;K为轮胎刚度;C。为阻尼器阻尼系数;Zo为路面 不平度;互为簧载质量位移;z:为非簧载质量位移,M为 作动器产生的控制力。
1.2随机路面输入模型
分析悬架在时域或频域内的性能,首先用到路面
输入,对连续型随机路面,通常用影响速度的白噪声速
设计一个两输入三输出模糊控制器,将误差E及 变化率EC作为输入,有:
振动与冲击 第3l卷第22期
JoURNAL OF VIBRATION AND SHOCK
基于GA优化控制规则的汽车主动悬架模糊PID控制
王威1,薛彦冰2,宋玉玲1,杜晓晨1
(1.西北农林科技大学机械与电子工程学院,陕西杨凌712100;2.山东大学机械工程学院,济南250061)
捅
要:主动悬架是未来汽车悬架的主要发展方向,它能根据车身的振动情况主动调整悬架控制力,使悬架处于
an
were
基于GA优化控制规则的汽车主动悬架模糊PID控制

基于GA优化控制规则的汽车主动悬架模糊PID控制
王威;薛彦冰;宋玉玲;杜晓晨
【期刊名称】《振动与冲击》
【年(卷),期】2012(031)022
【摘要】主动悬架是未来汽车悬架的主要发展方向,它能根据车身的振动情况主动调整悬架控制力,使悬架处于最优减振状态,关键问题是如何设计控制规则,从而施加最优控制力,达到进一步改善汽车行驶平顺性目的.对此,以车身垂直振动加速度为控制目标,将遗传算法与模糊PID控制策略融合,优化模糊PID控制器控制规则,采用基于GA优化后的模糊PID控制方法对汽车主动悬架进行控制并建立Matlab文本与Simulink相结合的联合仿真模型.仿真结果表明,经GA优化后的模糊PID控制下的主动悬架能很好的减小车身垂直振动加速度,可进一步提高乘坐舒适性.
【总页数】6页(P157-162)
【作者】王威;薛彦冰;宋玉玲;杜晓晨
【作者单位】西北农林科技大学机械与电子工程学院,陕西杨凌712100;山东大学机械工程学院,济南250061;西北农林科技大学机械与电子工程学院,陕西杨凌712100;西北农林科技大学机械与电子工程学院,陕西杨凌712100
【正文语种】中文
【中图分类】O322
【相关文献】
1.基于模糊PID控制的汽车主动悬架研究 [J], 王靖岳;王浩天;张勇
2.基于模拟退火遗传算法的模糊PID控制规则优化 [J], 王乐;王福龙
3.基于模糊PID控制的汽车半主动悬架系统的研究 [J], 王瑞;郭全民
4.基于微分几何的汽车主动悬架模糊PID控制研究 [J], 许伟
5.基于粒子群算法的车辆半主动悬架模糊PID控制的优化研究 [J], 樊智敏;王宝林;樊宇
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车电控空气悬架高度调节控制研究

汽车电控空气悬架高度调节控制研究摘要:本文根据电控空气悬架系统,建立了空气弹簧模型。
基于神经网络PID控制方法设计了车身高度调节控制器,选择采用增量式PID控制方法进行控制。
对控制器的控制效果进行仿真分析,结果表明:增量式PID控制方法可以有效的改善车身高度调节中的不良现象、消除超调现象,并能够较早地、平稳地达到目标高度。
关键词:空气弹簧模型、增量式PID控制、仿真引言悬架是车辆行驶性能中最重要的相关系统,它主要包括弹性元件,减振器和导向机构。
弹性元件起缓冲作用,导向机构起导向作用,减振器起减振作用[1][2]。
电子控制空气悬架作为一种新型主动悬架,可以实时对空气弹黃刚度和减振器阻尼力进行调节,同时可以对车身高度进行调节[3]。
目前国外对全主动悬架(ECAS)的电子控制系统研究较多,如福特汽车公司的Continental Mark Ⅶ车型和丰田汽车公司的Lexus车型都成功地采用了电子控制空气悬架系统[4]。
国内汽车企业设计人员普遍对ECAS设计理论不够深入,尤其是在空气悬架与整车匹配、悬架控制理论技术和空气弹黃设计等方面。
空气悬架主动控制的研究,对提高车辆的乘坐舒适性、行驶平顺性、操纵稳定性等性能,具有重要的理论和学术价值。
1 车身高度调节控制空气弹簧是在橡胶气囊密封容器中充入压缩气体,利用气体的可压缩性实现其弹性作用的装置。
空气弹簧充放气过程:空气泵向储气罐提供一定的压缩气体作为气源,当空气弹簧需要充气时,进气阀打开,储气罐中的气体经进气阀流入空气弹簧;当空气弹簧需要放气时,排气阀打开,空气弹簧中的气体经排气阀排流入大气中。
对空气弹簧进行充放气时,空气弹簧高度也随之变化,可将高度变化过程分为:电磁阀开启时的变容积绝热充放气过程和电磁阀关闭后定质量密闭系统的稳定过程。
根据热力学第一定律得到电磁阀开启时空气弹簧内气体压力与气体流量之间的关系表达式如下:从式(8)看出:减小空气弹簧有效作用面积变化率或增大空气弹簧体积,可以达到降低固有频率的目的。
车辆主动悬架的模糊PID控制仿真
车辆主动悬架的模糊PID控制仿真景园;赵强;张娜【摘要】根据某车型悬架参数,建立了1/4车主动悬架Matlab/Simulink模型,选择簧载质量加速度、悬架动挠度、轮胎动载荷作为控制目标量,采用模糊PID复合控制技术,针对该悬架模糊控制模型的设计及仿真.仿真结果表明:与被动控制、PID 控制的悬架系统性能相比,该控制策略系统的簧载质量加速度和轮胎动载荷有了显著降低,有效改善了乘坐舒适性.【期刊名称】《机电产品开发与创新》【年(卷),期】2015(028)006【总页数】3页(P91-92,84)【关键词】主动悬架;模糊PID控制;仿真【作者】景园;赵强;张娜【作者单位】东北林业大学交通学院,黑龙江哈尔滨150040;东北林业大学交通学院,黑龙江哈尔滨150040;东北林业大学交通学院,黑龙江哈尔滨150040【正文语种】中文【中图分类】TP3不同于固定阻尼和刚度系数的车辆被动悬架,阻尼可调的主动悬架不仅能够适应车辆载荷、行驶速度以及路面的不平程度变化达到有效减震的目的,还可以调节刚度控制悬架侧倾。
从结构而言,主动悬架实际是一个主动力的发生器。
因此,控制策略的优劣对主动悬架控制效果有极大影响。
其中利用现代控制算法中应用比较广泛的研究有:陈志林利用了渐近稳定自适应控制[1];Yoon Y S等利用最优控制算法得到二次型性能指标[2];孙涛在电流变液磁流变半主动悬架上试验了模糊PID控制[3]等等。
其中PID控制具有原理简单、使用方便等优点应用最广泛,而车辆主动悬架控制系统为多自由度、多参数的非线性系统,常根据经验法不断调试确定PID的参数。
本文选用模糊PID控制,将模糊推理运用于PID参数的整定,以根据经验制定控制规则得出控制决策表,然后求出控制量的大小,不再需对控制对象精确建模,并通过Matlab/Simulink进行了建模及仿真分析。
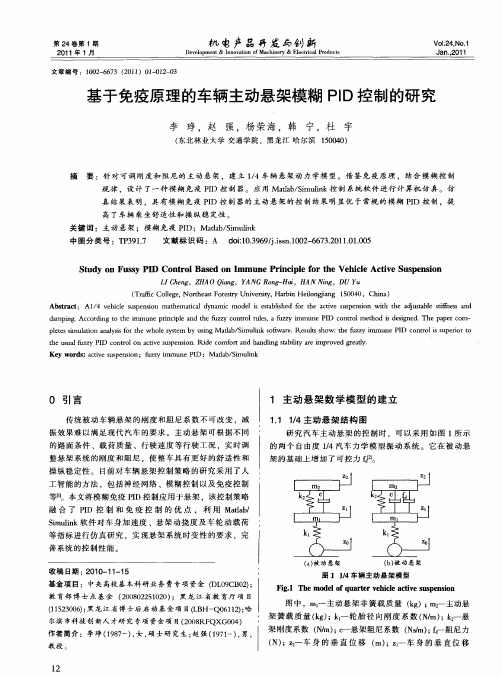
1/4 车辆主动悬架理想模型如图1所示。
其模型根据牛顿定律满足以下动力方程:式中:m1—主动悬架非簧载质量(kg);m2—主动悬架簧载质量(kg);k1—轮胎径向刚度系数(N/m);k2—悬架刚度系数(N/m);c—减振器的阻尼系数(Ns/m);z2—车身簧载质量的垂直位移(m);z1—车身非簧载质量的垂直位移(m);z0—路面激励(m);fd—作动器的输出力(N)。
汽车主动悬架自适应模糊PID控制研究
3 4 Ma c h i n e r y De s i g n & Ma n u f a c t u r e
第 2期 2 0 1 4年 2月
汽车主动 悬架 自适应模糊 P I D控制研 究
伍 良生, 洪 豪, 马建峰 , 卢成龙
( 北京工业大学 机械工程及应用电子技术学院 , 北京 1 0 0 1 2 4 )
a d o p t e d s i n c f u n c t i o n t o c o m p e n s a t e f o r t h e l e a k a g e o f t h e F 兀、 i n t h e n o n — i n t e g r l a p e r i o d t r u n c ti a o n e r r o r .t o g u a r nt a e e t h e cc a u r cy a o f t h e f r e q u e n c y - d o m in a s  ̄ na g l o b t in a e d . T h e d e t e c t i o n s y s t e m h s a a g o o d e r p e t a a b i l i t y , a n d h i g h p r e c s i i o  ̄
C h i n a )
Ab s t r a c t : T / r e b a l a n c i n g p e  ̄ rm ̄ a ce n i s a n i m p o r t a n t i n d i c a t o r t o me a s u r e t h e q u a l i t y o f t h e t i r e ,a n d t h e t i r e u n b l a a n c e
基于免疫原理的车辆主动悬架模糊PID控制的研究
关 键 词 :主 动 悬 架 ;模 糊 免 疫 PD ;M aa /i lk I d b Smui n
中 图 分 类 号 :T 3 1 P 9. 7
文 献 标 识 码 :A d i 03 6 /.s . 0 — 6 32 1.1 0 o: .9 9 jsn1 2 6 7 . 1 . 5 1 i 0 0 O 0
d mpng a i .Ac ori o t e i m u e p n il n ef z o to u e,af zy i c dng t h m n r cpea d t uzy c n r lrls z mm u e P D o r lm eh d i eine Th a rc m- i h u n I c nto t o sd s g d. e p pe o
架 的 基 础 上 增 加 了可 控 力 。
振 效果难 以满 足现代 汽 车的要求 。主动悬 架可 根据不 同 的路面 条件 、载荷 质量 、行驶 速度 等行驶 工况 ,实 时调
整 悬 架 系 统 的 刚度 和 阻 尼 。使 整 车 具 有 更 好 的 舒 适 性 和
操 纵稳定性 。 目前 对车 辆悬 架控 制策 略的研 究采 用 了人
St y o Fu s D nt o s d o m m i n ud n s y PI Co r lBa e n I e Prncpl or t h c e Ac i e Su pe so
L h n ,Z A i g A GR n- a,H NM 凡 , I eg H 0 Q a ,Y N C n og H i A g DUY u
工 智能 的方 法 .包 括神 经 网络 、模 糊控 制 以及免 疫控制
基于模糊控制电控空气悬架车身高度控制策略研究
基于模糊控制电控空气悬架车身高度控制策略研究关欣【摘要】针对车身高度调节过程中,电控空气悬架充排气而产生的非线性特性,建立了电控空气悬架的管路流量模型、空气压力模型及空气悬架动力学模型.为了消除调节过程中产生的高度误差,设计了适用于非线性控制的模糊控制器,并与电控空气悬架系统模型联合建模仿真.结果表明,模糊控制能够快速稳定的对车身高度进行调节.【期刊名称】《装备制造技术》【年(卷),期】2017(000)011【总页数】3页(P160-162)【关键词】电控空气悬架;车身高度控制;模糊控制【作者】关欣【作者单位】沈阳理工大学汽车与交通学院,辽宁沈阳110159【正文语种】中文【中图分类】U463.32随着汽车技术的快速发展,电控空气悬架越来越多地应用于汽车当中。
为了提高汽车行驶的综合性能,需要设计模糊控制器控制汽车行驶时的车身高度,使汽车高速行驶时,电控空气悬架控制车身高度降低,以减小风的阻力,提高汽车的经济性与稳定性。
当汽车在颠簸的路面上行驶时,控制车身高度升高,提高车辆的通过性.1 电控空气悬架数学模型电控空气悬架主要由空气压缩机、储气罐、充气阀、空气弹簧、排气阀、减震器组成。
空气悬架充气时,ECU控制充气阀打开排气阀关闭,储气罐中的空气充入到空气弹簧中;空气悬架排气时,ECU控制排气阀打开,充气阀关闭,空气弹簧中的空气排入到大气当中。
1.1 管路流量数学模型空气在空气悬架中流经充排气阀产生的空气质量流量对空气弹簧的非线性特性有着重要的影响[1],空气质量流量公式如下:式中:R为气体常数,cq为气路流阻系数,Av为电磁阀等效截面积,T为气体热力学温度。
当充气时,Pu为储气罐压力,Pd为气囊内绝对压力。
当排气时,Pu为气囊绝对压力,Pd为大气压力,Pcr是临界压力比,对理想的气体,取Pcr为0.528 2.1.2 空气压力数学模型根据文献[2]充气过程中,空气弹簧的压力模型为式中:V(y)=V0+ βy,V0为空气弹簧的初始体积,β为空气弹簧体积变化率,y为空气弹簧位移,v为空气弹簧位移变化率。
空气悬架电控系统的参数自整定模糊控制
空气悬架电控系统的参数自整定模糊控制于微波;杜遵生;杨听听【摘要】With a car model as the object ,a parameter self-adjusting fuzzy control strategy is put forward according to the spring characteristics of the air . We design an air suspension electrical control system and the simulation results show that the controller can effectively decrease the vertical acceleration and improve the overall performance .%以微型客车四分之一车辆模型为被控对象,分析了空气弹簧的特性,提出了参数自调整模糊控制策略。
设计了一套功能优良的汽车空气悬架电控装置并进行了模拟实验,实验结果表明,该方法能够有效地降低车身垂直加速度,改善车辆的综合性能,提高了小型客车行驶时车辆的平顺性。
【期刊名称】《长春工业大学学报(自然科学版)》【年(卷),期】2014(000)001【总页数】6页(P90-95)【关键词】空气悬架;参数自调整模糊控制;电子控制单元;加速度传感器【作者】于微波;杜遵生;杨听听【作者单位】长春工业大学电气与电子工程学院,吉林长春 130012;长春工业大学电气与电子工程学院,吉林长春 130012;长春工业大学电气与电子工程学院,吉林长春 130012【正文语种】中文【中图分类】U463车辆行驶的平顺性、操作稳定性在很大程度上受悬架的影响,而人们对车辆乘坐舒适性及安全性的要求越来越高。
传统的被动悬架由于不能自动调节其参数,使其适应载荷、车速或路况等不可测因素的变化难以满足人们要求。
基于模糊自适应 PID 控制器的空气悬架控制策略研究
基于模糊自适应 PID 控制器的空气悬架控制策略研究詹长书;程崇;孙世磊【摘要】空气悬架可以根据车辆振动情况改变悬架控制力,从而提高车辆的乘坐舒适性和道路友好性。
为了提高车辆的行驶平顺性,利用Matlab/Simulink建立了1/4空气悬架模型和控制器,控制器通过模糊控制对PID控制器参数进行自整定,对PID的控制量加以实时修正。
仿真结果表明,采用模糊自适应P ID控制器空气悬架的车辆相对于P ID控制悬架和被动悬架车身加速度有明显减小,轮胎动载荷有所减小,但悬架动行程略有提高。
综合来看,模糊自适应 PID控制器具有较好的控制效果,改善了汽车行驶平顺性。
%In order to improve the vehicle ride comfort capability ,using Matlab /Simulink a 1/4 air suspension model and controller are established to establish .The controller through fuzzy control for PID controller parameters self‐tuning ,the amount of PID controller parameter will correct in real time .The simulation resultsshow :the fuzzy adaptive PID controller for the air suspension relative to PID control suspension and passive suspension has significantly reduce of the vehicle body accelera‐tion ,the dynamic load of tire is reduced ,but the suspension dynamic deflection increased slightly .On the w hole ,fuzzy adaptive PID controller has a better control effect ,to improve the automobile ride comfort capability .【期刊名称】《武汉理工大学学报(交通科学与工程版)》【年(卷),期】2015(000)005【总页数】5页(P934-938)【关键词】空气悬架;模糊自适应PID控制;操纵稳定性;车身加速度【作者】詹长书;程崇;孙世磊【作者单位】东北林业大学交通学院哈尔滨 150040;东北林业大学交通学院哈尔滨 150040;东北林业大学交通学院哈尔滨 150040【正文语种】中文【中图分类】U463.330 引言随着汽车行业快速发展,空气悬架在高档轿车上已经逐步开始应用.空气悬架是车辆的重要组成部分,空气悬架对汽车的安全性、稳定性、舒适性有重要影响.空气悬架可以通过控制器控制算法的改变而改变悬架的控制力,从而控制车辆的车身加速度、悬架动行程、轮胎动载荷,因此空气悬架的控制策略对空气悬架有重要意义. 模糊控制是现代智能控制重要分支之一,控制过程中包含了以往的控制经验,具有适应能力强,抗干扰能力强的特点,特别适用于时变性、非线性的控制系统中[1].传统的PID参数经过确定就不能再调节,所以在一些控制系统中不能取得满意的效果[2].针对2种控制器不同的控制特点,把2种控制器结合为模糊自适应PID控制器对空气悬架进行仿真分析.1 空气悬架模型的建立1.1 空气弹簧模型以主副气室一体式空气弹簧为研究对象,主气室和副气室内的气体状态方程为式中:p为气体的压强,Pa;V 为气体的容积,m3;m为气体的质量,kg;R为气体常数,对空气R=287N·m/(kg·K);T为气体的温度,K.主副气室的气体通过节流口进行流动,主副气室中压强较小气室的压强除以压强较大气室的压强≥b时,气流的质量流量不变且稳定;当<b时,气流质量流量与主气室和副气室压力比近似于1/4椭圆关系.b取0.528.节流口气体质量流量表达式为[3]式中:q为气体质量流量;Tmax为气体温度(压力较大的气室);k为绝热系数,k=1.4;pmax=max{p1,p2};pmin=min{p1,p2};p1 为主气室压强,p2为副气室压强;A为节流口有效面积(A=εA0,A0为节流口实际面积,ε为收缩系数).空气弹簧在工作过程中,主副气室内的空气总质量是不变的,但是如果只研究主气室或副气室,则其质量是变化的,根据热力学和流体力学知识,气体的质量变化率为式中:为工作时主气室气体质量变化率;˙m2为副气室气体质量变化率;sgn为符号函数,表达如下.当节流口没有完全关闭时,主副气室是有气体相互流通的,主气室和副气室的压强分别为[4-5]式中:m1为空气悬架主气室气体的初始质量,kg;m2为空气悬架副气室气体的初始质量,kg;p3为空气悬架主气室的初始压强,Pa;p4为空气悬架副气室初始压强,Pa;V1为主气室的有效容积,m3;V2为副气室的有效容积,m3;V3为主气室的初始有效容积,m3;V4为副气室的初始有效容积,m3;V1=V3+x;V2=V4·x;其中为主气室有效容积变化率为副气室有效容积变化率;x为主副气室的高度变化量.当空气悬架的压缩量大于0.03m时,节流口关闭,此时主气室和副气室无气体流通,主副气室的压力可表示为式中:V′3为节流口完全关闭时主气室的有效容积,m3;V′4为节流口完全关闭时副气室的有效容积,m3;p′3为节流口完全关闭时主气室内的气体压强,Pa;p′4为节流口完全关闭时副气室内的气体压强,Pa.由式(5)、式(6)得到节流口未完全关闭时的空气悬架弹簧力为式中:p1 和p2 为式(5)、式(6)所表示的压强.由式(7)、式(8)得到节流口完全关闭时的空气悬架弹簧力为式中p1和p2为式(7)、式(8)所表示的压强;式(9)、式(10)中的S1为空气悬架主气室的垂向有效承载面积,m2;S2为副气室的垂向有效承载面积,m2.1.2 单轮1/4车辆模型文中建立了1/4空气悬架车辆模型,空气悬架是一个复杂的非线性系统,可以根据实际情况进行简化[6].空气弹簧的力学模型见图1.图1 1/4空气悬架车辆模型空气悬架的系统动力学方程为式中:m1为簧上质量;m2为簧下质量;c为悬架阻尼系数;kt为轮胎刚度;z1为车身垂直位移;z2为车轮垂直位移;q为路面输入位移;U系统主动控制力.悬架的模拟仿真参数见表1.2 模糊自适应PID控制器的设计模糊自适应PID控制器是针对空气悬架运用模糊基本的理论,把规则、操作用模糊集表示,把这些模糊规则存入模糊控制器,然后计算机根据悬架的实际振动情况,根据模糊推理,可以自动对PID参数进行自适应调整[7],从而对悬架的振动进行调节.模糊自适应PID控制器的原理见图2.表1 悬架的模拟仿真参数?图2 模糊自适应PID控制器原理框图2.1 PID控制器PID控制器是一种线性控制器,它根据给定信号与实际输出信号之间的偏差作为PID控制器的输入量,并对偏差进行比例运算、积分运算和微分运算,三者的运算结果相加为控制器的运算结果[8],PID控制器的算法表达如下式中:k为采样序号;Kp为比例系数;Ki为积分系数;Kd为微分系数.PID控制器的参数对PID的控制效果有很大的影响,经过整定,得到比例系数Kp =10;积分系数Ki=6;微分系数Kd=1.5.2.2 模糊控制器模糊控制器是模仿人的推理和决策的一种智能控制器.模糊控制器包括输入控制变量和输出控制变量、隶属度函数的类型、模糊控制规则和解模糊化[9-10].其中模糊控制规则是模糊控制器的关键部分,根据技术经验和专家经验进行整理,得到模糊控制规则.选取车身的垂向加速度e和车身垂向加速度变化率ec为输入信号,输出信号为PID控制器的3个系数ΔKp,ΔKi,ΔKd.根据路面的激励模型和车辆的速度,选取输入的基本论域为[-1,1],[-10,10],Kp 的基本论域为[-100,100],Ki的基本论域为[-60,60],Kd的基本论域为[-1 000,1 000],输入输出的模糊论域均为[-6,6].输入量化因子Ke=6,Kec=0.6,输出比例因子Up=16.67,Ui=10,Ud=166.67.输入变量e,ec和输出变量Kp,Ki,Kd的隶属度函数均为三角形分布的隶属度函数.输入输出变量的模糊子集以如下方式划分{负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,ZO,PS,PM,PB},模糊规则表的建主要针对Kp,Ki,Kd3个参数的整定.表2~表4为3个参数的模糊规则表.表2 ΔKp的模糊规则表?表3 ΔKi的模糊规则表?表4 ΔKd的模糊规则表?2.3 模糊自适应PID控制器模型将模糊控制器与PID控制器结合起来得到的模糊自适应PID控制器模型.模糊自适应PID控制器的输入为车身垂直加速度与固定值信号的偏差,模糊控制器的输出ΔKp,ΔKi,ΔKd,模糊PID控制器的输出则为具体模型见图3.图3 模糊自适应PID控制器仿真模型3 仿真过程及结果分析路面激励模型采用滤波白噪声模型[11],选取B级路面等级,车速选择45km/h,仿真时间为30 s以保证结果稳定.分别仿真PID控制和模糊自适应PID控制空气悬架的振动过程,对比2种控制的车身加速度、悬架动行程和轮胎动载荷的均方根值.具体见表5.表5 平顺性对比?根据对比分析,单一的PID控制能够改善车身加速度和小幅度改善轮胎动载荷,但悬架动行程有所提高.模糊自适应PID控制器能够有效改善车身加速度和轮胎动载荷,但悬架动行程也有所提高.但模糊自适应控制器对于车身加速度和轮胎动载荷的改善程度相对比较大,综合比较模糊自适应PID控制器比单一的PID控制器的控制效果要更好.为了比较模糊PID控制和被动控制的差异,绘制了悬架车身加速度、悬架动行程、轮胎动载荷对比曲线.见图4~图6.4 结束语建立了1/4空气悬架模型,在B级路面上通过滤波白噪声激励,模糊自适应PID 控制器能够有效改善振动中的车身加速度和轮胎动载荷,但悬架动行程略有提高.与单一的PID控制相比车身加速度和轮胎动载荷改善明显,悬架动行程略有提高.综合比较模糊自适应PID控制器控制效果更佳.图4 车身加速度与时间仿真曲线图5 悬架动行程与时间仿真曲线图6 轮胎动载荷与时间仿真曲线参考文献[1]高美静.复杂非线性系统的智能控制[D].秦皇岛:燕山大学,2002.[2]李仲兴,李美,张文娜.车辆空气悬架PID控制系统的研究[J].拖拉机与农用运输车,2009,36(5):56-58.[3]郑治国,顾仁康.轻工液压传动与气压传动[M].北京:中国轻工出版社,1994.[4]江浩斌,杜滢君,叶燊辰.新型一体式悬架减振支柱行程相关刚度特性研究[J].振动与冲击,2012,31(2):66-70.[5]邱文军.空气悬架力学特性及主动控制策略的研究[D].长春:吉林大学,2014.[6]詹长书,孙世磊.基于联合型模糊PID的非线性空气悬架建模与控制[J].武汉理工大学学报,2014,33(4):730-733.[7]YANG Qiyao,XU Xing,ZHOU Kongkang,et al.Fuzzy adaptive PID control of Semi-active air suspension[J].2010International Conference on Computer,Mechatronics,Control and Electronic Engineering,CMCE 2010,2010,2:513-516.[8]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010.[9]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术.2011,30(1):166-172.[10]冯勇,吴凯,刘梦安.基于模糊PID算法的汽车半主动悬架振动控制[J].汽车零部件,2012(5):50-54.[11]XIE Zhengchao,WONG P K,ZHAO Jing,et al.A noise-insensitive semi-active air suspension for heavy-duty vehicles with an integrated fuzzy-wheelbase preview control[J].Mathematical Problems in Engineering,2013(5):550-562.。
空气悬架电控系统的参数自整定模糊控制
整模 糊控 制策 略。设 计 了一套 功 能优 良的汽 车 空气 悬 架 电控 装 置并 进 行 了模 拟 实 验 , 实验 结
果表 明 , 该 方 法能够 有效地 降低 车 身垂 直加速 度 , 改善 车辆 的综合 性 能 , 提 高 了小 型客 车行 驶
时车 辆 的平顺 性 。
关键词 :空气悬 架 ; 参 数 自调整 模 糊控制 ;电子 控制 单元 ;加 速度传 感 器 中 图分 类 号 : u 4 6 3 文 献标 志码 : A 文 章编 号 : 1 6 7 4 — 1 3 7 4 ( 2 0 1 4 ) 0 1 — 0 0 9 0 — 0 6
Pa r a me t e r s e l f — t u n i n g F u z z y c o n t r ol f or
a n ai r s u s p en s i o n el ec t r i c al c o n t r ol s y s t e m
第3 5卷 第 1 期
2 0 1 4年 0 2月
长 春 工 业 大 学 学 报( 自然科 学 版 ) J o u r n a l o f Ch a n g c h u n Un i v e r s i t y o f Te c h n o l o g y( Na t u r a l S c i e n c e E d i t i o n )
收、 隔 振 的能 力 以 及 良好 的 通 用 性 和 耐 久 性 [ 1 ] 。
上受 悬架 的影 响 , 而 人 们 对 车 辆乘 坐 舒 适 性 及 安
全性 的要 求越 来越 高 。传统 的被 动悬 架 由于不 能
自动调 节其参 数 , 使其 适应 载荷 、 车速 或路 况等 不 可 测 因素 的变化 难 以满 足 人们要 求 。空气 悬架 是 以空气 弹簧 为弹 性 元 件 , 具 有 随 气囊 压 力 形 状 变
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中 : m 为簧载质量 ; C 为减震器阻尼系数 ; p e 为空 气弹簧相对压力 ; A e 为空气弹簧有效面积 。 将式 ( 3 ) 、 ( 4 ) 分别与式 ( 8 ) 、 ( 11 ) 联立, 即可得到电控悬架系统车身高度调节过程的充气和放 气的数学模型 。
2
高度调节模糊 PID 控制与仿真
σe ≤
pd <1 pu
( 1) 式中: q m 为质量流量 ; μ 为气路流阻系数 ; A 为通过 电磁阀的等效截面积 ; p u 为上游端绝对压力 ; p d 为 下游端绝对压力 ; T u 为上游端气体热力学温度 ; k 为 气体绝热指数,k = 1. 4 ; R 为气体常数 , 对空气 R = 287 N · m / ( kg · K) ; σ e 为临界气体压力比 , 对理想气 体,取 σ e = 0. 528 2 。 空气弹簧在充放气过程中 ,随着高度的变化其容 积也不断变化,因此空气弹簧的充放气过程是一个变 容积的绝热充放气过程 。电磁阀开启时 ,对空气弹簧 充气 ,根据热力学第一定律 ,得到空气弹簧的能量方 程: kRT1 d m1 = V2 dp2 + kp2 dV2 ( 2) 将式 ( 2 ) 两边同时除以 dt ,并将质量流量 q m = d m1 - 代入 ,变形得到空气弹簧充气时压力与流量和 dt 储气罐状态参数之间的微分方程 : d p2 kRT1 q m kp2 d V2 = - - ( 3) dt V2 V2 d t 同理 ,可以得到空气弹簧放气时压力与流量和储 气罐状态参数之间的微分方程为 : dp2 kRT2 q m kp2 d V2 = - ( 4) dt V2 V2 d t 在放气过程中 , 空气弹簧内为变容积绝热放气 , 于是空气弹簧内绝对压力和温度的关系如下所示 : p2 T2 k - 1 = p20 T20 由式 ( 5 ) 可得放气时空气弹簧内温度为 : T2 = T20
式中 : κ 为气体多变指数 , κ = 1. 38 ; p21 为电磁阀关 闭后空气弹簧内气体绝对压力 ; V21 为电磁阀关闭后 空气弹簧内气体容积 。 忽略车辆的轮胎变形 ,簧载质量的位移变化量即 为空气弹簧高度的变化量 ,根据牛顿第二定律 ,建立 单轮簧载质量的动力学方程如下所示 : m d2 x dx +C = p e A e - mg dt d t2 ( 11 )
{
K P = K P0 + α P ΔK P K I = K I0 + α I ΔK I ( 12 )
· 88·
表1 e NB NM NS Z PS PM PB ΔK P 的模糊控制规则 ec NB PB PB PM PM PS PS Z NM PB PB PM PM PS Z Z 表2 e NB NM NS Z PS PM PB NS PM PM PM PS Z NS NM Z PM PS PS Z NS NM NM PS PS PS Z NS NS NM NM PM Z Z NS NM NM NM NB
[5 ]
。模糊控制的优点是它不需要建立被控对象的精
确数学模型 ; 对于无法得到被控对象精确数学模型或 有较强 非 线 性 的 控 制 过 程 可 以 取 得 较 好 的 控 制 效 [6 ] 果 。这正弥补了 PID 控制方法的不足 。由于电控悬 架系统自身参数不能被精确地获得 , 以及系统的非 线性和时滞性 , 因此作者把模糊控制和 PID 控制结 合起来 , 即在系统运行中 , 根据建立的模糊规则进 行模糊推 理 , 对 PID 控 制 器 的 3 个 参 数 进 行 修 改 。 这样就使得控制器既具有较高的控制精度 , 又有较 强的适应性 , 以满足各种状态下电控悬架系统对控 制参数的不同要求 , 从而使车身高度得到良好的调 [7 ] 节 。 文中以车身实际高度与目标高度的偏差 e 及其变 化率 ec 作为模糊控制器的输入变量 ,输出变量为 PID 控制器的 3 个参数的变化量 ,则 PID 控制器 3 个参数 表示如下 :
· 87·
( 10 )
μAp u qm = μAp u
槡( 槡
2 k RT u k + 1
)
( k + 1) / ( k - 1)
pd < σe pu
( k + 1) / k
p21 = p2
( )
V2 V21
κ
2k RT u ( k - 1)
( ) ( )
pd pu
k
-
pd pu
NB NB NB NB NM NM Z Z
NM NB NB NM NM NS Z Z 表3
图 2 和 3 中都同时列出了有模糊 PID 控制器和没 有控制器时车身相对位移的变化曲线 。可以看出 : 在 对车身高度调节过程没有控制时 ,车身高度会出现一 定程度的振荡并且其稳态值与设定目标高度有偏差 ; 而车身高度调节在模糊 PID 控制器的控制下 ,不仅消 除了车身高度的振荡现象 ,而且使车身高度精确达到 设定目标高度并稳定 。
2012 年 3 月 第 40 卷 第 5 期
机床与液压
MACHINE TOOL & HYDRAULICS
Mar. 2012 Vol. 40 No. 5
DOI: 10. 3969 / j. issn. 1001 - 3881. 2012. 05. 026
电控空气悬架车身高度调节的模糊 PID 控制
何二宝,杜群贵,冯元元
( 华南理工大学机械与汽车工程学院 ,广东广州 510640 )
摘要: 针对电控空气悬架车辆车身高度调节过程中出现的振荡和偏离设定目标高度的问题 , 建立了车身高度调节过程 的数学模型,设计了车身高度调节的模糊 PID 控制器并应用 Matlab / Simulink 软件进行了仿真。 结果表明: 应用该控制方法 可以有效地解决上述问题 ,使车身高度精确到达设定的目标高度 。 关键词: 空气悬架; 高度调节; 模糊 PID 控制; 目标高度 中图分类号: U463. 33 文献标识码: A 文章编号: 1001 - 3881 ( 2012 ) 5 - 086 - 3
1. 1
系统简化
为便于研究车身高度调节过程 ,在建立数学模型 过程中做如下假设 : ( 1 ) 在充气过程中把储气罐看做定容积压力恒 定的气源 ; ( 2 ) 将回 路 中 的 电 磁 阀 作 为 等 效 节 流 小 孔 计 [3 ] 算 ; ( 3 ) 由于充放气时间很短 ,可以看做绝热过程; ( 4 ) 气体为理想气体 , 并认为气体在管内为一 元等熵流动 。 基于上假设 ,电控空气悬架系统的气压传动部分 可以抽象为一个变质量系统的充放气过程 ,其简化模 型为图 1 所示 。
1
车身高度调节过程模型建立
车身高度调节过程具体如下 : 对空气弹簧充气 时 ,电磁阀打开 ,储气罐中的压缩气体在压差作用下 经过管路和电磁阀等元件流入空气弹簧 ,空气弹簧内 压力增大 ,使簧载质量升高 ,车身高度到达目标高度 后,电磁阀关闭 ,充气停止 ; 放气时 ,空气弹簧中的 气体经管路和电磁阀排入大气 ,车身高度下降 ,到达 目标高度后 ,电磁阀关闭 。
FuzzyPID Control of Body Height Adjustment for Vehicles with Electrically Controlled Air Suspension
HE Erbao,DU Qungui,FENG Yuanyuan ( School of Mechanical & Automotive Engineering,South China University of Technology,Guangzhou Guangdong 510640 ,China)
( )
k( Βιβλιοθήκη )( )p2 p20
k -1 k
( 6)
空气弹簧的容积为 : V2 = V20 + αx
( 7)
则 d V2 dx =α ( 8) dt dt 式中: V20 为空气弹簧初始容积 ; α 为空气弹簧容积变 化率; x 为空气弹簧高度变化量 。 电磁阀关闭后 ,空气弹簧变为质量不变的密闭系 [4 ] 统,气囊内气体热力学过程为多变过程 ,根据理想 气体状态方程式 : κ κ p2 V2 = p21 V21 ( 9) 得气囊的绝对压力 :
Abstract: In the process of electronic air suspension vehicles body height adjustment,the body height will have oscillation and can not reach the target height. To overcome these problems,the mathematical model of the body height adjustment process was built and the fuzzyPID controller was designed. And simulations were made in Matlab / Simulink. The simulation results demonstrate that the application of fuzzyPID control can effectively solve the above problems and make the body height precisely reach the target height. Keywords: Air suspension; Height adjustment; FuzzyPID controller; Target height
K D = K D0 + α D ΔK D 式中 : K P0 、 K I0 、 K D0 为 K P 、 K I 、 K D 的 初 始 量 ; α P 、 α I 、α D 为校正速度量 。 模糊 控 制 器 采 用 常 用 标 准 模 型 表 示 , 也 称 为 Mamdani 模型 表 示 , 模 糊 控 制 规 则 如 表 1 —3 所 示 。 解模糊规则采用重心法 。