基于VB的船舶液压锚绞组合机检测系统的建立
基于VB的测控装备模拟训练系统设计及实现

基于VB的测控装备模拟训练系统设计及实现
张治杰
【期刊名称】《舰船电子工程》
【年(卷),期】2012(032)005
【摘要】系统采用计算机仿真技术、系统仿真技术、网络技术、串口通信技术,介绍了该系统特点、组成和关键技术,并针对关键技术问题作了深入细致的探讨,给出了解决该问题的途径。
【总页数】3页(P93-95)
【作者】张治杰
【作者单位】海装天津局,北京100076
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.嵌入式舰载电子对抗装备模拟训练系统设计与实现 [J], 张蕾;姚直象
2.基于HLA的装备保障全要素集成模拟训练系统设计 [J], 苏续军
3.基于VB与单片机的模拟训练系统设计 [J], 张浩宇;张旭;胡慧;吕晓峰
4.基于VBS3的装备体系作战仿真评估系统设计 [J], 刘帅;王瑞;张宏江;魏永勇
5.基于SNMP协议的测控装备运管代理系统设计与实现 [J], 王刚;陈华中;王晓;马东阳;张坚英
因版权原因,仅展示原文概要,查看原文内容请购买。
船舶锚系三维建模及拉锚试验的仿真分析
(1)
ψ i =0(……m)
(2)
式(1) 、 (2)中:U --动能; q j --描述系统的广义坐标; ψ i --描述系统的约束方程; F j 在广义坐标方向的广义力; i ---m×1 的拉格朗日乘子列阵。 运动仿真过程就是不断求解上述方程的过程, UG 中嵌入的 ADAMS 求解器中提供了两 种线性代数方程求解方法:CALAHAN 方法与 HARWELL 方法,CALAHAN 方法不能处理 冗余约束问题,HARWELL 方法可以处理冗余约束问题,CALAHAN 方法速度较快。对于 非线性代数方程,则采用修正的Newton-Raphson 迭代算法进行求解。对式(1) 、 (2)可采用 降阶的方式进行求解此微分方程组。 2 锚系运动仿真试验流程 锚系运动仿真主要目的为: 一是检测起锚后锚在上升过程中是否和船体碰撞, 我们称之
基于虚拟样机技术的 VLCC 锚系运动仿真试验技术的研究
联系人地址: 刘志强 江苏科技大学机械与动力工程学院(江苏省镇江市梦溪路 2 号,212003) E-mail: liuecsi@ 研究方向:船舶辅机设计及制造装备、船舶企业信息化技术研究与应用
摘要:本文运用 UG 实现了 290000 吨 VLCC 锚系三维模型的虚拟设计和虚拟装配,并 利用 UG 的 motion 模块对锚系起锚运动和锚-锚唇贴合状态进行了计算机仿真试验研究。实 践表明, 此项技术可以代替制作木模进行模拟拉锚确定设计方案的方法, 提前预示实际安装 时贴合不合理的情况出现,具有节省成本、减少工期、便于修改设计的优点,是值得在船舶 行业推广使用的技术。 关键词:虚拟样机;起锚运动仿真;木模试验 Study on the Anchor Motion Simulation of VLCC Based on Virtual Prototype LI chunjin, LIU Zhiqiang, WANG Mingqiang, QIU x计是否合理,锚在收紧后能否很好地与锚唇贴合,以避 免船舶运动过程中产生晃动及碰撞,我们称之为锚唇贴合仿真检测。
基于VB的升降机防坠安全器检测试验系统的研制
集防坠安全器制动过程中的转矩 、 转速信号, 显示防
甘
肃
科
技
第2 8卷
技术 , 还支 持事 件驱 动 的 工作 方 式 , 些 特 点 使 VB 这
3 软件设计
检 测系统 采用 Vsa ai . i l s60编写 , B以其 可 u B c V
可以很方便地编制数据采集软件 。 在V B应用程序中若要使用 D L中的函数 , L 首 先必 须有 特殊 的声 明 , D c r 明语句 在全 局模 用 ele声 a
录之 间浏览 、 示 和操纵 数 据 。 显
3 3 声 明动态 链接 库 .
研 制完 成后 的系统 主界 面如 图 4所 示 。
图 4 系统 主 界 面
用 户 只需 在控 制界 面 中按 下相 关控 制 按钮就 可 以开始 对转速 、 转矩 的数 据采集 , 系统 开始 对数 据 在 采 集 的同时操 作人 员需要 手动 调节 变频 器 的频率 来 调 节 电机 的转速 , 当转 速 超 过 防 坠 安 全 器 的动 作 速
必行 。
二二器 唧 1, 【
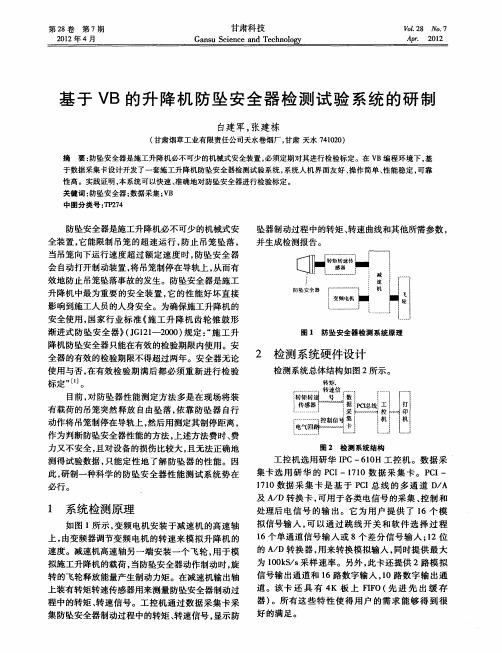
图 1 防坠安全器检测 系统原理
~ 减 一 . 一 速 一 机 一
墅 ~~ 一 传~
㈠一㈠
2 检测 系统硬件设计
检测 系统 总体结 构 如图 2所 示 。
转矩、
图 2 检 测 系统 结 构
工控 机 选 用 研华 IC一 1H 工 控 机 。数 据 采 P 60 集 卡 选 用 研 华 的 P I 7 0数 据 采 集 卡 。 P I一 C 一11 C 1 l 据 采 集 卡 是 基 于 P I总 线 的 多 通 道 D A 7 0数 C / 及 A D转换 卡 , / 可用 于 各类 电信号 的采集 、 制 和 控 处 理 后 电 信 号 的 输 出 。它 为 用 户 提 供 了 l 6个 模
基于VB的计量校准系统软件设计
基于VB的计量校准系统软件设计作者:王卫华陈文须来源:《现代电子技术》2013年第16期摘要:大量校准仪器都配置通用数字通信接口,很容易集成并和计算机互联,提高系统功能和自动化程度。
为使计算机能够有效管理和控制这些配有USB,LAN接口的仪器设备,采用VB语言设计了计量校准用户界面和管理软件,在此描述了多种计量设备的通信管理、操作引导、校准辅助、自动测量、数据记录、文件处理等。
实际校准测试表明,研究结果可以引导计量操作人员完成校准保障作业,减少了人为仪器操作、线路连接等工作失误,提高了计量校准工作的自动化水平和工作效率。
关键词:计量校准;仪器设备; VB编程;通信接口中图分类号: TN919⁃34; TP216 文献标识码: A 文章编号: 1004⁃373X(2013)16⁃0059⁃030 引言在测试计量工作中,大量的标准测量计量仪器配有USB,LAN或RS 232数字通信接口,这些测量仪器以其精度高、功能强、可靠性高等特点在计量校准中发挥了重要作用[1⁃2]。
在对一些复杂系列化设备进行计量校准时,经常需要多种校准仪器协同完成计量校准任务,这就要求计量校准人员不仅要熟练掌握各种被校准设备的校准规程,还要熟练掌握多种校准仪器的功能和操作方法,增加了计量校准人员的工作难度和工作量。
本文针对一些主要标准计量校准仪器,介绍了基于Visual Basic编程语言的计量校准软件,可以有效提高计量校准自动化水平,减少计量校准人员工作强度和人为操作失误,提高工作效率。
1 计量校准软件框图Visual Basic是一种由微软公司开发的包含协助开发环境的事件驱动编程语言,VB拥有图形用户界面(Graphical User Interface,GUI)和快速应用程序开发(Rapid Application Development,RAD)系统,可以轻易的连接数据库,或者轻松的创建ActiveX控件。
VB还提供了USB,LAN和RS 232通信接口驱动程序,编程人员可以轻松地使用VB提供的组件快速设计应用程序,实现对配有USB,LAN和RS 232接口的计量校准仪器进行通信连接和控制管理。
基于web的船舶主机监测报警系统设计
机电技术 2012年12月166基于web 的船舶主机监测报警系统设计刘 凯 徐轶群(集美大学轮机工程学院,福建 厦门 361021)摘 要:船舶主机监测报警系统是现代化船舶自动化机舱的重要组成部分。
文章采用Microsoft Visual Studio 可视化建模、数据库、网络等技术,设计和开发了船舶主机监测和报警系统。
该系统具有网络化和模块化结构,监测、报警、操作和控制功能全部由软件实现,节约成本,方便维护。
关键词:船舶动力装置;机舱;监测系统;报警系统中图分类号:U644.82+1 文献标识码:A 文章编号:1672-4801(2012)06-166-0321世纪科技发展迅速,信息技术和网络技术的发展给世界带来了巨大的变化,引发了各个领域的革命性变革。
现代航运对船舶的自动化程度和信息集成的程度要求越来越高,对于船员的自动化知识的要求也越来越高。
为了满足船员的实际需要,主机监视报警系统应朝着集散结合、信息共享、通信快捷、不易干扰、操作简单、界面友好的方向发展。
目前我国所建造的各种远洋运输的船舶中,大部分监测报警系统都是由挪威的Kongsberg 公司所设计,国内自主开发的监测报警系统目前还不够完善,依然处于研究开发阶段,尚不具备全面投入使用的能力。
本文根据现代船舶主机监测报警系统的要求,设计开发了船舶主机监测和报警系统。
系统功能完善,显示直观,操作简单,覆盖了船舶主机全部运行重要参数。
1 系统的组成本系统由软件和硬件两部分组成。
其中硬件部分由主服务器、监控显示计算机等组成。
系统的硬件组成见图1。
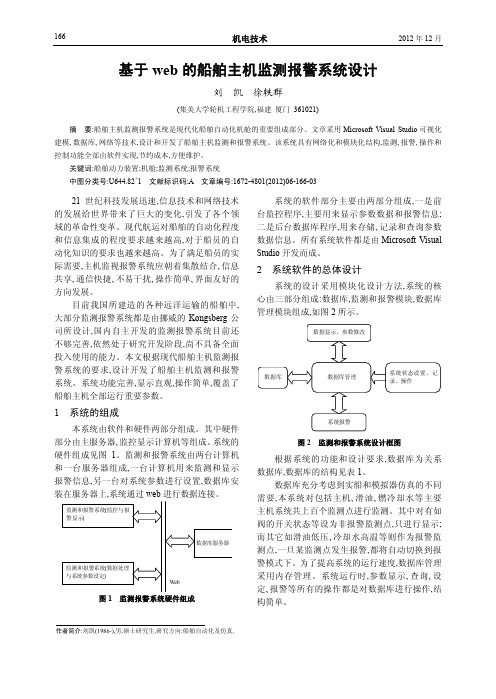
监测和报警系统由两台计算机和一台服务器组成,一台计算机用来监测和显示报警信息,另一台对系统参数进行设置,数据库安装在服务器上,系统通过web 进行数据连接。
W eb监测和报警系统(监控与报警显示)监测和报警系统(数据处理与系统参数设定)数据库服务器图1 监测报警系统硬件组成系统的软件部分主要由两部分组成,一是前台监控程序,主要用来显示参数数据和报警信息;二是后台数据库程序,用来存储、记录和查询参数数据信息。
船舶机械液压系统中液压马达测试系统开发

船舶机械液压系统中液压马达测试系统开发
贾文强
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)9
【摘要】船舶机械液压系统的稳定可靠工作对船舶安全运输具有非常重要的作用。
液压马达是液压系统中的关键部件,本文提出一种基于深度神经网络的液压马达测
试系统,详细分析了液压马达的基本结构,对液压马达测试系统的整体结构进行设计,包括数据采集与控制以及测试装置,重点对负载模拟装置进行设计,并研究了基于深度神经网络的液压马达故障测试流程,最后对某型号液压马达进行测试,结果表明系统具有较好的准确性和稳定性,能够实现对不同类型液压马达的测试工作。
【总页数】4页(P160-163)
【作者】贾文强
【作者单位】太原学院机电与车辆工程系
【正文语种】中文
【中图分类】U667.65
【相关文献】
1.基于OPC与LabVIEW的液压泵和液压马达自动测试系统
2.液压伺服液压缸静
动态性能测试系统开发3.非圆行星齿轮液压马达设计系统开发4.PLC在液压马达
试验测试系统中的应用5.液压系统中液压泵与液压马达的选用
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC的船舶机舱监测报警系统的改进方案
P r o f i b u s — DP状 态 机 ,它 的作 用 主要 是 实 现 智 能 终 端 与 协 议 识 别, 对S P C3芯 片 内部 R A M 进行读写 , 同时 完 成 对 下 位 机 双 口 R A M I D T 7 1 3 0的读 写 控 制 , 保证数据发送的安全 可靠 , 避免 由
处 理
数据交换进入 或
COUNT =I 2 8 7
一
利 用微 处理 器的 系统 资源 , 又
±
进行 重量 计算 ,C O UN T  ̄ O
数 据 接 收 一一 — 接 收 D P R A M输 入 数 据l
退 时 出 器 , 溢 看 门 狗 定
,
波 特
可 以减 少外 围硬 件 电路设计 ,
提 高 系 统 的 可 靠 性 。重 量 控 制
堕 塑 兰 竺 竺 垡 萋 二 = = 夏 垫 塑 兰 垒 2 _ — = = ;
Y t 置故 障标 识
D a t a R e v 中 断 恢 复
/
人
‘
l
w
竺
◆Y
率 中 榆 断 i 恢 l ! l l I 复
l
复 焦J
●
S P C 3 通 讯 程 序 模 块 ・ l S P C 3 制 始 化 I
+
叶 1 断 服 务 程 序
DP RAM I S R
I 中 断 允 许 , 进 程 穿 ’
S P C3I S R
于硬 件 冲 突 造 成 数 据通 讯 错 误 。
基于 P r o f i b u s — DP总 线 技 术 的 烟 支重 量 控 制 系 统 设 计 单片机 A T 8 9 C 5 2程 序设 计 如 图 7所 示 。 首 先 对 单 片 机 系 统
基于LabVIEW的机电设备状态监测与故障诊断系统设计
软件开发与应用Software Development And Application电子技术与软件工程Electronic Technology & Software Engineering基于LabVIEW的机电设备状态监测与故障诊断系统设计蒋方平庄竞(济宁职业技术学院山东省济宁市272037 )摘要:本文分析了设备状态检测和故障诊断的基本原理,研究基于L ab V IE W软件的开发平台,设计具体的机电设备状态监测和故障 诊断系统方案。
这一研究通过计算机来实施软件控制和数据采集,还能够做好信号处理和结果分析,优点突出。
关键词:L a b V IE W;机电设备;状态监测;故障诊断基于设备运行稳定性考虑,设备状态监测和故障检修就显得很 有必要,这是提前发现设备微小故障的前提,对于减少故障发生率,降低设备维修成本,提升设备运行效率很有必要。
而传统监测仪器 使用成本高,技术相对滞后,借助计算机技术的虚拟仪器,可以保 持技术水平,降低设备维修费用,还能提升设备开放性和灵活性,以LabVIEW软件来开发机电设备状态监测和故障诊断系统,可以 发挥虚拟仪器的作用,提升测试的精准度和可靠性。
1机电设备状态监测和故障诊断系统原理机电设备状态监测和故障诊断是一种以检测技术、识别理论、信号处理、预报决策等技术为基础的综合性监测诊断技术,主要服 务于工业生产,能够提升生产效率,这一技术融合了多种学科技术,属于前沿的高新技术之一。
目前,设备状态监测和故障诊断技术己 经实现了在相关设备监测和诊断中的有效应用,对于设备安全、事故分析、性能评估等工作具有很好的辅助作用,提升了设备的安全 有效运行效益。
就设备状态监测和故障诊断系统的应用原理来看,结合对于设备信号、状态等的测取,对设备故障进行诊断,就该系 统功能来看,主要包含以下几方面:状态监》借助各类传感器,对于设备的温度、振动、流量、压力、开关时间等参数进行记录和信息传送,对于这些有代表性和故障诊 断性的重要特征信号,为在这些信号中提取有征兆的信号提供依据。
基于波浪补偿技术的船用起重机系统的改进
波浪补偿技术是为 了消除 两船相 对运动 的影 响 , 在机械设备上应用一定 的机械装置减轻随机相对运动 的影响。当前 波浪补 偿装置 的实现方 式 主要 有两 种 : ( )利用装备的 自身挠性结构 和人力控 制实现补偿 ; 1 ( )利用机械或者液压系统实现补偿 。 2 该 系统采 用液压 系统实现张力补偿 。船舶相对运 动使得张力发生变化 ,根据 钢缆 的张力变化 ,通过溢 流 阀控制 液压 马达 的工作油 压 ,从 而控 制 马达 的扭
基于 波浪 补偿 技 术 的船 用 起重 机 系 统 的改 进
王 洪 波 ( 海军蚌 埠 士官 学校 航 海 系 ,安徽 蚌 埠 2 3 1 ) 302
摘要 :针对当前船用起重机波浪补偿能力不足 ,提出其起升部分液压系统改进 方案 ,即通过 溢流 阀调定 液压马达进 油 侧的工作压力大小来调定绞车拉力 ,实现波浪补偿 。该方案具有一定 的现实意义 。 关键词 :波浪补偿 ;起重机 ;液4 0卷
用度 2~3 ,加 工 表 面 粗 糙 度 数值 小 ,加 工 表 面 倍
质量好 。
综上所 述 ,采用顺铣加工表面粗糙度数值 小 ,质
量好 ,刀具耐用度高。但 由于普通铣床进给机构均采 用滑动摩擦 的丝杠螺母副传动 ,没有采用消除侧 向间 隙的 机 构 ,侧 向 间 隙 大 ,存 在 着 工 作 台窜 动 引 起 “ 啃刀 ”或 “ 打刀” 的安全 隐患 ,因此普通铣 床基本
阀 、节 流阀 、蓄能器 、辅助组件等组成 。
资会 因船体 的摇晃而摇摆 、下降速度过快 、物资与被 补给船的 甲板 发生强 烈碰撞等 。然而很多船用起重机 没有配备相应 的波浪补偿 系统 ,不 能对 吊索 收放速度 实施有效控制 。作者对船用起重机进行改进 ,使 吊运 物资在 接收舰 甲板平稳下落 ,减少 冲击 ,从而避免舰
基于虚拟仪器的船用柴油机监测系统
收 稿 日期 :0 00—6 2 1 —42
修 回 日期 :0 00 7 2 1 —51
模块 , 内置 可直接 与传感 器/ 调节器 连接 的信 号调 理 。这种 开放性 、 低成 本 的构架设 计 , 得用 户可 使
作者简介 : 刘李锋 (9 7) 男 , 1 8一 , 硕士生 。
以访问到底层的硬件资源 , 使用高效 的I b I W VE a
摘
要: 为开发基于虚拟仪器 的船舶柴油机状态监测系统 , 利用传感器 和数 据采集模块 获取柴油机敏 感
信号 , 借助 L b IW 软件平台 , aVE 综合利用热力参数分析法和振动分析法 , 对采集 的信号 进行分析 、 处理 , 将 并
数据传输 到现场触摸屏电脑和集 控台工业控制计算机 , 到柴油机 监测 系统 的人 机界面 , 实时掌握 柴油 机 得 可
第 4 O卷
第 3期
船 海 工 程
S P & OCEAN HI ENGI NEE NG RI
Vo . 0 No 3 14 .
21 0 1年 O 月 6
J n 2 1 u .0 1
基 于 虚拟 仪 器 的船 用 柴 油 机监 测 系统
刘 李锋 , 凯生 鲁
( 武汉理 工大学 能源与动 力工程 学院, 武汉 4 0 6 ) 30 3
基 于虚拟 仪器 系统设 计 柴油机 监测 系统 。
首 先对 柴油 机信 号 进 行 分类 , 取 相 应 的传 选
自动化 控制 器 C mpcRI c I , 是 一 种 工 o at O(R O)它 业 化控 制和采集 系统 , 由实时控 制器 、P A 机 箱 FG 和信号 采集 、 通信模 块构 成 。实时控 制器 是 c ( RI) 系统 中负责信 号 处 理 和分 析 的 主体 , 一 种 低 功 是 耗 实时 嵌 入式 处 理 器 。 F GA 机 箱 包 含 可 编 程 P
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分 组成 :手 动收放 缆绳液 压系统 、缆绳恒 张力 调节系统
和 模 拟 加 载 系 统 ,液 压 控 制 原 理 如 图 1 示 。 定 量 泵 3 所 以
一
统和 数据采集 分析软 件 。端子 板采用P D. AD型号 , CI 4
用 于 现 场 信 号 线 与 板 卡 过 渡 连 接 和 低 通 滤 波 、I / 换 等 V变 信 号 处 理 。其 连 接 方 式 如 图2 示 。 所 】
溢 流 阀 设 定 值 越 大 其 差 越 大 ,可 以从 图8 中找 出实 验 室 中
试 验 中 固 定 恒 张 力 泵 溢 流 阀 于 35 a 开 动 恒 张 力 .MP , 系 统 泵 , 由于 缆 绳 松 弛 ,恒 张 力 泉 工 作 , 拉 动 缆 绳 ,后 缆 绳 张 力 固定 于 26 N左 右 ,液 压 油 马 达 停 止 收 揽 过 程 。 . k 海 浪 模 拟 缸 伸 出 ,设 置 模 拟 海 浪 作 用 力 周 期 为 7 ,加 大 s
压力变送器 ,采用硅压力敏感芯 片,选用 转化为0 1mA ~0
标 准 电信 号 输 入 到 采 集 卡 中 。在 油 马 达 转 轴 中 心 安 装 了
采 集转速 信号 的光 电编码 器 ,通过 光 电转换将 输 出轴 上
的位 移 量 转 换 成 数 字 量 的 传 感 器 。 控 制 器 由 比 例 溢 流 阀 及 电磁 换 向 阀组 成 , 通 过 电压 值 控 制 比例 溢 流 阀 的溢 流 压 力 ,从 而 控 制 系 统 的压 力 实 现 对 海 浪 力 度 的 模 拟 。通 过 输 入 频 率 控 制 电磁 阀 的换 向 ,从 而 控 制 系 统 的 通 断 , 模 拟 海 浪 的撞 击频 率 。 3 )检 测 硬 件 系 统 的 总 体 构 成 硬 件 检 测 系 统 主 要 由工 控 机 、P I1M F 采 集 卡 、 C 一6 T PI 4 C D一AD端 子 板 、 拉 力 传 感 器 、流 量 计 、压 力 传 感 器 , 转 速 传 感 器 等 硬 件 设 备 组 合 。 硬 件 检 测 系 统 的 总 体 组 成
海浪模 拟缸 的力度 ,缆绳 的力度加 大,缆绳 张力增加 到 系统液 压油马达 开始反转 ,实
停 止 模 拟 缸 的 运 动 , 从 而 使 缆
锚 绞 组 合机 系 统 溢 流 阀值 对 应 的 产 生 的最 大 缆 绳 张 力 ,在 实 际 运 用 中可 以提 供类 似 的数 据 库 , 根据 海 海 浪情 况 设 定 溢 流 阀 的值 ,从 而 节 约 资源 ,避 免浪 费 。
在V B系 统 中建 立 如 图 4 示 的 可 视 化 界 面 , 点 击 按 所
钮得 到所测值 的 曲线变化 关系 ,点击 加载和清 零可 以控
制 溢 流 阀 的 压 力 值 和 方 向 阀 频 率 值 。 采 集 到 数 据 采 集 流
程 如 图5 示 。 所
O l 2 3 4 5 e 7 日 9 O … I t l5 1 l l t 0 2l 2 23 2t 25 20 2 6 7 8 0 2 2 7 28
41 . 啤 ” 』 /砹止 『 : lJ : 【 l 『 响
海 浪 作 用 周 期 设 定 为 1s 0 ,恒 张 力 溢 流 阀值 分 别 设 定 为3 P 、 35 a M a .MP ,控 制 海 浪 模 拟 作 用 力 从 d N 大逐 渐 增 , 大 , 当作 用 力 到达 一 定 程度 时液 压 马 达 开 始 反转 动 ,缆 绳 松 弛 时 则 马达 会 正 转 拉 紧 缆 绳 ,固 定 于 某 个 值 。 山 图8 中 可 知 收揽 后 的 拉 力值 较 小 ,不 同 的溢 流 阀压 力 值 收揽 后 的 压 力 基本 差 距 不 大 ,可 以使 船 舶 免 受太 大 的靠 紧 力 ;而 当 海 浪 作用 时则 需 要 很大 的力 才 可 以拉 动 船 舶 ,而 日恒 张 力 .
图2 数 据 采 集 卡 和 端 子 板 的信 号 传 递 过 程 2 )传 感 器 和 控 制 器
在 实验 台中选用 并安装 了三个传感 器 :在 缆绳与
潮 汐 涨 落 模 拟 器 连 接 处 安 装 了采 集 缆 绳 张 力 信 号 用 的YL 一
5 1 力 传 感 器 。传 感 器 产 生 4 2 mA电流 , 由于 采 集 卡 3拉 ~0
定 的排 量 提 供 液 压 马 达 7 转 ,带 动 缆绳 收 或 者 放 ,只 旋
要 手 动 调 节 换 向 阀 1 的方 向 就 可 以 变 换 马 达 的 转 向 , 从 6
而供 船舶平 时的手 动收放 缆过程 。在船舶 靠港期 间 ,换
向 阀 1 固 定 于 打 开 位 置 不 动 , 1换 向阀 处 于 中位 ,泵 3 2 6 停 转 ,泵 2 始 运 转 ,通 过 调 定 溢 流 阀 1 的压 力 值 , 可 以控 开 1
■ _■。1 黼 _ -.
— 0 ● P C卜
l 牲 _ 入对 j J 机 通 苴 T —帆 ● ‘
._ _ I
—
一
显 屏
彰 功
能 撒 八娆 }
} l l I彖 缆 i 辩 缸
垃 改
嚣
● 一 … C一 梅
图 3 硬 件 结 构 示 意 图 一
时 『} ’ iI
图7 锚 绞 组 合 机 自动 收 揽 和 放缆 过 程 检 测
, 。
{
目
舶
¨t
42 J ∞f
l
定 L 批 " 数 1
达产 生的逆转 力矩作用和 摩擦力之和 F B,张 力 存 F F 和 B 之 间 是 缆 绳 止 住 不 动 , 工 作 油 压 不变 。 若 大 于F B则 缆 绳 会 松 出 ,油 压 会 升 高 。
中 输 入 为 0 1 V 在 输 入 信 号 电 路 中 加 入 5 0 电阻 。在 ~0 , oQ 手 动 换 向 阀 后 安 装 了 采 集 系 统 压 力 信 号 用 的KYB1 系 列 8
统 ,通 过控制方 向阀6 的换 向频率和 比例 溢流 阀5 来模 拟
力 度 的 撞 击 的 方 向和 力 度 。
l
l 5 机电设备 6
苎 J
回
_ _J
力 和 液 压 马 达 转 速 的 曲线 图 如 图7 示 。 比较 两 图 马 达 开 所 图 5多通 道 数 据 采 集 流 程
始 反 转 的 力 度 值 , 由图 6 知 缆 绳 张 力 1 .k - 屿达 中 94 N ̄ 开 始 反 转 ,而 存 图7 张 力 1.k 中 68 N时 液 压 马 达 已经 开始
的 作 用 , 固 定 恒 张 力 系 统 溢 流 阀压 力 值 时 ,缆 绳 收 放 缆 仍,¨ 。一 一 { ■■§ 作 用 力 不 。收 揽 时最 终 缆 绳 产 生 的拉 力值 F 小 , 当风 较
浪 力度 增 力 时 ,风 浪 力 度 F ¨ A必 须 大 于恒 张 力 系 统 液 压 马
em I C Resear cn
■
_一
■
术交流
VB中 建 立 可 视 化 平 台 界 面 , 利 用 VB的 强 大 功 能 和 各 个 绳 张 力 值 卜 , 同 时 停 止 恒 张 力 泵 ,运 行 中 马达 受 冲 击 降 时 会 有 部 分 缓 动 , 所 以在 图 中 在 很 短 的 时 间 内 出 现 很 小 转 速 , 但 不 影 响 锚 绞 整 体 的 状 态 , 缆 绳 张ห้องสมุดไป่ตู้力 和 液 压 锚 绞 组 合 机 曲线 关 系 如 图 6 示 。 所
缆 换 向 阀 1一 3液压 马 达 1。 量 计 1一 护 阀 1. 动 收 放 4流 5保 6手
缆 绳 换 向 阀
。竺一_ P6 ●_ } C _ I 。竺 _ - 。_ 1 。_ __ -登 __ 五 I ^  ̄ " I D
堂— 一O } 端 _ 舢 4 . -  ̄ 板
如 图3 示 。 所
l ,一 量 泵 441溢 流 阀 5海 浪 力度 设 定 溢 流 阀 6海 浪 , 3定 2 —.- . 一
生 竺 . 竖
频率设定换 向阀 7单向节流阀 8海浪模拟缸 9缆 绳拉 一 . -
力传感 器 1. 0背压 阀 1- 1缆绳力度设 定溢流阀 1一 2 自动收放
分 别 为 D I 出 和 D/ 输 出 , 分 别 控 制 海 浪 的 频 率 的控 制 / 输 A
和 海 浪 的力 度 摔 制 。 通 过 延 时 函 数 建 立 频 率 拧 制 模 块 , 实现 对 频 率 的控 制 。
4实 验 数 据 及 分 析
锚 绞组合机收 放缆过程 中由于系统 的泄 露和摩擦力
时 阿 t ●
蠢舶j压赫鼓机潮控摹蟪 l
图6锚 绞 组 合 机 自动 收 揽 和 放 缆 过 程榆 测 冈
脚
l
坤
试 验 海 浪 周 期 为6 , 恒 张 力 系 统 设 为 35 a 定 s .MP ( 缆绳 张 力 范 围 ) ,在 模 拟 海 浪 作 用 下 得 锚 绞 组 合机 缆 绳 张
芷
} _ )瞧 卑
图 1船 舶 锚 绞 组 合 机 液 压 系 统 原 理 图
2锚 绞机检 测系统硬件和软件设计 1 )采集卡
实验选 用P I1 MF C 一6 T多功能模入模 出接 口卡,该卡
3检测系统软件组成
测试 系统 主要 是在VB软件 环 建立 的,在
机 电设 备
5 5
传感 器 、控制 器 ,完成对 信号 的采 集及信 号输 出控制 。
软 件 主 要 由 下 列 各 模 块 组 成 :数 据 采 集 控 制 公 共 模 块 ; 信 号采 集 模 块 ;信 号输 出控 制 模 块 。