CM嵌入式系统体系结构
CM嵌入式系统体系结构-2022年学习资料

Cortex-M3与ARM7的性能比较-名称。-ARM7TDMI-架构。-ARMv4T冯.若依曼-ARMv -M哈佛-ISA支持。-Thumb/ARM-Thumb/Thumb-2-流水线。-3级-3级+分支预测-中 -FIQ/IRQ-240个物理中断。-中断延时。-24~42个时钟周期。-12个时钟(末尾连锁仅6个)·眠保护。-无-内置-存储器保护。-8段存储器保护单元-硬件除法-2~12个时钟周期-运行速度-0.95 D IPS/MHZ-1.25 DMIPS/MHZ-功耗。-0.28 mW/MHZ-0.19 mW/MHz-面积 -0.62mm2〔仅内核-0.86mm2内核+外设a
支持2种模式和2种访问-1.工作模式与访问权限的关系-Handler-处理模式-始终特权访问-私有模式-可 特权访问-线程模式-也可以用户访问-非私模式-Thread
特权访问和用户访问-2.特权访问和用户访问之间的相互转换-复位-线程模式-异常-处理模式-CONTROL[ ]=0-异常退出-LCONTROLIOJ-1-MSR指令置位-CONTROL[O]=1
第2章ARMCortex-M3体系结构
Cortex-M3内核的主要特点-功耗低-2uW-内核的门数少,具有优异的性价比-中断延迟短-调试成本低有嵌套向量中断控制器-NVIC-处理器采用ARMV7-M架构-具有可裁减的存储器保护单元MPU-总线接口
2.1 ARM Cortex-M3处理器内核-CM3处理器内核是ARMV7-M体系结构:-1.CPU中央处 器32位-Cortex-M3芯片-由ARM设计-Cortex-M3内核-调试系统-内部总线-外设-存储器芯片制造商-设计开发-时钟和复位-I/o
STM32F103系列内部框图-STM32F10x Series Block Diagram-32位的Co tex3微处理器-CORTEXM3-分1-可嵌套的向量中断轻制器NVIC和43个可-CPU-32k0-12 k日-Power Supply-72MH2-Flash Memory-Reg 1.8V-屏蔽中断且有16个 编程优先级-5:2kB to come-POR/PDR/PVD-in 2008-内嵌内存:-海LASH:最 128E字节(2008年可达512kB-嚣-XTAL oscillators-Uyta20 kB SRA图 321z+4-15MHz-意SRA1M:最大20K字节2008年末可达64kB-JTAG/SW Debug 6i4kB to come in-Int.RC oscillators-7个通道的DMA-Nested v ct IT Ctrl-40KHz +8MHz-内部自带电压调节器及多种低功耗模式:-1x Systic T mer-20B Backup Regs-PLL-@供电范围:2W-一3.6V-。4种带自动唤醒的低功耗模式 Reset Clock-7 Channels-Control-RTC/AWU-@有上电复位/掉电复位和可编 电压检测-20个字节寄存器的备份区域-ARM Peripheral Bus-Bridge-ma436耐Hz 1x USB 7.0FS-使用带时钟安全系统的时钟控制模块进行-1x 16.bit PWM-频率管理和监控 频率最高可达72Mz-Synchronized AC-3x1 5-bit Time时-1x bxCAN 2 0B-@丰官的外设和I0口主-Up to 16 Ext.ITs-Independent-意内舷带有电池备用 能的低功耗的RTC-Watchdog-2x USART/LIN-。双看门狗结构-Smartcard IrD -3214980/0g-Window-Modem Control-■5个有高级控制特色的定时器(含Cort x的SysTick-通9个通讯接口-1x SPI-Zx 12-bit ADC-1×SPI-最多可有80个[ 100脚封装,有16外部中断和事件-16 channels/-1x USART/LIN-1M8p8-■最多 使用2个12位1M即s的ADC,且最多可用16个通-Smartc ard/lrD a-道,内嵌误差位±1. °且与测量温度成线性比例的-Modem-Ctrl-Temp Sensor-2x RC-温度传感器-操作模式:-处理模式和线程模式-程序执行设置2种权限:-用户级和特权级。-异常 andler的代码-handler模式-错误的用法-主应用程序的代码-特权级可以访问任意资源,用户级对有些 源的访问有限制或不允许访问。
嵌入式系统体系结构

嵌入式系统体系结构嵌入式系统体系结构所有带有数字接口的设备,如手表、微波炉、录像机、汽车等,都使用嵌入式系统,有些嵌入式系统还包含操作系统,但大多数嵌入式系统都是由单个程序实现整个控制逻辑。
下面是店铺整理的关于嵌入式系统体系结构,欢迎大家参考!嵌入式系统体系结构:嵌入式系统的组成包含了硬件层、中间层、系统软件层和应用软件层。
1、硬件层:嵌入式微处理器、存储器、通用设备接口和I/O接口。
嵌入式核心模块=微处理器+电源电路+时钟电路+存储器Cache:位于主存和嵌入式微处理器内核之间,存放的是最近一段时间微处理器使用最多的程序代码和数据。
它的主要目标是减小存储器给微处理器内核造成的存储器访问瓶颈,使处理速度更快。
2、中间层(也称为硬件抽象层HAL或者板级支持包BSP).它将系统上层软件和底层硬件分离开来,使系统上层软件开发人员无需关系底层硬件的具体情况,根据BSP层提供的接口开发即可。
BSP有两个特点:硬件相关性和操作系统相关性。
设计一个完整的BSP需要完成两部分工作:A、嵌入式系统的硬件初始化和BSP功能。
片级初始化:纯硬件的初始化过程,把嵌入式微处理器从上电的默认状态逐步设置成系统所要求的工作状态。
板级初始化:包含软硬件两部分在内的初始化过程,为随后的系统初始化和应用程序建立硬件和软件的运行环境。
系统级初始化:以软件为主的初始化过程,进行操作系统的初始化。
B、设计硬件相关的设备驱动。
3、系统软件层:由RTOS、文件系统、GUI、网络系统及通用组件模块组成。
RTOS是嵌入式应用软件的基础和开发平台。
4、应用软件:由基于实时系统开发的应用程序组成。
嵌入式芯片体系结构介绍1.嵌入式微处理器(Micro Processor Unit,MPU)嵌入式微处理器是由通用计算机中的CPU演变而来的。
它的特征是具有32位以上的处理器,具有较高的性能,当然其价格也相应较高。
但与计算机处理器不同的是,在实际嵌入式应用中,只保留和嵌入式应用紧密相关的功能硬件,去除其他的冗余功能部分,这样就以最低的功耗和资源实现嵌入式应用的特殊要求。
嵌入式系统硬件体系结构设计

一、嵌入式计算机系统体系结构体系主要组成包括:1。
硬件层硬件层中包含嵌入式微处理器、存储器(SDRAM 、ROM 、Flash 等)、通用设备接口和I/O 接口(A/D 、D/A、I/O 等).在一片嵌入式处理器基础上添加电源电路、时钟电路和存储器电路,就构成了一个嵌入式核心控制模块.其中操作系统和应用程序都可以固化在ROM 中.2. 中间层硬件层与软件层之间为中间层,也称为硬件抽象层(Hardware Abstract Layer ,HAL )或板级支持包(Board Support Package ,BSP ),它将系统上层软件与底层硬件分离开来,使系统的底层驱动程序与硬件无关,上层软件开发人员无需关心底层硬件的具体情况,根据BSP 层提供的接口即可进行开发。
该层一般包含相关底层硬件的初始化、数据的输入/输出操作和硬件设备的配置功能。
软件层功能层3。
系统软件层系统软件层由实时多任务操作系统(Real-time Operation System,RTOS)、文件系统、图形用户接口(Graphic User Interface,GUI)、网络系统及通用组件模块组成。
RTOS是嵌入式应用软件的基础和开发平台。
4. 功能层功能层主要由实现某种或某几项任务而被开发运行于操作系统上的程序组成。
一个嵌入式系统装置一般都由嵌入式计算机系统和执行装置组成,而嵌入式计算机系统是整个嵌入式系统的核心,由硬件层、中间层、系统软件层和应用软件层组成。
执行装置也称为被控对象,它可以接受嵌入式计算机系统发出的控制命令,执行所规定的操作或任务。
硬件的设计本网关硬件环境以单片机S3C2440芯片和DM9000以太网控制芯片为主,实现RJ45接口和RS232接口的数据传输。
内容包括硬件环境的初始化,数据的收发控制,封包解包设计,操作系统的移植等。
硬件框图硬件框图是简单的将每个功能模块列出,也是一个基本的模块组合,可以简洁的每个模块的功能体现出来。
新型自动站使用手册2
第二部分新型自动气象站的系统结构与原理2、新型自动气象站的系统结构与原理2.1、新型自动气象站应用到的新技术在新型自动气象站中应到了两项比较新的技术,即:嵌入式系统技术和外部现场总线技术。
2.1.1、嵌入式系统技术嵌入式系统是以高性能CPU数据处理器为核心处理器,嵌入操作系统,配置相关的外围组件,构成单板电脑系统。
高性能的CPU一般是指32位CPU,包括:ARM7系列、ARM9系列以及现在比较新的ARM Cortex M3系列或其他系列CPU等。
操作系统嵌入实时性比较好的操作系统,一般可以嵌入:µC/OS-II、FreeRTOS、µClinux 等。
以上操作系统的特点是:实时性比较好,规模相对比较小,所需要的硬件资源也不大。
但功能相对简单一点。
对于功能要求比较多的可以选用Linux操作系统或WindowCE操作系统。
其特点是:功能比较齐全,基本上具备标准电脑的全部功能,所构成的系统又称单板电脑。
Linux操作系统是开源的可以从网络上找到;WindowCE在使用时是需要付版权费用的。
外围部件配置基本上按照标准电脑的部件配置,包括:Flash存储器、RAM存储器、CF 卡(或SD卡)存储器、以太网络接口电路以及TCP/IP通讯协议、USB通讯端口、多个RS232/RS485串口、CAN总线。
图一、嵌入式系统基本结构图嵌入式系统的数据综合处理能力非常强大,在新型自动站系统中引入了嵌入式系统,可以大大提高自动气象站的数据处理能力,使很多复杂的数据分析、处理计算功能在数据采集器端得以实现。
嵌入式系统丰富的外设处理单元、多种通讯端口,可以非常方便地实时自动气象站的数据通讯处理、远程访问的功能。
2.1.2、外部总线技术外部总线是用来连接各个数据处理控制、数据处理单元,并完成数据传输、通讯处理功。
外部总线的功能就是实现多个数据处理控制、数据处理单元之间的数据通讯;外部总线的的电气结构要求简单,而且数据传输要稳定可靠。
嵌入式系统组成结构简介

嵌入式系统中的输入形式一般包括触摸屏、语音输入、按键和虚拟键盘等
输出设备则主要有LCD 显示和语音输出
外围接口主要有GPIO、串口、I2C总线、USB总线和IEEE 1394总线等等
怀特电子高可靠性存储器系列 IDT公司FIFO及双口RAM Cypress公司高速SRAM系列 现代电子公司SDRAM系列 Intel公司 大容量Flash系列
嵌入式系统硬件
第二讲 嵌入式系统的组成结构
嵌入式系统的组成结构
嵌入式系统的硬件组成
嵌入式系统硬件涉及的几个关键概念
嵌入式操作系统
嵌入式操作系统涉及的几个关键概念
特征:MMU, Cache 最快频率、最高性能、合理功耗
特征:MPU, Cache 实时响应、合理性能、较低功耗
特征:no sub-memory system 一般性能、最低成本、极低功耗
嵌入式外围设备:在嵌入式系统硬件构成中,除核心控制部件(嵌入式微处理器/DSP为核心的微控制器、SoC)以外的各种存储器、输入/输出接口、作为人机接口的显示器/键盘、串行通信接口等。
嵌入式软件系统的分类
嵌入式软件
系统软件
支撑软件
应用软件
控制、管理计算机系统的资源
嵌入式操作系统 嵌入式中间件(CORBA、 Java) 等等
辅助软件开发的工具
系统分析设计工具 仿真开发工具 交叉开发工具 测试工具 配置管理工具 维护工具等
面向应用领域
手机软件 路由器软件 交换机软件 飞控软件等
指令寄存器
控制器
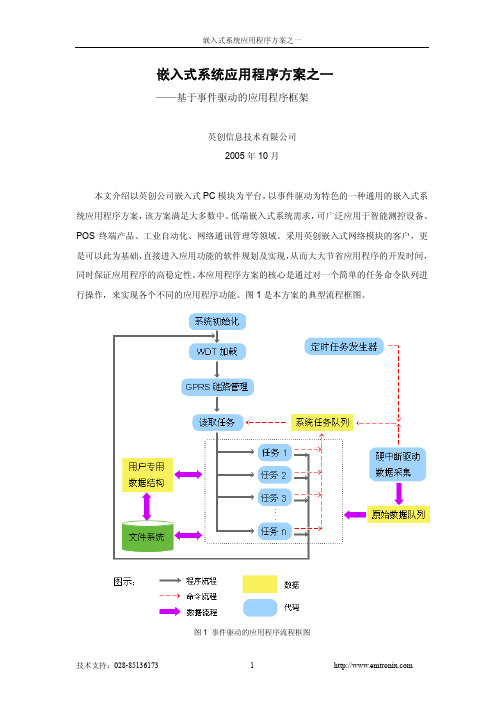
嵌入式系统应用程序方案之一——基于事件驱动的应用程序框架
列,以启动相应的处理。
数据流程
技术支持:028-85136173
2
嵌入式系统应用程序方案之一
各个任务模块的主要功能之一就是对各级应用数据进行必要的加工,并形成新的数据。 典型的数据加工可以是:
对串口来的数据进行帧格式分析,提取相关数据,即通常的通讯规约分析; 对 AD 采集的原始数据进行某种统计处理,提取特征数据; 读取数字输入状态,进行必要处理; 读取网络报文,进行必要的应用层规约解析 应用数据存文件,文件数据处理等等 由于每个任务的执行机会具有一定的不确定性,因此需要对数据开设一定的缓冲区,对 一般的应用来说,数据处理通常都是顺序进行的,所以数据缓冲区的结构通常采用 FIFO 数 据结构,缓冲区的数据单元即可是简单的字节、字,也可以是复合的数据结构。在英创提供 的程序中,串口的数据缓冲区就是采用的 FIFO 数据结构,数据单元为一个字节,FIFO 结 构的数据缓冲区也称为环型 buffer。 可以由一个任务作数据处理,另一个任务作数据传送,对多任务共享的单一数据单元, 可通过设置信号灯的方法来确保数据单元的完整性,对多个数据单元,同样可考虑采用 FIFO 数据结构。对数据响应时间有严格要求的应用,也可以用一个任务实现数据采集处理和网络 通讯全过程。 以下具体介绍实现上述方案的主要代码。建议用户在阅读本文之前,已对英创嵌入式模 块的功能测试程序有了基本了解。
// 可以根据应用定义更多的命令
#define #define
MaxCmdStack 400
PARLEN
14
// 定义系统任务队列的长度 // 每个命令所带参数的长度
class TaskQueue
{
static unsigned int PutIdx;
BSP基本概念
1BSP概述BSP即Board Support Package,板级支持包。
它来源于嵌入式操作系统与硬件无关的设计思想,操作系统被设计为运行在虚拟的硬件平台上。
对于具体的硬件平台,与硬件相关的代码都被封装在BSP中,由BSP向上提供虚拟的硬件平台,BSP与操作系统通过定义好的接口进行交互。
BSP是所有与硬件相关的代码体的集合。
一个成熟的商用操作系统,其被广泛应用的必要条件之一就是能够支持众多的硬件平台,并实现应用程序的硬件无关性。
一般来说,这种无关性都是由操作系统实现的。
但对于嵌入式系统来说,它没有像PC机那样具有广泛使用的各种工业标准、统一的硬件结构。
各种嵌入式系统各不同的应用需求就决定了它一般都选用各自定制的硬件环境,每种嵌入式系统从核心的处理器到外部芯片在硬件结构上都有很大的不同。
这种诸多变化的硬件环境就决定了无法完全由操作系统来实现上层软件与底层硬件之间的无关性。
因此各种商用实时操作系统,都采用了分层设计的方法,它将系统中与硬件直接相关的一层软件独立出来,称之为Board Support Package,简称为BSP。
顾名思义,BSP是针对某个特定的单板而设计的。
如果没有单板支持软件包,则操作系统就不能在单板上运行。
并且它对于用户(指开发者)也是开放的,用户可以根据不同的硬件需求对其作改动或二次开发。
BSP 在嵌入式系统中的角色,很相似于在PC系统中的BIOS和驱动程序的地位。
BSP的具体结构和组成根据不同的嵌入式操作系统而不同。
BSP的开发要求设计人员具备软硬件方面的综合知识。
BSP软件与其他软件的最大区别在于BSP软件有一整套模板和格式,开发人员必须严格遵守,不允许任意发挥。
在BSP软件中,绝大部分文件的文件名和所要完成的功能都是固定的。
所以,BSP软件的开发一般来说都是在一个基本成型的BSP软件上进行修改,以适应不同单板的需求。
针对某类CPU的硬件单板,嵌入式操作系统(如vxWorks)通常提供有其DEMO 板的BSP, 这些程序位于指定的目录之下。
嵌入式系统体系结构
嵌入式系统体系结构嵌入式系统体系结构是指嵌入式系统在硬件和软件层面的组织结构和设计原则。
嵌入式系统体系结构的设计需要考虑到系统的功能需求、资源限制、可靠性、实时性等因素。
本文将介绍嵌入式系统体系结构的几个重要概念和设计原则。
一、嵌入式系统体系结构的概念1.处理器体系结构:嵌入式系统的处理器体系结构决定了系统的性能和功耗特性。
常见的处理器体系结构包括单核处理器、多核处理器、多处理器系统等。
在选择处理器体系结构时,需要根据系统的性能需求和资源限制来确定。
2.操作系统体系结构:嵌入式系统的操作系统主要负责管理系统的资源和提供各种服务,如任务调度、内存管理、设备驱动等。
常见的操作系统体系结构包括单任务系统、多任务系统、实时操作系统等。
在选择操作系统体系结构时,需要根据系统的实时性需求和资源限制来确定。
3.硬件体系结构:嵌入式系统的硬件体系结构主要包括中央处理器、存储器、通信接口等。
在设计硬件体系结构时,需要考虑系统的性能需求、资源限制以及可扩展性等因素。
二、嵌入式系统体系结构的设计原则1.低功耗:嵌入式系统常常工作在电池供电或功耗限制的环境下,因此低功耗是嵌入式系统设计的重要考虑因素。
在处理器体系结构的设计上,可以采用节能技术如动态电压调节、频率调节等来降低功耗;在软件设计上,可以采用功耗管理技术如功耗分级、功耗优化等来降低功耗。
2.实时性:嵌入式系统常常需要满足实时性需求,即对任务的响应时间有严格的要求。
在操作系统体系结构的设计上,可以采用实时调度算法如最早截止时间优先(EDF)、最短剩余时间优先(SRT)等来保证任务的实时性。
3.可靠性:嵌入式系统往往工作在恶劣的环境下,对系统的可靠性要求较高。
在硬件体系结构的设计上,可以采用冗余技术如备份处理器、备份存储器等来增强系统的可靠性;在软件设计上,可以采用容错技术如软件重启、错误检测与纠正等来提高系统的可靠性。
4.简洁性:嵌入式系统的资源有限,因此在系统的设计上要追求简洁和高效。
【论文】太阳能发电随动系统设计
摘 要太阳能是一种清洁无污染的能源,取之不尽,用之不竭,其广阔的发展前景使得太阳能发电成为一个全球瞩目的、具有深远意义的研究课题。
在中国,太阳能资源非常宝贵,从其分布来看,西部地区的太阳能年辐射总量很高。
因此,开发好太阳能,对中国的西部开发有着重要的现实意义。
太阳能的利用,有利于世界保护,因此如何更进一步地提高太阳能光伏发电装置的效率,无论是从科技应用的角度,还是从商业开发的角度讲都是目前亟待解决的课题。
然而,太阳能强度和方向不确定性及光照间歇性等特点,给太阳能的收集带来了一定难度。
传统的固定式太阳能采集系统没有充分利用太阳的能量,吸收效率相对较低。
因此,本文通过嵌入式太阳位置自动追踪技术的研究,对提高太阳能的吸收效率,高效、合理地利用太阳能具有重要的研究价值。
关键词 太阳, 自动追光系统, 系统设计, 控制, ARMIAbstractSolar power energy is a kind of clean, pollution-free useless energy. Its development prospects are bright. Using solar energy to generate electronic power has already been a meaningful topic which is concerned by people around the world. The solar energy resource is plentiful in our country. And according to the distribution of solar energy resource, the amount of the solar radiation in the western region is more than the other areas. So, making good use of the solar energy will promote the Western Development Project in the future. The applications of solar energy will benefit the environmental protection. Therefore, how to further promote the efficiency of solar photovoltaic devices has become an urgent issue at present from the perspective of commercial development as well as the view of technological applications. However, the solar energy has its own features, such as intermittent, uncertainly direction and uncertainly light intensity. So, it takes us some difficulties to receive the solar energy. Some fixed solar collection systems can`t receive the light energy as much as possible. Their efficiency that the sun cells boards receive the sun light is comparatively low. Therefore, it is necessary to make the sun cell boards track the sun, when we use solar energy.Key words: sun, automatically make track for light system, system design, control, ARMII目 录第一章 绪论 (1)1.1 太阳能利用现状与趋势 (1)1.2 太阳能随动(追踪)技术国内外发展现状 (5)1.2.1 光电追踪 (5)1.2.2 视日运动轨迹追踪 (6)1.3 嵌入式系统的发展 (8)1.3.1 嵌入式发展的历史与现状 (8)1.3.2嵌入式系统的体系结构 (10)1.4 论文的主要工作和总体结构 (13)第二章 太阳追光系统的方案选择和总体设计 (14)2.1 传感部分传感器布置相关方案选择 (14)2.1.1 基于凸透镜的传感部分方案 (14)2.1.2 基于挡板的传感部分方案 (14)2.1.3 传感部分方案的比较和选择 (15)2.2 调整机构的设计 (16)2.2.1 调整机构的设计计算与零件选型 (16)2.2.2 调整机构实体结构 (20)2.3 太阳能随动(追光)系统的总体设计 (23)2.3.1 计算太阳高度角的原理 (24)2.3.2 计算日出日落时间的原理 (27)2.4本章小结 (28)第三章 嵌入式系统的硬件设计 (29)3.1 系统硬件设计的总体选择方案 (29)3.2嵌入式处理器模块设计 (30)3.2.1 Samsung S3C44BOX (30)3.3键盘模块的设计 (30)3.4显示模块的设计 (32)3.5感光模块的设计 (34)3.6 传动模块的设计 (35)III3.7系统存储器设计 (36)3.8硬件调试接口 (36)3.8.1串口调试接口 (36)3.8.2 JTAG调试接口 (37)3.9 本章小节 (37)第四章 嵌入式系统的软件设计 (38)4.1 系统总体的功能和设计方案 (38)4.2 系统的初始化 (39)4.3 中断程序模块 (41)4.4键盘模块程序设计 (42)4.4.1 4×4键盘的扫描原理及程序设计 (43)4.4.2 通过键盘获取一个字符串 (43)4.4.3 把字符串转型为整型数 (43)4.4.4 系统功能键的设计 (44)4.5 显示模块的程序设计 (44)4.6 太阳运动轨迹追光模式 (44)4.7 光电检测追光模式 (45)4.8本章小节 (46)4.9 结论 (46)第五章 经济技术分析报告 (48)第六章 结论与展望 (49)5.1 总结 (49)5.2 展望 (49)参考文献 (51)致 谢 (54)声 明 (55)IV第一章 绪论能源是人类经济发展的重要支柱,历史上煤炭和石油的现状及利用都极大地推动了经济的快速发展。
描述嵌入式系统的几个组成部分的层次结构
描述嵌入式系统的几个组成部分的层次结构描述嵌入式系统的几个组成部分的层次结构,并总结她们与开发过程的关系。
_百度知道底层(硬件层):需要您自己对于硬件相当的了解,能够独立绘制PCB 并进行焊接,之后调试板子,做好电路板。
比如sc2410,您需要绘制至少四层PCB电路板,其中ARM核心板就是最难掌握的部分,外围电路要注意各种走线技巧等等。
绘制完PCB 之后就需要您的焊接功夫。
将元器件焊接在PCB上。
最后调试电路板,这就是这一层设计中的收尾工作,也就是最具有挑战性的工作。
调试电路需要大量的经验,对于初学者来说,需要很强的电路知识,对于硬件的性能以及应用要非常了解才行。
中间层(驱动层):电路板已经有现成的。
您需要编程使一个死的板子,活起来,就就是把程序下载进去,能叫板子跑起来。
这里需要您对于ARM芯片的结构有很好的掌握,要会读芯片资料(datasheet)通常都就是英文的。
了解其内部资源我们就可以进行驱动编程了。
我们平时所使用单片机,一般都就是写好的程序,各个管脚在什么时序下输出什么信号(1或0),来操作实现相应借口的外围设备,比如液晶屏、LED灯等。
单片机也可以叫做简单的嵌入式。
原理相同。
ARM也可以向单片机一样使用,但我们更多的就是要对ARM加入操作系统的,这才就是我们最常说的嵌入式。
加入操作系统了以后,芯片对于个个资源的调度有了更系统的统筹规划,可以更充分的利用ARM芯片的系统资源,提高性能,使资源合理分配。
而通常的驱动就是在操作系统下工作的。
比如基于LINUX或WINCE等等下的驱动程序。
驱动程序就是链接硬件平台与操作系统的纽带,当然编写驱动要同时兼顾操作系统特点与硬件接口的特点。
做驱动的开发,需要对于软硬件都要有所了解,其中更偏重操作系统的理解。
这部分工作也就是最难做的。
上层(应用层):应用层,即我们所说的软件编程了。
就相我们手机里QQ与飞信一样,我们需要根据我们手机的操作系统来编写应用程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中断状态寄存器(IPSR)
中断状态寄存器(IPSR)包含当前激活的异常 的ISR编号。 IPSR的位分配
31 ---保留 ISR NUMBER 基础级别 =0 Reset =1 NMI =2 SVCall =11 ...... 9 8 -中断号 0
执行状态寄存器(EPSR) 为什么需要执行状态寄存器EPSR?
CM3处理器内核是ARMv7-M体系结构:
1. CPU中央处理器(32位)
2. 先进的系统外设
3. 中断控制 4. 内存保护 5. 系统调试与跟踪功能 6. 传统Thumb和新型Thumb2指令译码器 7. 特殊功能寄存器
STM32F103 系列内部框图
2.2 处理器工作模式和状态
不同的应用会有不同的模式
1、应用程序PSR(APSR)
2、中断状态PSR(IPSR)
3、执行状态PSR(EPSR)
通过MRS/MSR指令,这三个PSRs可单向访问,
也可组合访问。
使用三合一访问时的名称为xPSR或PSR。
寄存器位域名称
APSR各位定义
1、应用状态寄存器(APSR)包含条件代码标志。 2、在进入异常之前,Cortex-M3处理器将 APSR中的条件代码标志保存在堆栈内(硬件 压栈)。 3、访问APSR可以使用MSR(2)和MRS(2)指令 来。
支持2种模式和2种访问
1. 工作模式与访问权限的关系
Handler
私有模式
私有模式
非私模式 Thread
特权访问和用户访问
2. 特权访问和用户访问之间的相互转换
复位 线程模式 特权访问 CONTROL[0] = [0]=1 线程模式 用户访问
MSR指令置位 CONTROL[0]=1
Cortex-M3 与ARM7 的性能比较
Cortex-M3的寄存器集
13个通用寄存器:r0~r12 分组的堆栈指针r13,别名为SP_process 和SP_main 链接寄存器r14 程序计数器r15 1个程序状态寄存器xPSR
Cortex-M3的寄存器集
第2章ARMCortex-M3体系结构
Cortex-M3 内核的主要特点
功耗低-2uw 内核的门数少,具有优异的性价比 中断延迟短 调试成本低 具有嵌套向量中断控制器(NVIC) 处理器采用ARMv7-M 架构 具有可裁减的存储器保护单元(MPU) 总线接口
2.1 ARM Cortex-M3 处理器内核
Thumb状态。
为方便程序移植,CM3需要允许LR的LSB位可读
/可写。
程序计数器R15(PC)
CM3内部使用了三级指令流水线,读PC时返回
值是当前指令的地址+4 若向PC写入一个数据,就会引起程序分支 CM3中的指令时半字节对齐的,所以PC得最低 有效位总是读回0.
程序状态寄存器
内部分为三个子状态寄存器:
不同的模式解决不同的问题
模式代表解决特定的应用或某类问题的解 决方案(手机有正常模式和飞行模式)。 CM3的模式用于区别: (1)普通应用程序的代码与异常 (2)中断服务例程的代码
CM3的操作模式
CM3具有存储器访问的保护机制,它使得 普通用户程序代码不能意外地或恶意地 执行涉及要害的操作。支持线程和处理 者操作模式。(程序类型)
LDM、STM和If-then指令,为多周期指令,如果在 执行以上多周期指令时发生异常,处理器会暂时停 止以上指令的操作,进入异常,这时需要保护现场。
异常程序
LDM指令 异常 STEP1 STEP2 STEP3 STEP4
执行状态寄存器PSR(EPSR)包含两个重叠的区域 : 可中断-可继续指令(ICI)区 多寄存器加载(LDM)和存储(STM)操作是可中 断的。EPSR的ICI区用来保存从产生中断的点继续 执行多寄存器加载和存储操作时所必需的信息。 If-then状态区 EPSR的IT区包含了If-Then指令的执行状态位。
堆栈指针寄存器r13
链接寄存器(LR)r14
程序计数器寄存器r15
堆栈指针R13
CM3支持2个堆栈,都指向R13 主堆栈MSP:默认堆栈指针,系统内核、异常、 特权访问时使用。 进程堆栈PSP:可在线程模式使用
处理模式
处理器模式
始终使用MSP
复位
线程模式 主堆栈
产生异常
处理模式 主堆栈
EXC_RETURN[3:0] = 0b1001
CM3的操作模式
处理器2种操作模式:
处理模式和线程模式
程序执行设置2种权限:
用户级和特权级。
特权级可以访问任意资源,用户级对有些资源的访问有限制或不允许访问。
操作模式状态转换
1、CM3运行主应用程序时(线程模式),可使用特权级或用户级
2、处理异常服务例程必须使用特权模式。
3、复位后,CM3默认进入线程模式,特权级访问 4、从特权模式切换到用户级,修改CONTROL寄存器即可 5、用户级切换回特权级,必须执行一条系统调用指令SVC,触发 SVC异常,在异常服务例程中修改CONTROL才能回到特权级
r0 r1 r2 r3 低寄存器 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13(SP) r13(SP) r14(LR) r15(PC) xPSR
高寄存器
CM3采用双堆栈结构
SP_process SP_main
程序状态寄存器
通用寄存器
低组寄存器r0-r7
高组寄存器r8-r12
可用MSP 线程模式 也可用PSP
异 常 退 出 EXC_RETURN[3:0] = 0b1101 线程模式 线程堆栈
产生 异常
链接寄存器R14(LR)
LR用于在调用子程序时存储返回地址,也用于
异常返回。 PC的最低位LSB始终为0,但LR的LSB可读/写。 在这之前,由LR的第0位来指示ARM/Thumb状 态,因为有些ARM芯片同时支持ARM状态和
APSR的位分配
31 30 29 28 27 26 ---0
N
Z
C
V
Q
保留 置顶饱和标志:
(sticky saturation)标志 , 某变量值达到上限/下限时被置1
溢出标志:1:溢出
0:没有溢出 0:没有进位或借 位
进位/借位标志: 1:进位或借位 零标志:1:结果为0
0:结果为非0
负数或小于标志: 1:结果为负数或小于