史密斯预估控制在大滞后过程控制系统中应用论文
MATLAB预测控制的锅炉温度史密斯预估器的改进

公司搞笑三句半台词1.各位同事晚上好,欢迎大家都来到,不管说得好不好,别跑!(小张做跑状,柏将其抓回)2.心情开朗事事好,出门就有财神到,中了彩票开礼包,我靠,香皂!(刘准备香皂,江表演)3.上来说段三句半,大事小事胡乱侃,如有雷同你别喊,谁敢!(集体向观众做指责状)4.今年公司形势好,代理项目真不少,全国各地到处搞,真能搞!(集体摆出造型)5.北京先把地方占,天津来个游击战,南昌起义把钱赚,不赚白不赚!6.领导体贴又周到,卢总亲自送调料,送完花生榨菜到,挺帅!(阿蒙扮演卢总,与诸位握手,发榨菜)7.秦总嗓大又搞笑,吃饭不忘放大炮,战略工作少不了,挺好!(集体伸出大拇指做夸奖状)8.销售工作不怕难,帅哥美女齐把关,各个出手不一般,签单!9.市场调研很重要,跑到脚上起了泡,顺便能把媳妇找,赚到!(占军准备结婚证,做动作)10.策划工作事不少,头脑风暴天天搞,管了围墙管广告,晕倒!(全体晕倒状)11.行政工作很琐碎,挺着肚子无所谓,每份付出都珍贵,哇赛!(江做孕妇状)12.财务部门重头炮,整天盯着数字跑,万一工作出了错,检讨!(众人指责,小师妹哭)13.今晚大家来聚会,喝酒千杯不怕醉,管他明年累不累,喝完就睡!(江、胖子做睡状)14.为了今晚联欢会,兄弟姐妹齐准备,精彩节目排着队,撤退(集体向右转,跑步、喊口号撤退)公司晚会搞笑节目《三句半》1、锣鼓叮咚敲起来,喜迎新春乐开怀,我们四人台上站,说段三句半2、各位来宾上午好,我给大家拜年了,不管说得好不好,别跑!3、今年公司形势好,签的合同真不少,全年任务提前完,赚钱4、一靠国家政策好,建设项目真不少,全国处处基建搞,很好5、二靠各位业务员,不辞劳苦作宣传,某某公司人人知,有名了6、尽管市场有困难,业务人员是猛男,为销产品招用尽,签单7、英雄首推某某某,人精腿快脑子灵,全年完成三佰万,模范8、其实某某也不差,就是没敢说实话,大家知道为了啥,怕太太问提成干了啥9、公司人人不简单,夜以继日把活干,这般辛苦为哪般,挣钱11、生产部,很辛苦,加班加点经常有,二天的活一天干,没人怨12、质量检验没麻达,优质产品天天发,楼上楼下忙着跑,真好13、财务部,不简单,开源节流严把关,今年增收多少万,不能说14、行政管理事不少,福利调动评功劳,一切都为公司好,别累倒15、后勤供应很琐碎,您可别说无所谓,每份付出都珍贵,不说累16、售后服务辛苦了,常年在外把家抛,里里外外妻子干,心别变17、公司上下协作好,民主决策勤思考,不靠蛮干靠动脑,搞好18、各位股东你们好,抽出时间多指导,心中感激如江涛,步步高19、在座各位听我言,真情祝福涌心田,生活美好比蜜甜,多发压岁钱20、各位先生事事顺,出门就交发财运,中了礼包中奖票,别是香皂21、各位女士身体好,苗条美丽像块宝,爱情甜蜜老公好,撒娇22、明年公司有巨变,改革创新要实现,三星明天更灿烂,靠干23、年终奖金人一万,外加茅台三箱半,这个经理我来干,不算24、今天大家来聚会,洗净一年苦与累,憧憬明天心儿醉,信心百倍25、为了今天联欢会,全体员工齐准备,精彩节目排着队,咱撤退。
时变大时滞系统的控制方法综述
时变大时滞系统的控制方法综述1 引言在化工、炼油、冶金、玻璃等一些复杂的工业过程当中,广泛地存在着大时滞现象。
由于时滞的存在,使得被控量不能及时地反映系统所承受的扰动,从而产生明显的超调,使得控制系统的稳定性变差,调节时间延长,对系统的设计和控制增加了很大的困难。
而时变时滞的特性则使得问题更加复杂,因而对此类问题的研究具有重要的理论和实际意义。
自从1957年Smith首次提出针对时滞系统的预估控制方法以来,许多学者在这一领域进行了广泛而深入的研究,相继提出了许多行之有效的控制方法。
根据对专统数学模型的依赖程度的不同,这些方法大致可以分为自适应控制和智能控制两大类。
本文即对此进行了总结介绍,分析了各种控制方法的优点及其所存在的局限性,并且探讨了该领域今后的发展方向。
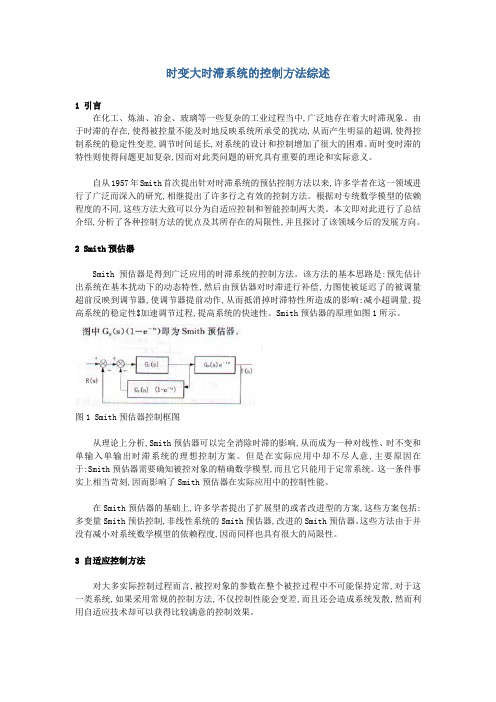
2 Smith预估器Smith预估器是得到广泛应用的时滞系统的控制方法。
该方法的基本思路是:预先估计出系统在基本扰动下的动态特性,然后由预估器对时滞进行补偿,力图使被延迟了的被调量超前反映到调节器,使调节器提前动作,从而抵消掉时滞特性所造成的影响:减小超调量,提高系统的稳定性$加速调节过程,提高系统的快速性。
Smith预估器的原理如图1所示。
图1 Smith预估器控制框图从理论上分析,Smith预估器可以完全消除时滞的影响,从而成为一种对线性、时不变和单输入单输出时滞系统的理想控制方案。
但是在实际应用中却不尽人意,主要原因在于:Smith预估器需要确知被控对象的精确数学模型,而且它只能用于定常系统。
这一条件事实上相当苛刻,因而影响了Smith预估器在实际应用中的控制性能。
在Smith预估器的基础上,许多学者提出了扩展型的或者改进型的方案,这些方案包括:多变量Smith预估控制,非线性系统的Smith预估器,改进的Smith预估器。
这些方法由于并没有减小对系统数学模型的依赖程度,因而同样也具有很大的局限性。
3 自适应控制方法对大多实际控制过程而言,被控对象的参数在整个被控过程中不可能保持定常,对于这一类系统,如果采用常规的控制方法,不仅控制性能会变差,而且还会造成系统发散,然而利用自适应技术却可以获得比较满意的控制效果。
改进Smith预估控制系统用于甲醛生产控制

o ess m ia oipe etdT edlypol a’ esle o pee yajsn avsteS i fh t s lm ne, h e rbe cn t o dcm ltyb d t gvle.h mt t ye s l m a m b v l ui h
peit ec n o i t na o t ed s no eajs e t oma eu o eln i ed l . t h rdci o t l s h d pe i t ei f h dut n t v r e dnh g t m k pfr h ogt ea A e t m y t
i g s se smu ai n n ; y t m i l t o
在 甲醛工业生产过程 中, 被控对象往往不同程度 地存在着纯迟延。当过程等效纯迟延时间 丁 与等效时 间常数 之 比大于 0 3时 , . 称该过程为具有大迟延的 工艺过程。这种过程在生产 中普遍存在 , 采用常规的 P 或 PD控制器难 以获得满意的控制性能 , 了维持 I I 为 系统的平稳 , 控制器的参 数必须远远低于其最佳整定
Sag a 2 12 , hn;3 oeeo ot c nea dE g er g Sa dn nvri ,ia 5 0 1C ia h h i 0 6 0 C ia .C l g f nml i c n ni e n, h nogU i s t J n 20 6 , hn) n l C Se n i e y n
M a u a t rn n r lo r l e y e n f c u i g Co to fFo ma d h d
GAO Ln ln HAO a g rn DI i—o g , Ku n —o g , NG n —h n Yo gs e g ’ S n —u L U Ho g p , HIHo g r i, I n — o
Fuzzy自调整PID的Smith预估主汽温控制系统
Fuzzy自调整PI D的Sm i t h预估主汽温控制系统产品与应用王斌1李鹏2(1.河北省电力研究院,石家庄050021;2.河北兴泰发电有限公司,河北邢台054000)摘要针对火电厂锅炉主汽温系统的大滞后、大惯性,非线性等特点,设计了Fuz zy自调整P I D 参数的Sm i t h预估主汽温控制系统。
运用M a t l ab对系统在多种工况下进行了仿真,结果表明所设计的控制系统在控制品质,鲁棒性方面明显优于常规的Sm i t h预估控制系统。
关键词:主汽温系统;Fuzz y自调整PI D;模型不确定性;参数自整定;仿真M ai n St r eam T em per at ur e C ont r ol Sys t em s B as ed on Fuzzy Sel f-t uni ngPI D Sm i t h C ont r ol l er sW ang B i n7L i Pen92(1.H ebei E l ect r i c P ow e r R es ear ch Inst i t ut e,Shi j i azhuang050021;2.H e be i X i ngt ai P ow e r C o.,L t d.,X i ngt a i,H ebe i054000)A bs t r act I n or d er t O ove r co m e t he l a r ge del ay、t he gr ea t l ner t i a and nonl i ne ar of t he m ai n s t r eamt em per at u r e obj ect i n f oss i l f i r ed pow e r st a t i on,a c ont r ol s ys t em bas ed on Fuz zy Sel f-t uni ng P I D Sm i t hC ont r ol l er i s pr opos ed.T hr ough s i m ul at i on i n var i ous si t uat i ons us i ng M a t l ab,i t s ho w s t ha t t he cont rolqual i t y and r obust ness of t hi s c ont r ol s ys t em appar ent l y ar e s upe ri or t o gener al Sm i t h pre di c t i on c ont r ol sys t em.K ey w or ds=m a i l s t ream t em per at u r e s yst em;s el f-t uni ng PI D by f uz zy;m od el uncer t ai nt y;param et er s s el f-t uni ng;s i m ul at i on1引言结果表明,该控制器能达到较为满意的控制效果。
时滞系统的控制方法研究
图1-4对象调节通道含有纯滞后的闭环系统
同理可以得到:
C(s)一 G。(s)G。(5)e1 R(s) 1+G。(s)G。(s)日0弦一
∽ 即D
C(引一
G。(s)
三(s) 1+Gc(J)G。(s)Ⅳ(s)P1
∽扣动
它们的特征方程式都可以表示为:
l+Gc(s)G。(5)日(5)P一=0
(1-2—6)
3.反馈通道有纯滞后
此外若仅反馈通道中测量元件H(s)具有纯滞后, 此时闭环传递函数为:
皇盟: 鱼!!狂盟
R(5) 1+G。(5)G0(s)H(s)e1
(卜2—7)
C(s)
G。(s)
L(s) l+G。O)G。(s)日(s弦1
(1-2—8)
其特征方程式的形式与式(1-2—6)相同。
后和控制存在滞后的时滞系统的变结构控制。仿真研究均说明了所设计的模糊自
适应控制算法和变结构控制算法的有效性。最后论文讨论了电厂锅炉过热汽温的 模糊控制系统,并设计了其硬件电路实现图。
关键词: 纯滞后 模糊控制 变结构控制 锅炉
塑更查兰堡主兰堡笙茎
Abstraet
Time-delay system is the important field for the application ofthe control theory.
In this paper,intelligent control and variable structure control for time-delay system is
introduced in order to increase the robustness ofthe general time—delay control system.
基于MATLAB的大延迟系统的PID控制与Smith预估器控制的仿真分析

基于MATLAB的大延迟系统的PID控制与Smith预估器控制的仿真分析俞倩兰【摘要】介绍了PID控制与Smith预估器的原理及特点,仿真实例验证了Smith 预估器对大延迟系统的有效控制作用.【期刊名称】《常熟理工学院学报》【年(卷),期】2006(020)006【总页数】3页(P67-69)【关键词】大延迟系统;PID控制;Smith预估器【作者】俞倩兰【作者单位】常熟理工学院,信息与控制工程系,江苏,常熟,215500【正文语种】中文【中图分类】TP2在过程控制中,当过程的纯延迟时间τ与其动态时间常数T满足τ/T≥0.3时,则为大延迟系统。
具有大延迟工艺过程的自动控制是过程控制中最棘手的问题之一,很难控制。
当τ/T增大,控制过程中的相位滞后也增大,使得被控量不能及时反映系统所遇到或承受的扰动,即使检测信号到达调节器使之动作,也需要经延迟时间τ后,才会改变被控量使系统得到控制。
于是,系统控制过程必然会经过较长的调节时间并产生明显的超调。
带延迟特性过程控制的难度随着延迟时间τ的增大而加大,大延迟控制系统一直都是控制界特别关注的课题。
虽然科学工作者花了大量心血,但收效甚微。
本文仅对大延迟控制系统的一般PID控制与Smith预估器控制进行MATLAB仿真分析。
PID控制器在工业过程控制中有着非常广泛的应用。
在图1所示的单位反馈控制系统中,PID控制器产生控制信号:u(t)=KP e(t)+KIe(τ)dτ+KD,式中e(t)为误差信号,KP为比例增益,KI 为积分增益,KD为微分增益。
对该式进行拉普拉斯变换后得到PID控制器的传递函数为:Gc(s)==KP++KDS,参数KP ,KI ,KD对图1所示的闭环系统的作用见表1。
Smith预估器控制的基本思路是:预先估计出过程在基本扰动下的动态特性,然后由预估器进行补偿控制,力图使被延迟了τ的被调量提前反映到调节器,并使之动作,以此来减小超调量与加速调节过程。
Smith预估器控制设计
Smith预估器控制设计《计算机控制》课程设计报告题⽬: Smith预估器控制设计姓名: 学号:姓名: 学号:姓名: 学号:2010年12⽉3⽇《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2010年7 ⽉5 ⽇Smith 预估器控制设计⼀.实验⽬的被控对象为ses G s+=-110)(1.0,画出系统框图,设计Smith 数字预估器。
三.控制系统仿真 1.⽅案设计已知纯滞后负反馈控制系统,其中其中D(s)为调节器传递函数,ses G s+=-110)(1.0为对象传递函数,其中G 0(s)e -0.1s包含纯滞后特性,纯滞后时间常数τ=0.1。
系统的特征⽅程为:0.1101()()1()01seD s G s D s s-+=+=+由于闭环特征⽅程中含有0.1se -项,产⽣纯滞后现象,有超调或震荡,使系统的稳定性降低,甚⾄使系统不稳定。
为了改善系统特性,引⼊Smith 预估器,使得闭环系统的特征⽅程中不含有0.1se-项。
Smith 纯滞后补偿的计算机控制系统为:上图所⽰Z O H 为零阶保持器,传递函数:1()Tsh e G s s--=并且有:lT τ=(l 为⼤于1的整数,T 为采样周期)。
2.采样周期T 的选择采样周期在计算机控制中是⼀个重要的参数。
从信号保真度看,采样周期不宜太长,即采样频率不应该过低。
Shannon 采样定理给出了下限⾓频率ωs ≧2ωmax ,ωmax 为原信号的最⾼频率;采样周期应尽可能的短,以使采样后的离散信号可以近似于连续信号,数字控制具有接近于连续控制系统的质量。
但采样频率过⾼,将使得数据存数容量加⼤,计算⼯作量加⼤,并且采样频率⾼到⼀定程度,对系统性能的改善效果并不显著。
所以,我们要找到⼀个最佳的采样周期。
纯滞后较⼤不可忽略时,可选择T 在/10τ附近,当纯滞后占主导地位时,可选择T 约为τ,再加上参考课本上表3.4扩充响应曲线法选择数字PID 参数计算公式,预选了l =2,3,5,10。
基于模糊Smith控制的时滞系统设计与仿真
基于模糊Smith控制的时滞系统设计与仿真摘要今天的工业生产在面对日益复杂的控制问题伴随着科技的进步状态,时间延迟,但是,很难避免工业控制的内在特征, 它不仅降低了系统的稳定性,也严重影响工业生产过程的质量控制,模糊控制作为一种基于模型参数的控制方法的研究成为了一个热点。
MATLAB在本文中结合了模糊控制和Smith控制,即模糊—Smith控制,不仅补偿滞后的缺点,也较强的适应控制对象的参数变化,具有一定的实际应用前景。
大时滞工业生产过程中经常运用于冶金、炼油、化工、电力、航空航天和经济管理中,还在大时滞工业过程估计控制系统以传统的史密斯为主, Smith预测控制是延时控制最有效的控制方法,它不仅克服控制系统中的各类缺陷,也可以使模糊控制和Smith预估器相结合,对于模糊控制应用于纯时滞系统在某种程度上是更成功的。
关键词:模糊控制; Smith控制; 时滞系统; MATLAB。
Based on the fuzzy - Smith control design and simulation oftime-delay systemsAbstractIn today's industrial production in the face of increasingly complex control problems along with the progress of science and technology condition, time delay, but it is hard to avoid the inherent characteristics of the industrial control, it not only reduces the system's stability andserious influence the industrial process control 's quality , fuzzy control, as a kind of control method based on model parameters become a hot spot of research. MATLAB in this paper combines fuzzy control and control become blurred - Smith. Smith control, not only compensate the disadvantage of lag, and to adapt to changes in the parameters of the controlled object, has a certain practical application prospect. Large time delay is often used in the process of industrial chemical, oil refining, metallurgy, electric power, aerospace, economic management and traffic system. Also in large industrial processes with time-delay estimation control system is given priority to with the traditional Smith, Smith predictive control is the most classical and most mature time delay control method, it not only make the set value input zero steady-state error and external disturbance, also can be combined with fuzzy control and Smith estimatesKey words: Fuzzy Control; Matlab; Delays; Smith control 目录摘要ⅠAbstract Ⅱ目录Ⅲ1引言11.1选题的背景及意义12绪论22.1 研究的内容及方法22.2研究的可行性22.3研究的目标及意义43模糊-Smith控制43.1时滞53.2模糊控制53.3 Smith控制63.4史密斯(Smith)预估器73.5模糊-Smith控制94 MATLAB软件仿真134.1 MATLAB与其特点134.2模糊-Smith控制的MATLAB仿真134.3仿真结果分析185结论19参考文献19致谢201引言1.1选题的背景及意义对于今天的工业生产在面对日益复杂的控制问题伴随着科技的进步状态,时间延迟,但是,很难避免工业控制的内在特征, 它不仅降低了系统的稳定性,也严重影响工业生产过程的质量控制,模糊控制作为一种基于模型参数的控制方法的研究成为了一个热点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
史密斯预估控制在大滞后过程控制系统中的应用摘要:本文简单分析了大滞后过程控制系统难于控制的主要原因,从而引出史密斯预估控制的基本思想及实现过程,并给出了一个实例进行仿真说明。
关键词:大滞后过程控制系统史密斯预估控制仿真实例
1 大滞后过程控制系统概述
在工业生产过程中,被控过程除了具有容积滞后外,还存在不同程度的纯滞后。
例如在工业生产中的乳化物干燥过程中,进入干燥器干燥乳液所用的热蒸汽需要经过换热器的热交换,才能改变空气温度。
由于换热器的时间常数较大,导致存在纯滞后。
此外,如化学反应、管道混合、皮带传送、轧辊传输、多个容器串联以及用分析仪表测量流体的成分等都存在不同程度的纯滞后。
1.1 难于控制的原因
在大多数被控过程的动态特性中,既包含纯滞后τ,又包含惯性常数t,通常用τ/t的比值来衡量被控过程纯滞后的严重程度。
若τ/t<0.3,则称为一般滞后过程;若τ/t>0.3,则称之为大滞后过程。
大滞后过程被公认为较难控制的过程。
难于控制的主要原因分析如下:
①由测量信号提供不及时而产生的纯滞后,会导致调节器发出的调节作用不及时,影响调节质量。
②由控制介质的传输而产生的纯滞后,会导致执行器的调节动作不能及时影响调节效果。
③纯滞后的存在使系统的开环相频特性的相角滞后随频率的增大而增大,从而使开环频率特性的中频段与(-1,j0)点的距离减小,结果导致闭环系统的稳定裕度下降。
若要保证其稳定裕度不变,只能减小调节器的放大系数,同样导致调节质量的下降。
2史密斯预估控制
史密斯预估控制的基本思想是预先估计出被控过程的动态模型,然后设计一个预估控制器对其进行补偿,使滞后了τ时间的被控量提前反馈到调节器的输入端,使调节器提前动作,以减小超调和加速调节过程。
其控制系统框图如图1所示。
图1中,g0(s)是被控过程无纯滞后环节е-τs的传递函数;gs(s)是史密斯预估器的传递函数。
假设没有此预估器,则由调节器输出u(s)到被控量y(s)之间的传递函数为
y(s)/u(s)= g0(s)е-τs (2-1)
式(2-1)表明,受到调节器作用的被控量要经过纯滞后时间τ之后才能反馈到调节器的输入端,这就导致调节作用不及时。
此外,系统的闭环传递函数为
y(s)/x(s)=[gc(s)g0(s)е-τs]/[1+gc(s)g0(s)е-τs]
(2-2)
由式(2-2)可见,闭环特征方程式中含有е-τs项,这会对系统的稳定性产生不利影响。
当采用史密斯预估器gs(s)以后,调节量u(s)与反馈到调节器输入端的信号y′(s)之间的传递函数则为y′(s)/u(s)=g0(s)е-τs+gs(s) (2-3)
为使调节器接收的反馈信号y′(s)与调节量u(s)不存在纯滞后时间τ,则要求式(2-3)为 y′(s)/u(s)=g0(s)е-τ
s+gs(s)=g0(s)由此可得预估器gs(s)的传递函数为
gs(s)=g0(s)(1-е-τs) (2-4)
式(2-4)表示的预估控器称为史密斯预估器。
史密斯预估控制系统的实施框图如图2所示。
由图2导出系统的闭环传递函数为
y(s)/x(s)=[gc(s)g0(s)е-τs]/[1+gc(s)g0(s)](2-5)
由式(2-5)可见,史密斯预估控制的闭环特征方程中已没有е-τs项。
也就是说该系统与原来相比以消除了纯滞后对系统稳定性的影响。
3仿真实例
对一阶惯性加纯滞后的过程控制系统,分别进行单回路控制和史密斯预估控制。
设过程参数k0=2,τ=4,t0=4,当调节器参数kc=20,t1=1时,系统在设定值干扰[设x=10×1(t)]下的输出仿真曲线如图3所示。
其中实线是史密斯预估控制的仿真曲线,其超调量小于10%,调节时间约为8s,与单回路控制(图中虚线所示)相比,控制效果有明显改善。
4 结束语
从史密斯预估控制的原理可知,预估器模型完全取决于被控过程的特性。
如果被控过程的特性不能精确得到,则难以获得预期的控制效果。
参考文献:
[1]施仁.自动化仪表与过程控制[m].电子工业出版社,2003.
[2]俞金寿.过程自动化及仪表[m].化学工业出版社,2003.
[3]何离庆.过程控制系统与装置[m].重庆大学出版社,2003.
[4]苏迪前.预测控制系统及其应用[m].机械工业出版社,1996.
[5]潘永湘,杨延析,赵跃.过程控制与自动化仪表[m].机械工业出版社,2007.。