测试实验二 测试系统动态特性校准
测试系统的动态特性
y(t)=A0x(t)
y(t)=A0x(t- t0)
时域条件
y(t)=A0x(t-t0) Y(ω)=A0e-jωt0X(ω)
不失真测试系统条件的幅频特性和相频特性应分别满足 : A(ω)=A0=常数 φ(ω)=-t0.ω
做傅立叶变换
频域定义
A(ω)φ(ω) ω
一阶测试系统的典型输入下的响应,灵敏度为1 在单位阶跃输入下的响应 单位阶跃输入的定义为
一阶测试系统的典型输入下的响应,灵敏度为1 在单位正弦输入下的响应 设系统的输入为
THANKS
感谢观看
(四) 测试系统动态特性的测定 常用的动态标定方法有阶跃响应法和频率响应法。 阶跃响应法是以阶跃信号作为测试系统的输入,通过对系统输出响应的测试,从中计算出系统的动态特性参数。这种方法实质上是一种瞬态响应法,即通过对输出响应的过渡过程来标定系统的动态特性。 1.一阶系统动态特性参数的求取
漂移:是指测试系统在输入不变的条件下,输出随时间而变化的趋势 。
第3章、测试系统特性
测试系统的动态特性是指输入量随时间变化时,其输出随输入而变化的关系。
x(t)
h(t)
y(t)
输入量
系统特性
输出
(三)测试系统的动态特性
无论复杂度如何,把测量装置作为一个系统来看待。问题简化为处理输入量x(t)、系统传输特性h(t)和输出y(t)三者之间的关系。
相对真值:是指计量器具按精度不同分为若干等级,上一等级的指示值即为下一等级的指示值,次真值成为相对真值。
在一定条件下被测物理量客观存在的实际值,称为真值。真值是一个理想的概念。在实际测量时,由于实验方法和实验设备的不完善、周围环境的影响以及人们认识能力所限等因素,使得测量值与其真值之间不可避免地存在着差异。
基于动态校准数据的压杆测试系统动态特性校正技术
基于动态校准数据的压杆测试系统动态特性校正技术邹虹;胡永乐;邢园丁;朱宝良;张莹【摘要】针对应变式压杆测试系统在冲击波的超压测量中存在动态响应不足的问题,建立了激波管校准平台.采用系统辨识建模和动态补偿的方法,将时域分析和频域估计相结合,设计了一种动态补偿滤波器,改善了压杆测试系统的动态特性,使频带展宽,响应时间减少.%A shock-tube calibration platform was established to solve the insufficient dynamic response of a pressure bar test system in the shock wave measurement for chemical explosive experiments. The dynamic characteristics of the pressure bar test system was investigated by adopting the following methods such as system identification, dynamic compensation and the combination of time domain a-nalysis and frequency domain estimation. A new-type dynamic compensation filter was designed to improve the dynamic characteristics of the test system. And the compensation effect was tested. The results show that the frequency bandwidth of the test system is expanded and the response time is reduced.【期刊名称】《爆炸与冲击》【年(卷),期】2011(030)002【总页数】5页(P210-214)【关键词】爆炸力学;校准平台;动态补偿;压杆测试系统;系统辨识;冲击波【作者】邹虹;胡永乐;邢园丁;朱宝良;张莹【作者单位】西北核技术研究所,陕西西安 710024;西北核技术研究所,陕西西安710024;西北核技术研究所,陕西西安 710024;西北核技术研究所,陕西西安710024;西北核技术研究所,陕西西安 710024【正文语种】中文【中图分类】O384在冲击波的超压测试中,冲击波信号具有上升沿陡、超压峰值高、作用时间短等特点。
【自控原理实验】实验二 典型系统动态性能和稳定性分析

实验二典型系统动态性能和稳定性分析一.实验目的1.学习和掌握动态性能指标的测试方法。
2.研究典型系统参数对系统动态性能和稳定性的影响。
二.实验内容1.观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
2.观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三.实验步骤1.熟悉实验箱,利用实验箱上的模拟电路单元,参考本实验附录中的图2.1.1和图2.1.2,设计并连接由一个积分环节和一个惯性环节组成的二阶闭环系统的模拟电路(如用U9、U15、U11和U8连成)。
注意实验接线前必须对运放仔细调零(出厂已调好,无需调节)。
信号输出采用U3单元的O1、信号检测采用U3单元的I1、锁零接U3单元的G1。
2.利用实验设备观测该二阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
3.改变该二阶系统模拟电路的参数,观测参数对系统动态性能的影响。
4.利用实验箱上的模拟电路单元,参考本实验附录中的图2.2.1和图2.2.2,设计并连接由一个积分环节和两个惯性环节组成的三阶闭环系统的模拟电路(如用U9、U15、U11、U10和U8连成)。
5.利用实验设备观测该三阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
6.改变该三阶系统模拟电路的参数,观测参数对系统稳定性与动态指标的影响。
7.分析实验结果,完成实验报告。
软件界面上的操作步骤如下:①按通道接线情况:通过上位机界面中“通道选择”选择I1、I2路A/D通道作为被测环节的检测端口,选择D/A通道的O1(“测试信号1”)作为被测对象的信号发生端口.不同的通道,图形显示控件中波形的颜色将不同。
②硬件接线完毕后,检查USB口通讯连线和实验箱电源后,运行上位机软件程序,如果有问题请求指导教师帮助。
③进入实验模式后,先对显示模式进行设置:选择“X-t 模式”;选择“T/DIV ”为1s/1HZ 。
动态测试仪器的校准
• 测振仪器的校准分为两种方式,第 一种是分步校准法,第二种是系统 校准。
动态测试系统的校准
第一节 分步校准与 系统校准
• 分步校准法是把测振传感器、放大器 和记录设备放在全套仪器测量系统中 ,分别测定各段的灵敏度,然后把他 们组合起来,求得测振仪最初输入量 与最后输出量的关系。
动态测试系统的校准
把测量系统分成传感器与后续仪器两部分,分别加 以校准。在放大器中配有一个幅度恒定的校准电信号 ,称为“模拟传感器”,它可以随时用来检验和校准 放大器及记录仪器,在测量现场使用十分方便。
动态测试系统的校准
第二节 静态校准法
• 静态校准法用于校准具有零频率响应的 传感器及测量仪器,校准的项目有静态 灵敏度、线性度、测量范围等。
2)由于传感器横向灵敏度的方向性,在测量过程中必须用特制 转台把被测传感器绕其灵敏度轴转一系列角度值做重复测定, 最后得到各个方向的横向灵敏度。
3)测量的难度在于控制振动台面的横向运动在轴向运动的百分 数以下。
动态测试系统的校准
谢谢大家!
作线性度校准时,可使振动台频率不变,改变振幅 值,测出相应的输出量,绘制曲线,即可求出它们的 线性度曲线。
动态测试系统的校准
第四节 相对校准法
相对校准法的基本原理和方法
• 相对校准法是将两个传感器(或测振系 统)进行比较而确定被校准传感器(或 测试系统)性能的校准方法。两个传感 器中,一个作为被校准的传感器,称为 工作传感器;另一个作为参考基准的传 感器,称为参考传感器或标准传感器, 它是经过绝对校准法或高一级精度相对 校准法校准的。
当校准速度或加速度传感器时,调节振动台位移幅 值,使得振动速度或加速度为某一固定值,例如 v=1cm/s或a=9.8ms-2,测定此时传感器的输出量, 即可求出灵敏度。
测试系统动态特性

高效数据处理
采用高效的数据处理算法和架构,确保测试数据的准确性和实时性。
提高测试系统的稳定性
冗余设计
关键部件采用冗余设计,提高系统的可靠性和稳定性。
自适应调整
根据测试过程中的实际情况,自动调整系统的参数和性能, 确保测试结果的准确性。
故障诊断与恢复
具备故障诊断和恢复功能,能够在系统出现故障时快速定位 并恢复。
降低测试系统的噪声
噪声抑制技术
采用先进的噪声抑制技术,降低测试系统内部和外部噪声的影响。
滤波算法
应用合适的滤波算法对测试数据进行处理,去除噪声干扰,提高测 试结果的准确性。
环境控制
对测试环境进行严格的控制,减少环境因素对测试结果的干扰。
06 结论
研究成果总结
测试系统的动态特性对于确 保其稳定性和可靠性至关重
激振试验的优点在于可以人为控制激励信号的频率、幅值和波形等参数, 以便于对系统的不同动态特性进深入研究。
激振试验的局限性在于它只能模拟特定条件下的动态特性,无法完全模拟 实际运行中的复杂情况。
振动台试验
01
振动台试验是一种利用振动台 模拟实际运行中的振动环境, 对测试对象进行振动试验的方 法。
02
测试系统动态特性
目 录
• 引言 • 测试系统动态特性概述 • 测试系统动态特性分析方法 • 测试系统动态特性测试技术 • 测试系统动态特性优化与改进 • 结论
01 引言
目的和背景
确定测试系统的性能指标
通过对测试系统的动态特性进行评估,可以了解测试系统的性能指标,如响应时间、稳定性、可 靠性等。
动态特性对于故障诊断和预测具有重要意义
通过对测试系统的动态特性进行分析,可以及时发现系统潜在的问题和故障,并对其进行诊断和预测。 这对于预防故障发生、减少系统维护成本和提高系统可靠性具有重要意义。
实验二 典型系统动态性能和稳定性分析
实验二典型系统动态性能和稳定性分析一.实验目的1.学习和掌握动态性能指标的测试方法。
2.研究典型系统参数对系统动态性能和稳定性的影响。
二.实验内容1.观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
2.观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三.实验步骤1.熟悉实验装置,利用实验装置上的模拟电路单元,参考本实验附录中的图2.1.1和图2.1.2,设计并连接由一个积分环节和一个惯性环节组成的二阶闭环系统的模拟电路(如用U9、U15、U11和U8连成)。
注意实验接线前必须对运放仔细调零(出厂已调好,无需调节)。
信号输出采用U3单元的O1、信号检测采用U3单元的I1、运放的锁零接U3单元的G1。
2.利用实验设备观测该二阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
3.改变该二阶系统模拟电路的参数,观测参数对系统动态性能的影响。
4.利用实验装置上的模拟电路单元,参考本实验附录中的图2.2.1和图2.2.2,设计并连接由一个积分环节和两个惯性环节组成的三阶闭环系统的模拟电路(如用U9、U15、U11、U10和U8连成)。
5.利用实验设备观测该三阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
6.改变该三阶系统模拟电路的参数,观测参数对系统稳定性与动态指标的影响。
7.分析实验结果,完成实验报告。
软件界面上的操作步骤如下:①按通道接线情况:通过上位机界面中“通道选择”选择I1、I2路A/D通道作为被测环节的检测端口,选择D/A通道的O1(“测试信号1”)作为被测对象的信号发生端口.不同的通道,图形显示控件中波形的颜色将不同。
②硬件接线完毕后,检查USB口通讯连线和实验装置电源后,运行上位机软件程序,如果有问题请求指导教师帮助。
③进入实验模式后,先对显示模式进行设置:选择“X-t模式”;选择“T/DIV”为1s/1HZ。
自动控制原理 实验二 系统的动态性能与稳态研究
《自控原理实验报告》实验名称:实验二系统的动态性能与稳态研究实验数据记录与分析:所有输出信号均接入一反相器再输入至示波器CH2通道。
实验1:分析二阶系统的ζ和ωn对系统动态性能的影响经计算,实验一中二阶系统的闭环传递函数为G(s)=11+R1000kS+0.001S2实验一中调整时间选取的误差带为稳态值正负5%以内。
1.α=0此时将内反馈回路断开。
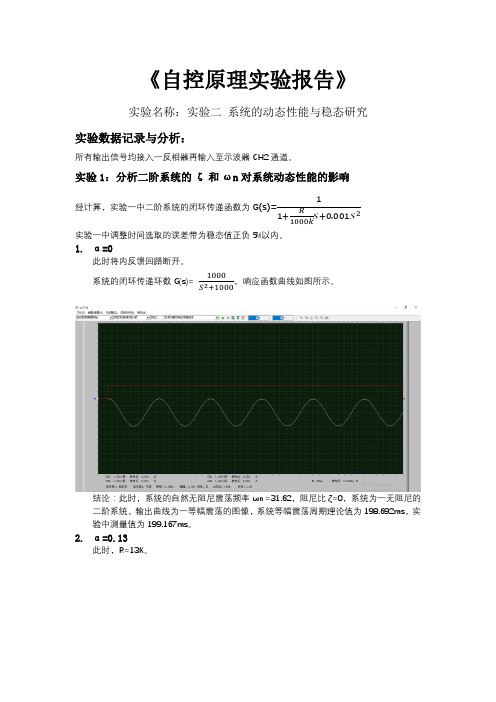
系统的闭环传递环数G(s)=1000S2+1000,响应函数曲线如图所示。
结论:此时,系统的自然无阻尼震荡频率ωn =31.62,阻尼比ζ=0,系统为一无阻尼的二阶系统,输出曲线为一等幅震荡的图像,系统等幅震荡周期理论值为198.692ms,实验中测量值为199.167ms。
2.α=0.13此时,R=13K。
系统的闭环传递环数G(s)=1000S2+13S+1000,响应函数曲线如图所示。
结论:此时,系统的自然无阻尼震荡频率ωn =31.62,阻尼比ζ=0.205,系统为一欠阻尼的二阶系统,输出曲线为一震荡后趋于平稳的图像。
理论上系统的输出曲线的超调量σ=51.79%,峰值时间为101.510ms,调节时间为462.812ms。
实验时系统的输出曲线的超调量σ=53.30%,峰值时间为101.667ms,调节时间为433.333ms。
3.α=0.33此时,R=33K。
系统的闭环传递环数G(s)=1000S2+33S+1000,响应函数曲线如图所示。
结论:此时,系统的自然无阻尼震荡频率ωn =31.62,阻尼比ζ=0.521,系统为一欠阻尼的二阶系统,输出曲线为一震荡后趋于平稳的图像。
理论上系统的输出曲线的超调量σ=14.69%,峰值时间为116.400ms,调节时间为182.105ms。
实验时系统的输出曲线的超调量σ=15.74%,峰值时间为115.000ms,调节时间为170.833ms。
4.α=0.44此时,R=44K。
系统的闭环传递环数G(s)=1000S2+44S+1000,响应函数曲线如图所示。
《机械测试技术2》课件-系统动静态特性测定

系统动静态特性测定系统动静态特性测定一、测试系统静态特性的测定二、测试系统动态特性的测定一、测试系统静态特性的测定(一)静态特性的测定一种特殊的测试,通过选择经过校准的标准静态量作为系统输入,求出其输入、输出特性曲线。
标准输入量的误差应当是所要求测试结果误差的1/3~1/5或更小。
xy A(二)标定过程1.作输入-输出特性曲线将标准量在满量程范围内均匀地等分成个n 输入点,按正反行程进行相同的m 次测量,得到2 m 条输入、输出特性曲线;%100}{max11AH H i =%100}{2max2AH H i =H2i各点重复性误差最⼤值H1代表正行程的重复性误差2.求重复性误差xy AH1i各点重复性误差最⼤值H2代表反行程的重复性误差)(1)(1122111∑∑====m j ijimj iji ymy ym y xy A3.求作正反行程的平均输入-输出曲线y 1ij 代表正行程第j次曲线第i点的值y 2ij 代表反行程第j次曲线第i点的值)(21%100||21max12i i i i i y y y A y y h +=−=xy A回程误差4.求回程误差y A定度曲线5.定度曲线)(21%100||21max12iiiiiyyyAyyh+=−=x6.求作拟合直线,计算非线性度和灵敏度xy A%100×=AB非线性度(误差)xyS ΔΔ=B:定度曲线与拟合直线的最大偏差A:标称输出范围(全量程)灵敏度二、测试系统动态特性的测定二、测试系统动态特性的测定(一)频率响应法频率响应法:频率特性的测试,即正弦激励法通常对测试装置施加峰值为20% 量程左右的正弦信号,其频率自足够低的频率开始,以增量方式逐点增加到较高频率,直到输出量减少到初始输出幅值的一半为止,即可得A(w)和ϕ(w)。
1.一阶装置时间常数的确定ϕ(ω) = −arctg τω2)(11)(ωτω+=A 用A(w)或ϕ(ω)即可求出τ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二测试系统动态特性校准
1.1 实验目的
(1)掌握振动加速度测试系统的组成
(2)掌握振动压电、压阻加速度传感器原理和测量方法
(3)掌握振动传感器比较法动态特性校准的实验方法
(4)掌握数据处理的一般方法
1.2 实验系统基本组成
本实验系统由振动控制系统和远程数据采集、处理系统两部分组成。
振动控制系统中的振动台产生动态校准、动态测试所需的振动信号。
振动控制系统由振动控制仪、功率放大器、振动台和反馈传感器构成,目的是使振动台按照预先设定的参考谱进行振动。
标准传感器和被校传感器感受相同的振动,经过相应的变送器或放大器的输出电压信号送入数据采集系统,经服务器发送到学生实验客户端进行后续的动态校准与分析。
如图1所示
主要实验设备及性能
压阻放大器
系统灵敏度S=KEs=K ×0.328mv/g=2500×K1/500g=…mv/g SLM 振动加速度变送器输入输出关系式0.25v/g
● ● ● ●
●
●
实验工作站
(数据处理软件)
图1
图2
1.3 实验原理
实验以压阻式加速度传感器为校准对象,在振动台的家具台商采用背靠背的方式安装标准传感器与被校准传感器,这样保证了他们感受的是相同的振动信号,通过采集两个传感器的输出并将其送到学生实验客户端,通过比较不同的频率下的两个信号的幅值,用标准信号的灵敏度来计算出被校传感器的灵敏度,通过与理论制作比较来得到校准的结果。
1.4 实验操作
1.操作步骤
(1)固定好传感器,连接好相应的仪器与设备。
(2)打开振动台工控机与功率放大器的电源。
功率放大器的启动方法如下:1.按下去电源A按钮,这时电源B上的OFF按钮上的灯亮。
2.约等数秒后,按下电源B的ON开关,这时只有ON上的灯亮。
3.预热约3-5分钟。
(3)打开电荷放大器和变动期的开关,点击工控机桌面的vibration test.exe 图标,选择正弦扫频振动实验。
(4)旋转增益旋钮约至60%,运行自检。
(5)待系统提示自检成功,点击运行开始运行实验,按照本实验要求进行采集数据。
(6)采集完毕后,先将功率放大器的增益旋钮旋至复位,关闭各个软件。
功率放大器的关闭方式如下:1.将输出方式站换到低阻 2.按下电源B的OFF按钮,此时ON上指示灯灭,OFF指示灯亮。
3.约等十多秒后按下A按钮,此时只有风扇转动,可能会有短暂的声音,这是正常的。
(7)关断外部供电,实验完毕。
2 注意事项
(1)当由于电源干扰等原因引起的失控或计算机死机发生时,应按如下方式进行:
A 立即把功率放大器的增益平滑减至最小
B 关掉功放电源
C 关掉微机,改为自闭环,重新开机并进行检查
(2)如发现振动台工作不正常或动圈绕阻与壳体摩擦时,应首先关闭功放增益然后停机检修。
1.5 实验报告要求
(1)在200~1000Hz频率范围内,每隔40Hz对被校传感器进行校准。
(2)根据实际测试数据,求出对应被校传感器的灵敏度。
(3)进行误差分析,写出实验总结。
1.6实验记录
实验三测试系统动态测试误差修正
1.实验目的
1.1 掌握铂电阻温度测试系统的组成及测试原理.
1.2掌握铂电阻温度测试系统动态响应误差及一阶时域特性参数.
1.3掌握用模拟补偿网络进行动态特性校正的方法,并用T和其他参量的关系检查回归效果.
1.4熟悉实验所使用的各种仪器的基本工作原理和使用方法.
2.实验设备
温度测试系统是由铂电阻,调理电路,补偿网络和增益补偿四部分组成
实验系统方框图
本实验所用铂电阻为金属热电阻,铂热电阻与温度之间的关系近似线性。
在-200℃到0℃之间可用下式表示:
230[1(100)]t R R At Bt C t t =+++-
在0℃到650℃之间可用下式表示:
)1(20Bt At R R t ++=
式中 :℃时的铂电阻的电阻值温度为t R t -
℃时的铂电阻的电阻值温度为00-R
A,B,C-由实验确定的常数
任何测量温度的传感器和仪表旗帜是温度都不是立刻响应被测介质的温度变化的。
同样,铂电阻测温也有时间滞后的问题,滞后时间不仅决定于波电阻的导热系数,外壳的表面积,还决定于被测介质的热容量和导热系数以及介质本身的流动情况。
图二是铂电阻的实验阶跃响应曲线,当输入一个阶跃信号后,输出信号可近似的用一阶惯性环节来描述。
图二 铂电阻的实验阶跃曲线
(纵坐标是铂电阻输出信号的归一化值h(t)/h(∞),h(∞)为稳态值) 铂电阻的测温系统为一阶惯性环节,其传递函数为:
1
s )(+=
T K
s G 式中,T :时间常数;
s :拉氏算子; K :静态传递函数。
为了改善一阶惯性环节的动态特性,可串联一个时间常数相同的一阶微分环
节:
1
)
1()(++=
S T TS K s G dc dc dc
式中, dc K :动态补偿滤波器的静态传递函数;
dc T :动态补偿滤波器的时间常数。
在参数设计时,取其零点的时间常数就是被补偿测试系统的时间常数,其极点的时间常数dc T 符合动态性能要求。
动态补偿滤波器与测试系统串联后的等效系统的传递函数为:
1
)()()(+=
=S T KK s G s G s G dc dc
dc e
仍然是一阶惯性环节,但其时间常数dc T 是满足测试系统要求的,可能是改进前测试系统时间常数的1/5—1/10。
3.实验目的
用快速插入方法给温度测试系统加一阶跃温度激励,用存储示波器记录补偿前系统的响应.
根据此响应的时间常数和设计要求选择补偿网络,用同样的激励方式检查补偿后系统的阶跃响应,试比较各种补偿方法的效果,并计算各种补偿方法前后的动态特性参数,模拟补偿网络的电路图如下:
本实验所用的CW-I 测温系统动态特性补偿实验仪有三种补偿度(浅,中,深).每种补偿度的阻,容值分别如下:
∙ 浅补偿: R1=6. 2M Ω, R2=6.2 M Ω, C=1μ
f
i1 OC
V 补偿网络电路图
∙中补偿: R1=6. 2MΩ, R2=6.2 MΩ, C=1μf
∙深补偿: R1=6. 2MΩ, R2=6.2 MΩ, C=1μf
4.实验操作
4.1 操作步骤
打开恒稳槽电源,调节温度,使水加热到80摄氏度左右并保持恒定.(请在实验前20分钟先加热)
关闭直流稳压电源,然后分别将直流稳压电源上的+12V, -12 V , +24V和地接到CW-1对应的接线柱上.
将铂电阻信号调理电路引出的红线接到CW-1的+24V接线柱上,黑线接至CW-1的输入端
CW-1的选择开关打到内,将输入端补偿前与补偿后分别接到存储示波器的两个通道.
检查接线是否正确后,打开直流稳压电源.选择补偿开关(浅,中,深),每次只有一个开关按下.
打开存储示波器,选择合适的采样时间(推荐5s)和电压幅值(推荐1V). 调整示波器界面,使铂电阻传感器在室温下输出波形.
将传感器快速插入恒温槽并保持大约40秒,观察动态响应过程,并用存储示波器记录下波形.
取出传感器在瓷盘或玻璃杯中冷却,等待下一次实验使用.
观察存储示波器上记录的传感器补偿前, 后的波形, 并将波形通过与示波器连接的打印机打印出来.
选择不同的补偿度开关,观察不同补偿度的补偿曲线有何区别并记录每次测量的曲线.
4.2 自主性实验操作步骤
1. 补偿度开关按钮全部弹起,选择开关打到外,将外接补偿的引出端和地端接到外接线路板
上.自行设计并计算好网络参数.接好R1,R2,C构成的补偿网络,将补偿后的网络接进测温系统引入端.
2.打开直流稳压电源.
3.重复
4.1操作步骤5~9.
4.调节增益调节旋钮,使补偿前,后的静态输出相等,以保证补偿前,后的静态灵敏度不变.
4.3实验注意事项
1.恒温槽在实验过程中不能随意开,关,不要将铂电阻传感器顶端直接触硬物,以免顶端保护管破裂,损坏其内部的铂热电阻.
2.传感器不要长时间放在加热的恒温槽中,以免损坏传感器接线盒内的调理电路芯片.
3.传感器取出冷却过程中,一定放在瓷盘或玻璃杯中,以免烫伤其它的东西.
4. 严禁在未关闭直流稳压电源的情况下,对CW-I测稳系统进行接线.
5.实验报告要求
1.了解测稳系统动态特性补偿的工作原理及参数选择方法.
2.记录实验所用仪器设备的名称,型号.
3.记录和整理各次实验(浅,中,深)动态曲线,并标明不同补偿度的y-t坐标.
4.对动态曲线一阶系统计算各时域动态指标,如时间常数T,半值时间T0.5,上升时间T r, 响应时间T s等.并用T和其它变量的关系, T s=3 T, T r =2.2 T, T0.5=0.7 T来检查回归效果.
5.计算动态响应曲线超调量。