模糊控制查询表的计算
智能控制技术-第三课模糊控制2

相应输入(-6~6)对应不同集合的隶属度函数值(e=2.4,元素2)
µ NL NM NS ZE PS PM PL
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
1.0 0.8 0.4 0.1 0 0.2 0.7 1.0 0.7 0.2 0 0 0.2 0.7 1.0 0.9 0 0.5 1.0 0.5 0.9 1.0 0.7 0.2 0 0 0.2 0.7 1.0 0.7 0.2 0.1 0.4 0.8 1.0
如果A’=A
0.2 那么 0.2 B A R C 1 0.8 0.6 0.4 0.2 0.2 0.2 0.2 0.2 0.4 0.6 0.8 1
0.4 0.6 0.8 0.4 0.6 0.8 0.4 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0.2
0.4 0.6 0.8 0.4 0.6 0.8 0.4 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0.2
1 0.8 0.6 0.4 0.2
0.2 0.4 0.6 0.8 1 B “高电压” 1 2 3 4 5
方法2. 采用积运算法,即为RP
1 0.8 0.6 0.4 0.2
其中,每个元素是按最大-最小的合成规则计算出来的。如,上 式中第一个元素是这样计算的:
(1 0.2) (0.8 0.2) (0.6 0.2) (0.4 0.2) (0.2 0.2) 0.2 0.2 0.2 0.2 0.2 0.2
如果A’=A B A R p 0.2 0.4 0.6 0.8 1
如果A’=A2 B A2 R p 0.2 0.4 0.6 0.8 1
详解模糊控制
x1
x2
xn
例:设论域U={钢笔,衣服,台灯,纸},他们属于学习用品的隶属度分别 为:1, 0, 0.6, 0.8,则模糊集合学习用品可分别用向量表示法和扎德 表示法表示如下:
学习用品 (1 0 0.6 0.8)
学习用品=
模糊控制概述
~ ~
1 0 0.6 0.8 钢笔 衣服 台灯 纸
模糊控制
模糊控制是以模糊集理论、模糊语言变量 和模糊逻辑推理为基础的一种智能控制方法, 它是从行为上模仿人的模糊推理和决策过程的 一种智能控制方法。 该方法首先将操作人员或专家经验编成模 糊规则,然后将来自传感器的实时信号模糊化, 将模糊化后的信号作为模糊规则的输入,完成 模糊推理,将推理后得到的输出量加到执行器 上。
(1)求每条规则的蕴含关系 (Ai and Bi 采用求交运算,蕴含关 系采用最小蕴含)
1.0 1.0 0.6 0.2 A1 and B1 A1 B1 A1T B1 0.5 0
R1的运算
1.0 0.6 0.2 0.5 0.5 0.2 0 0 0
例:若A={a,b,c},B={1,2},则 A×B={(a, 1) (a, 2) (b, 1) (b, 2) (c, 1) (c, 2)} (a, 2) (a, 1) (a , 1) (b, 1)
元素之间可以互换位置。
B×A={(1, a) (1, b) (1, c) (2, a) (2, b) (2, c)} 0.5 0.5 0.5]
模糊推理的例子
(4)计算输出量的模糊集合
C ' ( A ' and B ') R
模糊控制规则表设计

模糊控制规则表设计概述模糊控制是一种基于模糊逻辑的控制方法,其可以处理输入输出之间存在模糊关系的控制问题。
在模糊控制中,规则表是一个关键的部分,它描述了输入和输出之间的关系,从而使控制系统能够根据当前输入的模糊值来确定相应的输出。
模糊控制基础在深入讨论模糊控制规则表设计之前,我们先了解一些模糊控制的基础知识。
模糊控制系统由四个基本部分组成:模糊化模块、模糊推理引擎、解模糊化模块和规则表。
模糊化模块模糊化模块将输入信号转换为模糊值,这些模糊值可以被模糊推理引擎进行处理。
常用的模糊化方法有隶属函数和隶属度。
模糊推理引擎模糊推理引擎是模糊控制系统的核心部分,它根据规则表进行推理,将模糊输入转换为模糊输出。
常用的推理方法有模糊关系的合成和模糊关系的蕴含。
解模糊化模块解模糊化模块将模糊输出转换为实际的控制信号,以实现对被控制对象的控制。
常用的解模糊化方法有隶属度最大值法和重心法。
规则表规则表是模糊控制系统中的重要组成部分,它描述了输入和输出之间的关系。
规则表通常由一系列模糊规则组成,每条规则包括一个条件部分和一个结论部分。
模糊控制规则表设计步骤设计一个有效的模糊控制规则表需要经历以下几个步骤:1. 确定输入和输出的模糊集合首先,需要确定输入和输出的模糊集合。
模糊集合是对输入和输出的模糊值进行离散化表示的方式。
常用的模糊集合包括三角形、梯形和高斯函数等。
2. 确定输入和输出的隶属函数隶属函数是模糊集合中的元素与输入或输出之间的映射关系。
选择合适的隶属函数能够更好地表达模糊集合之间的关系。
3. 确定规则的条件部分规则的条件部分描述了输入模糊集合之间的关系。
通过使用模糊集合的交集、并集和补集等操作,可以构建出条件部分。
4. 确定规则的结论部分规则的结论部分描述了输入模糊集合与输出模糊集合的关系。
可以根据实际需求,选择合适的输出模糊集合。
5. 构建规则表根据确定的条件部分和结论部分,可以构建出完整的规则表。
规则表可以使用表格的形式来表示,每一行代表一条规则。
模糊控制实例
x2 2 x5 A1 ( x ) 3 , 8 x 5 x 8 3
y 5 B1 ( y ) 3 11 y 3 z 1 C1 ( z ) 3 7 z 3 5 y 8 , 8 y 11
计算机控制算法
属函数 C ( z ) 为:
(1)以连续型重心法作为解模糊化机构:首先找出
因此
z 1 1 z 3 3 2 3 z 5 3 7 z C ( z ) 5 z 6 3 1 6 z 8 3 9 z 8 z9 3 3 z 1 52 67 z 81 99 z zdz zdz zdz zdz zdz 1 3 5 6 8 3 3 3 3 3 z 3 z 1 52 67 z 81 99 z dz dz dz dz 1 3 3 3 5 3 6 3 8 3 dz 28 16 49 28 25 18 3 18 6 18 2 4 1 2 1 3 3 2 3 6 4.7
{负大,负中,负小,负零,正零,正小,正中,正大}
{NB,NM,NS,NO,PO,PS,PM,PB}
第3章
计算机控制算法
2.变量的模糊化
基本论域:某个变量变化的实际范围 误差的基本论域为 [ xe , xe ] 误差变化的基本论域为[ xc , xc ] 输出变量的基本论域为[ yu , yu ]
变量的模糊子集论域 {n, n 1,
,0,
, n 1, n}
基本论域到模糊子集论域的转换公式
2n a b y x ba 2
模糊化就是将清晰的某个输入变量按隶属度转换到与 之相对应的模糊量的过程。
第3章
计算机控制算法
模糊控制器设计

若 输入为 A (0,0,0,0,0,0,1,0) 时
0 0 0 0 0 0 0 0 0 输出决策 B (0, 0, 0, 0, 0,1, 0) 0 0 0 0 0.5 1 0.5 0.5 0.5 1 0.5 0 0 0 0 0 0.5 1 0 0 0.5 0.5 0.5 0.5 0.5 0.5 0.5 1 0.5 0 0.5 1 0.5 0 0 0 0.5 0.5 0.5 0 0 0 0.5 0 0 0 0 0 0 0 0 0 0 0
A 与 r 7 的推理结果为 B 7 ,如下图
1 0.5 -3 -2 -1 1 2
A
PBe
1 0.5
0
3
-4
-3
-2
-1
0
1
2
3
4
B7
B 7 0.5 / 4 0.5 / 3 0 / 2 0 / 1 0 / 0 0 /1 0 / 2 0 / 3 0 / 4 (0.5, 0.5, 0, 0, 0, 0, 0, 0, 0)
2
确定输入量和控制量的论域及模糊参考集
(1) 确定输入量的论域及模糊参考集 设观测量为水位对 O 点的偏差 e, e 的最大变化范围为 e [emin , emax ] ; 将 e 乘上比例因子 k1 ,使得 k1e [3,3] 为一个标准范围; 将 k1e 适当的划分为若干的区间,比如常划分为 7 个值(如图) 。 这个过程称为量化过程。量化后的 ke 记为 E。
总的控制关系
R R1
R2
R3
R4
R5
求关系矩阵 R1 :
R1 NBe PBu
(从前面的参考集隶属度表可得到 NBe 和 PBu )
模糊控制器
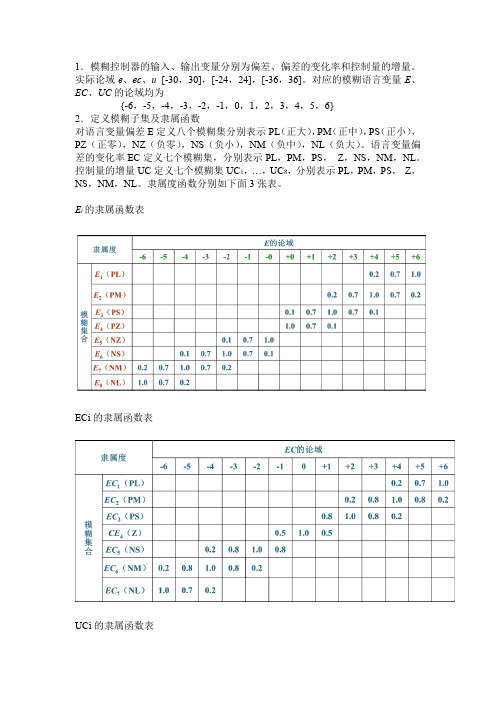
1.模糊控制器的输入、输出变量分别为偏差、偏差的变化率和控制量的增量。
实际论域e、ec、u[-30,30],[-24,24],[-36,36]。
对应的模糊语言变量E、EC、UC的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}2.定义模糊子集及隶属函数对语言变量偏差E定义八个模糊集分别表示PL(正大),PM(正中),PS(正小),PZ(正零),NZ(负零),NS(负小),NM(负中),NL(负大)。
语言变量偏差的变化率EC定义七个模糊集,分别表示PL,PM,PS,Z,NS,NM,NL。
控制量的增量UC定义七个模糊集UC1,…,UC8,分别表示PL,PM,PS,Z,NS,NM,NL。
隶属度函数分别如下面3张表。
E i的隶属函数表ECi的隶属函数表UCi的隶属函数表模糊控制规则如下表试计算控制表。
计算结果如下;设已知输入为0x 和0y ,模糊化运算采用单点模糊集合,则相应的输入量模糊集合'A 和'B 分别为:()()⎩⎨⎧≠==⎩⎨⎧≠==000001,01''y y y y y x x x x x B A μμ通过模糊推理方法及性质,可求得输出量的模糊集合'C 为:()()()()[]()[]()[]561'561''561''561''561'''''=======→→=→⨯⨯=⨯=⨯=i i i iB iA i i i i i i i i i i C C C C A B C A A C B A B A B A B A C iR R首先根据书上的表2-8、2-9、2-10如上面三个表所示,建立三个矩阵A 、B 、C 分别对应三个表中的数据,为了便于计算表2-10的数据自行规定为:NB=1,NM=2,NS=3,NZ=4,PS=5,PM=6,PB=7。
模糊控制基本实验

1假设一个双输入/单输出系统,输入X∈[-5,5]和Y ∈[-10,10]模糊化成三级:负、零、正,输出Z ∈[-5,5]模糊化成五级:负大、负小、零、正小、正大。
模糊规则表如下所示。
适当选择隶属度函数后,设计一个基于Mamdani模型的模糊推理系统,绘制出输入/输出曲线,并计算当X和Y分别为-3和5以及-2和-7时输出Z的大小。
图1:输入变量X范围及隶属度函数曲线
图2:输入变量Y范围及隶属度函数曲线
图3:输出变量Z范围及隶属度函数曲线
图4:输入输出变量三维曲面图
图5:输入变量X=-3,Y=5时输出变量Z值
图6:输入变量X=-5,Y=-9时输出变量Z 值
2.查找相关文献,设计能跟踪给定输入的模糊控制器,假设系统模型如下:
其中K=30, T1=10, T2=40, Td=2。
(用simulink 搭建系统,对系统进行仿真,给
出系统的阶跃响应曲线)
图7:模糊控制经验规则
)
1)(1()(21s T s T Ke s G s
T d ++=
-
图8:E和EC的范围及隶属度函数曲线
图9:输出变量u的范围及隶属度函数
图10:模糊控制规则
图10:模糊控制规则观察表
图11:输入输出变量三维曲面图
图12:simulink仿真电路图
其中,经过多次试探,当K1=2.4,K2=0.65,K3=1.15时,仿真效果较好。
图13:系统单位阶跃响应输出曲线图。
pid模糊控制算法

PID模糊控制算法介绍PID控制算法在控制系统中,PID是一种常用的控制算法,其全称为比例-积分-微分控制(Proportional-Integral-Derivative Control)算法。
PID控制是一种反馈控制算法,通过根据系统输出和预期输出之间的误差来调整控制器的输出,以使系统输出逼近预期输出。
PID控制算法被广泛应用于工业控制、机器人控制、自动驾驶等领域。
PID控制算法由三个部分组成: - 比例(Proportional):比例控制部分根据误差的大小,产生一个与误差成正比的控制量。
比例控制可以实现快速响应,但可能产生稳态误差。
- 积分(Integral):积分控制部分根据误差的累积值,产生一个与误差积分成正比的控制量。
积分控制可以消除稳态误差,但可能导致超调和振荡。
- 微分(Derivative):微分控制部分根据误差的变化率,产生一个与误差导数成正比的控制量。
微分控制可以增加系统的稳定性,减少超调和振荡,但可能引入噪声。
模糊控制模糊控制是一种基于模糊逻辑的控制方法,与传统的精确控制方法相比,模糊控制更适用于处理不确定性、模糊性和非线性的问题。
模糊控制使用模糊规则来描述输入和输出之间的映射关系,通过模糊推理和模糊集合运算来产生控制量。
PID模糊控制PID模糊控制是将PID控制算法与模糊控制相结合的一种控制方法。
PID模糊控制通过将PID控制器的参数调整为模糊集合,以便更好地适应系统的动态特性和非线性特性。
PID模糊控制可以克服PID控制算法在处理非线性系统时的局限性,提高控制系统的性能和鲁棒性。
PID模糊控制的基本原理PID模糊控制的基本原理是将PID控制器的输入和输出转换为模糊集合,通过模糊推理和模糊集合运算来确定最终的控制量。
具体步骤如下: 1. 确定模糊控制器的输入和输出变量:通常将系统误差和误差变化率作为模糊控制器的输入变量,将控制量作为输出变量。
2. 设计模糊规则库:根据经验和专家知识,设计一组模糊规则,来描述输入和输出之间的映射关系。