叉车同步转向系统的设计研究
电动叉车行走驱动系统设计与实现

reliable,outstanding performance,strong practicability.
Key words:Electric forklift,DSP,PMSM,drive system,walking function
II
硕士论文
电动叉车行走驱动系统设计与实现
目录
摘 要...............…...........................…...….........................................................I
2驱动系统控制方案研究………………………………………………………………。5
2.1永磁同步电机电流控制……………………………………………………………。5 2.1.1电流变换………………………………………………………………………5 2.1.2 id=0控制………………………………………………………………………………………………7
system.
Through the electric forklift motor drive system and control requiremems of the analysis,
the paper gives a low voltage high current PMSM drive scheme.The master control chip is high performance DSP chip TMS320F28 1 2.The system uses vector control algorithm and
叉车智能控制系统设计研究

叉车智能控制系统设计研究
叉车智能控制系统设计研究
本文设计了一款叉车智能控制系统。
提出了针对大型工厂多个叉车的控制方案。
该方案由两个部分构成,第一部分,仓库间的相互运输过程,由控制中心生成二维码的控制方案,该方案涉及智能叉车对道路的识别,控制中心对线路切换装置回转中心的控制和对搬运信息的二维码的生成与识别。
第二部分,仓库内部的对特定物体的颜色和形状的识别,对自身位置和目标位置以及障碍物的位置进行确定,设计合理的bezier曲线前进路线、进行自动装载和自动卸载,将指定物体放置到给定地点。
整个过程由控制中心控制该系统可以监控和配合控制叉车,叉车下位机通过WIFI模块将图像及数据信息上传给上位机,上位机进行分析、处理,并对叉车进行实时控制。
系统使用Microsoft Visual Studio 2010平台上的C#语言开发出上位机并生成exe可执行软件,使软件具有通用性。
采用Keil uVision4开发平台开发下位机控制程序。
高度的智能化可以实现自我控制,完成给定的作业目标,大大提高了工作效率,节省了财力人力。
工作过程全程由电脑监控、控制和任务分配工作,使得对叉车的控制更精确,工作更合理,更节能,最终整个系统可以达到控制整个工厂,实现无人工厂,而且这个系统通用性很强,可以应用于各种车辆。
该系统为工程车辆的智能化、信息化、自动化和产业化提供了条件。
叉车转向的原理
叉车转向的原理叉车是一种用于搬运货物的起重设备,通过前轮转向来实现转弯和调整方向的功能。
叉车的转向原理可以分为操纵机构、传动机构和转向机构三个方面。
首先是操纵机构。
操纵机构包括方向盘、转向装置等,通过驾驶员操控方向盘来改变前轮的转向角度。
当驾驶员转动方向盘时,方向盘上的操作杆和连接杆将转动的力矩传递给转向装置,驱动转向装置上的齿轮、齿条或滚珠丝杠等,使前轮转向。
其次是传动机构。
传动机构包括转向轴、齿轮、链条等组成。
转向轴是连接方向盘和前轮的传动轴,其上装有齿轮和链条。
当方向盘转动时,转动轴上的齿轮或链条会带动其他齿轮、链条转动,最终使前轮转向。
传动机构的作用是将驾驶员的操作转化为实际的转向角度,并将力矩传递到转向机构上。
最后是转向机构。
转向机构包括前轴、前轴悬挂和转向系统等。
前轴是叉车悬挂着前轮的重要部件,它支撑着整个前轮系统,使得前轮能够自由转动。
前轴悬挂是通过弹簧、减震器等构成的,用于减缓前轮受到的颠簸和冲击力。
转向系统包括转向臂、转向杆、悬挂臂等,通过连接杆将转动的力矩传递给前轮,使其转动。
总的来说,叉车转向的原理可以概括为驾驶员操纵方向盘,通过操纵机构将操作转化为转动力矩,经过传动机构传递到转向机构,最终使前轮转动,实现叉车的转向。
整个转向过程是一系列机构的协同作用,确保叉车能够灵活、准确地转向。
叉车转向的原理还有一种常见的方式是后轮转向。
后轮转向的叉车通过操纵机构将驾驶员的操作转化为力矩,通过传动机构传递给转向机构,最终使后轮转动。
与前轮转向相比,后轮转向具有更小的转弯半径和更灵活的转向性能。
后轮转向的叉车在转弯时后轮会旋转,这会对叉车的稳定性产生一定的影响,所以在操作时需要根据实际情况进行调整和掌握。
总结起来,叉车的转向原理是通过操纵机构将驾驶员的操作转化为转动力矩,经过传动机构传递给转向机构,最终使叉车的前轮或后轮转动,实现转弯和调整方向的功能。
不同类型的叉车有不同的转向系统,但整体原理是相似的。
叉车转向系统的重要性及检验要点

叉车转向系统的重要性及检验要点摘要:内燃平衡重式叉车因转向系统出现问题而发生侧翻事故。
根据监控录像和对事故现场的调查,对叉车侧翻的成因进行了分析,并提出了预防建议和叉车转向系统的检查重点。
关键词:叉车;侧翻;检查要点;分析引言机动工业车辆范畴中,叉车成了唯一装备品种,可见质检总局对叉车安全问题的高度重视。
由于量大、工作环境复杂、流动性大,部分使用单位对于叉车安全检查重视不够。
转向系统性能好坏决定着叉车运行稳定性及转向准确度,因为转向系统中一些故障较为隐蔽,通常在起步时表现得不是很突出,对于叉车作业影响不大,易被用户忽略而得不到及时修复,因此埋下了安全隐患。
1电动平衡重叉车转向机构的设计构想电动平衡重式叉车以电池组取代平衡重,高效地缓解叉车净重,可是为确保叉车作业时的稳定性,务必增加叉车轴距才能使其转弯半径增加进而车子灵活性降低,电动平衡重式叉车转向机构有如下设计思想,主要目的是对于电动平衡重式叉车应用灵活性较弱这个难题,提供参考。
一是独立悬挂结构等。
叉车前面向其工作设备,因此工作时叉车前胎负载大,通常采用后桥为转向桥,减少转为阻力矩和增强叉车轻巧性。
转向桥的主要功能是将车架与车轮相互连接,它也叫悬挂系统。
叉车悬挂系统运用对叉车行驶时的可靠性和平顺性具备重要影响。
对三支点电动平衡重式叉车而言,它仅需1个转向轮,而且它的轮架能够直接连接在窗框上。
四支点电动平衡重式叉车则采用刚度悬架组织,叉车转向轮和转向桥为刚性连接,转向桥无弹性元件,与车轮支座立即固接。
该悬架结构在遭遇地面不平的时候会把冲击传达到车身上,从而引起叉车车身造成震动且运动特性较弱。
二是电动平衡重式叉车在转向机构悬架结构上采用独立悬挂,与四支点电动平衡重式起重机刚度悬架结构有截然不同,独立悬挂组织内叉车每个车轮都可各自挂放置窗框上,而转向机构内提升有传送负载的平衡装置且两车轮中间互不相关不出现功效。
独立悬架构造没有与车轮连接的梁设备,因而不承担车轮产生的负载,叉车二轮架乃至遭受不平地面时也能承担叉车负载,车轮受震动将会传导到独立悬挂构造扭杆处,这样才不会对另一个车轮造成影响,因此独立悬挂构造能够确保叉车行车稳定性。
叉车方向开关的改进与设计
构 安 装 不方 便 。因 为 它 是 靠 一 条 线 接 触 , 安装 时 必 须 等 外 面 卡 圈 的螺 钉 固定 后 才 能 对 准 位 置 。 ( )安 装 产 品 时 在 钢 球 和 拨 轮 的 圆弧 槽 之 间 没 有 加 注 5
道 的通 断 ,以 此 输 出开 关 的 前 进 或 后 退 信 号 。 另 外 ,霍 尔 开 关 具 有 无 触 电 、低 功 耗 、长 使 用 寿 命 、 响应 频 率 高 等 特
点 , 内 部采 用 环 氧 树 脂 封 灌 成 一 体 化 ,所 以 能 在 各 类 恶 劣 环 境 下 可靠 地 工 作 。 而 场 效 应 管 是 利 用 改 变 电 场 ,来 控 制
挡块选用 4 5号 钢 制 作 没 有 进 行 热 处 理 ,表 面 硬 度 也 不 够 。
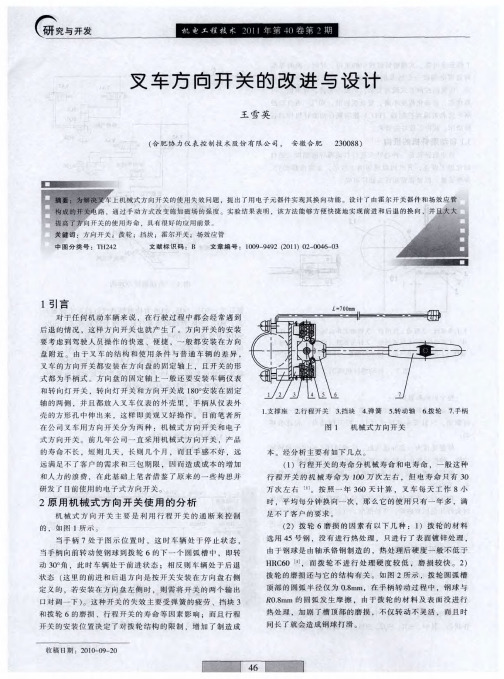
1支 撑 座 .
6转 动 轴 .
2电 路 模 块 .
7拨 轮 .
3霍 尔 开 关 器 件 .
4磁 钢 .
5挡 块 .
8手 柄 .
图 4 改 进 后 的 叉 车 方 向 开 关
图 3 挡 块 结 构
转 动 手 柄 8使 安 装 在 拨 轮 7底 部 的磁 钢 4分 别 给 上 下 两 个 霍 尔 开 关 器 件 3以磁 场 , 使 霍 尔 开 关 的输 出 端 的 电 动
( ) 支 撑 座 l和 拨 轮 6之 间 的 连 接 是 靠 转 动 轴 5用 开 4 口销定 位 的 ,开 口销 的定 位 精 度 不 高 ,这 样 导 致 拨 轮 在 轴
研 究 与
3 1工 作 原 理 .
霍 尔 开 关 可 方 便 地 把 磁 输 入 信 号 转 换 成 实 际 应 用 中 的 电 信 号 ,同 时 又 满 足 工 业 场 合 实 际 应 用 易 操 作 和 可 靠 性 的
第二章叉车动力传动转向制动系统

第二章叉车动力传动转向制动系统1. 引言本文档将介绍叉车的动力传动、转向和制动系统。
动力传动系统负责将发动机的动力传输到叉车的驱动轮上,转向系统用于控制叉车的方向,而制动系统则用于控制叉车的停止。
我们将详细讨论这些系统的工作原理和组成部件。
2. 动力传动系统动力传动系统是叉车的重要组成部分,它将发动机的动力传输到叉车的驱动轮上,使叉车能够行驶。
通常,动力传动系统包括以下几个组件:•发动机:发动机是叉车的动力源,可以是内燃机或电动机。
•变速器:变速器用于控制叉车的速度,可以根据需要进行换挡。
•驱动轴:驱动轴将动力从变速器传输到驱动轮上。
•驱动轮:驱动轮接触地面,并将动力转化为牵引力,使叉车前进或倒退。
动力传动系统使叉车具备了行驶能力,但在操作时需要注意安全性和平稳性,以确保驾驶员和货物的安全。
3. 转向系统转向系统用于控制叉车的方向。
它使驾驶员能够将叉车转向左侧或右侧,以适应不同的工作环境和道路条件。
主要的转向系统包括以下几个部分:•方向盘:驾驶员通过方向盘控制叉车的转向。
•转向柱:转向柱将方向盘上的转动力传输到转向机构。
•转向机构:转向机构将转动力传输到转向轮,使叉车转向。
•转向轮:转向轮与驱动轮相连接,通过向左或向右转动来改变叉车的方向。
转向系统是叉车操作的关键,它需要具备灵敏的响应和准确的控制,以确保叉车在狭小空间中的准确操作。
4. 制动系统制动系统用于控制叉车的停止。
在操作中,驾驶员需要将叉车停下来,以完成装卸货物等操作。
制动系统主要由以下几个组件组成:•制动踏板:通过踩下制动踏板来启动制动系统。
•制动驱动器:制动驱动器将踏板的力传输到制动系统。
•制动器:制动器通过与驱动轮接触来减慢或停止叉车的运动。
•制动液:制动液用于传输制动力并增加制动的稳定性和可靠性。
制动系统的设计和性能直接关系到叉车的安全性。
良好的制动系统能够保证叉车在急停等极端情况下具备稳定的制动性能。
5.本文档介绍了叉车的动力传动、转向和制动系统。
叉车转向系统动力学建模仿真及转向性能研究
叉车转向系统动力学建模仿真及转向性能研究
向晨曦;邓珞;计三有
【期刊名称】《起重运输机械》
【年(卷),期】2024()7
【摘要】平衡重式叉车是一种专门设计用以装卸搬运的工业车辆,在港口码头等运输行业的应用非常广泛。
目前,由于叉车的运行工况环境复杂,且工作过程需要频繁进行转向操作,叉车的转向系统性能和运行稳定性愈发受到关注。
文中为提升平衡重式叉车转向性能,以某4 t平衡重式叉车为研究对象,建立了基于主动后轮转向的滑膜控制系统仿真模型,研究其对叉车在不同工况条件下转向系统性能的影响并进行评价。
【总页数】9页(P50-58)
【作者】向晨曦;邓珞;计三有
【作者单位】武汉理工大学交通与物流工程学院;武汉航空仪表有限责任公司【正文语种】中文
【中图分类】U294.272
【相关文献】
1.FD420A型叉车负荷传感全液压转向系统及转向机构的优化设计
2.叉车线控转向系统转向轮转角模糊控制策略研究
3.电动叉车电动助力转向系统转向液压阻尼装置结构设计
4.电动叉车线控转向系统主动转向控制策略探析
5.基于整车动力学的电动助力转向系统建模仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ROS架构的叉车型AGV控制系统设计开发研究
2 控制系统的总体架构及硬件选型
2.1 控制系统的总体架构 本文所提出的控制系统采用双层控制器结构
的设计。上层控制器采用威嵌沃 VBOX鄄200 工控机, 其上装有 Linux 操作系统 Ubuntu20.04 和ROS鄄Noetic 开源机器人操作系统,负责接收并处理激光雷达和 IMU 信 息 ,估 计 AGV 位 姿 ,实 现 定 位 及 建 图 功 能 , 轨迹跟踪控制,并将控制指令发送到下层控制器进
有 日 益 广 泛 的 应 用[2]。 AGV 控制系统作为机器人的功能核心,通常由
定位导航、路径规划、运动控制、人机交互、通信等 模块组成[3]。 AGV 控制系统需要通过自身传感器信 息进行系统状态估计;同时,根据作业调度信息对
收 稿 日 期 :2024-01-04;修 订 日 期 :2024-04-22 作者简介:刘光印(1997—),男,硕士,研究方向为 机 器 人 SLAM 及 智 能 控 制 ;钱 东 海 (1971—),男 ,博 士 ,副 教 授 ,研 究 方 向
电池 监控
驱动电机 驱动器
中图分类号:TP242 文献标识码:A
文 章 编 号 :1001鄄9944(2024)05鄄0034鄄06
Design and Development of Forklift AGV Control System Based on ROS Archi鄄 tecture
LIU Guangyin,QIAN Donghai,XIAO Ziming,WANG Zhiguo
行输出控制。 下层控制器采用西门子 S7鄄1200 系列 PLC 作为车载控制器,主要负责外围传感器设备的 信息采集,并通过 CAN 通信方式向舵轮行走电机和 转向电机发送行走速度和转角的控制指令,以及接 收来自两电机驱动器发送的实际的行走速度及转 角信息。 上层与下层控制器之间采用 TCP/IP 网络通 信。 控制系统总体架构如图 4 所示。
叉车转向机构优化设计 张浩辰
叉车转向机构优化设计张浩辰摘要:分析叉车转向机构转向特性、结构形式和转向液压缸活塞杆受力情况,建立转向机构数学模型。
在此基础上以转角误差为约束条件,以转向液压缸推拉力最小为目标函数,对叉车转向机构进行优化设计,并对其进行实例计算,结果表明优化后的转向机构不仅满足转角误差的限定条件,还可有效减少转向液压缸推拉力。
该优化方法可对叉车转向机构的设计和叉车性能的改善提供一定的参考依据。
关键词:叉车;转向机构;优化设计引言电叉车转向机构现在普遍采用横置液压缸式转向机构,这种结构具有形式简单、机构紧凑、布置方便和偏转角大等优点。
但是在转向机构设计过程中会遇到一些难题,比如车轮转角误差过大会影响轮胎磨损、油缸径向力大会导致油缸漏油、油缸行程大会引起机构干涉和油缸布置困难、转向油缸推力(或者进油量)要求大则导致转向操作的灵敏性差等问题,并且这些问题之间会相互牵制与制约,很难同时实现的最优设计,因此优化设计方法(特别是多目标优化方法)需要被引入到叉车转向机构的设计过程中。
1矿用叉车转向机构的建模与仿真(1)转向机构建模在ADAMS软件中,用工具箱中连杆创建转向机构.该转向机构初始主要参数如下:转向节臂m=300mm,液压缸偏距s=140mm,转向节臂初始角口-79.30。
连杆长度n=250mm。
其中主销中心距M_2254mm.叉车轴距£_5500mm.液压缸安装距为l750mm:(2)创建轮胎和地面ADAMS中自带有多种不同类型的轮胎和地面谱特性文件.用户根据需要可以选择任一种轮胎和与之相匹配的地面模型。
选择UA轮胎模型和二维平整路面。
UA轮胎模型可考虑外倾和松弛长度,在需要有限参数的情况下.能够取得非常好的精度:(3)创建运动副创建了虚拟样机后.就需要使用约束副将它们连接起来.以定义物体之间的相对运动。
2转向机构优化(1)确定约束条件考虑转向机构的要求,空间位置的布置、结构等因素,给出限制条件:260≤r≤340;210≤f≤290;110≤e≤170;760≤口≤84。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[ 1 ] C a r l o s S a n t o l a r i a Mo r r o s ,J e s U S Ma n u e l F e r n .N u m e r i c a l
Mo d e l i n g a n d Ho w An a l y s i s o f a C e n t i r f u g a l P u mp Ru n n i n g a s a T u r b i n e :Un s t e a d y Ho w S t r u c t u r e s a n d I t s E f e c t s o n t h e
性能 , 加入 了 P I D控 制 算 法 调 节 , 仿 真 结果 表 明所 建 系统 响应 速 度 快 、 转 向 精度 高 。最 后 试 验 研 究 与 仿 真 结 果 吻 合 . 表 明 所 设 计 的系 统 能 够 满 足 实 际 转 向 的要 求 。 关键词 : 转 向器 ; 同 步转 向 ; 控 制 系 统 中图 分 类 号 : T H1 3 7 文献标识码 : B 文章 编 号 : 1 0 0 8 — 0 8 1 3 ( 2 0 1 4 ) 0 3 — 0 0 1 2 — 0 3
[ R 】 . A I A A P a p e r , 2 0 0 1 - 2 5 8 3 .
『 7 1 王晓峰席 光, 王尚锦. 离心压缩机 叶轮的响应 面优 化设计 I :
设计方法[ J ] . 工 程 热物 理 学 报 , 2 0 0 4 , 2 5 ( 3 ) : 4 0 8 - 4 1 0 .
安全 性等 目标 。前 一项 目标 与环 境保 护 密切 相关 . 是 当 代 全球 性 热 门话 题 .后 两 项 目标 是 车辆 朝 着 高性 能化 方 向发 展 必须 研 究 和解 决 的重 要 课题 。车 辆转 向系统
测, 自动 补偿 和修 正 , 使 车辆 的操 作 更 为 准 确 . 实现 自
U 日 I J舌
关键 部分 。在追求 高 效节 能 、 高舒适 性 和高 安全 性 的今
天, 拥 有 同步 转 向功 能 的 工程 车辆 , 以转 向系 统 的 自动 检 测 。通 过对 转 向车 轮和 方 向盘 的转 向角 度 的 自动 检
现 代 工程 车 辆技 术 追求 高 效 节 能 、高 舒适 性 和 高
动 精 确定 位成 为全 液压 转 向技术 研 究 的焦 点 本文 通 过 对 同步 转 向组 成 结构 进 行 了分 析 .解 释 了其 工作 原 理 在分 析 了全 液 压转 向系 统 的工 作 原理 和 液 压转 向 器 的结 构 后 。 建 立 了液 压 转 向器 的 流体 动力 模 型 、 数 学 模 型 。接 着 利 用所 建 的数 学 模 型对 同 步转 向系统 组 成 各 元 件进 行 特性 分 析 .了解 了影 响 系 统性 能 的一 些 参
『 8 1 刘小兵 , 程 良俊. 离 心 泵 用 作 水 轮 机 时 的 特 性 分 析 及 问 题 讨
G 1 o b a l P e f r o r m a n c e[ J ] .I n t e r n a t i o n a l J o u ma l f o r N u m e r i c a 1
液压 气动 与密 封/ 2 0 1 4年 第 0 3期
d o i : l O . 3 9 6 9 / j . i s s n . 1 0 0 8 - 0 8 1 3 . 2 0 1 4 . 0 3 . 0 0 4
叉车 同步转 向系统 的设计研 究
秦 志文 , 张君 君 , 张 燕
The De s i g n a nd R e s e a r c h o f S y n c h r o n o us S t e e r i ng S y s t e m f o r F o r k l i f t Tr uc k
Q I N Z h i — w e n , Z H A NG J  ̄ n - j u n , Z H AN G Y a h
( 镇 江液 压股 份有 限公 司 , 江苏 镇江
摘
2 1 2 0 2 1 )
ቤተ መጻሕፍቲ ባይዱ
要: 介 绍 了 一 种 叉 车 同 步 转 向控 制 系 统 。 通 过 对 该 系统 的原 理 分 析 , 建 立 了其 相 应 的数 学 模 型 , 并通 过仿 真分 析 了所 建 系 统 模 型 的
Me t h o d s i n Hu i d s . 2 0 1 1 , 6 5 ( 5 ) : 5 4 2 - 5 6 2 .
[ 2 ] K o s u k e A s h i h a r a ,A k i r a G o t o . T u r b o ma e h i n e r y B l a d e D e s i g n
是影 响 叉 车操 纵 稳定 性 、行 驶 安 全性 和 驾 驶舒 适 性 的
收 稿 日期 : 2 0 1 4 一 O 1 — 0 9
作者简介: 秦志文 ( 1 9 7 4 一 ) , 男, 江苏镇江人 , 本科, 研究方 向: 全 液 压 转 向
器研发设计。
参
考
文 献
【 6 】B e n i n i ,E . ,T o u l r i d a k i s , A. .D e s i g n O p t i mi z a t i o n o f V a n e d