opencv找圆算法
halcon提取圆的算子

halcon提取圆的算子摘要:1.引言2.Halcon提取圆的算子介绍3.提取圆的基本步骤4.实际应用案例5.总结正文:Halcon是一种常用的机器视觉开发软件,它提供了丰富的图像处理和分析功能。
在Halcon中,提取圆是一种常见的操作,可以通过特定的算子来实现。
本文将详细介绍Halcon提取圆的算子及其应用。
一、Halcon提取圆的算子介绍在Halcon中,有多个用于提取圆的算子,主要包括:1.圆检测(Circle Detection)2.圆拟合(Circle Fitting)3.圆测量(Circle Measurement)1.圆检测(Circle Detection)圆检测算子用于检测图像中的圆形物体。
它根据一定的准则判断图像中的像素是否构成一个圆形,并将满足条件的像素集合作为圆的边界。
常用的圆检测算子有:- Circle Hough- Circle Template- Circle Edge2.圆拟合(Circle Fitting)圆拟合算子用于根据圆的边界像素计算圆心和半径。
常用的圆拟合算子有:- Circle Center- Circle Radius3.圆测量(Circle Measurement)圆测量算子用于测量圆的面积、周长等参数。
常用的圆测量算子有:- Circle Area- Circle Circumference二、提取圆的基本步骤使用Halcon提取圆的基本步骤如下:1.读取图像并进行预处理,如灰度化、滤波等2.选择合适的圆检测算子检测圆形物体3.对检测到的圆形进行圆拟合,计算圆心和半径4.根据需要,使用圆测量算子测量圆的面积、周长等参数三、实际应用案例以下是一个使用Halcon提取圆的实际应用案例:假设有一个摄像头拍摄的图像,其中包含多个硬币。
我们需要检测这些硬币并计算它们的直径。
1.读取图像并进行预处理,如灰度化、滤波等2.使用Circle Detection算子检测图像中的圆形物体3.对于检测到的每个圆形,使用Circle Fitting算子计算圆心和半径4.根据圆的半径计算硬币的直径5.输出硬币的直径四、总结Halcon提供了丰富的圆提取算子,可以满足不同场景下的需求。
hough变换检测圆的一般步骤
hough变换检测圆的一般步骤Hough变换是一种图像处理算法,可用于检测图像中的几何形状,如直线、圆等。
它最早于1962年由Paul Hough提出,用于在图像中检测直线。
之后,Hough变换被扩展用于检测圆。
下面是检测圆的Hough变换的一般步骤。
1.预处理:首先,需要对图像进行预处理,以去除噪声和增强有用的特征。
这可以通过应用图像滤波器、边缘检测等技术来完成。
常用的滤波器有高斯滤波器和中值滤波器。
2. 边缘检测:通过应用边缘检测算法,如Canny边缘检测算法,可以从图像中提取出边缘信息。
3. 参数空间构建:Hough变换通过在参数空间中对每个可能的圆心点和半径进行计数来检测圆。
参数空间是一个二维坐标系统,其中一个轴表示圆心点的x坐标,另一个轴表示圆心点的y坐标。
所有的点在参数空间内都对应着可能的圆。
4.参数空间转换:为了在参数空间中进行计数,需要将每个边缘点转换为在参数空间中的可能圆心点和半径的集合。
5.累加计数:对于每个转换后的边缘点,将其映射到参数空间中的可能圆心点和半径,并对相应的计数器进行累加。
6.阈值化:根据累加计数器的结果,在参数空间中找到可能的圆。
通过设置适当的阈值,可以筛选出累加计数器高于阈值的圆。
7.圆心和半径提取:在参数空间中找到累加计数器高于阈值的圆之后,可以通过从参数空间中提取出圆心坐标和半径的方式来还原检测到的圆。
8.圆检测:通过对检测到的圆进行验证和过滤,可以排除掉一些错误检测的圆。
以上是检测圆的Hough变换的一般步骤。
这些步骤可以作为基础,根据具体需求进行一定的修改和优化。
例如,可以通过设置不同的阈值、调整参数空间的分辨率等方式来改进圆的检测效果。
另外,为了提高效率,还可以使用一些加速技术,如局部累加器、投票框架等。
opencv中霍夫变换检测椭圆

opencv中霍夫变换检测椭圆OpenCV 是一个开源的计算机视觉库,提供了许多强大的图像处理和分析工具。
其中之一就是霍夫变换,可以用来检测图像中的直线、圆和椭圆等形状。
本文将重点介绍如何使用霍夫变换来检测椭圆。
椭圆是一个具有对称性的二维曲线,一般用两个轴来描述其形状:长轴和短轴,通常用 a 和 b 表示。
根据椭圆的方程 `x^2/a^2 + y^2/b^2 = 1`,我们可以推导出其他相关参数,如椭圆的中心坐标和倾斜角度。
在开始检测椭圆之前,我们首先要导入必要的库和加载图像。
以下是一个示例代码:```pythonimport cv2import numpy as np# 读取图像image = cv2.imread('ellipse.jpg')# 将图像转换为灰度gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 对图像进行平滑处理blur = cv2.GaussianBlur(gray, (5, 5), 0)```接下来,我们要使用霍夫变换检测图像中的椭圆。
在 OpenCV 中,`cv2.HoughCircles()` 函数可以用来检测圆形,但不能直接用来检测椭圆。
不过,我们可以通过将椭圆转化为圆的方式来实现检测椭圆。
为了实现这一点,我们可以利用两个关键函数:`cv2.HoughLinesP()` 和 `cv2.ellipse()`。
首先,我们使用 `cv2.HoughLinesP()` 函数检测直线,然后根据这些直线的交点来估计椭圆的参数。
```python# 运行霍夫直线检测lines = cv2.HoughLinesP(blur, 1, np.pi/180, threshold=100, minLineLength=150, maxLineGap=30)# 创建椭圆检测器对象ellipse_detector = cv2.createLineSegmentDetector()# 使用 Hough 直线检测结果估计椭圆参数for line in lines:x1, y1, x2, y2 = line[0]ellipse_detector.detect(blur, lines)ellipses = ellipse_detector.detect(blur)```此时,我们已经成功地检测到了图像中的椭圆参数。
霍夫变换原理检测圆的原理

霍夫变换原理检测圆的原理霍夫变换(Hough Transform)是一种数字图像处理技术,主要用于检测图像中的模式或物品,如直线、圆或任何其他形状。
其中,检测圆的原理是基于霍夫变换的圆检测算法。
首先,需要明确圆的数学表达式。
圆的一般方程为:(x –a)^2 + (y –b)^2 = r^2其中,a和b表示圆心的坐标,r表示半径。
基于这个数学表达式,可以推导出霍夫圆变换的算法原理。
相比于霍夫直线变换,霍夫圆变换需要考虑三个参数:圆心x坐标、圆心y坐标和半径r。
因此,在霍夫圆变换中,需要构建一个三维空间来表示所有满足圆方程的点。
具体而言,可以将三个参数分别设定成三个坐标轴,其中,x轴表示圆心x坐标,y轴表示圆心y坐标,z轴表示半径r。
接下来,对于给定的图像,利用霍夫圆变换来检测其中所有圆。
步骤如下:1. 选择图像中的一个点。
2. 在三维空间中,遍历所有可能的圆心位置和半径大小。
3. 如果当前遍历到的圆心和半径位置满足圆的方程,那么就在三维空间中标记这个点。
4. 重复步骤1~3,对于所有图像中的点进行遍历。
5. 经过遍历后,在三维空间中,所有标记的点都应该落在同一频繁性最高的球面上。
6. 在球面上,可以定义一个圆心和半径,这个圆心和半径就是最终检测出的圆的位置和大小。
7. 重复步骤1~6,对于所有图像中的圆进行遍历。
霍夫圆变换需要对所有可能的圆心位置和半径大小进行遍历,因此计算量非常大。
为了减少计算时间,通常采用一些优化方法,例如逐步增加圆的半径大小或设定一个半径范围。
总体而言,霍夫圆变换是一种有效的圆检测算法,它不仅可以检测出图像中的所有圆,还可以确定它们的位置和大小。
在计算机视觉、医学图像处理等领域广泛应用。
EmguCV类(CvInvoke_Class) 方法整理
规范化输入数组
Randn(IInputOutputArray, IInputArray, IInputArray)
用正态分布的随机数填充数组
Randn(IInputOutputArray, MCvScalar, MCvScalar)
用正态分布的随机数填充数组
RandShuffle
将原数组(矩阵)打乱
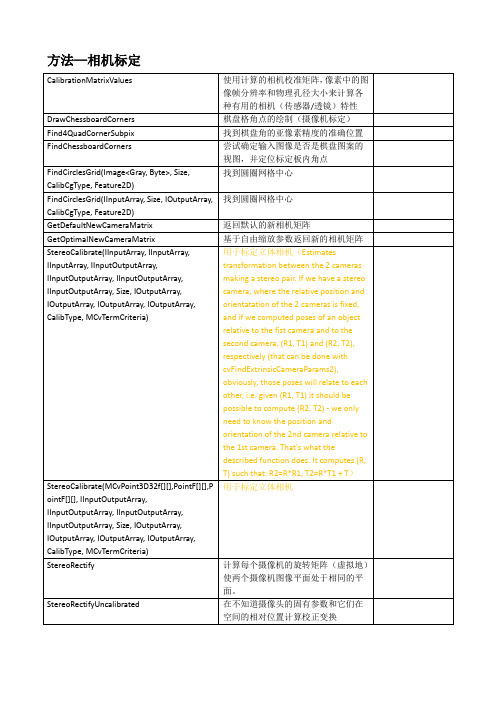
用于标定立体相机
StereoRectify
计算每个摄像机的旋转矩阵(虚拟地)使两个摄像机图像平面处于相同的平面。
StereoRectifyUncalibrated
在不知道摄像头的固有参数和它们在空间的相对位置计算校正变换
方法
CalibrateCamera(IInputArray, IInputArray, Size, IInputOutputArray, IInputOutputArray, IOutputArray, IOutputArray, CalibType, MCvTermCriteria)
cvGetRawData
以低级别信息填充输出变量。
cvGetRow
返回头文件信息,对应于输入数组的指定行。
cvGetRows
返回头文件信息,对应输入数组的指定行跨度。
cvGetSubRect
返回头文件,对应于输入数组的指定矩形。换句话说,它允许用户将输入阵列的一部分视为独立阵列。通过还可提取ROI的子阵列。
计算源数据的加权平均和,使得acc变为帧序列的运行平均值(Calculates weighted sum of input src and the accumulator acc so that acc becomes a running average of frame sequence: acc(x,y)=(1-alpha) * acc(x,y) + alpha * image(x,y) if mask(x,y)!=0 where alpha regulates update speed (how fastaccumulator forgets about previous frames).
opencv 曲线检测算法

opencv 曲线检测算法在 OpenCV 中,可以使用霍夫变换(Hough Transform)来进行曲线检测。
霍夫变换是一种在图像中检测几何形状(如直线、圆、椭圆等)的常用技术。
下面是一个简单的示例,演示如何使用霍夫变换进行曲线(直线)检测。
import cv2import numpy as np# 读取图像image = cv2.imread('your_image_path.jpg')# 将图像转换为灰度gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 使用Canny边缘检测进行预处理edges = cv2.Canny(gray, 50, 150, apertureSize=3)# 使用霍夫变换检测直线lines = cv2.HoughLines(edges, 1, np.pi / 180, threshold=100)# 在原始图像上绘制检测到的直线for line in lines:rho, theta = line[0]a = np.cos(theta)b = np.sin(theta)x0 = a * rhoy0 = b * rhox1 = int(x0 + 1000 * (-b))y1 = int(y0 + 1000 * (a))x2 = int(x0 - 1000 * (-b))y2 = int(y0 - 1000 * (a))cv2.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2)# 显示结果cv2.imshow('Detected Lines', image)cv2.waitKey(0)cv2.destroyAllWindows()在上述示例中,cv2.HoughLines 函数用于检测图像中的直线。
threshold 参数指定了霍夫变换的阈值,用于确定直线的检测程度。
相机模型与标定(十二)--opencv圆形标志点检测算法
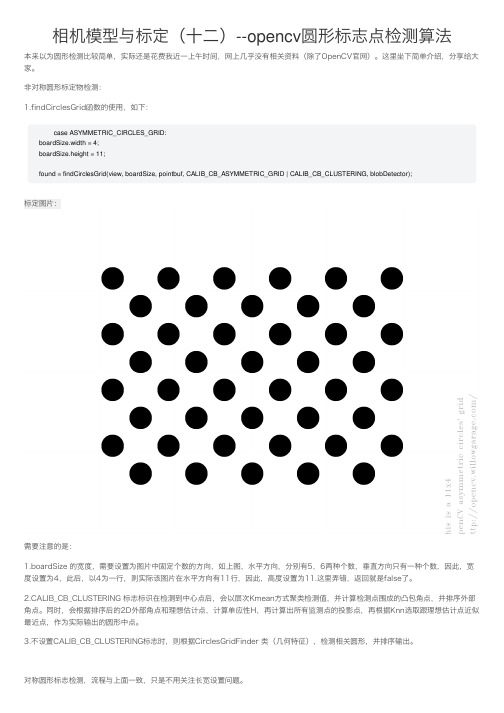
相机模型与标定(⼗⼆)--opencv圆形标志点检测算法本来以为圆形检测⽐较简单,实际还是花费我近⼀上午时间,⽹上⼏乎没有相关资料(除了OpenCV官⽹)。
这⾥坐下简单介绍,分享给⼤家。
⾮对称圆形标定物检测:1.findCirclesGrid函数的使⽤,如下:case ASYMMETRIC_CIRCLES_GRID:boardSize.width = 4;boardSize.height = 11;found = findCirclesGrid(view, boardSize, pointbuf, CALIB_CB_ASYMMETRIC_GRID | CALIB_CB_CLUSTERING, blobDetector);标定图⽚:需要注意的是:1.boardSize 的宽度,需要设置为图⽚中固定个数的⽅向,如上图,⽔平⽅向,分别有5,6两种个数,垂直⽅向只有⼀种个数,因此,宽度设置为4,此后,以4为⼀⾏,则实际该图⽚在⽔平⽅向有11⾏,因此,⾼度设置为11.这⾥弄错,返回就是false了。
2.CALIB_CB_CLUSTERING 标志标识在检测到中⼼点后,会以层次Kmean⽅式聚类检测值,并计算检测点围成的凸包⾓点,并排序外部⾓点。
同时,会根据排序后的2D外部⾓点和理想估计点,计算单应性H,再计算出所有监测点的投影点,再根据Knn选取跟理想估计点近似最近点,作为实际输出的圆形中点。
3.不设置CALIB_CB_CLUSTERING标志时,则根据CirclesGridFinder 类(⼏何特征),检测相关圆形,并排序输出。
对称圆形标志检测,流程与上⾯⼀致,只是不⽤关注长宽设置问题。
实际上,主要思路在于利⽤简单斑点检测器,检测出圆形后,做后续的相关过滤,排序,确认等操作。
opencv hough找圆算法
opencv中的Hough变换是一种常用的图像处理算法,它可以用来检测图像中的圆形。
在本文中,将介绍如何使用opencv的Hough变换算法来找到图像中的圆。
1. 算法原理Hough变换是一种常用的图像处理算法,它可以用来检测图像中的直线、圆形等几何形状。
Hough变换的原理是将图像空间中的像素点映射到参数空间中,从而能够在参数空间中找到拟合图像中特定几何形状的参数。
对于找圆算法来说,Hough变换的参数空间通常是圆心坐标和半径。
具体而言,对于一幅图像,我们需要在参数空间中建立一个累加器数组,数组的每一个元素表示一个可能的圆心坐标和半径。
然后对图像中的每一个像素点,我们计算它到每一个可能的圆心的距离,如果距离小于某个阈值,则在累加器数组中相应的位置加一。
我们就可以在累加器数组中找到累加值最大的位置,从而得到图像中的圆。
2. opencv中的实现在opencv中,我们可以使用HoughCircles函数来实现找圆算法。
该函数原型如下:void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1=100, double param2=100, int minRadius=0, int maxRadius=0 )其中,InputArray表示输入图像,OutputArray表示输出的圆的参数,method表示检测方法,dp表示累加器分辨率和图像分辨率的比值,minDist表示检测到的圆之间的最小距离,param1和param2分别表示Canny边缘检测的两个阈值,minRadius和maxRadius表示圆的最小半径和最大半径。
使用HoughCircles函数,我们可以简单地找到图像中的圆。
下面是一个示例代码:Mat src = imread("circle.jpg");Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);GaussianBlur(gray, gray, Size(9, 9), 2, 2);vector<Vec3f> circles;HoughCircles(gray, circles, HOUGH_GRADIENT, 1, gray.rows / 8, 200, 100, 0, 0);在这段示例代码中,我们首先读入一张图像,并将其转换为灰度图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
opencv找圆算法
OpenCV中寻找圆的算法有很多,以下是其中两种常见的方法:
- 大律算法otsu:通过阈值分割找到图像中的轮廓,计算每个连通域的均值中心,求出连通域半径的平均值,并计算相似度,即最小半径除以最大半径。
最后,根据相似度阈值和半径阈值判断是否为圆。
- HoughCircle:这是OpenCV中一种经典的找圆算法,通过在图像中检测出圆的候选点,并根据这些候选点的特性和约束条件,筛选出图像中的圆。
该算法可以在不同的图像和场景中找到不同大小和位置的圆。
在实际应用中,你可以根据具体需求和图像特点选择适合的找圆算法。
如果你对算法的具体实现有疑问,可以参考OpenCV的官方文档或相关教程。