OPENCV实现C++的OTSU自适应阈值分割的算法描述
otsu阈值分割

otsu阈值分割Otsu阈值分割是一种基于图像的自动阈值选择算法,用于将图像分割成前景和背景两部分。
该分割方法可以有效地抑制不同灰度级的像素混合,并克服Kittler阈值分割算法存在的一些缺点。
二、阈值分割原理1. 什么是阈值分割?阈值分割是一种图像处理算法,用于将一幅图像中的像素分割成前景和背景两部分,以便更容易对图像进行分析。
2. 如何选择阈值?选择阈值的方法有很多种,主要有:经验法:根据对图像的实际感知,经验地确定最佳的阈值。
用户设定法:根据用户的需求,设定一个阈值来分割图像。
自动阈值选择法:根据图像的直方图和其他信息,自动选择一个最佳的阈值。
三、Otsu阈值分割Otsu阈值分割是一种自动阈值选择算法,它可以根据图像的灰度直方图和其他信息,自动选择一个最佳的阈值进行分割。
它是为了克服Kittler阈值分割算法存在的一些缺点而发明的。
1. Otsu阈值分割的基本原理Otsu阈值分割的目标是寻找一个使两个灰度级的像素混合最小的阈值。
因此,它的基本原理如下:(1)假定图像只有两个灰度级,即前景和背景;(2)计算图像的灰度直方图,分别计算前景和背景像素的期望;(3)遍历每一个阈值,计算前景和背景两个灰度级的标准差;(4)计算前景和背景两个灰度级的混合,并取最小值;(5)得到的最小值就是最优阈值。
2. Otsu阈值分割的优势与Kittler阈值分割算法相比,Otsu阈值分割算法有以下优势:减少噪声:Otsu阈值分割算法可以有效地抑制不同灰度级的像素混合,从而更好地抑制噪声;提高分割准确度:Otsu阈值分割算法可以根据图像的灰度直方图,自动选择一个最佳的阈值,从而提高分割准确度;支持多种分割方式:Otsu阈值分割算法不仅可以支持二值分割,还可以支持多值分割,甚至可以使用多个阈值进行多次分割。
四、总结Otsu阈值分割是一种自动阈值选择算法,它可以根据图像的灰度直方图和其他信息,自动选择一个最佳的阈值进行分割。
c++ opencv阈值的方法

文章标题:探寻C++ OpenCV图像处理中的阈值方法在C++ OpenCV中,图像处理的阈值方法是一个十分重要的技术,它可以对图像进行二值化处理,将图像中的目标对象和背景进行有效分割,为后续的图像识别和分析提供了基础。
本文将深入探讨C++ OpenCV中常用的阈值方法,以帮助读者更好地理解和运用这一技术。
1. 了解阈值的概念阈值处理是一种图像分割方法,通过对图像灰度值进行处理,将像素分为目标和背景两部分。
在C++ OpenCV中,常用的阈值方法包括全局阈值、自适应阈值和Otsu阈值等。
通过对比不同的阈值方法,我们可以更好地选择适合特定场景的阈值处理方案。
2. 全局阈值的应用全局阈值是最简单直观的阈值处理方法,在C++ OpenCV中可以使用cv::threshold函数进行实现。
通过设定一个全局固定的阈值,对整个图像进行二值化处理,将灰度值大于阈值的像素设为白色,小于阈值的像素设为黑色。
然而,在实际应用中,全局阈值可能对光照不均匀或者对比度较低的图像效果不佳,因此需要寻求更加灵活的阈值方法。
3. 自适应阈值的优势C++ OpenCV提供了自适应阈值方法,通过计算局部区域的灰度均值或加权平均值来确定阈值,有效应对了图像光照不均匀的情况。
自适应阈值方法使得图像的二值化处理更加灵活,可以适应不同光照条件下的图像处理需求。
4. Otsu阈值的特殊性Otsu阈值是一种自动确定阈值的方法,它能够根据图像的灰度分布特点,自动计算最佳阈值,进而实现图像的自适应二值化处理。
在C++ OpenCV中,Otsu阈值的应用需要结合cv::threshold函数进行实现,通过该方法,图像处理的效果更加准确和稳定。
总结与展望通过本文的探讨,我们对C++ OpenCV中阈值处理的方法有了更深入的了解。
在实际应用中,我们可以根据图像的特点和处理需求,选择合适的阈值处理方法,以实现图像的有效分割和处理。
未来,随着图像处理技术的不断发展,我们可以进一步探索更加高效和智能的阈值方法,为图像处理领域注入新的活力和可能性。
opencv函数threshold、adaptiveThreshold、Otsu二值化的实现
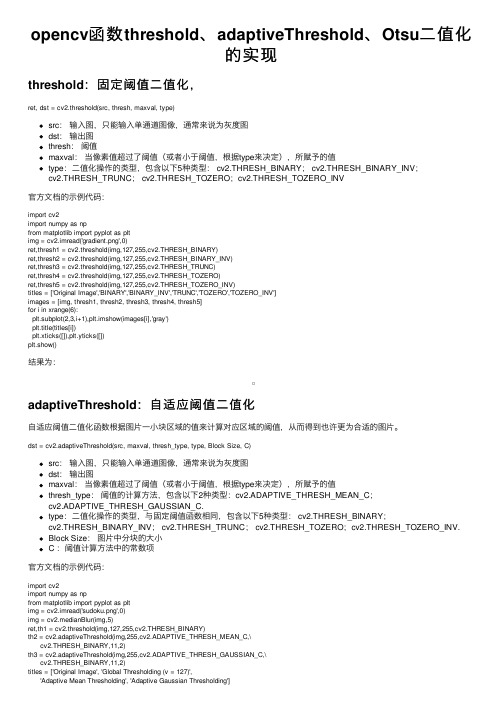
opencv函数threshold、adaptiveThreshold、Otsu⼆值化的实现threshold:固定阈值⼆值化,ret, dst = cv2.threshold(src, thresh, maxval, type)src:输⼊图,只能输⼊单通道图像,通常来说为灰度图dst:输出图thresh:阈值maxval:当像素值超过了阈值(或者⼩于阈值,根据type来决定),所赋予的值type:⼆值化操作的类型,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV;cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV官⽅⽂档的⽰例代码:import cv2import numpy as npfrom matplotlib import pyplot as pltimg = cv2.imread('gradient.png',0)ret,thresh1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]for i in xrange(6):plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')plt.title(titles[i])plt.xticks([]),plt.yticks([])plt.show()结果为:adaptiveThreshold:⾃适应阈值⼆值化⾃适应阈值⼆值化函数根据图⽚⼀⼩块区域的值来计算对应区域的阈值,从⽽得到也许更为合适的图⽚。
阈值分割-最大类间方差法(OTSU)

最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津法,简称OTSU。
它是按图像的灰度特性,将图像分成背景和目标两部分。
背景和目标之间的类间方差越大,说明构成图像的两部分的差别越大, 当部分目标错分为背景或部分背景错分为目标都会导致两部分差别变小。
因此,使类间方差最大的分割意味着错分概率最小。
function ostu,filequeryStatus = QUERY_IMAGE(file, fileInfo)if queryStatus eq 0 then beginResult = DIALOG_MESSAGE('图像格式不可识别!',/error,title='警告') return,0endifif (fileInfo.CHANNELS ne 1) then beginResult = DIALOG_MESSAGE('图像格式必须为8bit',/error,title='警告') return,0endifimgSize = fileInfo.dimensionsimg=READ_IMAGE(file)p=HISTOGRAM(img)p=p/(imgSize[0]*imgSize[1]*1.0)D=0.0T0=0 ;阈值for T=0,255 do beginp0=0.0 & m0=0for i=0,T do beginp0=p0+p[i]m0=m0+i*p[i]endform0=m0/p0p1=0.0 & m1=0for i=T+1,255 do beginp1=p1+p[i]m1=m1+i*p[i]endform1=m1/p1m=p0*m0+p1*m1D01=p0*(m0-m)^2+p1*(m1-m)^2if (D lt D01) then beginD=D01T0=Tendifendforprint,'ostu法阈值:'+strtrim(T0,2)img [WHERE (img le T0)] = 0img [WHERE (img gt T0)] = 255return, imgend;--------------------pro ostu_test,imagefileDEVICE, DECOMPOSED=1; 获取本程序所在文件路径RootDir = Sourceroot()if n_elements(imagefile) eq 0 then imagefile='man' file=RootDir+imagefile+'.bmp'imgSize = fileInfo.dimensionsimg=READ_IMAGE(file)ostuimg=ostu(file)WINDOW, /free, XSIZE = imgSize[0], YSIZE = imgSize[1] TV, imgend。
opencv阈值实现原理
opencv阈值实现原理
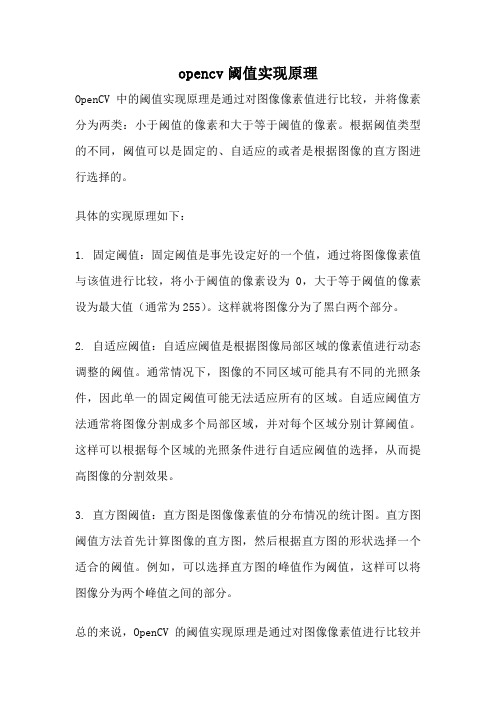
OpenCV中的阈值实现原理是通过对图像像素值进行比较,并将像素分为两类:小于阈值的像素和大于等于阈值的像素。
根据阈值类型的不同,阈值可以是固定的、自适应的或者是根据图像的直方图进行选择的。
具体的实现原理如下:
1. 固定阈值:固定阈值是事先设定好的一个值,通过将图像像素值与该值进行比较,将小于阈值的像素设为0,大于等于阈值的像素设为最大值(通常为255)。
这样就将图像分为了黑白两个部分。
2. 自适应阈值:自适应阈值是根据图像局部区域的像素值进行动态调整的阈值。
通常情况下,图像的不同区域可能具有不同的光照条件,因此单一的固定阈值可能无法适应所有的区域。
自适应阈值方法通常将图像分割成多个局部区域,并对每个区域分别计算阈值。
这样可以根据每个区域的光照条件进行自适应阈值的选择,从而提高图像的分割效果。
3. 直方图阈值:直方图是图像像素值的分布情况的统计图。
直方图阈值方法首先计算图像的直方图,然后根据直方图的形状选择一个适合的阈值。
例如,可以选择直方图的峰值作为阈值,这样可以将图像分为两个峰值之间的部分。
总的来说,OpenCV的阈值实现原理是通过对图像像素值进行比较并
分割图像,以便进行后续的图像处理操作。
不同的阈值方法可以适应不同的光照条件和图像特点,从而提高图像处理的效果。
二维Otsu算法实现-C+Opencv语言版

int width = pGrayMat->cols;
int N = height*width; //总像素数
int i, j;
for(i = 0; i < 256; i++)
{
for(j = 0; j < 256; j++)
}
}
for(i = 0; i < 256; i++)
{
for(j = 0; j < 256; j++)
{
W0 += dHistogram[i][j];
dData1 += i*dHistogram[i][j];
* 函数说明:实现灰度图的二值化分割——最大类间方差法(二维Otsu算法)
* 备注:在构建二维直方图的时候,采用灰度点的3*3邻域均值
******************************************************************************/
for(int m = i-1; m <= i+1; m++)
{
for(int n = j-1; n <= j+1; n++)
{
if((m >= 0) && (m < height) && (n >= 0) && (n < width))
【转】七种常见阈值分割代码(Otsu、最大熵、迭代法、自适应阀值、手动、迭代法、基本全局阈值法)
【转】七种常见阈值分割代码(Otsu、最⼤熵、迭代法、⾃适应阀值、⼿动、迭代法、基本全局阈值法)⼀、⼯具:VC+OpenCV⼆、语⾔:C++三、原理otsu法(最⼤类间⽅差法,有时也称之为⼤津算法)使⽤的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最⼤,每个部分之间的灰度差异最⼩,通过⽅差的计算来寻找⼀个合适的灰度级别来划分。
所以可以在⼆值化的时候采⽤otsu 算法来⾃动选取阈值进⾏⼆值化。
otsu算法被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对⽐度的影响。
因此,使类间⽅差最⼤的分割意味着错分概率最⼩。
设t为设定的阈值。
wo:分开后前景像素点数占图像的⽐例uo:分开后前景像素点的平均灰度w1:分开后被景像素点数占图像的⽐例u1:分开后被景像素点的平均灰度u=w0*u0 + w1*u1 :图像总平均灰度从L个灰度级遍历t,使得t为某个值的时候,前景和背景的⽅差最⼤,则这个 t 值便是我们要求得的阈值。
其中,⽅差的计算公式如下:g=wo * (uo - u) * (uo - u) + w1 * (u1 - u) * (u1 - u)[ 此公式计算量较⼤,可以采⽤: g = wo * w1 * (uo - u1) * (uo - u1) ]由于otsu算法是对图像的灰度级进⾏聚类,so 在执⾏otsu算法之前,需要计算该图像的灰度直⽅图。
迭代法原理:迭代选择法是⾸先猜测⼀个初始阈值,然后再通过对图像的多趟计算对阈值进⾏改进的过程。
重复地对图像进⾏阈值操作,将图像分割为对象类和背景类,然后来利⽤每⼀个类中的灰阶级别对阈值进⾏改进。
图像阈值分割---迭代算法1 .处理流程:1.为全局阈值选择⼀个初始估计值T(图像的平均灰度)。
2.⽤T分割图像。
产⽣两组像素:G1有灰度值⼤于T的像素组成,G2有⼩于等于T像素组成。
3.计算G1和G2像素的平均灰度值m1和m2;4.计算⼀个新的阈值:T = (m1 + m2) / 2;5.重复步骤2和4,直到连续迭代中的T值间的差⼩于⼀个预定义参数为⽌。
opencv实现c++的otsu自适应阈值分割的算法描述
otsu算法选择使类间方差最大的灰度值为阈值,具有很好的效果算法具体描述见otsu论文,或冈萨雷斯著名的数字图像处理那本书这里给出程序流程:1、计算直方图并归一化histogram2、计算图像灰度均值avgValue.3、计算直方图的零阶w[i]和一级矩u[i]4、计算并找到最大的类间方差(between-class variance)variance[i]=(avgValue*w[i]-u[i])*(avgValue*w[i]-u[i])/(w[i]*(1-w[i]))对应此最大方差的灰度值即为要找的阈值5、用找到的阈值二值化图像我在代码中做了一些优化,所以算法描述的某些地方跟程序并不一致otsu代码,先找阈值,继而二值化// implementation of otsu algorithm// author: onezeros(@)// reference: Rafael C. Gonzalez. Digital Image Processing Using MATLAB void cvThresholdOtsu(IplImage* src, IplImage* dst){int height=src->height;int width=src->width;//histogramfloat histogram[256]= {0};for(int i=0; i<height; i++){unsigned char* p=(unsigned char*)src->imageData+src->widthStep*i;for(int j=0; j<width; j++){histogram[*p++]++;}}//normalize histogramint size=height*width;for(int i=0; i<256; i++){histogram[i]=histogram[i]/size;}//average pixel valuefloat avgValue=0;for(int i=0; i<256; i++){avgValue+=i*histogram[i];}int threshold;float maxVariance=0;float w=0,u=0;for(int i=0; i<256; i++){w+=histogram[i];u+=i*histogram[i];float t=avgValue*w-u;float variance=t*t/(w*(1-w));if(variance>maxVariance){maxVariance=variance;threshold=i;}}cvThreshold(src,dst,threshold,255,CV_THRESH_BINARY);}更多情况下我们并不需要对每一帧都是用otsu寻找阈值,于是可以先找到阈值,然后用找到的阈值处理后面的图像。
opencv阈值处理--threshold函数、自适应阈值处理、Otsu处理(大津法)
opencv阈值处理--threshold函数、⾃适应阈值处理、Otsu处理(⼤津法)threshold函数retval, dst = cv2.threshold(src, thresh, maxval, type)'''retval:返回的阈值;dst:阈值分割结果图像src:输⼊图像thresh:阈值;maxval:需设定的最⼤值type:阈值分割类型'''简单的阈值分割类型有:cv.THRESH_BINARYcv.THRESH_BINARY_INVcv.THRESH_TRUNCcv.THRESH_TOZEROcv.THRESH_TOZERO_INV1import matplotlib.pyplot as plt2import numpy as np3import cv2 as cv45 img = cv.imread(r'Lena.png')6 imgray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)7 t1, rst1 = cv.threshold(imgray,127,255,cv.THRESH_BINARY) # ⼆值化阈值处理。
⼤于127的像素点会被处理为255,其余处理为08 t2, rst2 = cv.threshold(imgray,127,255,cv.THRESH_BINARY_INV) # 反⼆值化阈值处理。
灰度值⼤于127的像素点处理为0,其余为2559 t3, rst3 = cv.threshold(imgray,127,255,cv.THRESH_TRUNC) # 截断阈值化处理。
⼤于127的像素点处理为127,其余保持不变10 t4, rst4 = cv.threshold(imgray,127,255,cv.THRESH_TOZERO_INV) # 超阈值零处理。
⼤于127的像素点处理为0,其余保持不变11 t5, rst5 = cv.threshold(imgray,127,255,cv.THRESH_TOZERO) # 低阈值零处理。
otsu阈值分割
otsu阈值分割阈值分割是一种基于灰度模型的图像分割方法,它可以将图像分割为两个部分,一般情况下,背景被认为是一个灰度值低的区域,而目标则是一个灰度值高的区域。
此外,阈值分割也可以用于有多个对象的图像,这时,我们可以对每个对象定义一个灰度值的阈值,以根据灰度值将图像分割为不同的区域,而Otsu阈值分割则是一种比较经典的阈值分割方法,它有以下几个特点:(1)Otsu的阈值分割是自适应的。
它可以自动根据图像的直方图进行阈值分割,无需手动设置阈值;(2)Otsu的阈值分割是最优的。
它可以使图像分割出的二值图有最小的类间方差,这是一个很好的度量指标;(3)Otsu的阈值分割是实时可用的,可以非常快速地将图像分割为二值图;(4)Otsu的阈值分割方法简单易行,经过简单的统计分析,就可以找到最佳的阈值。
2、Otsu阈值分割Otsu阈值分割旨在自动检测最佳二值化阈值,其基本思想是:用信息变差法寻找最佳阈值,将灰度值划分为两类,使类间方差的和最大。
类间方差的和即类间变差熵,用下式表示其中,P(ω)表示灰度级ω的像素的概率,μ0和μ1表示分别在灰度级ω0和ω1后的类均值,而μ表示整幅图像的均值。
由于我们的目标是找到最大信息熵,那么我们只需要将阈值等于使类间变差熵最大的灰度级ω即可,可以将灰度级ω0~ω1这个范围划分为N个灰度级,然后计算每一个灰度级的类间变差熵,并找到使类间变差熵最大的灰度级,就是最佳阈值。
3、实验结果实验采用MATLAB来实现,实验的图像来自于标准的Lena 图像(512*512),使用Otsu阈值分割方法将其分割为黑白两部分,实验结果如下图所示:实验结果:经过Otsu阈值分割,我们得出的最佳阈值为114,可以将图像分割为黑白两部分,分割效果良好。
总结Otsu阈值分割是一种比较经典的阈值分割方法,有很多优秀的特点,在实际应用中有着非常重要的地位,它可以自动找到最佳的阈值,将图像分割为黑白两部分,有效提取图像中的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
return 0; } #include <cv.h> #include <cxcore.h> #include <highgui.h> #pragma comment(lib,"cv210d.lib") #pragma comment(lib,"cxcore210d.lib") #pragma comment(lib,"highgui210d.lib") #include <iostream> using namespace std; int main(int argc, char** argv) { #ifdef VIDEO //video process
for(int j=0; j<width; j++) {
histogram[*p++]++; } } //normalize histogram int size=height*width; for(int i=0; i<256; i++) { histogram[i]=histogram[i]/size; }
//average pixel value
float avgValue=0; for(int i=0; i<256; i++) {
avgValue+=i*histogram[i]; }
int threshold; float maxVariance=0; float w=0,u=0; for(int i=0; i<256; i++) {
int height=src->height; int width=src->width;
//histogram float histogram[256]= {0}; for(int i=0; i<height; i++) {
unsigned char* p=(unsigned char*)src->imageData+src->widthStep*i;
w+=histogram[i]; u+=i*histogram[i];
float t=avgValue*w-u; float variance=t*t/(w*(1-w)); if(variance>maxVariance) {
maxVariance=variance; threshold=i; } }
//average pixel value float avgValue=0; for(int i=0; i<256; i++) {
avgValue+=i*histogram[i]; }
int threshold; float maxVariance=0; float w=0,u=0; for(int i=0; i<256; i++) {
cvShowImage("object",imgCb); cvReleaseImage(&imgCb); if (cvWaitKey(3)==27) //esc {
break; } } cvReleaseCapture(&capture);
#else //single image process const char* filename=(argc>=2?argv[1]:"cr.jpg"); IplImage* img=cvLoadImage(filename,CV_LOAD_IMAGE_GRAYSCALE); cvThresholdOtsu(img,img); cvShowImage( "src", img ); char buf[256]; sprintf_s(buf,256,"%s.otsu.jpg",filename); cvSaveImage(buf,img); cvErode(img,img); cvDilate(img,img); cvShowImage( "dst", img ); sprintf_s(buf,256,"%s.otsu.processed.jpg",filename); cvSaveImage(buf,img); cvWaitKey(0);
w+=histogram[i]; u+=i*histogram[i];
float t=avgValue*w-u; float variance=t*t/(w*(1-w)); if(variance>maxVariance)
{ maxVariance=variance; threshold=i;
} }
#endif
return 0; }
threshold=cvThresholdOtsu(imgCb); } //cvThresholdOtsu(imgCb,imgCb); cvThreshold(imgCb,imgCb,threshold,255,CV_THRESH_BINARY); cvErode(imgCb,imgCb); cvDilate(imgCb,imgCb);
cout<<"failed to open camera"<<endl; exit(0); }
int threshold=-1; IplImage* img; while (img=cvQueryFrame(capture))
{ cvShowImage("video",img); cvCvtColor(img,img,CV_RGB2YCrCb);
int height=src->height; int width=src->width;
//histogram float histogram[256]= {0}; for(int i=0; i<height; i++) {
unsigned char* p=(unsigned char*)src->imageData+src->widthStep*i;
CvCapture* capture=cvCreateCameraCapture(-1); if (!capture) {
cout<<"failed to open camera"<<endl; exit(0); } int threshold=-1; IplImage* img; while (img=cvQueryFrame(capture)) { cvShowImage("video",img); cvCvtColor(img,img,CV_RGB2YCrCb); IplImage* imgCb=cvCreateImage(cvGetSize(img),8,1); cvSplit(img,NULL,NULL,imgCb,NULL); if (threshold<0) {
return threshold; }
我在手的自动检测中使用这个方法,效果很好。 下面是使用上述两个函数的简单的主程序,可以试运行一下,如果处理视频,要 保证第一帧时,手要在图像中。
#include <cv.h> #include <cxcore.h> #include <highgui.h> #pragma comment(lib,"cv210d.lib") #pragma comment(lib,"cxcore210d.lib") #pragma comment(lib,"highgui210d.lib")
#include <iostream> using namespace std;
int main(int argc, char** argv) { #ifdef VIDEO //video process
CvCapture* capture=cvCreateCameraCapture(-1); if (!capture) {
cvShowImage("object",imgCb); cvReleaseImage(&imgCb);
if (cvWaitKey(3)==27) //esc {
break; } }
cvReleaseCapture(&capture);
#else //single image process const char* filename=(argc>=2?argv[1]:"cr.jpg"); IplImage* img=cvLoadImage(filename,CV_LOAD_IMAGE_GRAYSCALE);
for(int j=0; j<width; j++) {
histogram[*p++]++; } } //normalize histogram int size=height*width; for(int i=0; i<256; i++) { histogram[i]=histogram[i]/size; }
cvThreshold(src,dst,threshold,255,CV_THRESH_BINARY); }
更多情况下我们并不需要对每一帧都是用 otsu 寻找阈值,于是可以先找到阈值, 然后用找到的阈值处理后面的图像。下面这个函数重载了上面的,返回值就是阈 值。只做了一点改变
// implementation of otsu algorithm // author: onezeros(@) // reference: Rafael C. Gonzalez. Digital Image Processing Using MATLAB int cvThresholdOtsu(IplImage* src) {