压电陶瓷微位移驱动器概述
新型压电陶瓷驱动器的特性分析
1.1 压 电 材 料 的 压 电 效 应 及 其 本 构 关 系 压电材料是一种特殊的弹性体,除了 具 备 普 通 介 质 材 料
所具备的介 电 性 质 和 弹 性 性 质 外,更 主 要 的 是 具 有 压 电 效
应。利用压电陶瓷材料作为驱动装置主要是利用其逆压电
与电能进行相互转换时的数量关系。假设使用的材料为线
性 压 电 材 料 ,则 其 本 构 关 系 的 表 达 式 为 :
εi =siEuσu +dijEi
(1)
Di =diuσu +∈iσjEj
(2)
式 中:εi 为应变;siEu 为电场强度为E 时的短路弹性柔顺系数,
m2/N;σu 为 应 力;Di 为 电 位 移;dij 和diu 为 压 电 应 变 常 数, m/V;Ei 和Ej 为电场强度;∈iσj 为 当 应 力 为 常 数 时 的 介 电 系 数,F/m。式(1)和式(2)表 明 压 电 材 料 的 应 变 和 电 位 移 均 是
效应,即通过对压 电 陶 瓷 (PZT)施 加 外 部 电 场,将 输 入 的 电
能转换成机械能 以 改 变 结 构 阻 尼、刚 度 等 特 性,从 而 对 结 构
进行有效控制 。 [2]
压电效应反映了晶体弹性与介电性 之 间 的 耦 合 作 用,而
压电材料力电耦合的本构关系则反映了压电材料将机械能
新 型 压 电 陶 瓷 驱 动 器 的 特 性 分 析/王 社 良 等
· 153 ·
新型压电陶瓷驱动器的特性分析*
王 社 良 ,刘 敏 ,樊 禹 江
(西安建筑科技大学土木工程学院,西安 710055)
摘要 讨论了一种基于压电陶瓷的新型叠堆驱动器,并阐述了其工作原理,推导出该驱动 器 的 力 学 性 能 公 式。 基于压电陶瓷材料的机电耦合特性,运用 ANSYS 有限元软件对此驱动器进行了数 值 分 析,研 究 了 其 驱 动 性 能,分 析 结果表明,其输出位移和输出力均与输入电压呈线性关系,在较低电压下可获得较大变形量,且具 有 良 好 的 动 态 响 应 特性。该叠堆压电驱动器结构简单、尺寸小、成本低,通过输 入 电 压 即 可 实 现 位 移 控 制 ,可 作 为 较 好 的 自 适 应 控 制 驱 动器应用于智能摩擦阻尼器的驱动装置。
压电陶瓷(PDF)
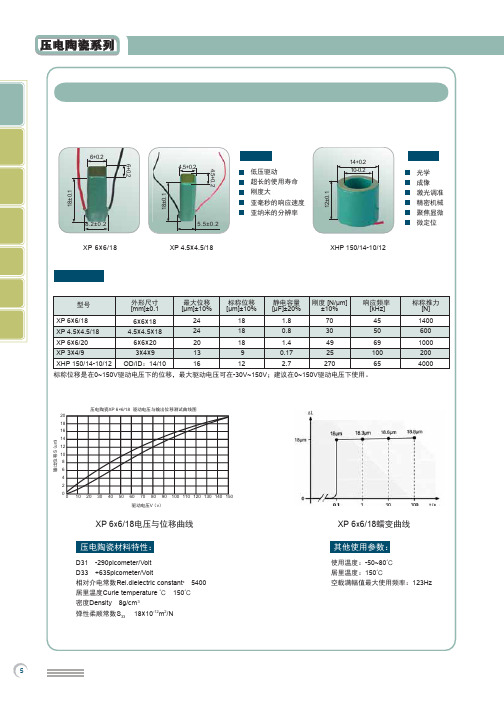
平移台系列纳米定位偏转台系列纳米定位动电源系列压电陶瓷驱微仪系列高精度测其他定制及 产品代理进口5低压驱动超长的使用寿命刚度大亚毫秒的响应速度亚纳米的分辨率光学成像激光调准精密机械聚焦显微微定位特点应用XP 6×6/18XP 4.5×4.5/18 XHP 150/14-10/12XP 6×6/18电压与位移曲线XP 6×6/18蠕变曲线D31:-290picometer/VoltD33:+635picometer/Volt相对介电常数Rel.dielectric constant ε:5400居里温度Curie temperature ℃:150℃密度Density :8g/cm 3弹性柔顺常数S 33 :18×10-12m 2/N 使用温度:-50~80℃居里温度:150℃空载满幅值最大使用频率:123HzXP 6×6/18XP 4.5×4.5/18XHP 150/14-10/12外形尺寸[mm]±0.16×6×184.5×4.5×18OD/ID :14/10 标称位移 [μm]±10%181812最大位移[μm]±10%242416静电容量[μF]±20%1.80.82.7刚度 [N/μm]±10%7030270响应频率 [kHz]455065标称推力[N]1400600 4000 型号其他使用参数:压电陶瓷材料特性:低压叠堆压电陶瓷-推荐型号术参数www.xm tkj.c o m *************X M T 芯明天科技024681012141618200102030405060708090100110120130140150S 输出位移(u m )驱动电压V (v )压电陶瓷XP 6×6/18驱动电压与输出位移测试曲线图6×6×203×4×9XP 6×6/20XP 3×4/92013 1.40.17492569100100020018 9标称位移是在0~150V 驱动电压下的位移,最大驱动电压可在-30V~150V ;建议在0~150V 驱动电压下使用。
正压电效应的应用实例

正压电效应的应用实例正压电效应是指在施加外加电场时,晶体的尺寸会发生变化的现象。
这种效应已经在许多领域得到了广泛的应用。
本文将以几个具体的应用实例来说明正压电效应的重要性。
1. 声学领域中的应用正压电效应在声学领域中有着重要的应用。
例如,许多压电陶瓷材料可以将电能转化为声能,被广泛应用于扬声器和超声波发生器中。
当施加电场时,压电陶瓷材料会发生尺寸变化,从而产生声波。
这种原理使得扬声器能够将电信号转化为声音,并在音响系统和通讯设备中得到广泛应用。
2. 压电传感器正压电效应还被广泛应用于压力传感器的制造中。
压电传感器可以将压力转化为电信号,被广泛应用于工业自动化、医疗设备和航空航天等领域。
当施加外加压力时,压电材料会产生电荷累积,从而产生电压信号。
通过测量这个电压信号的大小,可以准确地测量压力的大小。
3. 步进电机步进电机是一种特殊的电动机,其运动是通过施加电场引起的正压电效应来实现的。
步进电机的转子上通常会安装有压电材料,当施加电场时,压电材料会产生尺寸变化,从而引起转子的旋转。
步进电机由于具有高精度、高可靠性和无噪音等特点,在自动化设备、机器人和精密仪器等领域得到广泛应用。
4. 压电陶瓷驱动器正压电效应也可以应用于压电陶瓷驱动器中。
压电陶瓷驱动器是一种利用正压电效应实现精密运动控制的装置。
通过施加电场,压电陶瓷材料会发生尺寸变化,从而实现微小的位移。
这种驱动器具有快速响应、高精度和无摩擦等优点,被广泛应用于光学调焦、精密定位和自适应光学等领域。
5. 超声波清洗正压电效应也被应用于超声波清洗技术中。
超声波清洗是一种利用超声波的机械振动来清洗物体表面的技术。
在超声波清洗设备中,压电陶瓷被用作超声波发生器,当施加电场时,压电陶瓷会发生尺寸变化,产生超声波振动。
这种振动可以有效地清洗物体表面的污垢和杂质,被广泛应用于医疗器械、电子元件和珠宝等领域。
正压电效应在许多领域中都有着重要的应用。
无论是在声学领域中的扬声器和超声波发生器,还是在压力传感器、步进电机和压电陶瓷驱动器等设备中,正压电效应都发挥着重要的作用。
-结构陶瓷,功能陶瓷,压电陶瓷及应用概述
21
多层片式电感(MLCI)
叠层片式电感(又称多层片式电感MLCI)不用绕线,是 用铁氧体浆料和导体浆料交替印刷,叠层,共烧,形成具 有闭合磁路的独石结构。由于采用了先进的厚膜多层印刷 技术和叠层生产工艺,实现了超小型化, 目前已实现0402 器件的商品化。
与绕线式片式电感比,多层片式电感(MLCI)具有体积 小,重量轻,磁屏蔽特性好,可焊性和耐热性好,可靠性 高,形状规整,适于自动化高密度组装等优点,是目前片 式电感领域重点开发的产品。
ΔL
ΔL
P
E
P
E
应变S与外电场强度E成正比:
伸长 S=d*E d*是逆压电常数矩阵. 缩短
29
正压电效应与逆压电效应具有可逆性
机械能
(传感器)
正压电效应
压电 介质
测力计
电能
加速度计
换能器
微动平台
逆压电效应
(执行器)
30
压电现象和材料-- 发展历史
1880年,Jacques Curie和Pierre Curie兄弟发现α石英晶体的压电效应。 石英晶体就没有体积变形压电效应,但具有良好的厚度变形和长度变形压电效 应。
连续等静压成型
瓷帽成型
装配封接件
透明陶瓷灯管
加工
封接
封接好的电弧管
封灯
H2连续炉烧结
13
高压钠灯成品
我国城乡街道、广场机场、公路铁路、港口码头、 桥梁隧道等户外照明基本上都采用了高压钠灯
北京街道
莱州广场
襄樊铁路线
海南机场
武汉长江大桥
台州高速
青岛港
隧道
改善了城乡照明水平,提高了交通安全和行车速度
每年为国家节省数以十亿度计的照明用电
压电陶瓷ppt课件
感谢您的观看
THANKS
造传感器和换能器。
工作模式二
压电陶瓷可以在交变电场下工作, 产生交变的机械振动,用于制造超 声波设备和振动器。
工作模式三
压电陶瓷可以在高电压、大电流下 工作,产生强烈的机械振动或变形 ,用于制造大型驱动器和执行器。
03
压电陶瓷的制造工艺
配料与混合
配料
按照配方称取适量的原料,如钛 酸钡、二氧化锆、氧化镁等。
04
压电陶瓷的性能参数
电学性能
介电常数
衡量压电陶瓷在电场作用下极化 程度的物理量。介电常数越大, 极化程度越高,压电效应越明显
。
绝缘电阻
反映压电陶瓷内部绝缘性能的参 数。高绝缘电阻表明陶瓷内部缺
陷少,性能稳定。
电致伸缩系数
衡量压电陶瓷在电场作用下产生 的机械应变能力的物理量。电致 伸缩系数越大,机械应变能力越
压电陶瓷的特性
高压电性能
压电陶瓷具有较高的压电常数和机电耦合系 数,能够将微小的机械形变转换为较大的电 能或机械能。
温度稳定性
压电陶瓷具有较好的温度稳定性,可以在较 宽的温度范围内保持稳定的性能。
可靠性高
压电陶瓷具有较高的机械强度和稳定性,不 易疲劳压电陶瓷的振动和换能特性,可以将太阳能转换为电能,提高太阳能利用率 。
压电陶瓷在风能发电中的应用
压电陶瓷可以作为风能发电机的传感器和换能器,实现风能的高效利用。
压电陶瓷在其他领域的应用探索
压电陶瓷在医疗领域的应用
压电陶瓷在医学领域具有广泛的应用前景,如超声成像、药物传递等。
压电陶瓷在环保领域的应用
利用压电陶瓷的振动特性,制造出声 波发生器、超声波探头等声学器件。
压电陶瓷 最大输出位移

压电陶瓷最大输出位移1. 引言1.1 压电陶瓷概述压电陶瓷是一种具有压电效应的陶瓷材料,具有压电效应的陶瓷材料称为压电陶瓷。
压电效应是指某些晶体在受到机械应力或电场刺激时会发生形变或电极化现象。
压电陶瓷具有较高的机械强度、良好的化学稳定性和优良的压电性能,因此被广泛应用于传感器、马达、换能器等领域。
压电陶瓷具有多种规格和型号,可以根据具体的应用需求选择不同的压电陶瓷材料。
在工程领域中,压电陶瓷扮演着重要的角色,其在传感、控制、信号处理等方面都有广泛的应用。
随着科技的不断进步,压电陶瓷的性能和应用领域也在不断扩展和提升。
压电陶瓷是一种具有特殊性能和广泛应用前景的陶瓷材料,其在现代工程中具有重要地位,对于促进科技进步和社会发展具有重要意义。
1.2 压电效应简介压电效应是指在受到外力作用时,物质会产生电荷的分离或聚集,并在晶格结构内部产生电场的现象。
这种效应是由于压电材料的晶格结构具有非中心对称性,因此在受到应力变化时会产生极化现象。
压电效应是压电陶瓷的重要特性之一,也是其广泛应用的基础。
当外界施加压力或扭曲时,压电陶瓷会发生极化现象,即产生正负电荷的分离。
这种极化效应会导致压电陶瓷内部产生电场,从而使其表现出压电性质。
压电效应不仅可以实现电能到机械能的转换,还可以实现相反的机械到电的能量转换。
这种双向转换能力使得压电陶瓷在传感器、执行器等领域具有广泛的应用前景。
压电效应是压电陶瓷材料独特的物理现象之一,其在实际应用中能够为工程领域提供稳定可靠的解决方案,具有重要的意义和价值。
压电效应的简介将有助于深入了解压电陶瓷的特性和应用前景。
2. 正文2.1 压电陶瓷的结构和工作原理压电陶瓷是一种具有压电效应的材料,其结构和工作原理对于理解其性能和应用至关重要。
压电陶瓷通常由铅锆钛酸钠、铅镁铌酸、铅钛锆酸钡等材料构成,具有特殊的晶体结构。
在外加电场的作用下,压电陶瓷会发生形变,从而产生电荷,实现能量的转化与传递。
基于柔性铰链的微位移设计
第一章绪论1.1 柔性铰链简介1.1.1 柔性铰链定义柔性铰链作为一种小体积、无机械摩擦、无间隙和运动灵敏度高的传动结构,被广泛应用于各种要求微小线位移或角位移、且高精度定位的场合。
开创了工作台进入毫米级的新时代。
柔性铰链有成千上万的应用,如:陀螺仪、加速度计、天平、控制导弹的喷嘴、控制器显示仪、记录仪、调整器、放大连杆、计算机、继电器和传动连杆。
60年代前后,由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各种类型的弹性支承实验探索后才逐步开发出体积小、无机械摩擦、无间隙的柔性铰链。
随后柔性铰链在支撑结构、联接结构、调整机构和测量仪器中的得到广泛应用,并获得了前所未有的高精度和稳定性,并日益成熟。
70年代末,美国国家标准局引入了柔性铰链机构以放大压电驱动器的位移,使其设计的工作台既具有亚纳米级的位移分辨率,又具有相对较大的行程。
近年来,柔性铰链以其特殊的性能在精密机械、精密测量、微米技术和纳米技术等领域得到广泛应用没,尤其是柔性铰链与压电致动结合实现超精密位移和定位。
柔性铰链用于绕轴作复杂的有限角位移,它的特点是:无机械摩擦、无间隙、运动灵敏度高。
柔性铰链有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
1.1.2 柔性铰链运动的实现方法柔性铰链是通过弹性形变来实现铰链运动。
施加的弹性变形力会导致铰链中心点偏移其几何中心,从而影响柔性铰链的转动精度。
柔性铰链用于绕轴做复杂运动的有限角位移,它有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
1.1.3 柔性铰链类型柔性铰链可分为单轴柔性铰链和双轴柔性铰链。
单轴柔性铰链的截面形状有圆形与矩形两种,如图1-1所示。
图1—1 单轴柔性铰链双轴柔性铰链是由两个互成90度的单轴柔性铰链组成的(如图1-2(a)),对于大部分应用,这种设计的缺点是两轴没有交叉,具有交叉的最简单的双轴柔性铰链是把颈部作成圆杆状(如图1-2(b)),这种设计简单且容易加工,但它的截面积比较小,因此纵向强度比图1-2(a)弱得多。
电压驱动型开关式压电陶瓷驱动电源的设计
电压驱动型开关式压电陶瓷驱动电源的设计导言压电陶瓷是一种能够将电能转化为机械能的材料,广泛应用于传感器、执行器和能量收集器等领域。
在很多应用中,需要将电源提供给压电陶瓷,以实现其工作。
本文将详细介绍电压驱动型开关式压电陶瓷驱动电源的设计原理、方法和注意事项,希望能够为相关领域的工程师和研究人员提供一些参考。
一、设计原理1.1 电压驱动型压电陶瓷电压驱动型压电陶瓷是一种常见的压电器件,它通过在其两端施加电压来产生机械扰动。
当施加的电压发生变化时,压电陶瓷就会发生形变,从而实现其在传感、控制等方面的应用。
为了实现对电压驱动型压电陶瓷的驱动,需要设计一种合适的电源电路。
1.2 开关式电源电路开关式电源电路是一种常用的电源设计方案,它通过开关管实现对电压的控制和调节。
在设计开关式电源电路时,需要考虑到电压稳定性、效率和频率等因素,以确保对压电陶瓷的驱动能够达到预期的效果。
二、设计方法在设计电压驱动型开关式压电陶瓷驱动电源时,首先需要确定所需的驱动电压和电流。
然后根据这些参数来选择合适的开关管、电感和电容等元件,设计出合适的电源电路结构。
在设计电源电路时,需要考虑到电压波动、电流波动和功率损耗等因素,以确保电源的输出能够满足对压电陶瓷的驱动需求。
2.2 控制电路设计除了电源电路外,还需要设计控制电路来实现对开关管的控制。
控制电路通常包括PWM控制器、反馈电路和保护电路等部分,它们共同协调工作,确保开关管能够按照预期的方式进行开关,从而实现对电压驱动型压电陶瓷的有效驱动。
2.3 整体设计在完成电源电路和控制电路的设计后,需要对整个系统进行整体设计和调试。
这包括对电源电路和控制电路进行联合调试,以确保它们能够协同工作,并输出稳定的驱动电压和电流。
在整体设计和调试过程中,需要特别关注电源的效率、稳定性和可靠性等方面的指标。
三、注意事项3.1 电源稳定性在设计电压驱动型开关式压电陶瓷驱动电源时,需要特别关注电源的稳定性。
压电陶瓷驱动电路设计
压电陶瓷驱动电路设计英文回答:Introduction.Piezoelectric ceramics are materials that exhibit the piezoelectric effect, which is the ability to generate an electrical charge in response to mechanical stress or vice versa. This effect is reversible, meaning thatpiezoelectric ceramics can also convert electrical energy into mechanical energy. Piezoelectric ceramics are used in a wide variety of applications, including sensors, actuators, and medical imaging devices.Piezoelectric Ceramic Driver Circuit Design.The design of a piezoelectric ceramic driver circuit depends on the specific application. However, there are some general considerations that apply to all piezoelectric ceramic driver circuits.The driving voltage must be high enough to generate the desired mechanical displacement. The voltage required will depend on the piezoelectric material used, the thickness of the ceramic, and the desired displacement.The driving frequency must be within the resonant frequency of the piezoelectric ceramic. The resonant frequency is the frequency at which the piezoelectric ceramic vibrates most easily. Driving the ceramic at its resonant frequency will result in the highest possible displacement.The driving current must be limited to prevent damage to the piezoelectric ceramic. The current required will depend on the driving voltage and the impedance of the piezoelectric ceramic.Circuit Topologies.There are a number of different circuit topologies that can be used to drive piezoelectric ceramics. The mostcommon topology is the voltage amplifier circuit. This circuit consists of a voltage amplifier that is connected to the piezoelectric ceramic. The voltage amplifier provides the necessary voltage to drive the piezoelectric ceramic.Other circuit topologies that can be used to drive piezoelectric ceramics include the current amplifier circuit, the power amplifier circuit, and the resonant driver circuit. The choice of circuit topology will depend on the specific application.Circuit Components.The components used in a piezoelectric ceramic driver circuit will depend on the specific circuit topology. However, some common components include:Voltage amplifiers are used to provide the necessary voltage to drive the piezoelectric ceramic.Current amplifiers are used to provide the necessarycurrent to drive the piezoelectric ceramic.Power amplifiers are used to provide both the necessary voltage and current to drive the piezoelectric ceramic.Resonant drivers are used to drive the piezoelectric ceramic at its resonant frequency.Inductors and capacitors are used to filter the output of the driver circuit.Design Considerations.When designing a piezoelectric ceramic driver circuit, it is important to consider the following factors:The desired mechanical displacement.The resonant frequency of the piezoelectric ceramic.The impedance of the piezoelectric ceramic.The available driving voltage and current.The cost and complexity of the circuit.By carefully considering all of these factors, it is possible to design a piezoelectric ceramic driver circuit that meets the specific requirements of the application.中文回答:压电陶瓷驱动电路设计。
微位移技术
对于外加控制电压,压电陶瓷相当于一个微法级 平行板电容器;每层之间粘结剂的弹性变形都对 输入输出有相当的影响所以并不是完全的平方关 系。 压电伸缩型陶瓷具有较大迟滞和蠕变、响应快和 温度对性能影响小等特点,而电致伸缩型陶瓷具 有较小的迟滞和蠕变的特点,但在响应时间及温 度对性能的影响等方面较电致伸缩型陶瓷差。
一、微位移技术介绍
微位移技术是超精密加工及检测中的一项关键 技术。
微位移技术包括:微位移机构、检测装置和控
制系统。
微位移机构 检测装置
控制系统
微位移机构:微位移机构是指行程小(一般小于
毫米级)、灵敏度和精度高(亚微米、纳微米级) 的机构。是微位移系统的核心。
检测装置:用传感器按一定规律将微位移机构
二、微位移机构
组成:微位移驱动器、微动工作台 作用:既可以作为微进给和微调节部件,也可作为工
艺系统动、静态误差补偿的关键部件。 分类: (1)直线电机式微位移机构 (2)机械传动式微位移机构 (3)扭转摩擦传动式微位移机构 (4)弹性变形传动式微位移机构 (5)压电元件与电致伸缩式微位移机构 (6)热变形式微位移机构 (7)磁致伸缩式微位移机构
微位移技术国内外的现状
随着纳米技术的地位在不断的攀升,发达国家都在纳米 技术的研究上投入了大量的资金和人力。美国国家关键技术 委员会将纳米技术列为政府重点支持的22项关键技术之一; 日本把纳米技术作为ERATO计划中6项优先高技术探索项目 之一;英国国家纳米技术(NION)计划已开始实行;欧洲的其 它国家也不示弱,把纳米技术列入了“尤里卡计划”。 美国LODTM机床上用的快速刀具伺服机构在±1. 27μm范 围内分辨率可达2. 5nm,频响可达100Hz;日本日立制作所采用 柔性支承导轨、压电驱动方式的微位移机构的位移精度为 ±0. 05μm,行程为±8μm,该机构均成功应用于电子束曝光机。 哈尔滨工业大学采用柔性支承导轨、步进电机驱动方式的微 位移机构的位移精度为±0. 05μm,分辨力为0. 01μm,行程为 20μm;国防科技大学采用柔性支承导轨形式、电致伸缩驱动 方式的微位移机构的分辨力为0. 1μm,行程为20μm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net压电陶瓷微位移驱动器概述
中科院上海硅酸盐研究所陈大任
摘要利用压电陶瓷的逆压电效应可制成徽位移驱动器对该类器件的性能特点分类应用概况压电陶瓷材料本质对该器件性能的影响材料的选择及发展趋势等方面进行了介绍
关键词压电陶瓷徽位移驱动器应用发展
卜浏
前言利用压电陶瓷的逆压电效应可方便地实现精密的位置控制或输出较大的力制成微位移驱动器近年来这类器件的研究和应用发展很迅速已在功能陶瓷中形成了一重要的分支由于位移和力是自然界和技术上最基本的两个物理量它又是一种集电子元件和结构元件于一体的新型固态器件所以该类器件已经或者即将在精密机械精密机械加工等方面获得广泛应用应用涉及到激
光通讯生物工程纳米加工自动控制机器人等高新技术领域它在国民经济中将发
挥越来越重要的作用
我国在压电微位移驱动器的研制和应用
方面均较后进且国内从事上述两方面研究
的工作者缺乏应有的相互了解与联系撰写此文希望在材料器件与应用之间起一桥
梁作用以促进这类器件在我国广泛应用
压电陶瓷微位移驱动器的特点和分类压电陶瓷微位移驱动器具有一系列优点归纳如下不需传动机构位移控制精度高可达拼响应速度快约为娜无机械吻合间隙可实现电压随动式位移控
制有较大的力输出约为
功耗低比电磁马达式的微位移器低个数量级并且当使物体保持一定位置高度时器件几乎无功耗
它是一种固体器件易与电源测位传感器微机等实现闭环自控且比磁控合金和温控形状记忆合金等其它微位移器的
体
积要小得多
压电陶瓷微位移器从其应变形式而言
收稿日期© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
年月
电子元件与材料
可分为伸缩型即直线型和弯曲型两大类交变三种
进而他们又可再分成刚性和谐振性表列出了应用最广泛和较成熟的伸缩两种若从压电陶瓷微位移器型压电微位移器的分类情况典型的应用以驱动电压施加形式来看则有随动开关和及使用的压电陶瓷类型
表压电陶瓷微位移驱动器分类情况按应变和驱动电压应变类型驱动电压形式典型材料典型应
用
直线型刚性随动驱动动硬性压电陶瓷瓷精密光学干
涉仪变形
镜
〔伸缩位移或电致伸缩陶瓷精密机加工微动工作台台
开关驱动软性压电陶瓷瓷冲击式打印机头压电继电器器
尺歧形线性马达
共振型交变驱动动硬性压电陶瓷超声马达表面波体波弯曲型共振型交变驱动软性压电陶瓷压电风扇压电泵
按结构形式器件可分为简单型和复合
型
两大类其中包括片状管状多层结构和夹心式双晶片杠杆式步进式等等见图
简单型
复合型
单片式
多层式
圆管式
夹心式杠杆式
步进式
群《
不戛瑟尹
图应用于天文望远镜图像修正的压电陶瓷微位移器阵—变形镜的示意
仁簇篡》
基板
咧矍白
图压电陶瓷微位移驱动器的不同结构形式也有人从器件的应用功能将它们分为三类传感器位移传感器压力传感器动力学传感器
微孔针
微孔针夹
—】质量块
压电陶瓷微位移驱动器应用简况
该类器件的应用分作三类列于表
类为随动驱动精密位置控制在三类应用中
它的发展应用最成熟其中包括一维位置控制如精密光学干涉仪变形镜精机加工等二维控制如光刻曝光工作台生物显微镜载物台和三维控制如光纤对准扫描隧道显微镜顶针装置等由于受篇幅所限现仅对几种应用例作粗略介绍图为由一维压电微位移驱动器组成阵列构成的变形镜示意图
图压电陶瓷微操作手的示意它可根据接收光讯号自动调节镜面的形
状使夭文望远镜接收到的畸变图像得到矫
正图是一维型微机械操作手示意它可
用于生物工程等如对个别细胞内注射
纳米级加工等图为二维精控大规模集成电路光刻曝光台的示意图由于使用了高线性度的压电陶瓷微位移器实现了亚微米级的位置控制使集成度大大提高
表中类应用为脉冲驱动器件或称为压力运动传感器器械装置的应用它们一般是在第类器件基础上采用使位移或力能大幅度放大的机构如杠杆机构使微© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
表压电陶瓷微位移驱动器应用简况类别
器件或装里
应变驱动性质
应用领域
高精度光学干涉仪
双稳态光学仪
变形镜
变形光栅光偏振控制装置光纤对准光刻曝光装置
扫描隧道显微镜顶针微动机械手纳米加工高精度切割误差补偿超精密道轨
油气自动控制阀
自动跟踪系统
刚性随动
精密光学精密光学精密光学天文望远镜精密光学精密光学光通讯光通讯激光应用
大规模集成电路生物工程物质结构生物工程精密加工精机加工
精密机械精密机械自动化精密机械家电
冲击阵矩式打印机头喷墨式打印机头步进直线马达
压电继电器照相机快门
刚性脉冲
精机办公机械精机办公机械
精密光学机器人
自动化
精密机械
超声马达表面波体波超声线性马达压电风扇压电
泵
照相机自动调焦
超声手术刀
共振交变精密光学
精密机械自动化能量传递
小位移在一定时间后积累叠加的机构开发出的一系列复合式微位移器预期这类器件有着广泛的应用前途
承片台微位护多褚器
微位于器
示为一种压电型步进直线马达—尺蝮型步
进马达它可象无足的昆虫蠕动一样前进即通过“首”“尾”轮番咬住或松开基轴间
息中配合“身体”的伸缩使整个微位移器与基轴发生相对的步进运动“首”“尾”的压电陶瓷作径向收缩位移而“身体”部分作沿轴向的伸缩位移
卫乡进工作方卫
乡进工作丫方
图应用于光刻曝光机的二维压电陶瓷微位移器工作台示意图为具有杠杆放大机构的冲击式点阵型打印机头结构示意图它与传统的电动
打印机相比具有高速字符低功耗打印质量高无电磁干扰等优点图所
图冲击阵矩式压电打印机头结构示意
皿类应用是利用压电陶瓷谐振时的表面© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
年月
电子元件与材料
波效应或体波的驻波作用而制得的“马达”可以是直线位移式的或是旋转式的其特点是低转速大力矩高效率快响应无磁干扰等是一类正在研究发展中的新型器件图尺嫂型压电步进线性马达结构示意上述类应用虽已发展成熟但要依靠单个器件获得位移量又大精度又高的效果是困难的需要与位移调节范围大的粗调装置结合使用班类压电微位移驱动器可利用压电陶瓷实现较大的电控位移由于机械加工摩擦配合等非压电陶瓷本身的原因其精度往往比前者要低压电陶瓷性质与压电微位移器各组成晶粒具有自发极化尸的压电陶瓷经强外电场极化处理后呈现了宏观平均剩余极化户于是同时产生了正负压电效应压电微位移器的原理基于负压电效应遵循于基本压电方程一叭式中为应变为电场强度禹为压电常数负压电效应和正压电效应。姚,为电荷面密度为应力一样它们的本质都是宏观平均剩余极化户随电场强度的线性变化所致即由于改变压电陶瓷自发极化电偶极子线性位移所致然值得指出的是对于压电陶瓷或压电微位移器来说应变与场强完全成线性关系满足上述压电方程是有条件的在压电陶瓷中指极化处理后实际上电场对位移存在着三种贡献或尸随在弹性限度内的变化引起的对线性变化的贡献随变化产生了畴转向对的贡献若压电陶瓷中只存在第种贡献则微位移随电场完全呈线性无滞后完全回零但实际上在压电陶瓷中两种贡献不可避免地或多或少地总与同时存在着
由于贡献是非线性不回零的基本原因因此压电陶瓷或压电微位移器的关系完全成线性完全回零是不可能
的对于一般压电陶瓷第种电致伸缩效应是相当小的要得到线性回零特性
好的器件应选择矫顽场强较高的压电陶瓷材料这样才可尽量减小畴转向对位移的不利影响在电场作用下畴转向不仅对器件非线性不回零产生不良影响甚至完全破坏器件的压电性能当正向施加时与原极化处理电场同相材料伸长时导致新的畴转向使线性变差尤应注意的是当反向施加时材料收缩当达到一时材料将突然产生畴反转此时材料将由收缩突然变为伸长完全破坏了原有的线性关系若进一步超过一材料将产生退极化而丧失压电性能众所周知对多晶体组成的陶瓷来说它们的组成结构应力等存在着不均匀性
各部分的值不可能完全均一所以实
际上
基本能满足压电方程即呈线性的电
场强度势必要远远地低于材料的平均值由以上分析得出对于需要线性
回
零特性好的随动驱动类应用应选择高的压电陶瓷材料材料一定即不变时工作电场越高非线性滞后也越大应
尽可能地降低工作场强如采用多层结构以下将介绍对压电微位移器虽然可
以通过施加反向电场利用收缩应变扩大可
利用的总位移量但须注意反向场强必须远低于一值若在总位移量足够的情况下则尽可能只采用正向伸长应变
对于类脉冲驱动应用由于只需通过正脉冲电场获得一定的伸长对关系线性无要求所以一般可采用较低大的软性压电陶瓷对皿类共振驱动应用为减