计算机图形学课后题答案-徐长青、许志闻
计算机图形学课后答案第6章

习题参考答案6.1交互式绘图系统基本的交互任务有哪些?答:1定位,2笔画,3定值,4选择,5拾取,6字符串,7三维交互。
6.2编写程序实现橡皮筋技术画直线和圆。
答:思想:首先将绘图模式设定为异或。
画直线时,点击鼠标左键,光标所在位置即为直线的起点,用鼠标牵引光标移动,当前光标所在位置即认为是直线的终点。
光标从原位置移动到新位置时,首先在起点与原位置之间画一条直线,因为是异或模式,原有直线变为不可见,然后再在起点与新位置之间画一条直线,作为当前直线。
画圆时,点击鼠标左键,光标所在位置即为圆的圆心,用鼠标牵引光标移动,当前光标所在位置与圆心的距离即被认为是圆的半径。
当鼠标牵引光标从原位置移动到新位置时,首先在以圆心与原位置的距离为半径画圆,因为是异或模式,原有的圆变为不可见,然后再以圆点与新位置的距离为半径画圆,作为当前圆。
6.3引力场是人机交互中的常见的辅助技术,它能给用户带来什么便利?设计人员在设计引力场的时候需要注意什么问题?答:用户用光标进行选图操作时,引力场的使用可使光标较容易地定位在选择区域小的图形上。
设计人员在设计引力场时,引力场的大小要适中,外形应与其所含图形的外形一致。
6.4图形模式和图像模式下,拖拽的处理方法有什么不同?答:图形模式下的拖拽是在异或的绘图模式下进行的。
首先在原位置再次绘制要拖拽图形,由于自身异或的结果为空,原位置处的图形变为不可见,然后在新位置处绘制图形,实现了图形的拖拽。
而图像模式下的拖拽,则是进行了图像的整体移动,即首先在要经过位置处按拖动图像大小保存原有屏幕图像,然后将拖动的图像整体移动到该位置,当图像离开该位置而移动到下一个新位置时,再恢复该位置保存的屏幕图像。
图形模式不需要保存屏幕图像,只需在原位置重绘图形。
图像模式需要保存图像经过处的屏幕图像,并在移开后重新显示保存的屏幕图像。
6.5请叙述三种输入控制模式的流程。
答:请求模式下,用户在接收到应用程序请求后才输入数据;应用程序等待用户输入数据,输入结束,才进行处理。
计算机图形学课后习题答案部分
一、问答题(25 分,每题5 分)1 、列举三种常见的颜色模型,简要说明其原理和特点。
答:所谓颜色模型就是指某个三维颜色空间中的一个可见光子集,它包含某颜色。
常用的颜色模型有 R G B 、 C M Y 、 H S V 等。
R G B 颜色模型通常用于彩色阴极射线管等彩色光栅图形显示设备中,它多、最熟悉的颜色模型。
它采用三维直角坐标系,红、绿、蓝为原色,各个可以产生复合色C MY 颜色模型以红、绿、蓝的补色青( C yan )、品红( Magenta )、黄( Yellow )为原色构成,常用于从白光中滤去某种颜色,又被称为减性原色系统。
印刷行业中 C MY 颜色模型。
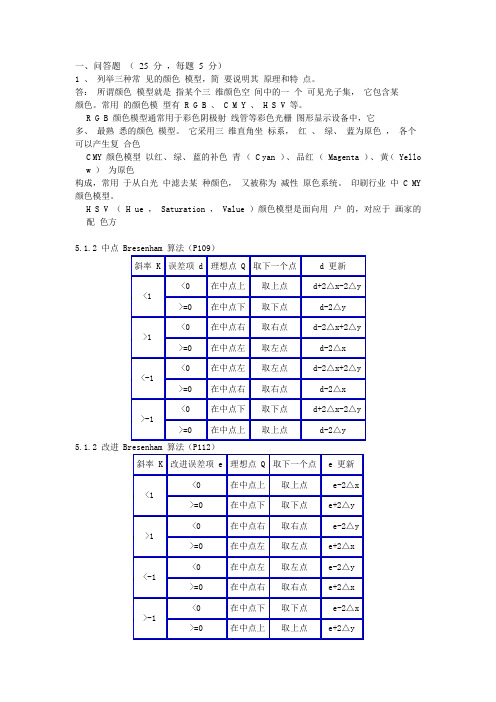
H S V ( H ue , Saturation , Value )颜色模型是面向用户的,对应于画家的配色方5.1.2 中点 Bresenham 算法(P109)5.1.2 改进 Bresenham 算法(P112)习题5(P144)5.3 试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。
(P111)解: k<=-1 |△y|/|△x|>=1 y为最大位移方向故有构造判别式:推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):所以有: yQ -kxQ-b=0 且yM=yQd=f(xM -kxM-b-(yQ-kxQ-b)=k(xQ-xM)所以,当k<0,d>0时,M点在Q点右侧(Q在M左),取左点 Pl (xi-1,yi+1)。
d<0时,M点在Q点左侧(Q在M右),取右点 Pr(xi ,yi+1)。
d=0时,M点与Q点重合(Q在M点),约定取右点 Pr(xi ,yi+1) 。
所以有递推公式的推导:d2=f(xi-1.5,yi+2)当d>0时,d2=yi+2-k(xi-1.5)-b 增量为1+k=d1+1+k 当d<0时,d2=yi+2-k(xi-0.5)-b 增量为1=d1+1当d=0时,5.11 如图5-59所示多边形,若采用扫描转换算法(ET边表算法)进行填充,试写出该多边形的边表ET和当扫描线Y=4时的有效边表AET(活性边表)。
《计算机图形学》习题与解答
《计算机图形学》习题与解答第一章概述1. 试描述你所熟悉的计算机图形系统的硬软件环境。
计算机图形系统是计算机硬件、图形输入输出设备、计算机系统软件和图形软件的集合。
例如:计算机硬件采用PC、操作系统采用windows2000,图形输入设备有键盘、鼠标、光笔、触摸屏等,图形输出设备有CRT、LCD等,安装3D MAX图形软件。
2. 计算机图形系统与一般的计算机系统最主要的差别是什么?3. 图形硬件设备主要包括哪些?请按类别举出典型的物理设备?图形输入设备:鼠标、光笔、触摸屏和坐标数字化仪,以及图形扫描仪等。
图形显示设备:CRT、液晶显示器(LCD)等。
图形绘制设备:打印机、绘图仪等。
图形处理器:GPU(图形处理单元)、图形加速卡等等。
4. 为什么要制定图形软件标准?可分为哪两类?为了提高计算机图形软件、计算机图形的应用软件以及相关软件的编程人员在不同计算机和图形设备之间的可移植性。
图形软件标准通常是指图形系统及其相关应用系统中各界面之间进行数据传送和通信的接口标准,另外还有供图形应用程序调用的子程序功能及其格式标准。
5. 请列举出当前已成为国际标准的几种图形软件标准,并简述其主要功能。
(1)CGI(Computer Graphics Interface),它所提供的主要功能集包括控制功能集、独立于设备的图形对象输出功能集、图段功能集、输入和应答功能集以及产生、修改、检索和显示以像素数据形式存储的光栅功能集。
(2)GKS(Graphcis Kernel System),提供了应用程序和图形输入输出设备之间的接口,包括一系列交互和非交互式图形设备的全部图形处理功能。
主要功能如下:控制功能、输入输出功能、变换功能、图段功能、询问功能等。
6. 试列举计算机图形学的三个应用实例。
(1)CAD/CAM(2)VISC(3)VR.第二章光栅图形学1. 在图形设备上如何输出一个点?为输出一条任意斜率的直线,一般受到哪些因素影响?若图形设备是光栅图形显示器,光栅图形显示器可以看作是一个像素的矩阵,光栅图形显示器上的点是像素点的集合。
计算机图形学(山东联盟)知到章节答案智慧树2023年山东财经大学

计算机图形学(山东联盟)知到章节测试答案智慧树2023年最新山东财经大学第一章测试1.在几何造型系统中,描述物体的三维模型有三种,即线框模型、实体模型和________()。
参考答案:表面模型2.计算机图形是指由________和_________等非几何要素构成的,从现实世界中抽象出来的图或形()。
参考答案:明暗、灰度(亮度)、色彩;点、线、面、体等几何要素3.计算机图形学主要研究内容有()。
参考答案:图形的描述;绘制;交互处理4.计算机图形学的主要研究对象有()。
参考答案:图形输入和控制的人机交互界面;计算机环境下景物的几何建模方法;模型的处理方法5.凡是能够在人的视觉系统中形成视觉印象的客观对象都称为图形。
()参考答案:对第二章测试1.根据视图所在的平面建立的坐标系为________()。
参考答案:观察坐标系2.灰度等级为256级,分辨率为1024*1024的显示器,至少需要的帧缓存容量为 ( )参考答案:1MB3.计算机图形系统的主要功能有计算、_________等基本功能,它们相互协作,完成图形数据的处理过程()。
参考答案:输出;交互;输入;存储4.一个计算机图形系统中计算功能有()。
参考答案:图形的平移、旋转、投影、透视等几何变换;图形之间相互关系的检测;图形的描述、分析和设计;曲线、曲面的生成5.光栅化后的像素存放在缓存里的图形可自动输出到显示屏幕,完成场景的显示,人们就可以通过显示器观看图形。
()参考答案:错第三章测试1.a计算两物体各表面之间的交线 b建立新物体的边界表示 c对物体表面进行判定分类 d检查两物体是否相交。
如上,当物体采用边界表示时,它们之间的集合运算的具体实现步骤为()。
参考答案:dacb2.设正则集合C表示A和B两物体的交,C=A∩*B,b(A∩*B)=b(A∩iB)∪(bB∩iA) ∪(bA∩bB),则b(A∩bB)a-s表示bA∩bB中的______部分()。
计算机图形学基础课后部分习题答案
计算机图形学基础第一章1.名词解释:图形:从客观世界物体中抽象出来的带有颜色信息及形状信息的图和形。
图像:点阵法:是用具有灰度或颜色信息的点阵来表示的一种方法。
参数法:是以计算机中所记录图形的形状参数与属性参数来表示图像的一种方法。
2.图形包括那两方面的要素,在计算机中如何表示他们?构成图形的要素可以分为两类:一类是刻画形状的点、线、面、体等几何要素;另一类是反映物体本身固有属性,如表面属性或材质的明暗、灰度、色彩等非几何要素。
3.什么叫计算机图形学?分析计算机图形学,数字图像处理和计算机视觉学科间的关系。
计算机图形学是研究怎样利用计算机来显示、生成和处理图形的原理、方法和技术的一门学科。
【关系图在课本第一页】4,有关计算机图形学的软件标准有哪些?计算机图形核心系统(GKS)及其语言联编、计算机图形元文件(CGM),计算机图形接口(CGI),基本图形转换规范(IGES)、产品数据转换(STEP)6.试发挥你的想象力,举例说明计算机图形学有哪些应用范围,解决的问题是什么?【具体参照课本第5页】第二章1.名词解释LCD: 就是Liquid Crystal Display,它是利用液晶的光电效应,通过施加电压改变液晶的光学特性,从而造成对入射光的调剂,使通过液晶的透射光或反射光受所加电压的控制,达到显示的目的。
LED: 即Liquid-Emitting Diode, 采用二极管激发的光来显示图像。
随机扫描:采用随机定位的方式控制电子束运动光栅扫描:示器显示图形时,电子束依照固定的扫描线和规定的扫描顺序进行扫描。
电子束先从荧光屏左上角开始,向右扫一条水平线,然后迅速地回扫到左边偏下一点的位置,再扫第二条水平线,照此固定的路径及顺序扫下去,直到最后一条水平线,即完成了整个屏幕的扫描。
刷新:刷新是经过一段时间后,信息可能丢失,需要重写,为了使信息储存更长的时间,必须不断的刷新每个储存单元中储存的信息,也就是将各储存单元中的数据读出之后,再写回到元单元中,对各储存单元中的电容器进行充电.刷新频率:刷新率是指电子束对屏幕上的图像重复扫描的次数。
计算机图形学配卷及答案 (徐长青著)

哈尔滨理工大学2008-2009学年第 一 学期考试试题 A 卷答案考试科目:计算机图形学 考试时间:120分钟 试卷总分100分一、选择题(共5小题,每小题2分,总计10分,请直接在原题上作答) 1、以计算机中所记录的形状参数与属性参数来表示图形的一种方法叫做( ),一般把它描述的图形叫做( );而用具有灰度或颜色信息的点阵来表示图形的一种方法是( ),它强调图形由哪些点组成,并具有什么灰度或色彩,一般把它描述的图形叫做( )。
AA 参数法、图形、点阵法、图像B 点阵法、图像、参数法、图形C 参数法、图像、点阵法、图形D 点阵法、图形、参数法、图像 2、下列设备中属于图形输出设备的是( B )○1鼠标○2LCD ○3键盘○4 LED ○5打印机○6扫描仪○7绘图仪○8触摸屏 A ○1○3○6○8 B ○2○4○5○7 C ○2○5○6○7 D ○4○6○7○8 3、按照所构造的图形对象来分,点、曲线、平面、曲面或实体属于( ),而山、水、云、烟等自然界丰富多彩的对象属于( )。
A A 、规则对象、不规则对象 B 、规则对象、属性对象 C 、不规则对象、几何对象 D 、不规则对象、属性对象4、对于区域内外测试中,常常使用奇-偶规则测试的方法,按照该规则测试图形,如图1所示,试选出以下属于外部点的是( D )。
A 、M 点B 、P 点C 、O 点D 、N 点5、B 样条曲线中,按照节点矢量T 的不同可以将B放均匀B 样条和非均匀B 样条,以下选项中属于开放均匀B 样条节点矢量的是(C )。
A 、T =(0,1,2,3,4,5,6)B 、T =(0,0,1,1,2,2,3,3)C 、T =(0,0,0,1,2,3,4,5,5,5)D 、T =(0,0.1,0.2,0.2,0.5,1)二、填空题(共8小题,每空1分,总计25分,请直接在原题上作答)1、一个交互式计算机图形系统应具有(计算)、(存储)、(对话)、(输入)、(输出)等五个方面的功能。
计算机图形学第8章课后习题参考答案

第八章1.传统动画和计算机动画有什么不同?传统动画采用手工方法制作,精度差且效率低;而计算机动画立体感强,可以改变视角、视距、视野及景深,具有明暗光线变化和阴影,使物体产生不同灰度和颜色渐变以及逼真的光照,可以产生纹理质感,且这些特点与效果是手工动画难以实现或不可能实现的。
2.计算机动画研究的内容是什么?从目前国外对计算机动画的研究来看,计算机动画研究的具体内容可分为以下方面:(1)关键帧动画;(2)基于机械学的动画和工业过程动画仿真;(3)运动和路径的控制;(4)动画语言与语义;(5)基于智能的动画,机械人与动画;(6)动画系统用户界面;(7)科学可视化计算机动画表现;(8)特技效果,合成演员;(9)语言、音响合成,录制技术。
3.计算机动画应用前景如何?(1)电影电视动画片制作(2)辅助教学演示(3)仿真模拟(4)指挥调度演习(5)医疗诊断(6)游戏开发4.从物体的物理属性角度出发,可以将动画划分为哪些类型?按照动画物体自身物理属性的不同,三维动画也可以分为:刚体动画、软体动画、关节动画以及粒子动画等。
5.什么叫关键帧动画和算法动画?关键帧动画是通过一组关键帧或关键参数值而得到中间动画帧序列(1)形状插值:从关键帧本身而得到中间动画帧(2)关键参数插值:通过插值物体模型关键参数数值来获得中间动画。
算法动画由算法实现,一般适用于三维情形。
(1)运动学算法:由运动学方程确定物体的运动轨迹和速率。
(2)动力学算法:由力学方程确定物体运动形式。
(3)反向运动学算法:已知链接物末端位置和状态,反求运动方程以确定运动形式。
(4)反向动力学算法:已知链接物末端位置和状态,反求动力学方程以确定运动形式。
(5)随机运动算法:在某些场合下加进运动控制随机因素。
6.动画旋转都有哪些数学表示方式,为何要引入四元数的表示方式?三维空间中的旋转可用(1)旋转矩阵(2)欧拉角(3)四元数(Quaternions)等数学形式来表示。
《计算机图形学》1-8章习题解答

3.请给出Hermite形式曲线的曲线段i与曲线段i-1及曲线段i+1实现C1连续的条件。
答:参见教材第133页。
(4)进行步骤(2)和(1)的逆变换,变换矩阵为 和 。
设向量 ,则有 ,所以变化矩阵为:
8.如何确定一个点P在观察点的内部还是外部?
答:一个平面将空间分成两部分。平面的一般方程是:
对于任意点 ,若定义一个标量函数 ,有:
如果 ,则说明P点和Q点在同一边(相对平面而言)。令 分别表示顶平面、底平面、右平面、左平面、前平面、后平面。
(a)相对于水平线y=2;
(b)相对于垂直线x=2;
(c)相对于直线y=x+2。
答:
(a)
(b)
(c)
4.请写出一个图例变换,将正方形A(0,0),B(1,0),C(1,1),D(0,1)一半大小的复本放到主图形的坐标系中,且正方形的中心在(-1,-1)点。
答:原正方形的中心在P(1/2,1/2),首先进行关于P点的缩放变换,变换矩阵为M;
对 到 直线上的任意点 ,要证明 在 和 连接的直线上,其中 是 的变换,且 ,(3)
即要证明: ,(4)
将公式(1)、(2)、(3)代入公式(4),经整理得:
因为 满足: ,
由此得到, 在 和 连接的直线上。
6.二次旋转变换定义为先绕x轴旋转再绕y轴旋转的变换:
(a)写出这个变换的矩阵;
(b)旋转的先后顺序对结果有影响吗?
A(0001)B(1000)、C(0000)D(1010)、E(0000)F(0000)、G(0100)H(0010)、I(1001)J(1000)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机图形学课后题答案10.设五边形的五个顶点是(10.5,10.5),(15,5),(12,5),(8,2.5),(4,5.5),要利用使用活跃边表的扫描转换算法进行填充,写出应填写的ET表,写出活跃边表的变化情况。
e3 e2e4e1e563 68-4/3e 1 582∧e 5 ∧2∧ 4 ∧ 5 6 11 141/3 -2/3∧e 37 ∧ 8 11 52/57/5e 2 ∧ ∧ 9 ∧ 10 ∧ 11 ∧ 12 ∧ 13 …∧ y max x min 1/mET :Y 吊桶表第3章2.写出完成如下平面图形变换的变换矩阵;(1) 保持点(5,10)固定,x 方向放大3倍,y 方向放大2倍。
(2) 绕坐标原点顺时针旋转︒90。
(3) 对直线x y =成轴对称。
(4) 对直线x y -=成轴对称。
(5) 沿与水平方向成θ角的方向扩大1S 倍,沿与水平方向成θ+︒90角的方向扩大2S 倍。
(6) 对于平面上任意一点),(00y x 成为中心对称。
(7) 对平面上任意一条方程为0=++C By Ax 的直线成轴对称。
(1)300(5,10)(3,2)(5,10)02010101T S T ⎡⎤⎢⎥--⋅⋅--=⎢⎥⎢⎥--⎣⎦(2)AET 指针 ∧初始化 扫描线10 11 93/57/5 扫描线3 6 8-4/3 e 15 82 ∧ e 5e2扫描线4 6 62/3 -4/3e 15 10 2∧ e 5扫描线5 6 51/3 -4/3e 1 5122∧e 5扫描线6 64-4/3 e 1 11 141/3 -2/3 ∧e 3扫描线7 11 52/57/5e 211 132/3 -2/3 ∧e 3 扫描线8 11 64/57/5 e211 13-2/3 ∧e 3 扫描线9 11 81/57/5e 211 121/3 -2/3 ∧e 311 112/3 -2/3 ∧e 3 扫描线11 11 117/5e 211 11-2/3 ∧e 3 ∧扫描线12cos(90)sin(90)0010(90)sin(90)cos(90)010*******R -︒-︒-⎡⎤⎡⎤⎢⎥⎢⎥-︒=--︒-︒=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(3)22220022221000102222(45)(1,1)(45)001001002222001001001001R S R ⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥︒⋅-⋅-︒=-⋅⋅=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(4)22220022221000102222(45)(1,1)(45)001001002222001001001001R S R ⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥︒⋅-⋅-︒=-⋅-⋅=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(5)1122221212221212cos()sin()000cos()sin()0()(,)()sin()cos()000sin()cos()0001001001cos sin ()cos sin 0()cos sin sin cos 0001S R S S S R S S S S S S S S S θθθθθθθθθθθθθθθθθθ--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⋅⋅=---⋅⋅-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎡⋅+⋅-⎢=-⋅+⋅⎣⎤⎥⎢⎥⎢⎥⎦当S 1=S 2时,111100()(,)()0001S R S S S R S θθ⎡⎤⎢⎥-⋅⋅=⎢⎥⎢⎥⎣⎦11221212cos()sin()000()(,)sin()cos()000001001cos sin 0sin cos 0001S R S S S S S S S S θθθθθθθθθ⎡⎤⎡⎤⎢⎥⎢⎥⋅⋅=-⋅⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⋅⋅⎡⎤⎢⎥=-⋅⋅⎢⎥⎢⎥⎣⎦11221212cos()sin()000()(,)sin()cos()000001001cos sin 0sin cos 0001S R S S S S S S S S θθθθθθθθθ⎡⎤⎡⎤⎢⎥⎢⎥⋅⋅=-⋅⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⋅⋅⎡⎤⎢⎥=-⋅⋅⎢⎥⎢⎥⎣⎦(6)00000100100100100(,)(1,1)(,)01001001001010011221T x y S T x y x y x y x y --⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥--⋅--⋅=-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦(7)当0A ≠时,2222222222222222(,0)(())(1,1)(())(,0)00100100100010001000100010100101C B B CT R arctg S R arctg T A A A AA B A B A B A B A BA B B A B A A B A B A B A B C A ⋅-⋅-⋅--⋅-⎡⎤⎡⎤-⎡⎤⎢⎥⎢⎥++++⎢⎥⎢⎥⎢⎥-⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥++++⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦2222222222222222012020221CA B A AB A B A B AB A B A B A B AC BC A B A B ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎡⎤--⎢⎥++⎢⎥-⎢⎥=-⎢⎥++⎢⎥⎢⎥--⎢⎥++⎣⎦Ax+By+C=-C/B-C/Axy当0,0A B =≠时,方程退化为0By C +=,即C y B=-(0,)(1,1)(0,)1001001000100100100010101100010201C C T S T B B C C B B CB ⋅-⋅-⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦-⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥-⎢⎥⎣⎦当0B ≠时,By+C=0- C/Bxy2222222222222222(0,)(())(1,1)(())(0,)00100100100010001000100010100101C A A C T R arctg S R arctg T B B B BB A B A A B A B A BA B A B A B A B A B A B A B C B ⋅--⋅-⋅-⋅-⎡⎤⎡⎤-⎡⎤⎢⎥⎢⎥++++⎢⎥⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥++++⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦2222222222222222012020221C B B A AB A B A B AB A B A B A B AC BC A B A B ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎡⎤--⎢⎥++⎢⎥-⎢⎥=-⎢⎥++⎢⎥⎢⎥--⎢⎥++⎣⎦当0,0B A =≠时,方程退化为0Ax C +=,即C x A=-(,0)(1,1)(,0)1001001000100100100010101100010201C C T S T A A C C A A C A ⋅-⋅-⎡⎤⎡⎤⎢⎥⎢⎥-⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦-⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦10. 设图形软件中有设置坐标变换矩阵的命令Set-Matrix(x S ,y S ,a ,x l ,y l ,Matris),它是按比例、旋转和平移的次序与系统中已有的变换矩阵右乘产生新的变换矩阵。
写出产生下列图形变换的Set-Matirx 命令或命令序列。
(假设系统中现有变换矩阵是单位矩阵)。
(1) 使图形以点(5,5)为中心放大2倍。
(2) 使图形中点(10,-10)移至坐标原点然后绕它顺时针旋转︒45。
(3) 使图形以10=y 的直线成轴对称。
(4) 使图形以点(10,10)反射。
设I 为单位矩阵。
(1)Set-Matrix(1,1,0,-5,-5,I) Set-Matrix(2,2,0,5,5,I) (2)Set-Matrix(1,1,0,-10,10,I) Set-Matrix(1,1,-45,0,0,I) (3)Set-Matrix(1,1,0,0,-10,I) Set-Matrix(1,-1,0,0,10,I) (4)Set-Matrix(1,1,0,-10,-10,I) Set-Matrix(-1,-1,0,10,10,I)13.若窗口在定义为平行于用户坐标轴的直立矩形后,还允许此窗口再绕左下角点旋转θ角,写出由旋转后窗口到直立矩形视见区的变换矩阵。
Ax+C=0-C/Axy1200100cos()sin()0100010sin()cos()00001010011001cos sin 0si H T R S T vxh vxlwxh wxlvyh vylwyh wylwxlwyl vxl vyl vxh vxl vxh vxl wxh wxlwxh wxlθθθθθθ=⋅⋅⋅-⎡⎤⎢⎥---⎡⎤⎡⎤⎡⎤⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥=---⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦--⋅-⋅--=()()n cos 0cos sin sin cos 1vxh vxlvxh vxl wxh wxl wxh wxlvxh vxl vxh vxlwxl wyl vxl wxl wyl vyl wxh wxl wxh wxl θθθθθθ⎡⎤⎢⎥⎢⎥--⎢⎥⋅⋅⎢⎥--⎢⎥--⎢⎥-⋅-⋅⋅+⋅-⋅⋅+⎢⎥--⎣⎦15.给出三维空间中通过原点和点),,(111z y x 的一条直线,试用下面提示的三种不同方法把这条直线旋转到正的z 轴上,说明求出的三个变换矩阵可能不同,但就完成要求变换的效果看是相同的。
(1) 绕x 轴旋转到xz 平面,然后绕y 轴旋转到z 轴。
(2) 绕y 轴旋转到yz 平面,然后绕x 轴旋转到z 轴。
(3) 绕z 轴旋转到xz 平面,然后绕y 轴旋转到z 轴。
(1)绕x 轴旋转到xz 平面,然后绕y 轴旋转到z 轴1100000100110011110100011100001111000010101x v xv u u z yu u x y z y v v uv v u y z x v x z y z v v u u uv v u ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦22222,11111cos /,sin /,cos /,sin /111(,,,1)(,0,,1)(0,0,,1)1111v y z u x y z z v y v v u x u x y z x v u ααββ=+=++====-→→(2)绕y 轴旋转到yz 平面,然后绕x 轴旋转到z 轴1111100001100100101000011100001111000100010001z x y x z x v uv u yv v v y v u u u u x z y v x y z z v v uu v uv u ⎡⎤⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦22222,11111cos /,sin /,cos /,sin /111(,,,1)(0,,,1)(0,0,,1)1111v x z u x y z z v x v v u y u x y z y v u ααββ=+=++=-=-==→→xzαβ(x 1,y 1,z 1)(x 1, 0, v )O(3)绕z 轴旋转到xz 平面,然后绕y 轴旋转到z 轴11110111000011110100011001001001000001010001x z y x x yzv uv v u v v u u y z x y y x uv v u z v v v z vu u u u ⎡⎤-⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦22222,11111cos /,sin /,cos /,sin /111(,,,1)(,0,,1)(0,0,,1)1111v x y u x y z x v y v z u v u x y z v z u ααββ=+=++==-==-→→xzαβ(x 1,y 1,z 1)(0, y 1,v )O(4)绕z 轴旋转到yz 平面,然后绕x 轴旋转到z 轴111110000110010011110110010010010000010010001y x z x y xv uv u z v v vx y z y x y u u v uv u z v v v z v u u u u ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-=⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦22222,11111cos /,sin /,cos /,sin /111(,,,1)(0,,,1)(0,0,,1)1111v x y u x y z y v x v z u v u x y z v z u ααββ=+=++====→→xzαβ(x 1,y 1,z 1)(v ,0,z 1)O16.空间中三个点1P ,2P ,3P 普通坐标分别为(1,1,1),(2,2,12+),(3,3,3),要做一个变换,使点1P 移为原点,直线21P P 落在z 轴的负方向上,直线31P P 落在0=x 平面中y 的正半平面上。