基于神经网络实现模糊控制的方法
神经网络与模糊控制的结合应用

神经网络与模糊控制的结合应用I. 引言神经网络和模糊控制都是近年来广泛应用于自动控制领域的两种重要技术。
神经网络以其较好的学习能力和预测能力,受到了广泛的关注。
而模糊控制以其强大的非线性建模和很好的抗干扰能力而备受推崇。
为了克服单一控制技术的局限性,研究者开始尝试将神经网络和模糊控制进行结合应用。
II. 神经网络和模糊控制的概述1. 神经网络神经网络是一种学习型系统,其结构可以类比为人类大脑的神经元网络。
神经网络通过学习数据集中的模式,能够从中学习出输入输出之间的映射关系。
神经网络的优点在于其能够进行非线性建模、通用近似和容错性能强等特点。
2. 模糊控制模糊控制是一种基于模糊逻辑的控制方法。
其将模糊逻辑应用于实际系统的控制过程中,达到了比传统控制方法更好的抗干扰能力和系统的非线性动态性能。
III. 神经网络模糊控制器设计及应用1. 神经网络模糊控制结合的优点神经网络模糊控制相较于传统的控制方法,具有较强的非线性建模和很好的抗干扰能力,能够捕捉到很好的系统动态,从而实现控制的效果。
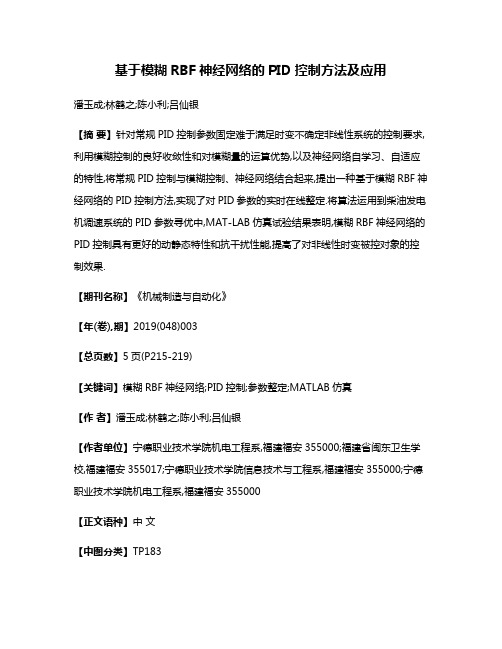
2. 神经网络模糊控制器的建立神经网络模糊控制系统可以分为两个部分,分别是模糊控制器和神经网络控制器。
其中模糊控制器负责实现对系统模糊建模,而神经网络控制器则用于学习模糊控制器的输入输出映射关系。
图1:神经网络模糊控制器的框图3. 神经网络模糊控制器在机器人路径规划中的应用机器人路径规划是一个非常复杂的问题,需要考虑到环境的不确定性以及机器人动力学特性。
神经网络模糊控制器通过学习路径规划时的输入输出映射关系,能够提高路径规划的准确性和鲁棒性。
4. 神经网络模糊控制器在工业过程控制中的应用在工业过程控制中,神经网络模糊控制器可以通过学习过程时的输入输出映射关系,实现对工业过程的自适应控制。
其优点在于能够实现强大的建模能力和很好的自适应性,从而提升了工业过程的控制性能。
IV. 总结神经网络和模糊控制都是近年来比较热门的技术,两者在控制领域的应用也在不断发展。
基于模糊RBF神经网络的PID控制方法及应用
基于模糊RBF神经网络的PID控制方法及应用潘玉成;林鹤之;陈小利;吕仙银【摘要】针对常规PID控制参数固定难于满足时变不确定非线性系统的控制要求,利用模糊控制的良好收敛性和对模糊量的运算优势,以及神经网络自学习、自适应的特性,将常规PID控制与模糊控制、神经网络结合起来,提出一种基于模糊RBF神经网络的PID控制方法,实现了对PID参数的实时在线整定.将算法运用到柴油发电机调速系统的PID参数寻优中,MAT-LAB仿真试验结果表明,模糊RBF神经网络的PID控制具有更好的动静态特性和抗干扰性能,提高了对非线性时变被控对象的控制效果.【期刊名称】《机械制造与自动化》【年(卷),期】2019(048)003【总页数】5页(P215-219)【关键词】模糊RBF神经网络;PID控制;参数整定;MATLAB仿真【作者】潘玉成;林鹤之;陈小利;吕仙银【作者单位】宁德职业技术学院机电工程系,福建福安355000;福建省闽东卫生学校,福建福安355017;宁德职业技术学院信息技术与工程系,福建福安355000;宁德职业技术学院机电工程系,福建福安355000【正文语种】中文【中图分类】TP1830 引言PID控制(比例、积分和微分控制)是工业过程控制中应用较为广泛的控制策略之一,具有算法简单、容易实现及可靠性高等特点,适用于可建立精确数学模型的确定性系统,而实际工业生产中的控制系统大都存在严重的时变性、滞后性、非线性和现场干扰等,难于建立精确的数学模型,采用常规PID控制已无法满足系统的控制要求。
针对常规PID控制由于参数不能在线自整定,对非线性时变对象无法取得好的控制效果,目前已有学者将智能控制技术应用于常规PID控制[1-6]。
模糊控制无需建立被控对象精确的数学模型,以模糊集合理论为基础,凭借专家知识、人工经验制定规则,利用模糊逻辑推理方法,实现对被控对象的智能控制,具有良好的鲁棒性和适应性,但确定其模糊规则和隶属度函数依赖于经验,缺乏自学习能力。
机器人控制系统设计中的模糊控制器调参方法

机器人控制系统设计中的模糊控制器调参方法机器人控制系统中,模糊控制器是一种重要的控制方法,它能够处理模糊和不确定性的问题。
然而,模糊控制器的性能很大程度上取决于其参数的调节。
在本文中,我们将探讨机器人控制系统设计中模糊控制器的调参方法。
在机器人控制系统中,模糊控制器的调参方法旨在使其在不同工况下实现良好的控制性能,包括快速响应、精确跟踪、抗干扰能力等。
首先,最常用的模糊控制器调参方法是试错法。
试错法基于经验和实践,通过不断地调节模糊控制器的参数,观察系统的响应,从而逐步达到最优的控制效果。
试错法的关键是对模糊控制器的参数进行合理的调整,可以使用一些性能指标来衡量控制效果,并根据系统的要求进行适当调整。
其次,基于神经网络的模糊控制器调参方法也被广泛应用于机器人控制系统中。
通过训练神经网络来学习模糊控制器的参数,可以提高模糊控制器的自适应能力。
具体而言,首先需要确定神经网络的结构和参数,然后使用已知的控制策略和训练数据对神经网络进行训练。
训练完成后,可以将训练得到的参数应用于模糊控制器,并通过迭代优化来进一步提高控制性能。
此外,进化算法也是一种有效的模糊控制器调参方法。
进化算法基于生物进化的原理,通过自然选择和优胜劣汰的机制,从一个初始的种群中逐步演化得到最优解。
在机器人控制系统中,可以将模糊控制器的参数看作染色体,并使用进化算法对参数进行优化。
具体实施时,首先需要确定适应度函数,然后根据适应度函数对种群进行选择、交叉和变异,最终得到最优的模糊控制器参数。
最后,专家经验法也是一种常用的模糊控制器调参方法。
该方法基于专家的经验和知识,通过提取和总结专家的经验,将其转化为调参规则和策略,进而指导模糊控制器的调参过程。
根据不同的控制系统和任务需求,可以制定相应的专家经验法进行参数调节。
总结起来,机器人控制系统设计中,模糊控制器调参方法多种多样。
根据不同的应用场景和任务需求,我们可以选择试错法、基于神经网络的调参方法、进化算法或专家经验法等方法进行调参。
模糊控制与神经网络控制

模糊控制与神经网络控制模糊控制和神经网络控制是现代控制领域中的两个重要研究方向,它们通过不同的方法和理论来解决复杂系统的控制问题。
本文将就这两种控制方法进行介绍和对比,并探讨它们在实际应用中的优劣势。
一、模糊控制模糊控制是一种基于模糊逻辑理论的控制方法,它通过将输入和输出之间的关系进行模糊化来实现系统的控制。
模糊控制器的设计通常包括模糊化、规则库的建立、推理机制以及解模糊化等步骤。
在模糊控制中,输入和输出以模糊集形式表示,通过一系列的模糊规则进行推理得到控制信号。
模糊规则库中存储了专家知识,根据实际问题的需求可以设计不同的规则。
推理机制使用模糊规则进行推理,最后通过解模糊化将模糊输出转化为具体的控制量。
模糊控制的优点之一是适用于非线性和不确定性系统,它能够通过模糊化处理来处理实际系统中的不确定性和模糊性。
此外,模糊控制能够利用专家经验进行控制器的设计,无需准确的系统数学模型。
然而,模糊控制也存在一些局限性。
首先,模糊控制的规则库和参数通常需要由专家进行手动设计,这对专家的经验和知识有一定的要求。
其次,模糊控制的性能也会受到模糊规则的数量和质量的影响,如果规则库设计不当,控制性能可能无法满足要求。
二、神经网络控制神经网络控制是一种基于人工神经网络的控制方法,它通过将系统模型表示为神经网络结构来实现控制。
神经网络是一种模仿生物神经系统结构和功能的计算模型,具有自适应学习和适应性处理的能力。
在神经网络控制中,神经网络被用作控制器来学习系统的映射关系。
通过输入和输出的样本数据,神经网络根据误差信号不断调整权重和阈值,使得输出逼近于期望输出。
神经网络控制通常包括网络的结构设计、学习算法的选择和参数调整等步骤。
与模糊控制相比,神经网络控制具有更好的自适应性和学习能力。
它能够通过学习过程来建立系统的非线性映射关系,并且对于未知系统具有较好的鲁棒性。
此外,神经网络控制不需要准确的系统模型,对系统的数学模型要求相对较低。
基于神经网络的模糊控制系统设计与实现

基于神经网络的模糊控制系统设计与实现随着科技的不断发展,应用人工智能技术来解决问题已经成为趋势。
其中,神经网络和模糊控制系统是两个比较常用的技术,二者结合起来也是很有前途的。
一、神经网络神经网络是模拟人类神经系统的一种计算模型。
它由许多简单的神经元组成,这些神经元之间通过连接进行信息传递,从而实现了模式识别、分类、回归等功能。
通俗地说,就是让计算机模拟人脑的思维方式。
神经网络有很多种结构和算法,其中比较常用的是多层感知机(Multi-layer Perceptron,MLP)。
MLP是一种前向反馈神经网络,由输入层、隐藏层和输出层组成,如图1所示。
图1 MLP网络结构示意图其中,输入层和输出层很好理解,而隐藏层则是用来处理输入与输出之间的关系,其中每个神经元计算的结果会被传递给下一层。
MLP是一种有监督学习算法,即需要给定训练集和对应的目标输出,通过反向传播算法来训练神经网络,不断调整权重和偏置,从而减小预测输出与真实输出之间的误差。
在训练完成以后,神经网络可以用来进行预测,从而实现分类、预测等任务。
二、模糊控制系统模糊控制系统是一种基于模糊数学理论的控制系统。
不同于传统控制系统中的明确的控制规则和精确的数学模型,模糊控制系统通过模糊集合、模糊逻辑来处理模糊信息,从而实现控制目标。
通俗地说,就是将现实世界中的模糊概念映射到数学空间中,通过对模糊概念的描述和处理来实现控制。
例如,温度控制系统可以被描述为“当室内温度较低时,加热器应该加热;当室内温度较高时,加热器应该停止加热”这样一个模糊规则库,从而实现对室内温度的控制。
模糊控制系统有很多算法和方法,其中最常用的是基于 Mamdani 模型的模糊控制系统。
Mamdani 模型将输入变量和输出变量用模糊集合来描述,通过一系列的 IF-THEN 规则来实现模糊控制,具体结构如图2所示。
图2 Mamdani 模糊控制系统结构示意图其中,输入变量被映射到它们各自的模糊集合上,每个输入变量都有自己的隶属函数来描述模糊集合的特征。
一种双模糊控制器的设计实现
一种双模糊控制器的设计实现一种双模糊控制器的设计实现双模糊控制器是智能控制领域的一种有效方法,它将模糊逻辑理论与神经网络结合起来,为控制系统提供了一种新的控制方式。
其特点在于可以通过模糊逻辑系统提供快速、灵活的控制,并通过神经网络系统实现对系统状态信息的补充处理,从而使控制系统更加精准、可靠。
双模糊控制器的设计实现包括三个部分:模糊逻辑系统的设计实现、神经网络系统的设计实现以及双模糊控制器的设计实现。
首先,模糊逻辑系统的设计实现是双模糊控制器的基础,要求模糊逻辑系统能有效地捕获系统的运行特性,并能够快速、灵活地对系统进行控制。
因此,在模糊逻辑系统的设计实现中,应当根据系统的不同特性选择合适的模糊规则,然后采用模糊化方法对模糊规则进行描述,并使用模糊推理方法计算出模糊规则的输出结果。
其次,神经网络系统的设计实现是双模糊控制器的核心,要求神经网络系统能够通过学习实现对系统状态信息的补充处理,从而起到加强控制精度的作用。
因此,在神经网络系统的设计实现中,应当根据系统的具体特点选择合适的神经网络结构,然后采用相关的神经网络训练方法对神经网络进行训练,以实现对系统状态信息的补充处理。
最后,双模糊控制器的设计实现是双模糊控制器的最终目的,要求双模糊控制器能够有效地结合模糊逻辑系统和神经网络系统,使得控制系统更加精准、可靠。
因此,在双模糊控制器的设计实现中,应当首先对模糊逻辑系统和神经网络系统进行联合控制,然后采用模糊规则和神经网络输出结果之间的权重系数进行调整,以实现对控制系统的最优精确控制。
总而言之,双模糊控制器的设计实现是一项十分复杂的工作,它需要经过模糊逻辑系统的设计实现、神经网络系统的设计实现以及双模糊控制器的设计实现三个部分的深入研究和应用,才能真正实现双模糊控制器的最优精确控制。
基于人工神经网络下的模糊控制理论
工业技术科技创新导报 Science and Technology Innovation Herald76DOI:10.16660/ki.1674-098X.2017.30.076基于人工神经网络下的模糊控制理论①张弛(河钢乐亭钢铁有限公司 河北唐山 063600)摘 要:人工神经网络是人工智能的核心思想,模糊控制是实现人工智能的重要手段,二者在现代自动化技术的发展上扮演着不可或缺的角色。
工业自动化控制中的不确定性、非线性,复杂程度高是任何控制方式都要面对的问题。
基于人工神经网络的模糊控制能很好的解决这一难点,具有广阔的应用前景。
随着现代冶金工艺技术的迅速发展,对工艺过程参数的控制精度要求越来越高,生产设备及系统日趋大型化、复杂化。
如何实现智能制造已成为目前工业发展的重要课题。
本文在简单介绍了人工神经网络与模糊控制的历史、发展及基本原理下,重点讲述了结合BP神经网络与PID模糊控制器的自动化控制方案。
关键词:BP神经网络 PID模糊控制 自学习中图分类号:TP273 文献标识码:A 文章编号:1674-098X(2017)10(c)-0076-03①作者简介:张弛(1973—),男,河北唐山人,硕士,高级工程师,从事控制理论与应用的研究。
人工神经网络的英文全称是A r t i f i c i a l N e u r a l Networks,简称ANN。
人脑的复杂程度是任何自动化系统都不能全面真实地描述出来的。
ANN只是人脑功能基本特征的网络模型,是人脑的模拟与简化[1]。
模糊逻辑控制(Fuzz y Logic Control)简称模糊控制(Fuzz y Control),是一种电脑数字控制技术,以模糊集合论、模糊语言变量和模糊逻辑理论为基础。
1973年,美国的扎德创立了相关的定理。
1974年,Mamdani将其应用到了工业控制中,获得成功,标志着模糊控制论的诞生[2]。
1 人工神经网络1.1 人工神经网络的组成人工神经网络是由大量神经元组成,神经元是功能简化的处理单元(电子、光学元件等),一个输出值由多个输入值确定。
基于BP神经网络的温度模糊PID控制器设计
基于BP神经网络的温度模糊PID控制器设计作者:张咏军王航宇来源:《现代电子技术》2008年第07期摘要:根据BP神经网络对温度控制的要求设计出一种模糊PID控制器,采用误差和误差变化率作为模糊PID控制器的输入,PID参数作为模糊PID控制器的输出,使用一组模糊规则实现对PID参数的在线优化调节。
采用Simulink图形化工具平台对模糊PID控制器和传统的PID控制器进行建模和仿真,结果表明和传统PID控制器相比,模糊PID控制器性能优良,使系统响应速度加快,超调减小。
关键词:BP神经网络;模糊控制;模糊PID控制;隶属函数中图分类号:TP21文献标识码:B文章编号:1004-373X(2008)07-133-Design of Temprature Fuzzy PID Controller Based on BP Neural Network(Xi′an A eronauntical Polytechnic Institute,Xi′an,710089,China)Abstract:A fuzzy PID controller towards BP neural network temprature control is designed with input parameters of error and derivative of error and output parameters of PID parameters which could be regulated sensitively by a set of fuzzy disciplines.The fuzzy PID controller model and PID controller model are set up and simulated through Simulink with the final result showing better characteristics of fuzzy PID control compared with PID control such as minimal overshoot and more quick response.Keywords:BP neural network;fuzzy control;fuzzy PID control;membership function神经网络控制的研究始于20世纪60年代,1960年,widrow和Hoff首先把神经网络用于控制系统,Kilme和McCulloch提出了KMB神经网络模型,并在“阿波罗”登月计划中应用取得良好的效果。
自动化系统的模糊控制与神经网络控制
自动化系统的模糊控制与神经网络控制自动化系统的控制方法多种多样,其中模糊控制和神经网络控制是两种常见而有效的控制方法。
本文将就自动化系统的模糊控制与神经网络控制进行详细的介绍和对比。
一、模糊控制模糊控制是指在系统的控制过程中,根据模糊集合和模糊规则进行推理,以实现对系统的控制。
模糊控制通过模糊集合来描述控制对象的特征,通过模糊规则来描述控制的策略。
模糊控制的主要优点是对系统模型要求不高,适用于复杂的非线性系统。
模糊控制的缺点是控制效果不稳定,对系统的响应较慢。
二、神经网络控制神经网络控制是指利用人工神经网络对系统进行建模,并通过神经网络进行系统控制。
神经网络控制通过训练神经网络来获得系统的映射关系,并通过不断的优化训练来提高控制效果。
神经网络控制的主要优点是适应性强,可以对复杂的非线性系统进行较好的控制。
神经网络控制的缺点是需要大量的训练数据和计算资源。
三、模糊控制与神经网络控制的对比1. 建模方法模糊控制使用模糊集合和模糊规则进行建模,而神经网络控制使用人工神经网络进行建模。
模糊控制的建模过程相对简单,只需通过专家知识确定模糊集合和规则即可。
而神经网络控制的建模过程相对复杂,需要通过大量的训练数据进行神经网络的训练和优化。
2. 控制效果模糊控制对系统的控制效果常常较差,对于复杂的非线性系统,模糊控制的精度和稳定性均较低。
而神经网络控制对系统的控制效果较好,可以对复杂的非线性系统进行较精确的控制。
神经网络控制可以通过不断的训练和优化提高控制效果,并适应系统动态变化。
3. 训练需求模糊控制的训练过程相对简单,只需确定模糊集合和规则即可。
而神经网络控制的训练过程相对复杂,通常需要大量的训练数据和计算资源。
神经网络控制的训练需要通过反向传播算法等方法来不断优化网络参数,提高控制效果。
4. 适用范围模糊控制适用于复杂的非线性系统,特别是对于模糊规则较为明确的系统。
神经网络控制适用于复杂的非线性系统,并且对于系统的模糊规则不敏感,对于模糊性较强的系统具有更好的控制效果。
一种基于CMAC神经网络的模糊控制器设计
摘要:对于存在外在的环境干扰和 系统参数 时变的非线性 系统来说 , 传统 的小脑模型需要重瓤学 习合适的权重 参数 , 这种学 习式的设计方 法 是 相 当耗 时 的 。 了 改善 这 种 情 况 。 文提 出 了模 糊 控 制 与 小 脑模 型 为 本
结 台 的方 式 , 够 有效 地 对 未 知 的 非 线 性 模 型 系统 进 行 实 时控 制 。 通 能
旦 盈
盛墨旦
仪器 仪表用 户
d i1 .9 9 ji n 17 — 4 .0 0 O .0 o:0 3 6 /.s . 6 11 12 1 . 10 8 s 0
一
种基 于 C MAC神 经 网络 的模 糊 控 制器 设计
冯 超, 李 兵
( 河北理 工大 学 计 算机 与控 制学 院 , 山 0 3 0 ) 唐 6 0 9
中图分类号 :T 2 3 P 7
文献标识码 :A
F z y c n r l r d sg a e 1 a CM AC u z o tol e in b s d O1 e
n ur ln t r e a e wo k
F ENG a .LI Bi g Ch o n
向量 。为 。 ) = ( , , , ) ( … () 3
p u onr e os e este d ana eso h wo c to t o ndc t oU rp s ss h a v tg fte t onr lmeh- o s T i lt n rsut e ea h tF d hesmua i e l rv I a CMAC sc p l O g arn— o s t i a abe t u a
等。 其次 , C 在 MAC的分布表达 中 , 一个值 由散布于许多计算单 元 的活性模 式表 示 , 每个计算 单元 又涉及许 多不 同值 的表达 , 因此每个计算 单元都 有一个感 受野 ( ee t ef l) 即它表 R cpi ed , vi 达所有值 的集合 , 这相 当于 每个 计算单 元都 对应 一个 模糊 集 合, 或者说感受野相 当于隶属 函数 。 这正 是它们能 够结合 的一 个 基础 。 从计算 的角 度来看 , MA C C中输 入 向量到关 联存储 空 间的映射与模糊 算法 中计 算 的匹配 度相对 应 , 计算 权重 之 且 和得出 C A M C的输 出与模糊算法 中清晰化相对应 。 在传统 C C中第 . 输入 激活 C个相 连的小区域 , C MA 个 这 个 相连 的小 区域 内容 为 1 而其 它小 区域 的内容为 0 即 , ,