自动控制采样系统
1.4 自动控制系统的分类

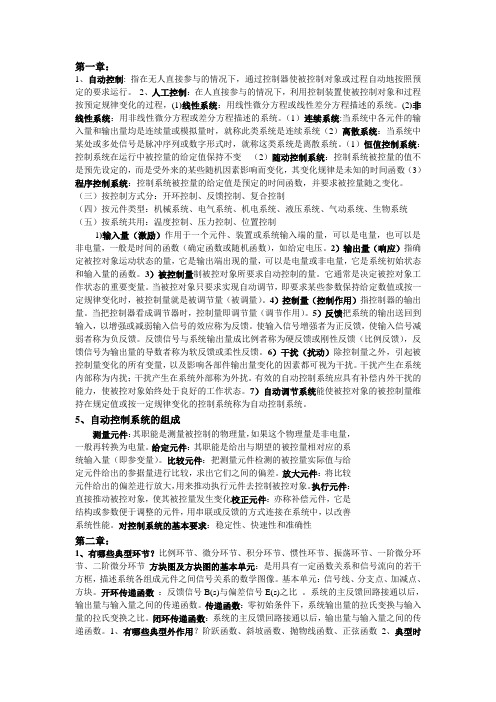
输入 + A/D
--
计算 机
输出
D/A
放大器
执行器
被控对象
反馈装置
采样数字控制系统结构图
广东交通职业技术学院机电工程系
18:18
4. 按输入量变化的规律分类
1) 恒值控制系统(Fixed Set-Point Control System) 特点是:系统的输入量是恒量,并且要求系统 的输出量相应地保持恒定。例如电机速度控制、水 位控制等。
且要求输出量随之变化。例如数控伺服系统以及一些 自动化生产线等。
广东交通职业技术学院机电工程系
18:18
广东交通职业技术学院机电工程系
18:18
2) 非线性系统(Non Liner System)
特点是:系统中含有非线性元件,如具有死区、 出现饱和等非线性特性的元件,它的输出量与输入 量间的关系要用非线性微分方程来描述。
广东交通职业技术学院机电工程系
18:18
2. 按系统中的参数对时间的变化情况 1) 定常系统(Time-Invariant System) (又称时
1.4 自动控制系统的分类
自动控制系统可以从不同的角度来进行分类, 常见的有以下几种。
1. 按系统的输出量和输入量间的关系分类 1) 线性系统(Liner System) 特点是:系统全部由线性元件组成,它的输出
量与输入量间的关系用线性微分方程来描述。
线性系统的主要特点是具有叠加性和齐次性,即 当c1(系t)和统c的2(t输),入则分当别输为入r1为(t)r和(t)r=2a(t1)r时1(t,)+对a2r应2(t的)时输,出输分出别量为 为c(t)=a1c1(t)+a2c2(t),其中为a1、a2为常系数。
自动控制原理课件:采样控制系统的分析

例8-2:试求函数 f(t)=1(t) 的z变换。
解:
f (kT) =1(kT) =1
(k=0,1,2,3….)
F ( z ) f (kT ) z k 1 1 z 1 1 z 2
k 0
1 z k
通过外,一些高频分量也允许通过。
9
8.3
采样控制系统的数学基础
例8-1:求如下系统采样后输入到采样后输出的传递函数
解:取∗ = ,则 ∗ = ,连续对象的输出为
= − ⇒ ∗ = () + − − + − − + ⋯
⇒
(Discrete-time signal)
离散信号通常是按照一定的时间间隔对连续的模拟信号进行采样而
得到的,又称采样信号。
脉冲采样(理想情形)
1
0
t
T ( t )
理想采样器 对应脉冲序列 = σ∞
=−∞ ( − )
t
0
T
2T
8.2
采样过程和采样定理
按一定的时间间隔对连续信号采样,将其变换为在时间上离散的脉冲序列
线性采样系统稳定的充要条件是,闭环系统的全部特征根均位于
z平面的单位圆内,即满足特征根皆
i 1,i 1,
2,
,n
问题:高阶系统求取特征根不容易,如何不用求解特征方程的根
就能判别线性采样系统的稳定性呢?
问题:如何推广应用劳斯稳定判据?
首先要通过双线性变换
w 1
z
w 1Байду номын сангаас
将Z平面的单位圆映射到W平面的虚轴,然后在W平面中应用
《自动控制原理》名词解释
第一章:1、自动控制: 指在无人直接参与的情况下,通过控制器使被控制对象或过程自动地按照预定的要求运行。
2、人工控制:在人直接参与的情况下,利用控制装置使被控制对象和过程按预定规律变化的过程,(1)线性系统:用线性微分方程或线性差分方程描述的系统。
(2)非线性系统:用非线性微分方程或差分方程描述的系统。
(1)连续系统:当系统中各元件的输入量和输出量均是连续量或模拟量时,就称此类系统是连续系统(2)离散系统:当系统中某处或多处信号是脉冲序列或数字形式时,就称这类系统是离散系统。
(1)恒值控制系统:控制系统在运行中被控量的给定值保持不变(2)随动控制系统:控制系统被控量的值不是预先设定的,而是受外来的某些随机因素影响而变化,其变化规律是未知的时间函数(3)程序控制系统:控制系统被控量的给定值是预定的时间函数,并要求被控量随之变化。
(三)按控制方式分:开环控制、反馈控制、复合控制(四)按元件类型:机械系统、电气系统、机电系统、液压系统、气动系统、生物系统(五)按系统共用:温度控制、压力控制、位置控制1)输入量(激励)作用于一个元件、装置或系统输入端的量,可以是电量,也可以是非电量,一般是时间的函数(确定函数或随机函数),如给定电压。
2)输出量(响应)指确定被控对象运动状态的量,它是输出端出现的量,可以是电量或非电量,它是系统初始状态和输入量的函数。
3)被控制量制被控对象所要求自动控制的量。
它通常是决定被控对象工作状态的重要变量。
当被控对象只要求实现自动调节,即要求某些参数保持给定数值或按一定规律变化时,被控制量就是被调节量(被调量)。
4)控制量(控制作用)指控制器的输出量。
当把控制器看成调节器时,控制量即调节量(调节作用)。
5)反馈把系统的输出送回到输入,以增强或减弱输入信号的效应称为反馈。
使输入信号增强者为正反馈,使输入信号减弱者称为负反馈。
反馈信号与系统输出量成比例者称为硬反馈或刚性反馈(比例反馈),反馈信号为输出量的导数者称为软反馈或柔性反馈。
自动控制原理第七章采样控制系统

第三节 信号复现与零阶保持器
一. 信号保持 把离散信号转换为连续信号,称为信号保持,该装置称
保持器。 保持器:用离散时刻信号复现连续时刻信号。
二. 零阶保持器
1. 作用:把采样信号e*(t) 每一个采样瞬时值e(kT)一直保持到下一个采 样瞬间e[(k+1)T], 从而使采样信号 e*(t)变成 阶梯信号eh(t)。
一阶保持器比零阶保持器信号恢复更
0 T 2T 3T 4T 5T 6T t
精确, 但相位滞后增加, 对稳定性不利.
图7-11 一阶保持器输出特性
第四节 Z变换理论
同拉氏变换一样, 是一种数学变换. 离散信号e*(t)的 拉氏变换为:
E*(s) e(nT )enTs n0
各项均含有 esT 因子,为S的超越函数。为便于应用,对 离散系统的分析一般采用Z变换.
G 0 ( s ) 1 s [ 1 e s] T 1 s 1 e 1 s T 1 s 1 1 s 1 T 1 T sT
零阶保持器的频率特性
信号e(t)在t = nT 及t = (n+1)T 之间的数值可以用一个级数来描述
单位脉冲响应
G h(s)L [gh(t) ]S 1S 1e TS 1 Se TS
G 0(j
)1ejT2sin T/(2 )ejT2 j
幅频特性: G 0(j)Tsi( n/ / ( s)s)2 s si( n/ / ( s)s)
上式是 eTs 的有理函数. 但 eTs是含变量S的超越函数,不便进行分析和运算, 因此常用Z变换代替拉氏变换。
三. 采样定理
从理论上指明了从采样信号中不失真的复现原连续信号 所必需的理论上的最小采样周期T.
(自动控制原理)采样控制系统
且有 deg M( s ) ≤ deg N( s )以及 deg N( s ) = n . 展开成部分分式和的形式, 将 X(s)展开成部分分式和的形式,即
n
Ai X(s)= ∑ i =1 s + si 式中: 的零点, 的极点, 式中: i 为 N(s)的零点,即 X(s) 的极点,且设为 s
①线性性质 若 Z[ x1(t )] = X 1( z ), Z[ x2(t )] = X 2( z ) , a1, a2为常数 则 Z[a1 x1(t )+ a2 x2(t )] = a1 X 1( z )+ a2 X 2( z ) ②平移定理 若 Z[ x(t )] = X( z )
Z[ x(t + kT )] = z k X( z )− z k − j x( j ) ∑ 则 j =0 Z[ x(t − kT )] = z − k X( z ) 若 k = 1时,有 Z[ x(t + T )] = z[ X( z )− x(0)] Z[ x(t − T )] = z −1 X( z )
若上述级数收敛,则称 E ( z ) 为采样信号的z变换。 为采样信号的z变换。 若上述级数收敛, 为了书写方便, 为了书写方便,通常写成 E ( z ) = Z [e(t )] ,但仍理 变换。 解为是对取 Z 变换。
(2)常用函数的 Z 变换和 Z 变换的性质 变换见表8 1)常用普通时间函数的 Z 变换见表8-1 表8-1 Z 变换表
* n=0
+∞
( n 式中 e nT ) = e t )t = nT , (
自控综合实验报告

一、实验目的1. 理解自动控制系统的基本原理,掌握控制系统设计的基本方法。
2. 学习使用Matlab/Simulink进行控制系统仿真,验证理论分析结果。
3. 掌握PID控制原理及其参数整定方法,实现系统的稳定控制。
4. 了解采样控制系统的特性,掌握采样控制系统的设计方法。
二、实验仪器与设备1. 计算机:一台2. Matlab/Simulink软件:一套3. 控制系统实验平台:一套(含传感器、执行器、控制器等)三、实验内容1. 连续控制系统设计(1)根据给定的系统传递函数,设计一个稳定的连续控制系统。
(2)使用Matlab/Simulink进行仿真,验证理论分析结果。
(3)调整系统参数,观察系统性能的变化。
2. PID控制(1)根据给定的系统传递函数,设计一个PID控制器。
(2)使用Matlab/Simulink进行仿真,验证PID控制器的效果。
(3)调整PID参数,观察系统性能的变化。
3. 采样控制系统(1)根据给定的系统传递函数,设计一个采样控制系统。
(2)使用Matlab/Simulink进行仿真,验证采样控制系统的效果。
(3)调整采样频率和控制器参数,观察系统性能的变化。
四、实验步骤1. 连续控制系统设计(1)建立系统传递函数模型。
(2)根据系统要求,选择合适的控制器类型(如PID控制器)。
(3)设计控制器参数,使系统满足稳定性、稳态误差和动态性能等要求。
(4)使用Matlab/Simulink进行仿真,验证系统性能。
2. PID控制(1)根据系统传递函数,设计PID控制器。
(2)设置PID控制器参数,使系统满足性能要求。
(3)使用Matlab/Simulink进行仿真,验证PID控制器的效果。
(4)调整PID参数,观察系统性能的变化。
3. 采样控制系统(1)建立系统传递函数模型。
(2)根据系统要求,设计采样控制系统。
(3)设置采样频率和控制器参数,使系统满足性能要求。
(4)使用Matlab/Simulink进行仿真,验证采样控制系统的效果。
自动控制原理第七章采样系统

n>m
pi— 极点
Ai— 待定系数
第二节 采样控制系统的数学基础
例 求F(s)的z变换F(z)。
F (s)=
1 S(S+1)
解:
F (s)=
1 S(S+1)
=
1 S
–
1 S+1
F (z)=
z z–1
–
z z–e –T
=
z(1–e –T ) (z–1)(z–e–T
)
第二节 采样控制系统的数学基础
例 求F(s)的z变换F(z)。
+
=Σ k=0
8
f
(kT)∫0∞δ(t
–
kT
)e–stdt
+
=Σ f(kT)e –kTS k=0
第二节 采样控制系统的数学基础
二、求Z变换的方法
1.级数求和法
根据定义式展开
+
F (z)= Σ f (kT) k=0
= f (0)z0 + f (T)z-1 + f (2T)z-2 + f (3T)z-3 + ··· 利用级数求和法可求得常用函数
+(S+2)
S+3 (S+1)(S+2)
z z–eST S=-2
F (z)=
2z z–e –T
–
z–e
z
–2T
=
z2+z(e-T -2e-2T z2-(e-T +e-2T )z+e
)
-3T
ቤተ መጻሕፍቲ ባይዱ
第二节 采样控制系统的数学基础
三、Z变换的基本定理
例 z变求换Z[的t –基T 本] 定理为z变换的运算 提供了方便。
自动控制原理 第1章_自动控制系统的基础知识

第1章 自动控制系统的基础知识
教学重点
了解自动控制系统的基本结构和特点及其 工作原理; 了解闭环控制系统的组成和基本环节; 掌握反馈控制系统的基本要求-稳定性、 动态和稳态性能指标; 学会自动控制系统的类型及本质特征。
●
1.2 自动控制系统的基本原理
1.自动控制系统的基本概念
自动控制:没有人的直接干预,利用控制装置使被控对 象(如生产设备)的工作状态或被控制量按照预定的规 律运行。 ● 自动控制系统:实现上述自动控制的目的,由相互联系 和制约的各部件组成的具有特定功能的整体称为自动控 制系统。
●
2.自动控制系统的组成
教学难点
自动控制系统的基本工作原理,自动控制 系统的结构及特点、组成和基本环节,自 动控制系统的性能指标,自动控制系统的 类型。
概述:在人类社会走向信息化的今天,计算机、 通信、信息处理技术的发展对社会经济以及人类 生活产生了巨大影响。其中,自动控制作为一种 技术手段已经广泛地应用于工业、农业、国防以 及日常生活和社会科学的各个领域。 自控理论:自动控制理论就是研究自动控制共同 规律的科学技术,自动控制原理仅是工程控制论 中的一个分支,是研究控制系统分析和设计的一 般理论。 本章内容:本章是自动控制技术及应用的基础, 主要介绍自动控制的基本原理和概念,自动控制 系统的组成和分类,以及自动控制系统的性能指 标等。
●
2.现代控制理论
●
● ●
研究对象:多输入-多输出系统(线性定常或非 线性时变) 研究方法:状态空间方法 代表人物:庞特里亚金(极大值原理)、贝尔曼 (动态规划原理)、卡尔曼(卡尔曼滤波)等
3.大系统理论和智能控制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 离散系统:系统中有一处或多处为离散信号的系统称离散系统。 典型的计算机控制系统即为离散系统的一种。其原理图如下:
r(t) e(t) _
e*(t)
u*(t)
uh(t)
A/D
数字控制器
D/A
数字计算机
c(t) 被控对象
1. 问题的提出
连续信号e(t)经过采样后,只能给出采样点上的数值,
不能知道各采样时刻之间的数值。从时域上看,采样过程损失
了e(t)所含的信息。
怎样才能使采样信号e*(t)大体上反映e(t)的变化规律呢?
t (a)连续信号
t
(b)离散信号
2. 定性分析
如果连续信号e(t)变化缓慢(最大角频率max较低〕,而采样角频率s比 较高(即采样周期T=2/s较小〕,则e*(t)基本上能反映e(t)的变化规律。
n0
n0
例8.1 e(t)=eat,试写出e*(t)表达式。 解e: (t) eanT(tnT )
n0
输入信号e物(t理)进意行义调:制可的看过成程是,单如位右理图想所脉示冲。串T (t) 被
在图中,T(t)为载波信号;e(t)为调制信号; e*(t)为理
想输出脉冲序列。
➢采样定理 ---设计控制系统必须严格遵守的一条准则。
如:y(z) =z-1x(z),则:y(n)=x(n-1) (3)收敛特性,通常|z|>1,所以级数是收敛的.
第八章 采样系统理论
8.1 离散系统的基本概念 8.2 信号的采样与保持 8.3 Z变换与Z反变换 8.4 离散系统的数学模型 8.5 稳定性与稳态误差 8.6 离散系统的动态性能分析 本章作业
End
8.1 离散系统的基本概念
• 系统分为连续系统、采样系统和数字系统。另外还有离散事 件系统。
• 采样系统、断续系统、离散控制系统基本等价,从实现手段 上又称计算机控制系统,在取值上数字化,又称数字系统。
T
• 所以一般采用最简单的零阶保持器。
零阶保持器的工程实现
eTs 1Ts1T2s2 1Ts 2
Gh(s)
1eTs s
1
1eTs s
1 1 1Ts
s
T 1Ts
所以采用RC电路即可以实现零阶保持.
8.3 Z变换与Z反变换
8.3.1 Z变换性质 8.3.2
8.1 8.2 8.4 8.5 8.6
1. Z变换的定义 E*(s)L[e*(t)] e(nT )enTs
▪ 信号复现
将数字信号转换复原成连续信号的过程称信号 复现。该装置称为保持器或复现滤波器。
▪ 零阶保持器 f(k T t)f(k T ),0 t T
零阶保持器是最简单也是工程中使用最广泛的保持器。零 阶保持器的输入输出特性可用下图描述。
e*(t)
eh(t)
e*(t) 零阶保持器 eh(t)
t
t
零阶保持器的数学表达式为e(nT+△t)=e(nT);其脉冲响应 为gh(t)=1(t)-1(t-TG )h ,(s)传递L [函gh(数t)为 ]1 se sT s 1s eTs
Ts
• 三角形保持器: f(k T t) f(k T ) f(k T T ) f(k T )t,0 t T
G(s)eTs (1eTs )2
T
T Ts
• 实际上是不能实现的,一般只有采用滞后一步的三角形保 持器: f( k T t) f( k T T ) f( k T ) f( k T T )t,0 t T
频率特性:
G (j )1ejTej2 Tej2 Tej2 TTsin2 Tej2 T
j
2j
T
2
2
可以看出,零阶保持器对部分高频 信号不能衰减, 同时存在不同滞后。
一阶保持器和三角形保持器
• •
一示阶意保图持和器频:率f 特(k 性T 图t) f(k T ) f(k G T ) ( s)T f(k TT ( 1T ) Tt,s0 )( 1t eT Ts)2
➢采样过程 数学描述:把连续信号变换为脉冲序列的装置称
为采样器,又叫采样开关。采样过程可用下图表示。
e(t)
e*(t)
e(t) S e*(t)
t
t
ee*(*t()t )= e(et()nδT)T((tt) , 其nT 中)对T上(t)式取 n0拉(t氏n变T)换为,得理E 想*(单s) 位L脉[e*冲(t)序] 列e。(n则T )e:nT
测量元件 计算机控制系统典型原理图
A/D:模数转换器,将连续的模拟信号转换为离 散的数字信号。包括采样与量化两过程。
D/A:数模转换器,将离散的数字信号转换为连
续的模拟信号。包括解码与复现两过程。
t
(a) 连续信号
t
(b) 离散信号
t
(c) 离散量化信号
❖离散控制系统的特点
1. 校正装置效果比连续式校正装置好,且由软件实 现的控制规律易于改变,控制灵活。
2. 采样信号,特别是数字信号的传递能有效地抑制 噪声,从而提高系统抗干扰能力。
3. 可用一台计算机分时控制若干个系统,提高设备 利用率。
4. 可实现复杂控制规律,且可以在运行中实时改变 响应参数。
8.2 信号的采样与保持
8.2.1 采样过程与采样定理 8.2.2
8.1 8.3 8.4 8.5 8.6
3. 采样定理(香农定理) 如果采样器的输入信号最高角频率为ωmax,则只有当采样频率 ωs≥2ωmax,才可能从采样信号中无失真地恢复出连续信号。
设ws为采样频率,wa为系统信号的最大频率,由单位脉冲序列的傅氏级数:
(T t)=
n=0
1 TS
e-jnwst
则采样后信号为:X*
(t)
x(t
).(T t)=
令z=eTs , 则 E(z) e(nT)zn=e(0)+e(nT0)z-1+e(2T)z-2+…
n0
即为Z变换的定义式。 称E(z)为e*(t)的Z变换, 记作 Z[e*(t)]=E(z), 或 Z[e(t)]=E(z)
注意的问题: (1)Z变换只在采样点定义. z=eTs 或s=1/T.lnz不是等价关系. (2)Z带有明显的时间信息,z-1称为一步延迟因子,S不具有这个性质.
1 TS
x(t)e-jnwst
又根据拉氏变换衰减定理:x(t)e-jnwst X(s jnws )
所以:X*
(s)
1 TS
X(s jnws )
其傅立叶变换为:s jw, X (w) X ( jw)
即:X*
(w)
ቤተ መጻሕፍቲ ባይዱ
1 TS
X(jw jnws )
8.2.2 信号复现及零阶保持器 8.2.1