车辆操纵动力学稳定性分析
四轮转向车辆操纵稳定性仿真分析
宋凯凯▶◀……………………………………………………………………………四轮转向车辆操纵稳定性仿真分析前言随着科技的进步和汽车产业的发展,人们对于车辆操纵稳定性、舒适性和安全性的要求不断提高,四轮转向(Four-wheel steering ,4WS )作为一种有效改善车辆操纵性能的技术,吸引了国内外众多研究人员[1]。
使用4WS 技术的主要目的有:①减少车辆质心侧偏角β;②减少车辆横摆率与车辆横向加速度之间的相差;③增加轮胎横向力的裕度,使其远离饱和状态[2]。
运用4WS 技术可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速时行驶更加灵活、便于泊车。
同时,4WS 技术还可以大大地改善汽等瞬态响应指标,提高高速行驶时的操纵稳定性和舒适性[7]。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件[3]。
Simulink 是Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标[2]。
本文基于Matlab/simulink 对四轮转向车辆的控制系统进行了设计,并对4WS 车辆的操纵稳定性进行了仿真研究。
4WS 车辆运动数学模型4WS 车辆模型根据自由度不同可分为二自由度、三自由度以及多自由度模型。
高自由度车辆模型虽然能较好地反映出汽车的运行状况,但研究起来困难很大。
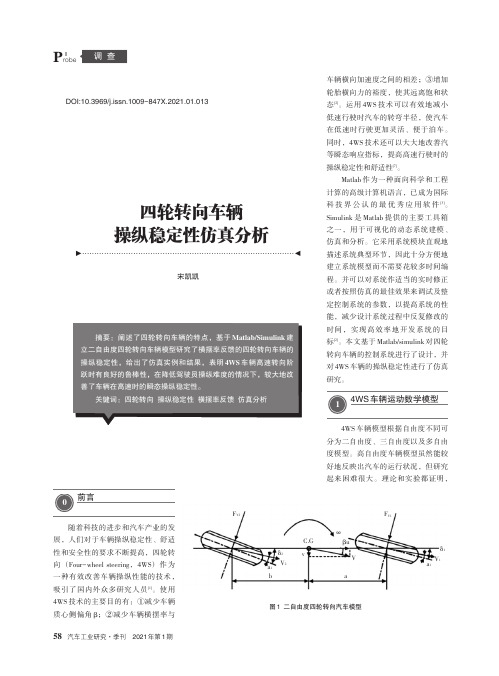
理论和实验都证明,F Y2F Y1δ2V 2a 1bavV C.Gβu ωV 1δ1a 1图1二自由度四轮转向汽车模型在正常车速的非紧急状态和小转向角情况下,包含横摆角速度和质心侧偏角的线性二自由度自行车模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作[4][8][10]。
汽车理论5汽车的操纵稳定性
第5章汽车的操纵稳定性学习目标通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。
汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。
在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。
此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。
一辆操纵性能良好的汽车必须具备以下的能力:(1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。
(2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。
操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。
如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。
汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。
它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。
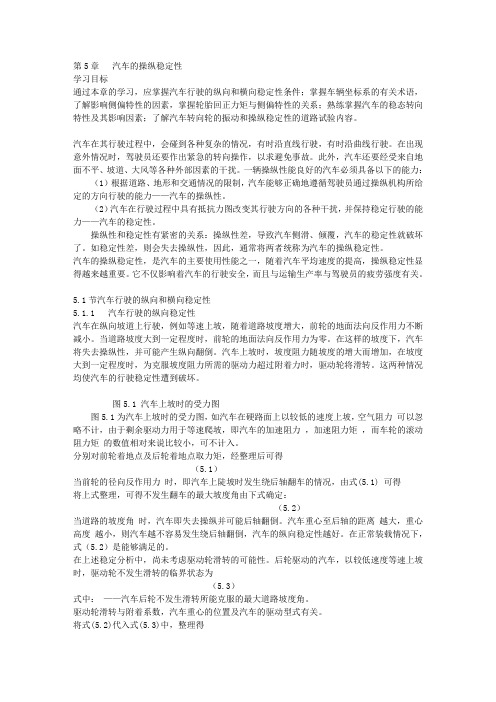
5.1节汽车行驶的纵向和横向稳定性5.1.1 汽车行驶的纵向稳定性汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。
当道路坡度大到一定程度时,前轮的地面法向反作用力为零。
在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。
汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。
这两种情况均使汽车的行驶稳定性遭到破坏。
图5.1 汽车上坡时的受力图图5.1为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力可以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力,加速阻力矩,而车轮的滚动阻力矩的数值相对来说比较小,可不计入。
操纵稳定性介绍

1、问题的由来
“反应迟钝”:驾驶员转向指令已发出相当时间,但汽车还 没有转向反应,或转向过程完成的过慢。 “丧失路感”:正常汽车的转弯的程度,会通过转向盘在驾 驶员手上产生相应的感觉。有些操纵性能不好的汽车,在车 速较高或急剧转向时会丧失这种感觉。这会增加驾驶员的操 纵困难或影响驾驶员做出正确的判断。 “晃”:驾驶员给出稳定的转向指令,但汽车却左右摇摆, 行驶方向难于稳定。
2、操纵稳定性概念
汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的条 件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向 行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行 驶的能力。 汽车的操纵稳定性不仅影响到汽车驾驶的操纵方便程度,而 且也是决定高速汽车安全行驶的一个主要性能,所以人们称 之为“高速车辆的生命线”。汽车的操纵稳定性日益受到重 视,已成为衡量现代汽车的主要性能之一 。
6、操稳的评价标准
(1)GB/T 6323.1-1994《蛇行试验 》; (2)GB/T 6323.2-1994《角阶跃输入特性试验 》; (3)GB/T 6323.3-1994《角脉冲输入特性试验 》; (4)GB/T 6323.4-1994《回正性能试验 》; (5)GB/T 6323.5-1994《转向轻便性能试验 》; (6)GB/T 6323.6-1994《稳态回转试验 》; (7)QC/T 480-1999《汽车操纵稳定性指标限值与评价方 法 》。
4、操稳分析内容
汽车的操纵稳定性涉及的问题较广泛,它需要采用较多的物理参量从多方 面进行评价
4、操稳分析内容
5、操稳评价方法
汽车性能最后通过试验来进行测定与评价。试验中的性能评 价有主观评价 客观评价 主观评价和客观评价 客观评价法是通过测试 主观评价 客观评价两种方法。客观评价法 客观评价法 仪器测出表征性能的物理量如横摆角速度、侧向加速度、转 向力等来评价操纵稳定性的方法。主观评价法 主观评价法就是感觉评价, 主观评价法 其方法是让试验评价人员根据试验时自己的感觉来进行评价, 并按规定的项目和评分方法进行评分。
操稳和平顺性资料
在频谱图上,将频率分成 1/3 倍频带。任意频带的上限频率是其中心频率的 1.12 倍,而 其下限频率是其中心频率的 0.89 倍,而且某一频带的上限频率即为下一频带的下限频率。 ISO2631“疲劳-降低功效界限”在 1-80Hz 范围内规定的 1/3 倍频带中心频率为 1,1.25, 1.6……80 分成不同的频带,各段的上下限频率与中心频率的关系为: fu = 1.12 fc ,
侧翻工况下的操纵性能,综合评价汽车行驶稳定性及乘坐舒适性。 ü 蛇行试验基T 6323.2—1994 《汽车操纵稳定性试验方法 转向瞬态响应试验 (转向盘转角阶跃输 入) 》 ü 仿真模型为所建的整车开环系统动力学模型, 整车所处状态为满载状态。 使整车动 力学模型以试验车速沿直线行驶, 在某一时刻快速移动转向齿条使前轮达到预定转 角,固定该转角一段时间,使汽车进入转弯运动状态。 ü 根据仿真结果,读取汽车的运动状态——横摆角速度、车身侧倾角、侧向加速度等 运动参数的响应情况。 GB/T 6323.3—1994 《汽车操纵稳定性试验方法 转向瞬态响应试验 (转向盘转角脉冲输 入) 》 ü 仿真模型为所建的整车开环系统动力学模型, 整车所处状态为满载状态。 使整车动 力学模型以试验车速沿直线行驶, 然后给转向盘一个三角脉冲转角输入, 试验时向 左(或向右)转动转向盘,并迅速转回原处,直至汽车回复到直线行驶位置。 ü 根据仿真结果,可将横摆角速度和侧向加速度处理为在时间域的响应情况。
4 操纵稳定性分析
操纵稳定性分析用于研究车辆在得到如转向、制动或油门等输入信号下的动力学响应。 例如: 你可以分析当车辆在以某一个速度行驶时给方向盘一个转角情况下, 其横向加速度的 变化情况。 汽车操纵稳定性是指在驾驶者不感到过分紧张、 疲劳的条件下, 汽车能遵循驾驶者通过 汽车转向系及转向车轮给定的方向行驶, 且当遭遇外界干扰时, 汽车能抵抗干扰而保持稳定 行驶的能力,是汽车动力学的一个重要分支。操纵稳定性好的车辆:应该容易控制;在出现 扰动时,不应使驾驶员感到突然和意外;操纵性能的行驶极限应能清楚地辨别。汽车的操纵 稳定性是影响汽车主动安全性的重要性能之一,因此,如何研究和评价汽车的操纵稳定性, 以获得良好的汽车主动安全性一直是关于汽车的最重要的课题。 在我国, 汽车操纵稳定性研究始于七十年代。 清华大学和长春汽车研究所都同时系统地 开展了这方面研究工作。 各个汽车生产厂也都从自己产品的需要出发, 在不同的程度上进行 了操纵稳定性的试验和研究工作。 我国开展汽车操纵稳定性研究的历史虽不太长, 但吸取了 国外的研究成果和经验,进展较快。
汽车的操纵稳定性详解

转向盘中心区操纵稳定性:指转向盘小转角、低频正弦输入下汽车高 速行驶时的操纵稳定性,它代表了汽车经常行驶工况下的操纵稳定性。
机动性:代表汽车机动灵活性的性能,最小转弯半径是评价汽车机动 性的重要指标。
直线行驶性:侧风稳定性与路面不平度稳定性是汽车直线行驶时在外 界干扰输入下的时域响应。
极限行驶性能:指汽车在处于正常行驶与异常危险运动之间的运动状 态下的特性,它表明了汽车安全行驶的极限性能。
汽车在附着系数较大的路面上作小转向运动,认为是线性区评价; 汽车在附着系数较小的路面作大转向运动,认为是非线性区评价。
5.稳态评价和动态评价
稳态:指没有外界扰动、车速恒定、转向盘上的指令固定不变,汽 车的输出运动达到稳定平衡的状态。
稳态评价:汽车达到稳态状态的评价。 动态评价:汽车从接收转向指令或扰动指令开始到达到稳态状态之 前的运动评价。 稳态不存在操纵稳定性问题,所有的操纵稳定性问题都是动态反应 问题。
第2页
汽车操纵稳定性
定义:指在驾驶人不感觉过分紧张、疲劳的条件下,汽车能按照驾 驶人通过转向系及转向车轮给定的方向(直线或转弯)行驶;且当受 到外界干扰(路不平、侧风、货物或乘客偏载)时,汽车能抵抗干扰 而保持稳定行驶的性能。
操纵性:即汽车能够确切地响应驾驶人通过转向盘给定的转向指令 行驶的能力,反映了汽车与驾驶人配合的程度。
2021/1/30
5.1.2 汽车操纵稳定性的基本内容和评价指标
➢ 汽车操纵稳定性需要采用较多的物理量从多个方面进行 评价,见表书本中的5-1。
转向盘角阶跃输入下的稳态响应和瞬态响应:是表征汽车操纵稳定性 的转向盘角位移输入下的时域响应,是汽车操纵稳定性的基础特性。
汽车操纵稳定性试验解析!

汽车操纵稳定性试验解析!汽车的操稳性不仅影响到汽车驾驶的操纵方面,而且也是决定汽车安全行驶的一个主要性能;为了保证安全行驶,汽车的操稳性受到汽车设计者很大的重视,成为现代汽车的重要使用性能之一,如何试验并评价汽车的操稳性显得极其重要。
汽车操控稳定性分为两个方面:1、操控性: 指汽车能够确切的响应驾驶员转向指令的能力;2、稳定性:指汽车受到外界扰动(路面扰动或阵风扰动)后恢复原来运动状态的能力。
一、常用试验仪器1、陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角,汽车横摆角速度,车身侧倾角及纵倾角等;2、光束水准车轮定位仪:测车轮外倾角,主销内倾角,主销外倾角,车轮前束,车轮最大转角及转角差;3、车辆动态测试仪:测汽车横摆角速度,车身侧倾角及纵倾角,汽车横向加速度与纵向加速度等运动参数;4、力矩及转角仪:测转向盘转角或力矩;5、五轮仪和磁带机等。
二、试验分类三、稳态回转试验01试验步骤1、在试验场上,用明显的颜色画出半径为15m或20m的圆周;2、接通仪器电源,使之加热到正常工作温度;3、试验开始前,汽车应以侧向加速度为3m/s²的相应车速沿画定的圆周行驶500m以使轮胎升温。
4、以最低稳定速度沿所画圆周行驶,待安装于汽车纵向对称面上的车速传感器在半圈内都能对准地面所画的圆周时,固定转向盘不动,停车并开始记录,记下各变量的零线,然后,汽车起步,缓缓连续而均匀地加速(纵向加速度不超过0·25m/s²),直至汽车的侧向加速度达到6·5m/s²为止,记录整个过程。
5、试验按向左转和右转两个方向进行,每个方向试验三次。
每次试验开始时车身应处于正中央。
02评价条件1、中性转向点侧向加速度值An:前后桥侧偏角之差与侧向加速度关系曲线上斜率为零的点的侧向加速度值,越大越好;2、不足转向度:按前后桥侧偏角之差与侧向加速度关系曲线上侧向加速度2m/s²点的平均值计算,越小越好;3、车厢侧倾度K:按车厢侧倾角与侧向加速度关系曲线上侧向加速度2m/s²点的平均斜率计算,越小越好。
汽车理论课程设计操纵稳定性
汽车理论课程设计操纵稳定性一、操纵稳定性基础车辆操控稳定性是汽车设计与制造中的一项重要指标,也是人们选择车辆时非常看重的重要因素。
对于车辆的操纵稳定性,我们需要了解车辆的基础结构,以及车辆操纵时的力学基础知识。
1.车辆结构基础车辆的机械结构可以分为下底盘和上底盘,底盘中有车轮、转向系统、悬挂系统和制动系统等,而上底盘则由车身和驾驶室组成。
车轮是车辆行驶和转向的关键部位,转向系统控制着车轮的转向,悬挂系统则提供了车辆的稳定性和舒适性,并使车轮的垂直运动与弯曲运动相互独立。
制动系统则控制着车轮的制动,保证了行驶中的安全。
了解车辆结构对于理解车辆的操纵稳定性有着重要的作用。
2.车辆操纵力学车辆的操纵力学涉及力的平衡、作用、转动和传递等基本知识。
在车辆操纵中,我们需要考虑到转向时车辆的转动惯量、车辆的载荷分布、中心重力位置、轮胎与地面之间的摩擦系数等因素,这些因素会影响到车辆的稳定性和操纵性。
了解车辆操纵力学是理解车辆操纵稳定性的必备基础。
二、操纵稳定性的影响因素操纵稳定性是车辆操纵的关键要素,影响着车辆在运动中的稳定性和操纵性。
以下将重点介绍影响车辆操纵稳定性的几个主要因素:1.车速车速是影响车辆操纵稳定性的重要因素。
车辆在高速行驶时,容易出现断层现象,导致车辆失控。
车辆在低速行驶时,容易被侧向风吹偏,同样也会导致车辆失控。
因此,在车辆操纵过程中,需要注意车辆的速度和行驶路况,保持适当的车速和操纵精度,确保车辆的稳定性。
2.路况路况也是影响车辆操纵稳定性的重要因素。
因为路面不平或路面湿滑,车辆容易出现侧滑或打滑现象,从而引起车辆失控。
此外,曲线路段、上坡、下坡等路段也会影响车辆的稳定性。
因此,司机需要结合具体路况,灵活掌握车辆操纵技能,保持车辆的稳定性。
3.车辆结构车辆的结构也是影响车辆操纵稳定性的重要因素。
车辆结构包括车轮、转向系统、悬挂系统和制动系统等,这些系统的性能影响着车辆的操纵和稳定性。
例如,悬挂系统在车辆运动中起到减震作用,能够提高车辆的稳定性和舒适性;而制动系统的合理性能能够保证车辆的安全行驶。
汽车操纵稳定性概述
汽车操纵稳定性概述汽车的操纵稳定性是指车辆在加速、刹车、转弯等操作时,保持良好的稳定性和可控性的能力。
这一特性对驾驶员来说非常重要,因为它直接关系到行车的安全和舒适性。
汽车的操纵稳定性受到多个因素的影响,包括悬挂系统、制动系统、转向系统等。
本文将从这些方面对汽车操纵稳定性进行概述。
首先,悬挂系统对汽车的操纵稳定性起到了关键作用。
悬挂系统主要由弹簧、减振器和稳定杆等组成。
弹簧和减振器能够减缓车辆在通过不平路面时产生的颠簸感,提高悬挂系统的工作效率。
稳定杆可以减少车辆转向时的侧倾,提高车辆的稳定性。
因此,一个良好的悬挂系统对车辆的操纵稳定性起到了至关重要的作用。
其次,制动系统对操纵稳定性也有很大的影响。
制动系统主要由刹车盘、刹车片和刹车油等构成。
当驾驶员需要紧急刹车时,一个良好的制动系统可以迅速减速并能够保持车辆的稳定性。
如果制动系统工作不正常,可能会导致车辆在刹车时出现抱死现象,从而失去了对车辆的控制。
在操纵稳定性方面,转向系统也起到了重要的作用。
转向系统主要由转向机构、转向齿轮和转向轴等构成。
一个良好的转向系统可以提供准确而稳定的转向操作,驾驶员可以更容易地控制车辆的前进方向。
在紧急转弯时,一个稳定的转向系统可以避免车辆失控或侧翻的风险。
此外,轮胎也对汽车的操纵稳定性起到了至关重要的作用。
好的轮胎可以提供良好的抓地力和操控性能,这对车辆的操纵稳定性起到了重要作用。
如果轮胎的磨损过度或者胎压不正确,都可能导致车辆在行驶过程中失去稳定性。
除了这些因素之外,车辆的重心位置也会对操纵稳定性产生影响。
低重心的车辆相对于高重心的车辆在行驶中更加稳定。
因此,现代的汽车设计会尽量将重心降低,以提高车辆的操纵稳定性。
总结起来,汽车的操纵稳定性是一个复杂的系统工程,受到多个因素的影响。
悬挂系统、制动系统、转向系统以及轮胎等都对汽车的操纵稳定性起到了至关重要的作用。
为了提高操纵稳定性,驾驶员应该保持良好的驾驶技巧,同时定期检查和维护车辆的关键部件,以确保其正常工作。
车辆两自由度操纵稳定性simulink模型及分析
m 0
0 I
vr
(C1 (aC1
uc uc
C2 ) bC2
)
muc
(aC1 bC2 uc
(a2C1 b2C2 )
uc
)
v r
C1 aC1
f
转化为标准的状态空间方程为:
X AX BU
其中A P1Q; B
P1R; X
v r
;
输入矢量为U
f
Page 8
转化为标准的状态空间方程为:
m(v ucr) Fyf Fyr Ir aFyf bFyr
(公式 1)
Page 5
由于假设侧片刚度在线性区域,所以Fy= -Cαα(公式2) 在单轨模型中,前轮的侧向速度为
后轮的侧向速度为
vf=v+ar
vr=v-br 当α很小的时候,可以认为tanα≈α 所以:
r
f
u br uc
u ar uc
X AX BU Y CX DU 其中
X
v r
;U
f
(C1 C2 )
A
muc (aC1 bC2
Iuc
)
uc
(aC1 bC2 ) muc
(a 2C1 b2C2 ) Iuc
C1
B
m aC1
C
0
I
1D 0
Page 9
利用simulink进行仿真
Page 10
以状态方程建立的的仿真图
最后将公式2和公式3代入公式1可得系统微分方为后轮侧偏刚度为前轮侧偏刚度其中bcacacbcacbcacbcacmubuax输入矢量为其中作为系统的输入放在方程右边并以状态空间方程的形式来表示则可得到系统的运动方程为
线性二自由度车辆操纵模型
基于模型跟踪最优控制的3轴全轮转向车辆操纵稳定性分析
基于模型跟踪最优控制的3轴全轮转向车辆操纵稳定性分析基于模型跟踪最优控制的3轴全轮转向车辆操纵稳定性分析3轴全轮转向车辆是一种新型的汽车设计,该车的4个车轮均配备有电控制动系统,能够对每个车轮进行独立控制,实现方向转换和车身稳定控制。
本文将从控制理论角度出发,以模型跟踪最优控制为基础,对3轴全轮转向车辆的操纵稳定性进行分析。
控制系统设计对于3轴全轮转向车辆,其控制系统需要能够实时获取车辆的动态特性,并根据当前情况进行调整。
本文采用模型跟踪最优控制方法,通过预测的车辆状态与实际车辆状态之间的误差来实现控制。
具体实现流程如下:1.建立车辆模型:基于牛顿运动定律,建立车辆模型,并考虑侧滑角、加速度和方向改变的影响。
2.建立控制器模型:设计状态反馈控制器,使用LQR方法求解最优增益矩阵。
3.实现控制器:将计算得到的最优增益矩阵与车辆控制系统集成,通过检测车辆当前状态并将其输入到控制器模型中,实现对车辆的控制。
模型跟踪最优控制的优点是能够利用最优性原理,将控制信号与车辆动态特性进行有效耦合,能够快速响应变化,并在时间和能量上实现最优控制。
而3轴全轮转向车辆可以通过动态调整每个车轮的转向角度进行操纵,可以实现更加精准和高效的控制效果,从而实现更高的操纵稳定性。
操纵稳定性分析在操纵稳定性分析中,关键因素是车辆的转向操纵能力和响应时间。
通过控制器优化,可以将车辆的转向响应时间缩短,提高稳定性。
同时,对于高速行驶时的侧向滑动幅度,控制器可以使车辆保持在短时间内稳定,并在相应时间段内实现转向。
在转向过程中,每个车轮的控制角度应该同时进行动态调整,从而让车辆保持平稳状态。
总结本文以3轴全轮转向车辆为例,针对其操纵稳定性进行了探讨。
通过模型跟踪最优控制的方法,实现了车辆控制系统的优化。
同时,还研究了将每个车轮的控制角度动态调整应用于转向控制中,实现更高效的控制。
这一研究成果改善了传统控制模型的不足之处,带来了更加精准、快速、高效的汽车操纵稳定性控制方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车辆操纵动力学摘要:汽车的前轮转角和横摆角速度是衡量汽车稳定性的两个重要指标。
汽车在行驶过程中,由于路况的各种不确定因素,驾驶员可能会采取紧急制动和转向的行为来避免交通事故。
在此过程中汽车的操纵稳定性会起到关键性的作用,因此对于汽车的稳定性的分析必不可少。
本文建立了汽车线性二自由度汽车模型,以前轮转角为输入,运用MATLAB进行时域分析。
对不同车型的在相同行驶速度、相同前轮转角下分析横摆角速度瞬态响应;在相同行驶速度下,在不同前轮转角输入下分析达到相同加速度的横摆角速度瞬态响应;随着车速增加,分析车辆瞬时转向响应与系统特征根之间的关系。
关键词:横摆角速度;前轮转角;特征根引言车辆稳定性控制是汽车主动安全领域研究的热点,已有的研究如以车辆横摆角速度、质心侧偏角、轮胎的滑移率、侧向加速度及这些变量联合作为控制变量的控制策略研究。
本文主要考虑车辆横摆角速度和前轮转角对车辆操纵稳定性的影响,进一步利用MATLAB得出状态空间矩阵的特征根变化趋势,了解车辆瞬时响应与其之间的关系。
1建立汽车数学模型假设汽车的驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用,忽略左、右车轮轮胎由于载荷的变化而引起轮胎特性的变化以及轮胎回正力矩的作用。
汽车模型即可简化为线性二自由度模型,如图1。
图1 线性二自由度模型根据假设以及图1模型,二自由汽车收到的外力沿y轴方向的合力与绕质心的力矩和为:⎩⎨⎧-=∑+=∑2121cos cos Y Y Z Y Y Y bF aF M F F F δδ (1) 式中,FY1、FY2为地面对前后轮的侧向反作用力;δ为前轮转角;a 、b 分别为汽车前、后轮至质心的距离。
汽车前、后轮侧偏角与其运动参数有关,如图1所示,汽车前、后轴中点的速度u 1、u 2,侧偏角为α1、α2,质心的侧偏角为β,β=v/u 。
ξ是u 1与x 轴的夹角,其值为:uawu aw v r r +=+=βξ (2) 根据坐标系规定,由式(2)得,前、后轮侧偏角为:⎪⎪⎩⎪⎪⎨⎧-=-=-+=--=u bw u bw v uaw r r r βαδβξδα21)( (3) 考虑到δ角较小,前、后轮所受到的侧向力与相应的侧偏角成线性关系,则FY1、FY2为:⎪⎪⎩⎪⎪⎨⎧⋅-=⋅=⋅-+=⋅=cru bw cr a FY cf uaw cf a F r r Y )(2)(211βδβ (4) 将公式(2)、(3)、(4)以及公式β=v/u 带入(1),消去α1、α2,得二自由度汽车运动微分方程为:⎪⎪⎩⎪⎪⎨⎧+----=---+-=+δδr r r f r f r Z f r r f r aC w u C b C a v u bC aC w I C w ubC aC v u cr cf uw v m 22)( (5) 2 MATLAB 系统仿真本文采用MATLAB 对汽车的操纵稳定性进行仿真研究。
以1949 Buick 和Ferrari 轿车为例,进行对比分析。
汽车具体参数如表1所示。
通过仿真实验分析不同前轮转角和不同车速下横摆角速度和前轮转角对汽车操纵稳定性的影响,并粗略得出状态矩阵的特征根与车辆瞬时转向响应之间的关系。
表1 车辆相关参数2.1创建系统状态空间将牛顿力学运动方程携程状态空间形式为:⎩⎨⎧+=+=DUCX Y BU AX X(6) 将纵向速度v 与质心角速度wr 作为变量,前轮转角δ作为输入,输出质心角速度wr 。
则由公式(5)可得:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------+-=u C b C a ubC aC u u bC aC u crcf A r f r f r f 22,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=Zf f I aC m C B ,[]10=C ,0=D ,[]r w v X =,r w Y =,δ=u 。
2.2 不同车型相同前轮转角下的对比设置汽车初始速度U=40m/s ,在仿真时间开始时给前轮一个阶跃信号,使前轮转角为15°,并保持不变,传动比Ng=45。
此时角阶跃输入下的横摆角速度时域响应如图2所示,系统的Bode 图如3所示。
由图2可知,在同样的转向盘角输入下,法拉利跑车的瞬态响应比别克轿车的稍好一些,主要体现在较短的响应时间,较小的超调量以及更好的阻尼特性等。
由图3可知,对于频域响应在同一行驶车速下,法拉利跑车的响应带宽大于别克轿车的响应带宽,从而也说明了前者具有更好地频率响应特性,对于相频特性,法拉利跑车的系统响应之后要比别克车的少,系统延迟小。
图2 角阶跃输入下的横摆角速度时域响应图3 角阶跃输入下的横摆角速度频域响应3.3 不同车型相同侧向加速度下的对比稳态情况下前轮转角与侧向加速度的关系为:y R式中Rg U a C a C b L mg K y rf /),(2=-=,L 为前、后轮车轴中心的距离。
阶跃转向输入的侧向加速度增益为:LgKU Lg U a steadyy/1/22+=δ(8) 联立公式(7)、(8),在40m/s 车速下,为了获得0.3g 的稳态侧向加速度,Buick 和Ferrari 的车轮转角分别为0.61°和0.25°,相同侧向加速度的横摆角速度稳态响应曲线如图4所示。
图4 稳态侧向加速度输入下的横摆角速度时域响应由图4可知,在同样地稳态侧向加速度输入下,可以更清晰的看出法拉利跑车有着较短的响应时间,较小的超调量,以及更好的阻尼特性,其瞬态响应比别克轿车更好。
3.4 系统特征根分析动态系统的许多重要特性都是由系统的极点(特征根)在复平面上的位置决定的。
对于一个一阶系统σs+其脉冲响应为g tσ-t=(10)e)(1)(t如果σ>0,极点位于左(半)复平面,系统是稳定的;如果σ<0,极点位于右(半)复平面,系统是不稳定的;复数极点可以通过实部和虚部来描述。
设定汽车的车速为10~60m/s,每隔5m/s取一个数值。
得出不同车速系统轨迹图,如图5所示。
图5 不同车速系统轨迹图由图5可知,随着车速的增加,两种车型的特征根随车速变化而变化的趋势不同,法拉利有着相对较大的稳定裕度,因此其特征根位置与别克车比更远离虚轴。
附录:%1949 Buick 汽车参数mB=2045; % 质量IzB=5428; % 横摆转动惯量aB=1.488; %前轴到质心的距离bB=1.712; %后轴到质心的距离LB=3.2; % 轴距CfB=77850; %前轮侧偏刚度CrB=76510; %后轮侧偏刚度%Ferrari 汽车参数mF=1008; % 质量IzF=1031; % 横摆转动惯量aF=1.234; %前轴到质心的距离bF=1.022; %后轴到质心的距离LF=2.566; % 轴距CfF=117440; %前轮侧偏刚度CrF=144930; %后轮侧偏刚度U=40; %车速40km/hg=9.8; %重力加速度%总参数m=[2045 1008]; %质量(kg)Iz=[5428 1031]; %横摆转动惯量(kg*m^2)a=[1.488 1.234]; %前轴到质心距离(m)b=[1.712 1.022]; %后轴到质心距离(m)L=[3.200 2.256]; %轴距(m)Cf=[77850 117440]; %前轮侧偏刚度(N/rad)Cr=[76510 144930]; %后轮侧偏刚度(N/rad)A11=-(Cf+Cr)./(m*U);A12=-(a.*Cf-b.*Cr)./(m*U)-U;A21=-(a.*Cf-b.*Cr)./(Iz*U);A22=-(a.^2.*Cf+b.^2.*Cr)./(Iz*U);%1949 Buick状态矩阵AB=[-(CfB+CrB)/(mB*U),-(aB*CfB-bB.*CrB)/(mB*U)-U;-(aB*CfB-bB*CrB)/(Iz B*U),-(aB*aB*CfB+bB*bB*CrB)/(IzB*U)];BB=[CfB/mB;aB*CfB/IzB];CB=[0,1];DB=0;SYSB=ss(AB,BB,CB,DB);%Ferrari状态矩阵AF=[-(CfF+CrF)/(mF*U),-(aF*CfF-bF.*CrF)/(mF*U)-U;-(aF*CfF-bF*CrF)/(IzF*U),-(aF*aF*CfF+bF*bF*CrF)/(IzF*U)];BF=[CfF/mF;aF*CfF/IzF];CF=[0,1];DF=0;SYSF=ss(AF,BF,CF,DF);%生成输入向量t=0:0.01:5;delta(1)=0;Ng=45; %传动比45for k=2:length(t);delta(k)=15/Ng;end%求时域响应YB=lsim(SYSB,delta,t);YF=lsim(SYSF,delta,t);%画时域响应图并说明figure(1);plot(t,YB,'g--',t,YF,'b-');xlabel('Time(sec)'); %对X轴说明ylabel('Yaw rate(deg/s)'); %对Y轴说明title('Linear Simulation Results') %加标题text(2.3,5.1,'Ferrari'); %指定位置添加图形说明text(2.3,1.9,'1949 Buick');text(1.5,3.5,'Gear ratio=45,U=40 m/s');grid on; %开网格%bode 图figure(2);bode(SYSB,SYSF);legend('1949 Buick','Ferrari');title('Steer angle to yaw rate frequency response');grid on; %开网格%相同加速度下的时域响应曲线,ay=0.3*gg=9.8; %重力加速ay=0.3*g; %相同的侧向加速度U=40;Ng=45; %传动比45AB1=[-(CfB+CrB)/(mB*U),-(aB*CfB-bB*CrB)/(mB*U)-U;-(aB*CfB-bB*CrB)/(IzB*U),-(aB*aB*CfB+bB*bB*CrB)/(IzB*U)]; AF1=[-(CfF+CrF)/(mF*U),-(aF*CfF-bF*CrF)/(mF*U)-U;-(aF*CfF-bF*CrF)/(IzF*U),-(aF*aF*CfF+bF*bF*CrF)/(IzF*U)]; KB=mB*g/LB*(bB/CfB-aB/CrB); %1949 Buick转向系数KF=mF*g/LF*(bF/CfF-aF/CrF); %Ferrari转向系数DCB=(U*U/(LB*g))/(1+KB*U*U/(LB*g));DCF=(U*U/(LF*g))/(1+KF*U*U/(LF*g));% deltaB=ay*(LB*g+KB*U*U)/(U*U)*180/pi;% deltaF=ay*(LF*g+KF*U*U)/(U*U);deltaB=ay/DCB;deltaF=ay/DCF;t=0:0.01:5;deltaB(1)=0;deltaF(1)=0;SYSB1=ss(AB1,BB,CB,DB);SYSF1=ss(AF1,BF,CF,DF);for k=2:length(t);deltaB(k)=0.61*180/pi/Ng;endfor k=2:length(t);deltaF(k)=0.25*180/pi/Ng;endYB1=lsim(SYSB1,deltaB,t);YF1=lsim(SYSF1,deltaF,t);figure(3);plot(t,YB1,'b',t,YF1,'g');legend('1949 Buick','Ferrari');grid on;%随着车速增加系统特征根值变化u=10:5:60;for j=1:length(u);A=[A11(1)*U/u(j) (A12(1)+U)*U/u(j)-u(j);A21(1)*U/u(j) A22(1)*U/u(j)]; figure(4)plot(real(eig(A)),imag(eig(A)),'ro');hold on;endfor j=1:length(u);A=[A11(2)*U/u(j) (A12(2)+U)*U/u(j)-u(j);A21(2)*U/u(j) A22(2)*U/u(j)]; figure(4)plot(real(eig(A)),imag(eig(A)),'bx');hold on;endtitle('Root locus of the yaw rate')。