矩阵的逆的典型例题
ML32006
2矩阵典型习题解析
2 矩阵 矩阵是学好线性代数这门课程的基础,而对于初学者来讲,对于矩阵的理解是尤为的重要;许多学生在最初的学习过程中感觉矩阵很难,这也是因为对矩阵所表示的内涵模糊的缘故。其实当我们把矩阵与我们的实际生产经济活动相联系的时候,我们才会发现,原来用矩阵来表示这些“繁琐”的事物来是多么的奇妙!于是当我们对矩阵产生无比的兴奋时,那么一切问题都会变得那么的简单! 知识要点解析 2.1.1 矩阵的概念 1.矩阵的定义 由m×n 个数),,2,1;,,2,1(n j m i a ij ==组成的m 行n 列的矩形数表 ?? ?? ? ? ? ??=mn m m n n a a a a a a a a a A 2 1 22221 11211 称为m×n 矩阵,记为n m ij a A ?=)( 2.特殊矩阵 (1)方阵:行数与列数相等的矩阵; } (2)上(下)三角阵:主对角线以下(上)的元素全为零的方阵称为上(下) 三角阵; (3)对角阵:主对角线以外的元素全为零的方阵; (4)数量矩阵:主对角线上元素相同的对角阵; (5)单位矩阵:主对角线上元素全是1的对角阵,记为E ; (6)零矩阵:元素全为零的矩阵。 3.矩阵的相等 设mn ij mn ij b B a A )(; )(== 若 ),,2,1;,,2,1(n j m i b a ij ij ===,则称A 与B 相等,记为A=B 。
2.1.2 矩阵的运算 1.加法 ~ (1)定义:设mn ij mn ij b B A A )(,)(==,则mn ij ij b a B A C )(+=+= (2)运算规律 ① A+B=B+A ; ②(A+B )+C =A +(B+C ) ③ A+O=A ④ A +(-A )=0, –A 是A 的负矩阵 2.数与矩阵的乘法 (1)定义:设,)(mn ij a A =k 为常数,则mn ij ka kA )(= (2)运算规律 ① K (A+B ) =KA+KB , ② (K+L )A =KA+LA , ③ (KL ) A = K (LA ) 3.矩阵的乘法 (1)定义:设.)(,)(np ij mn ij b B a A ==则 ,)(mp ij C C AB ==其中∑== n k kj ik ij b a C 1 . (2)运算规律 ①)()(BC A C AB =;②AC AB C B A +=+)( ③CA BA A C B +=+)( (3)方阵的幂 ①定义:A n ij a )(=,则K k A A A = ②运算规律:n m n m A A A +=?;mn n m A A =)( (4)矩阵乘法与幂运算与数的运算不同之处。 ①BA AB ≠ ②;00,0===B A AB 或不能推出 ③k k k B A AB ?≠)( 4.矩阵的转置 ~ (1)定义:设矩阵A =mn ij a )(,将A 的行与列的元素位置交换,称为矩阵A 的转置,记为nm a A ji T )(=, (2)运算规律 ①;)(A A T T = ②T T T B A B A +=+)(;
《理论力学》动力学典型习题+答案
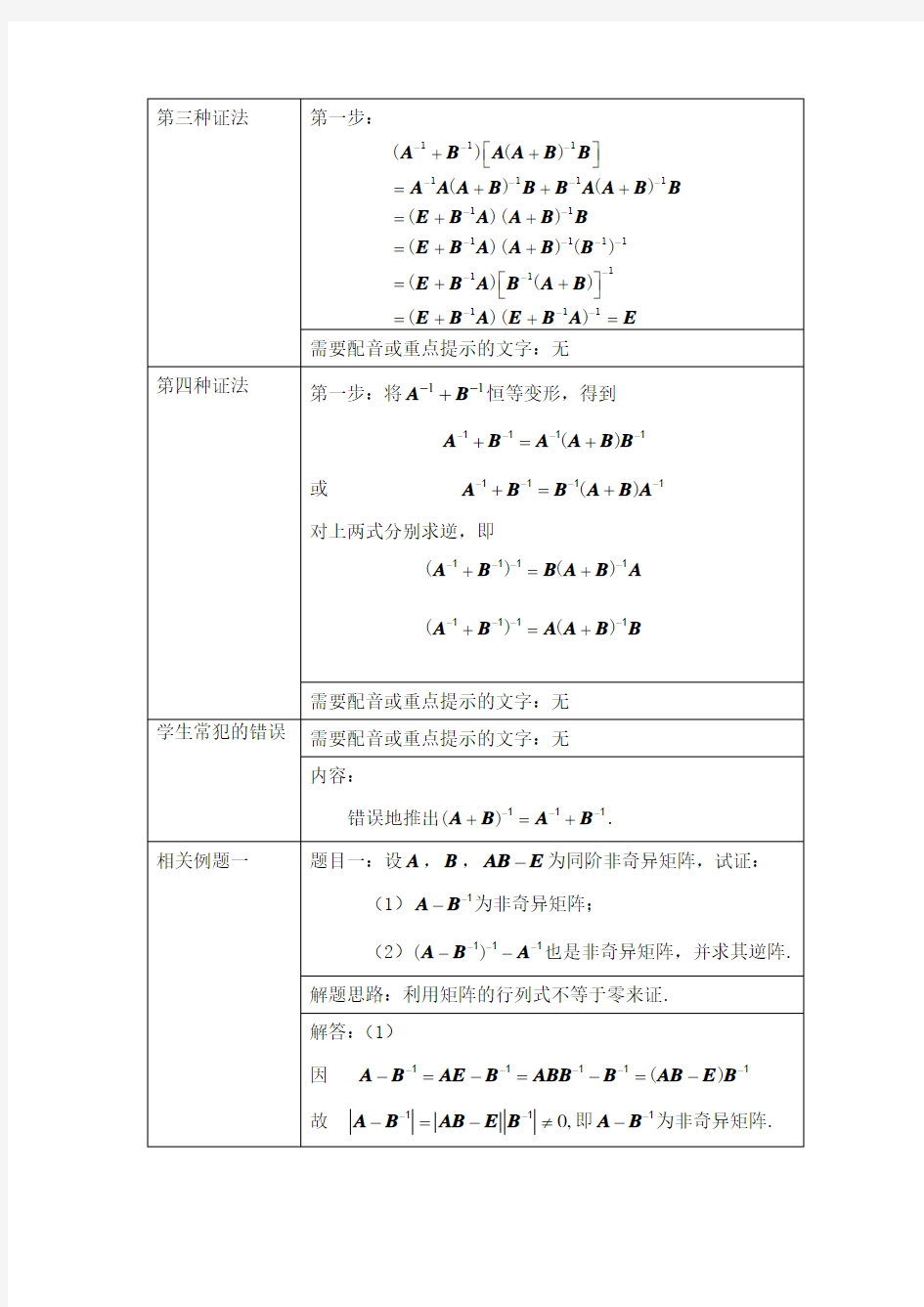
《动力学I 》第一章 运动学部分习题参考解答 1-3 解: 运动方程:θtan l y =,其中kt =θ。 将运动方程对时间求导并将0 30=θ代入得 34cos cos 22lk lk l y v ====θ θθ 938cos sin 22 3 2lk lk y a =-==θ θ 1-6 证明:质点做曲线运动,所以n t a a a +=, 设质点的速度为v ,由图可知: a a v v y n cos ==θ,所以: y v v a a n = 将c v y =,ρ 2 n v a = 代入上式可得 ρ c v a 3 = 证毕 1-7 证明:因为n 2 a v =ρ,v a a v a ?==θsin n 所以:v a ?= 3 v ρ 证毕 1-10 解:设初始时,绳索AB 的长度为L ,时刻t 时的长度 为s ,则有关系式: t v L s 0-=,并且 222x l s += 将上面两式对时间求导得: 0v s -= ,x x s s 22= 由此解得:x sv x -= (a ) (a)式可写成:s v x x 0-= ,将该式对时间求导得: 2 02 v v s x x x =-=+ (b) 将(a)式代入(b)式可得:32 20220x l v x x v x a x -=-== (负号说明滑块A 的加速度向上) 1-11 解:设B 点是绳子AB 与圆盘的切点,由于绳子相对圆盘无滑动,所以R v B ω=,由于绳子始终处 于拉直状态,因此绳子上A 、B 两点的速度在 A 、B 两点连线上的投影相等,即: θcos A B v v = (a ) 因为 x R x 2 2cos -= θ (b ) 将上式代入(a )式得到A 点速度的大小为: 2 2 R x x R v A -=ω (c ) 由于x v A -=,(c )式可写成:Rx R x x ω=--22 ,将该式两边平方可得: 222222)(x R R x x ω=- 将上式两边对时间求导可得: x x R x x R x x x 2232222)(2ω=-- 将上式消去x 2后,可求得:2 22 42) (R x x R x --=ω 由上式可知滑块A 的加速度方向向左,其大小为 2 22 42) (R x x R a A -=ω 1-13 解:动点:套筒A ; 动系:OA 杆; 定系:机座; 运动分析: 绝对运动:直线运动; 相对运动:直线运动; 牵连运动:定轴转动。 根据速度合成定理 r e a v v v += 有:e a cos v v =?,因为AB 杆平动,所以v v =a , o v o v a v e v r v x o v x o t
矩阵理论第一二章典型例题
《矩阵理论》第一二章 典型例题 一、 判断题 1.A n 为阶实对称矩阵,n R x 对中的列向量, ||x |A x =定义, ||x||x 则为向量 的范数. ( ) 提示:因为非负性不成立,故结论错误。 2.设A n 为阶Hermite 矩阵, 12,,,n λλλ是矩阵A 的特征值,则2 2 21 ||||n m i i A λ==∑. ( ) 提示:A n 为阶Hermite 矩阵?22 2 212||||||(,, ,)||H m n m A Udiag U λλλ= 2 212||(,, ,)||n m diag λλλ=21 n i i λ==∑. 3. 如果m n A C ?∈,且0A ≠,()H AA AA --=, 则2||||AA n -=. ( ) 提示:AA -为幂等矩阵?AA - 的特征值为0或1。又0A ≠,?A AA - ≥秩()=秩()1? 0AA -≠?1是AA -的特征值 ?2||||AA -=max ()i AA λ-= =1 4. 若设n x R ∈ ,则212||||||||||x x x ≤≤. ( ) 提示: 2 2 2 2 2 2 1221 ||||||||||||||x x x x x =++ +≤, 11||||||n i i x x ==∑1 ||1n i i x ==?∑ 21/21 ||)n i i x =≤ ∑2||x = 5. 设m n A R ?∈的奇异值为12n σσσ≥≥ ≥,则2 22 1 ||||n i i A σ==∑. ( ) 6. 设n n A C ?∈,且有某种算子范数||||?,使得||||1A <,则11 ||()||1|||| E A A --> -, 其中E 为n 阶单位矩阵. ( ) 提示:
矩阵典型习题解析
2 矩阵 矩阵是学好线性代数这门课程的基础,而对于初学者来讲,对于矩阵的理解是尤为的重要;许多学生在最初的学习过程中感觉矩阵很难,这也是因为对矩阵所表示的内涵模糊的缘故。其实当我们把矩阵与我们的实际生产经济活动相联系的时候,我们才会发现,原来用矩阵来表示这些“繁琐”的事物来是多么的奇妙!于是当我们对矩阵产生无比的兴奋时,那么一切问题都会变得那么的简单! 2.1 知识要点解析 2.1.1 矩阵的概念 1.矩阵的定义 由m×n 个数),,2,1;,,2,1(n j m i a ij 组成的m 行n 列的矩形数表 mn m m n n a a a a a a a a a A 21 22221 11211 称为m×n 矩阵,记为n m ij a A )( 2.特殊矩阵 (1)方阵:行数与列数相等的矩阵; (2)上(下)三角阵:主对角线以下(上)的元素全为零的方阵称为上(下) 三角阵; (3)对角阵:主对角线以外的元素全为零的方阵; (4)数量矩阵:主对角线上元素相同的对角阵; (5)单位矩阵:主对角线上元素全是1的对角阵,记为E ; (6)零矩阵:元素全为零的矩阵。 3.矩阵的相等 设mn ij mn ij b B a A )(; )( 若 ),,2,1;,,2,1(n j m i b a ij ij ,则称A 与B 相等,记为A=B 。 2.1.2 矩阵的运算
1.加法 (1)定义:设mn ij mn ij b B A A )(,)( ,则mn ij ij b a B A C )( (2)运算规律 ① A+B=B+A ; ②(A+B )+C =A +(B+C ) ③ A+O=A ④ A +(-A )=0, –A 是A 的负矩阵 2.数与矩阵的乘法 (1)定义:设,)(mn ij a A k 为常数,则mn ij ka kA )( (2)运算规律 ① K (A+B ) =KA+KB , ② (K+L )A =KA+LA , ③ (KL ) A = K (LA ) 3.矩阵的乘法 (1)定义:设.)(,)(np ij mn ij b B a A 则 ,)(mp ij C C AB 其中 n k kj ik ij b a C 1 (2)运算规律 ①)()(BC A C AB ;②AC AB C B A )( ③CA BA A C B )( (3)方阵的幂 ①定义:A n ij a )( ,则K k A A A ②运算规律:n m n m A A A ;mn n m A A )( (4)矩阵乘法与幂运算与数的运算不同之处。 ①BA AB ②;00,0 B A AB 或不能推出 ③k k k B A AB )( 4.矩阵的转置 (1)定义:设矩阵A =mn ij a )(,将A 的行与列的元素位置交换,称为矩阵A 的转置,记为nm a A ji T )( , (2)运算规律 ①;)(A A T T ②T T T B A B A )(; ③;)(T T KA kA ④T T T A B AB )(。
一般矩阵可逆的判定电子教案
一般矩阵可逆的判定
一般矩阵可逆的判定 Good (11统计数学与统计学院 1111060231) 摘要:作为一张表,矩阵的运算规则具有特殊性。在运算的过程中,逆矩阵则是作为矩阵乘法的逆运算而存在的。由于矩阵乘法的逆运算仅限于方阵,故而逆矩阵又作为一项特殊的矩阵除法运算而存在。对于矩阵的运算来说,逆矩阵是不可缺少的一部分。在以线性代数为基础的研究中,逆矩阵是解决实际问题的一个最直观,最实用的工具。然而在实际研究中,并不是所有方阵都存在逆矩阵,那么对于矩阵可逆的判定就显得极其重要了。 关键字:阶方阵;;;; 0 引言 逆矩阵是矩阵乘法逆运算的结果。这个逆运算的过程被作为矩阵运算的一部分而不可或缺。对于所有矩阵而言,只有方阵中可逆的那部分才存在逆矩阵;就好像四边形一样,只有当矩形的四边相等才能被叫做正方形。然而也就是这很特殊的一小部分,它的运用却充斥着所有与线性代数相关的领域。比如:物理学,经济学,统计学,数学,社会管理学等等。对于矩阵的运算来说,逆矩阵的运算至关重要。由于矩阵在实际运用中具有的重要作用,而逆矩阵对于矩阵来说又具有重要的作用。在以矩阵为研究对象的研究过程中,研究逆矩阵也就有了很重要的意义。 对于研究逆矩阵的过程中,“什么样的矩阵才可逆?”是值得深讨的问题。就像求四边形中的正方形一样,要求正方形,最基本的前提就是:四边形必须是矩形。只有四边形满足四个内角都是90度的时候,四边形才称的上是矩形。而对于矩形来说,只有满足矩形的四条边都相等时,这样的矩形才能被称为正方形。对于矩阵可逆来说,一个矩阵要可逆,最基本的前提:必须满足矩阵的行列相等,矩阵必须是一个方阵才行。研究方阵的可逆,对于实际
初中物理力学经典例题难题
1..如图22所示装置,杠杆OB 可绕O 点在竖直平面内转动,OA ∶AB =1∶2。当在杠杆A 点挂一质量为300kg 的物体甲时,小明通过细绳对动滑轮施加竖直向下的拉力为F 1,杠杆B 端受到竖直向上的拉力为T 1时,杠杆在水平位置平衡,小明对地面的压力为N 1;在物体甲下方加挂质量为60kg 的物体乙时,小明通过细绳对动滑轮施加竖直向下的拉力为F 2,杠杆B 点受到竖直向上的拉力为T 2时,杠杆在水平位置平衡,小明对地面的压力为N 2。已知N 1∶N 2=3∶1,小明受到的重力为600N ,杠杆OB 及细绳的质量均忽略不计,滑轮轴间摩擦忽略不计,g 取10N/kg 。求: (1)拉力T 1; (2)动滑轮的重力G 。 39.解: (1)对杠杆进行受力分析如图1甲、乙所示: 根据杠杆平衡条件: G 甲×OA =T 1×OB (G 甲+G 乙)×OA =T 2×OB 又知OA ∶AB = 1∶2 所以OA ∶OB = 1∶3 N 300010N/kg kg 300=?==g m G 甲甲 N 600N/kg 10kg 60=?==g m G 乙乙 N 0001N 0300311=?==甲G OB OA T N 2001N 03603 1)(2=?= += 乙甲G G OB OA T (1分) (2)以动滑轮为研究对象,受力分析如图2甲、乙所示 因动滑轮处于静止状态,所以: T 动1=G +2F 1,T 动2=G +2F 2 又T 动1=T 1,T 动2=T 2 所以: G G G T F 21N 5002N 1000211-=-=-= (1分) G G G T F 2 1N 6002 N 12002 22- =-= -= (1分) 以人为研究对象,受力分析如图3甲、乙所示。 人始终处于静止状态,所以有: F 人1+ N 1, = G 人, F 人2+N 2, =G 人 因为F 人1=F 1,F 人2=F 2,N 1=N 1, ,N 2=N 2, 且G 人=600N 所以: 图22 甲 乙 图1 T B T 动2 F 2 动1 F 1 人 人1 人2 人 图3 甲 乙
线性代数典型例题
线性代数 第一章 行列式 典型例题 一、利用行列式性质计算行列式 二、按行(列)展开公式求代数余子式 已知行列式412343 344 615671 12 2 D = =-,试求4142A A +与4344A A +. 三、利用多项式分解因式计算行列式 1.计算221 1231223131 5 1319x D x -= -. 2.设()x b c d b x c d f x b c x d b c d x = ,则方程()0f x =有根_______.x = 四、抽象行列式的计算或证明 1.设四阶矩阵234234[2,3,4,],[,2,3,4]A B αγγγβγγγ==,其中234,,,,αβγγγ均为四维列向量,且已知行列式||2,||3A B ==-,试计算行列式||.A B + 2.设A 为三阶方阵,*A 为A 的伴随矩阵,且1 ||2 A = ,试计算行列式1*(3)22.A A O O A -??-??? ?
3.设A 是n 阶(2)n ≥非零实矩阵,元素ij a 与其代数余子式ij A 相等,求行列式||.A 4.设矩阵210120001A ?? ??=?? ????,矩阵B 满足**2ABA BA E =+,则||_____.B = 5.设123,,ααα均为3维列向量,记矩阵 123123123123(,,),(,24,39)A B αααααααααααα==+++++ 如果||1A =,那么||_____.B = 五、n 阶行列式的计算 六、利用特征值计算行列式 1.若四阶矩阵A 与B 相似,矩阵A 的特征值为 1111 ,,,2345 ,则行列式1||________.B E --= 2.设A 为四阶矩阵,且满足|2|0E A +=,又已知A 的三个特征值分别为1,1,2-,试计算行列式*|23|.A E + 第二章 矩阵 典型例题 一、求逆矩阵 1.设,,A B A B +都是可逆矩阵,求:111().A B ---+
一般矩阵可逆的判定
一般矩阵可逆的判定 Good (11统计数学与统计学院 1111060231) 摘要:作为一张表,矩阵的运算规则具有特殊性。在运算的过程中,逆矩阵则是作为矩阵乘法的逆运算而存在的。由于矩阵乘法的逆运算仅限于方阵,故而逆矩阵又作为一项特殊的矩阵除法运算而存在。对于矩阵的运算来说,逆矩阵是不可缺少的一部分。在以线性代数为基础的研究中,逆矩阵是解决实际问题的一个最直观,最实用的工具。然而在实际研究中,并不是所有方阵都存在逆矩阵,那么对于矩阵可逆的判定就显得极其重要了。 关键字:n阶方阵A;A≠0;r A=n;?λn≠0;AB=BA=I n 0 引言 逆矩阵是矩阵乘法逆运算的结果。这个逆运算的过程被作为矩阵运算的一部分而不可或缺。对于所有矩阵而言,只有方阵中可逆的那部分才存在逆矩阵;就好像四边形一样,只有当矩形的四边相等才能被叫做正方形。然而也就是这很特殊的一小部分,它的运用却充斥着所有与线性代数相关的领域。比如:物理学,经济学,统计学,数学,社会管理学等等。对于矩阵的运算来说,逆矩阵的运算至关重要。由于矩阵在实际运用中具有的重要作用,而逆矩阵对于矩阵来说又具有重要的作用。在以矩阵为研究对象的研究过程中,研究逆矩阵也就有了很重要的意义。 对于研究逆矩阵的过程中,“什么样的矩阵才可逆?”是值得深讨的问题。就像求四边形中的正方形一样,要求正方形,最基本的前提就是:四边形必须是矩形。只有四边形满足四个内角都是90度的时候,四边形才称的上是矩形。而对于矩形来说,只有满足矩形的四条边都相等时,这样的矩形才能被称为正方形。对于矩阵可逆来说,一个矩阵要可逆,最基本的前提:必须满足矩阵的行列相等,矩阵必须是一个方阵才行。研究方阵的可逆,对于实际应用才存在实际意义。那么对于方阵来说,又需要满足什么样的条件,方阵才可逆呢?本文也就是从可逆矩阵的判定条件入手,着重分析可逆判定的充要条件。最后介绍几种常用的求解逆矩阵的方法。 1 矩阵的概念 1.0矩阵的定义 定义1:令F是一个数域,用F上的m×n个数a ij(i=1,2,?,m;j=1,2,?,n)排成m行n列的矩阵列,则称为m×n阵,也称为一个F上的矩阵,简记为A mn。 A=a11a12 a21a22 ?a1n ?a2n ?? a m1a m2 ?? ?a mn 1.1逆矩阵的定义 定义2:设A是数域F上的n阶方阵,若数域F上同时存在一个n阶方阵B,使得 AB=BA=I n 则称B是A的逆矩阵,记作:B=A?1。
5-3 正定二次型与正定矩阵习题评讲
5-3 正定二次型与正定矩阵习题评讲 12、如果A、B为同阶正定矩阵,证明:A+B为正定矩阵。 证明1:因为A、B是n阶实对称矩阵,故A+B也是n阶实对称矩阵。 因为A、B为n阶正定矩阵,所以实二次型f(x1,x2,…,xn)=XT A X和g(x1,x2,…,xn)=XT BX都是正定二次型。实二次型h(x1,x 2,…,xn)=XT(A+B)X=XTAX+XT BX=f(x1,x2,…,xn)+g(x1,x2,…,xn)。所以对任意不全为零的实数C1,C2,…,Cn,因为f(C1,C2,…,Cn)>0,g(C1,C2,…,Cn)>0,从而有 h(C1,C2,…,Cn)=f(C1,C2,…,Cn)+g(C1,C2,…,Cn) >0,所以实二次型h(x1,x2,…,xn)=XT (A+B)X正定,从而A+B是正定矩阵。 证明2:因为A、B是n阶实对称矩阵,故A+B也是n阶实对称矩阵。 因为A、B为n阶正定矩阵,所以对任意n维非零实列向量X0,都有 X0TAX0>0;X0T BX0>0; X0T(A+B)X0= X0TAX0+X0T BX0>0, 所以A+B是正定矩阵。 P263 总自测题 证明题 (2)设n维列向量α与任何n维向量都正交,证明:α=0。 证明:设α=(a1,a2,…,an),取n维单位向量εj=(0,…,0,1,0,…, 0),j=1,2,…,n。有(α,εj)=aj,j=1,2,…,n,所以α=0。 8、判别下列实对称矩阵是否为正定矩阵: (1)??????????111121111;(2)??????????------211121112; (3)??????? ??????? ? ?---- 52 1212112 1 1。 解(1):A=???? ? ?????111121111是实对称矩阵,第三个顺序主子式Δ3=A =0,A不是正定矩阵。
可逆矩阵判定典型例题
典型例题(二)方阵可逆的判定 例1 设A 是n 阶方阵, 试证下列各式: (1)若0||≠A , 则 T T A A )()(11--=; (2)若A 、B 都是n 阶可逆矩阵, 则* **)(A B AB =; (3) T T A A )()(**=; (4)若0||≠A , 则* 11*)()(--=A A ; (5) * 1*)1()(A A n --=-; (6)若0||≠A , 则l l A A )()(11--=(l 为自然数); (7) * 1*)(A k kA n -=. 证 (1)因为0||≠A , 故A 是可逆矩阵, 且 E AA =-1 两边同时取转置可得 E E A A AA T T T T ===--)()()(11 故由可逆矩阵的定义可知 T A )(1-是A T 的逆矩阵. 即 1 1)()(--=T T A A (2)利用方阵与其对应的伴随矩阵的关系有 E AB AB AB ||)()(*= (2-7) 另一方面 B I A B B A A B AB A B )|(|)())((*****== E AB E B A B B A |||| ||||*=== (2-8) 比较式(2-7)、(2-8)可知 ))(()()(***AB A B AB AB = 又因为A 、B 均可逆, 所以(AB )也可逆, 对上式两端右乘1 )(-AB 可得 ***)(A B AB = (3)设n 阶方阵A 为 ?????????? ????=nn n n n n a a a a a a a a a A 2 1 2222111211 于是可得A 的伴随矩阵* A 为
高中物理力学典型例题
高中物理力学典型例题 1、如图1-1所示,长为5米的细绳的两端分别系于竖立在地面上相距 为4米的两杆顶端A、B。绳上挂一个光滑的轻质挂钩。它钩着一个重 为12牛的物体。平衡时,绳中张力T=____ 分析与解:本题为三力平衡问题。其基本思路为:选对象、分析力、画 力图、列方程。对平衡问题,根据题目所给条件,往往可采用不同的方 法,如正交分解法、相似三角形等。所以,本题有多种解法。 解法一:选挂钩为研究对象,其受力如图1-2所示,设细绳与水平夹角 为α,由平衡条件可知:2TSinα=F,其中F=12牛,将绳延长,由图 中几何条件得:Sinα=3/5,则代入上式可得T=10牛。 解法二:挂钩受三个力,由平衡条件可知:两个拉力(大小相等均为T) 的合力F’与F大小相等方向相反。以两个拉力为邻边所作的平行四边形 为菱形。如图1-2所示,其中力的三角形△OEG与△ADC相似,则: 得:牛。 想一想:若将右端绳A 沿杆适当下移些,细绳上张力是否变化? (提示:挂钩在细绳上移到一个新位置,挂钩两边细绳与水平方向夹角仍相等,细绳的张力仍不变。) 2、如图2-1所示,轻质长绳水平地跨在相距为2L的两个小定滑轮A、 B上,质量为m的物块悬挂在绳上O点,O与A、B两滑轮的距离相 等。在轻绳两端C、D分别施加竖直向下的恒力F=mg。先托住物块, 使绳处于水平拉直状态,由静止释放物块,在物块下落过程中,保持 C、D两端的拉力F不变。 (1)当物块下落距离h为多大时,物块的加速度为零? (2)在物块下落上述距离的过程中,克服C端恒力F做功W为多少? (3)求物块下落过程中的最大速度Vm和最大距离H? 分析与解:物块向下先作加速运动,随着物块的下落,两绳间的夹角 逐渐减小。因为绳子对物块的拉力大小不变,恒等于F,所以随着两 绳间的夹角减小,两绳对物块拉力的合力将逐渐增大,物块所受合力 逐渐减小,向下加速度逐渐减小。当物块的合外力为零时,速度达到 最大值。之后,因为两绳间夹角继续减小,物块所受合外力竖直向上, 且逐渐增大,物块将作加速度逐渐增大的减速运动。当物块下降速度 减为零时,物块竖直下落的距离达到最大值H。 当物块的加速度为零时,由共点力平衡条件可求出相应的θ角,再由θ角求出相应的距离h,进而求出克服C端恒力F所做的功。 对物块运用动能定理可求出物块下落过程中的最大速度Vm和最大距离H。 (1)当物块所受的合外力为零时,加速度为零,此时物块下降距离为h。因为F恒等于mg,所以绳对物块拉力大小恒为mg,由平衡条件知:2θ=120°,所以θ=60°,由图2-2知: h=L*tg30°= L [1] (2)当物块下落h时,绳的C、D端均上升h’,由几何关系可得:h’=-L [2] 克服C端恒力F做的功为:W=F*h’[3]
矩阵可逆的一个充分必要条件的几种讲法
矩阵可逆的一个充分必要条件的几种讲法 不论是在线性代数的教学中还是高等代数的教学中,矩阵的相关内容都是十分重要的。而其中矩阵可逆的部分又是要重点讲授的,因为逆矩阵在讨论研究矩阵问题时有重要作用。在矩阵可逆的这部分内容中,矩阵可逆及逆矩阵的定义是必然要介绍的,而矩阵可逆的条件中有一个充分必要条件即一个方阵可逆的充分必要条件是它的行列式不等于零是一定会讲授的,也是应用较多的,因此要求同学们一定理解掌握。 而就这一个充分必要条件不同的教师有不同的讲法,本文根据自己的体会,介绍了这一个充分必要条件的三种讲法并进行了一定的对比分析。 第一种讲法是非常常见的,很多教师都采用,特别是刚开始 教线性代数的新教师。我在第一次教这部分时也用的是这种讲法。首先介绍了矩阵可逆的定义[1],即设A为n阶方阵,如果存在n阶方阵B,使得AB=BA=E(E是n阶单位矩阵),则称方阵A是可逆的,而B称为A的逆矩阵。在同学们知道理解了矩阵可逆及逆矩阵概念后,就引入介绍矩阵可逆的条件,我们主要介绍矩阵可逆的一个常用的充分必要条件。而为了介绍这个充分必要条件,首先需要介绍一个相关的内容,那就是伴随矩阵的相关概念[2] 。对于伴随矩阵首先介绍伴随矩阵的定义: 设矩阵A,则称矩阵为A的伴随矩阵,其中Aij是矩阵A中元素
aij 的代数余子式。 接着介绍伴随矩阵的一个重要性质:同时给出其证明:事实 上,由代数余子式的性质同理可得,所以。 这样准备工作已做好,就来讲最重要的矩阵可逆的充分必要条件。 定理(矩阵可逆的充分必要条件)矩阵 A 可逆的充分必要条 件是,且。 证明:(必要性)若,且,则,故 A 可逆且。 (充分性)若 A 可逆,,那么,因此。 以上是第一种讲法的基本过程,当然这其中还有很多教师的引导讲解,这里未体现。但这种讲法的讲授思路和顺序基本按照教材中给出的顺序来讲,其实就是直接教授给学生们概念和结论,让学生们去理解应用,缺乏探究这些结论的过程。而第二种讲法恰恰是由矩阵可逆的定义出发按照正常的推理过程得到了矩阵可逆的充分必要条件。 第二种讲法首先仍是介绍矩阵可逆的定义,接着就探究矩阵可逆的充分必要条件。探究过程如下: 由矩阵可逆的定义,要想方阵 A 可逆,首先得找出同阶方阵B,使得AB=E再看BA是否也等于E。那么我们假设A=, B=, 那么由矩阵乘法,AB的第i行第j列(i , j=1 , 2,…,n)元素应该是(1) 此时引导学生从已有知识中寻找与该问题类似或相关的内容来
矩阵理论
矩阵理论 通过学习矩阵理论这门课,发现在这个大数据的时代,矩阵理论是这个时代的基础学科,也是计算机飞速发展的引擎,它的重要性令我咂舌。一下内容是我对矩阵理论这门课程的总结和描述。 本门课程主要包含以下几部分内容:线性方程组、线性空间与线性变换、内积空间、特殊变换及其矩阵、范数及其应用、矩阵分析及其应用、特征值问题。 一 线性方程组 对*m n 矩阵A 施行一次初等行变换(初等行变换),相当于在A 的左边(右边)乘以相应的m 阶(n 阶)初等矩阵。 由于现代计算机处理的数据越来越多,运行的任务越来越大,因此,对矩阵的处理复杂度就是我们关注的重点。 对行列式的拉普拉斯变换是将一个n 阶行列式的计算转化为n 个1n -阶行列式的计算,但是它的计算时间是!n 级。所以拉普拉斯展开定理在理论上非常重要,但在计算上一般仅用于低阶或特殊的行列式。 判断一个算法的优劣,有很多标准,包括时间复杂度和空间复杂度,显然,时间复杂度越小,说明算法效率越高,因此算法也越有价值;而空间复杂度越小,说明算法越好。但主要考虑时间复杂度,因为人生苦短嘛哈哈。 对于一些常用的()f n ,成立下列重要关系: 23(1)(log )()(log )()() (2)(3)(!)()n n n O O n O n O n n O n O n O O O n O n <<<<<<<<< LU 分解就是致力于对降低对方程组求解的复杂度。LU 分解就是在可以的情况下,将矩阵A 分解成单位下三角矩阵和一个上三角的乘积。这样的话,对Ax b =求解,可以转化为对Ly b =求解,然后对Ux y =求解。但是,不是每一个矩阵都可以这样分解,是要满足一定的要求的,这个要求就是矩阵A 的顺序主子式均不为零。 但是不满足这个条件的矩阵就不能分解了吗?当然不是啦!加入一个方阵A 不是顺序主子式不全为零的时候,但是通过行变换,可以满足要求,这样就得了下面这个定理。 如果存在置换矩阵P 、单位下三角矩阵L 与上三角矩阵U ,使得方阵A 满足P A L U =,称作带置换的LU 分解。
正定矩阵的性质及应用
正定矩阵的性质及应用 摘要:正定矩阵是线性代数中一个极其重要的应用广泛的概念,深入探讨其基本性质对于其他科研领域的研究有着重要的意义。基于此,本文首先对正定矩阵的定义进行了描述,其次研究了正定矩阵的性质与判定方法,最后简单介绍了其具体应用。 关键词:正定矩阵;基本性质;推论;判定;应用 前言:矩阵是线性代数中一个极其重要的应用广泛的概念,如线性方程组的一些重要性质反映在它的系数矩阵和增广矩阵的性质上,并且解方程组的过程也表现为变换这些矩阵的过程,二次型的正定性与它的矩阵的正定性相对应,甚至有些性质完全不同的表面上完全没有联系的问题,归结成矩阵问题后却是相同的。这就使矩阵成为代数特别是线性代数的一个主要研究对象。作为矩阵的一种特殊类型,正定矩阵有很多特殊性质,是研究二次型,线性空间和线性变换问题的有利工具。本文就此浅谈一下正定矩阵的各种性质和应用。 1.正定矩阵的基本性质 1.1 正定矩阵的定义 设M是n阶实系数对称矩阵,如果对任何非零向量X=(x1,……,xn) 都有X′MX>0,就称M正定(Positive Definite)。正定矩阵在相合变换下可化为标准型,即单位矩阵。所有特征值大于零的对称矩阵(或厄米矩阵)也是正定矩阵。 另一种定义:一种实对称矩阵,正定二次型f(x1,x2,…,xn)=X′AX的矩阵A(A′)称为正定矩阵。 1.2 正定矩阵的性质 当矩阵A为正定矩阵的时候,则必有以下几个性质,即: (1)aii>0,i=1,2,……,n; (2)A的元素的绝对值最大者,必定为主对角元; (3)≤annAn-1 ,其中,An-1是A的n-1阶主子式; (4)≤a11a22……ann,当且仅当A为对角阵的时候成立; 而除了以上这几个性质外,还有若干个推论也是比较重要的,在很多应用中
矩阵的运算及其运算规则
矩阵基本运算及应用 201700060牛晨晖 在数学中,矩阵是一个按照长方阵列排列的复数或实数集合。矩阵是高等代数学中的常见工具,也常见于统计分析等应用数学学科中。在物理学中,矩阵于电路学、力学、光学和量子物理中都有应用;计算机科学中,三维动画制作也需要用到矩阵。矩阵的运算是数值分析领域的重要问题。将矩阵分解为简单矩阵的组合可以在理论和实际应用上简化矩阵的运算。在电力系统方面,矩阵知识已有广泛深入的应用,本文将在介绍矩阵基本运算和运算规则的基础上,简要介绍其在电力系统新能源领域建模方面的应用情况,并展望随机矩阵理论等相关知识与人工智能电力系统的紧密结合。 1矩阵的运算及其运算规则 1.1矩阵的加法与减法 1.1.1运算规则 设矩阵,, 则
简言之,两个矩阵相加减,即它们相同位置的元素相加减! 注意:只有对于两个行数、列数分别相等的矩阵(即同型矩阵),加减法运算才有意义,即加减运算是可行的. 1.1.2运算性质 满足交换律和结合律 交换律; 结合律. 1.2矩阵与数的乘法 1.2.1运算规则 数乘矩阵A,就是将数乘矩阵A中的每一个元素,记为或. 特别地,称称为的负矩阵. 1.2.2运算性质 满足结合律和分配律 结合律:(λμ)A=λ(μA);(λ+μ)A =λA+μA. 分配律:λ(A+B)=λA+λB.
已知两个矩阵 满足矩阵方程,求未知矩阵. 解由已知条件知 1.3矩阵与矩阵的乘法 1.3.1运算规则 设,,则A与B的乘积是这样一个矩阵: (1) 行数与(左矩阵)A相同,列数与(右矩阵)B相同,即 . (2) C的第行第列的元素由A的第行元素与B的第列元素对应相乘,再取乘积之和.
小度写范文【可逆矩阵判定典型例题】 矩阵可逆模板
【可逆矩阵判定典型例题】矩阵可逆典型例题(二)方阵可逆的判定 例1 设A是n阶方阵, 试证下列各式: (1)若|A|≠0, 则(AT)-1=(A-1)T ; (2)若A、B都是n阶可逆矩阵, 则 (AB)*=B*A* ;(3) (AT)*=(A*)T;(4)若|A|≠0, 则(A*)-1=(A-1)* ;(5) (-A)*=(-1)n-1A*;(6)若|A|≠0, 则(Al)-1=(A-1)l (l为自然数);(7) (kA)*=kn-1A*. 证(1)因为|A|≠0,故A是可逆矩阵, 且 AA-1 =E两边同时取转置可得 (AA-1)T=(A-1)TAT=(E)T=E 故由可逆矩阵的定义可知 (A-1)T是AT的逆矩阵. 即 (A-1)T=(AT)-1 (2)利用方阵与其对应的伴随矩阵的关系有 (AB)*(AB)=|AB|E 另一方面
(B*A*)(AB)=B*(A*A)B=B*(|A|I)B =|A|B*B=|A| |B|E=|AB|E 比较式(2-7)、(2-8)可知 (AB)*(AB)=(B*A*)(AB) 又因为A、B均可逆, 所以(AB)也可逆, 对上式两端右乘(AB)-1 可得 (AB)*=B*A* (3)设 n 阶方阵A为 ?aa12 a?11 1n?A=?a??21a22 a2n?? ? ??aa? ?n1n2 ann? 于是可得A的伴随矩阵A* 为 ?AA?11 21 An1?A*=?A??12A22 An2?? ? ???AA?1n2n Ann注意到?A 的转置矩阵为 2-7)2-8)( ( T 可推出A的伴随矩阵为 ?a11??a12
正定矩阵及其应用
正定矩阵及其应用
本科毕业论文(设计) 正定矩阵及其应用 学生姓名:学号: 专业:指导老师: 答辩时间:装订时间:
A Graduation Thesis (Project) Submitted to School of Science,Hubei University for Nationalities In Partial Fulfillment of the Requiring for BS Degree In the Year of 2016 Positive definite matrices and their applications Student Name: Student No.: Specialty:s Supervisor: Date of Thesis Defense: Date of Bookbinding:
摘要 矩阵是高等代数里的一个基本概念,是代数知识的基础,是矩阵代数的一个主要研究对象. 它不仅是数学的一个重要分支,而且已经成为现在科技领域处理有限维空间形式与数量关系的强有力的工具. 而正定矩阵是从矩阵延伸出来的具有特殊性质的矩阵,是研究二次型的基础,在函数、不等式中都有应用,因此正定矩阵的特殊性质和广泛应用得到了许多学者关注,进而对此进行了大量的研究. 本文从矩阵最基本的概念和性质出发,由浅入深,层层递进. 从矩阵的性质出发,给出了正定矩阵定义及其等价定义,归纳整理了正定矩阵的性质及其部分证明,总结了正定矩阵的判定定理,最后研究正定矩阵在理论证明和在函数极值中的应用. 关键词:矩阵正定二次型正定矩阵极值
矩阵可逆的若干判别方法.doc
山西师范大学本科毕业论文 矩阵可逆的若干判别方法 姓名郭晓平 院系数学与计算机科学学院专业数学与应用数学 班级0701班 学号0751010139 指导教师宋蔷薇 答辩日期 成绩
矩阵可逆的若干判别方法 内容摘要 对线性代数和代数学而言,矩阵是一个主要研究对象和重要工具,其中可逆矩阵又是矩阵运算理论的整体不可或缺的一部分。在矩阵理论,可逆矩阵所占的地位是不可替代的,在坐标轴旋转变换公式的矩阵表示、线性变换、线性方程组等理论研究中,它均有重要意义。而且由于在许多有关数学、物理,经济的实际问题中,常常需要通过建立合适的数学模型化为线性代数和代数学等的问题,因此可逆矩阵也是解决实际问题比较常用的工具之一。鉴于可逆矩阵具有重要的理论和实践意义,研究矩阵可逆的判别方法也就相当有必要了。 本文结合所学知识并查阅相关资料,系统地整理并归纳总结了十一种矩阵可逆的判别方法及其证明过程。其中,可逆矩阵判别方法主要包括定义判别法、伴随矩阵判别法、初等变换判别法、线性方程组法、矩阵向量组的秩判别法等。另外,本文还给出了十种特殊矩阵可逆性的相关结论,最后针对这些判别方法选取了典型的例题,以便我们更好的掌握矩阵可逆的判别方法。 【关键词】矩阵逆矩阵初等变换伴随矩阵线性方程组
Some Methods for Judging Invertible Matrix Abstract The matrix is a main research subject and an important tool in linear algebra and algebra. The invertible matrix, which plays the role of the invertible number in rational numbers, is an essential part of the matrix theory. The very important status ,which the invertible matrix holds in the matrix theory ,can not be replaced. It has the important meaning for solving linear equations, linear transformation theory problems, rotating coordinate transform formula of matrix representation theory. And In solving practical problems such as mathematics, physics, economic and other fields, it is often need to establish proper mathematical models into linear algebra and algebra issues. Therefore it also is a commonly used tool, which is widely applied in practical problem. In view of the fact that the invertible matrix has important significance in both theory and practice, the study of judging invertible matrix is quite necessary. Through combining with my knowledge, referring to the relevant materials, this paper systematically organizes and summarizes eleven kinds of methods for judging invertible matrix ,which contain definition method, the adjoin matrix method, elementary transformation method, linear equations method and so on ,and the proof process. This paper also gives ten special matrix invertible conclusions. Finally, this paper selects several typical examples aiming at these discriminate methods, so that we know the methods for judging invertible matrix. 【Key Words】matrix inverse matrix elementary transformation adjoin matrix Linear equations
考研线性代数重点内容和典型题型
考研线性代数重点内容和典型题型 线性代数在考研数学中占有重要地位,必须予以高度重视.线性代数试题的特点比较突出,以计算题为主,证明题为辅,因此,专家们提醒广大的xx年的考生们必须注重计算能力.线性代数在数学一、二、三中均占22%,所以考生要想取得高分,学好线代也是必要的。下面,就将线代中重点内容和典型题型做了总结,希望对xx年考研的同学们学习有帮助。 行列式在整张试卷中所占比例不是很大,一般以填空题、选择题为主,它是必考内容,不只是考察行列式的概念、性质、运算,与行列式有关的考题也不少,例如方阵的行列式、逆矩阵、向量组的线性相关性、矩阵的秩、线性方程组、特征值、正定二次型与正定矩阵等问题中都会涉及到行列式.如果试卷中没有独立的行列式的试题,必然会在其他章、节的试题中得以体现.行列式的重点内容是掌握计算行列式的方法,计算行列式的主要方法是降阶法,用按行、按列展开公式将行列式降阶.但在展开之前往往先用行列式的性质对行列式进行恒等变形,化简之后再展开.另外,一些特殊的行列式(行和或列和相等的行列式、三对角行列式、爪型行列式等等)的计算方法也应掌握.常见题型有:数字型行列式的计算、抽象行列式的计算、含参数的行列式的计算.关于每个重要题型的具体方法以及例题见《xx 年全国硕士研究生入学统一考试数学120种常考题型精解》。 矩阵是线性代数的核心,是后续各章的基础.矩阵的概念、运算及理论贯穿线性代数的始终.这部分考点较多,重点考点有逆矩阵、
伴随矩阵及矩阵方程.涉及伴随矩阵的定义、性质、行列式、逆矩阵、秩及包含伴随矩阵的矩阵方程是矩阵试题中的一类常见试题.这几年还经常出现有关初等变换与初等矩阵的命题.常见题型有以下几种:计算方阵的幂、与伴随矩阵相关联的命题、有关初等变换的命题、有关逆矩阵的计算与证明、解矩阵方程。 向量组的线性相关性是线性代数的重点,也是考研的重点。xx 年的考生一定要吃透向量组线性相关性的概念,熟练掌握有关性质及判定法并能灵活应用,还应与线性表出、向量组的秩及线性方程组等相联系,从各个侧面加强对线性相关性的理解.常见题型有:判定向量组的线性相关性、向量组线性相关性的证明、判定一个向量能否由一向量组线性表出、向量组的秩和极大无关组的求法、有关秩的证明、有关矩阵与向量组等价的命题、与向量空间有关的命题。 往年考题中,方程组出现的频率较高,几乎每年都有考题,也是线性代数部分考查的重点内容.本章的重点内容有:齐次线性方程组有非零解和非齐次线性方程组有解的判定及解的结构、齐次线性方程组基础解系的求解与证明、齐次(非齐次)线性方程组的求解(含对参数取值的讨论).主要题型有:线性方程组的求解、方程组解向量的判别及解的性质、齐次线性方程组的基础解系、非齐次线性方程组的通解结构、两个方程组的公共解、同解问题。 特征值、特征向量是线性代数的重点内容,是考研的重点之一,题多分值大,共有三部分重点内容:特征值和特征向量的概念及计算、