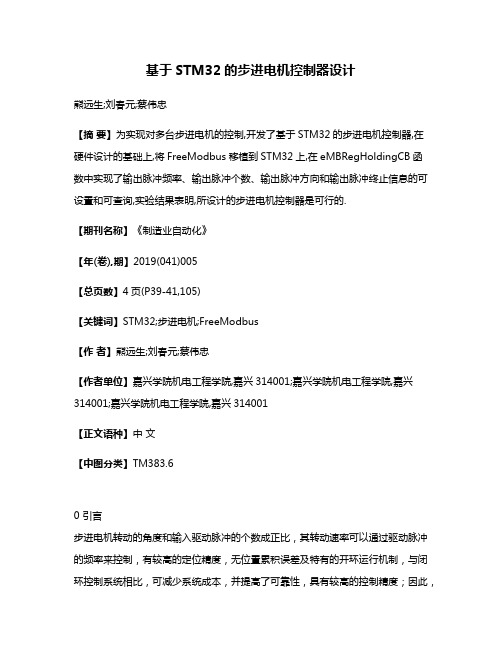
STM32 步进电机、直流电机控制原理图
单片机驱动步进电机电器原理部分细节图

4.4 步进电机与微型机的接口电路
由于步进电机的驱动电流较大,
所以微型机与步进电机的连接都需要专门的
接口及驱动电路。
驱动器可用大功率复合管,也可以是专门的驱动器。
总之,只要按一定的顺序改变8713脉冲分配器的 13脚~15脚 三位通电的状况,即可控制步进电机依选定的方向步进。
由于步进电机运行时功率较大,可在微型机与驱动器之间增加一级光电隔离器(一是抗干扰,二是电隔离。
)以防强功率的干扰信号反串进主控系统。
电路图如下所示:
图4.5 单片机与步进电机的接口电路图
1. 图中 K1、K2、K3、K4按钮分别控制步进电机正转、反转、加速、减速。
2. 因为我们讨论的是三相六拍的工作方式,所以P0.4和P0.6接高电平,P0.7接低电平。
3. P0.0输出步进脉冲。
4. P0.1控制步进电机的转向。
基于STM32的步进电机控制器设计
基于STM32的步进电机控制器设计熊远生;刘春元;蔡伟忠【摘要】为实现对多台步进电机的控制,开发了基于STM32的步进电机控制器,在硬件设计的基础上,将FreeModbus移植到STM32上,在eMBRegHoldingCB函数中实现了输出脉冲频率、输出脉冲个数、输出脉冲方向和输出脉冲终止信息的可设置和可查询,实验结果表明,所设计的步进电机控制器是可行的.【期刊名称】《制造业自动化》【年(卷),期】2019(041)005【总页数】4页(P39-41,105)【关键词】STM32;步进电机;FreeModbus【作者】熊远生;刘春元;蔡伟忠【作者单位】嘉兴学院机电工程学院,嘉兴314001;嘉兴学院机电工程学院,嘉兴314001;嘉兴学院机电工程学院,嘉兴314001【正文语种】中文【中图分类】TM383.60 引言步进电机转动的角度和输入驱动脉冲的个数成正比,其转动速率可以通过驱动脉冲的频率来控制,有较高的定位精度,无位置累积误差及特有的开环运行机制,与闭环控制系统相比,可减少系统成本,并提高了可靠性,具有较高的控制精度;因此,在精度要求不高的运动控制系统中,在工业领域得到了大量应用[1,2]。
为进一步提高控制精度,在实际应用中广泛应用步进电机细分驱动器,细分驱动器一般提供三个输入接口信号,ENA信号为脱机信号(低电平有效),当此输入控制端为低时,电机励磁电流被关断,电机处于脱机自由状态,此信号在大多数应用时一般悬空,DIR信号方向电平信号输入端,高低电平控制电机正/反转,PUL步进脉冲信号输入,每个信号提供两个输入端,内部用光耦实现隔离。
在工业控制中,有很多应用场合需要在上位机控制多个步进电机同时工作,如在水位传感器的初始螺栓位置调整中,为提高工作效率,希望10个步进电机在上位机控制下带动10个传感器同时进行位置调整。
但是上位机一般不能直接连接细分驱动器,通常采用PLC的普通输出端口连接细分驱动器的DIR信号,PLC的脉冲输出端口连接细分驱动器的PUL信号,PLC与上位机之间通过RS485连接。
步进电机工作原理及驱动器电路设计

步进电机工作原理及驱动器电路设计(含源程序)步进电机工作原理及驱动器设计步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
采用STM32控制L6470步进电机驱动器
采用STM32控制L6470步进电机驱动器【摘要】常用的步进电机控制器,根据不同的运动方式需要由单片机发出不同频率的和数目的脉冲信号到专用控制芯片,而ST公司的数字控制电机驱动芯片L6470内部数字控制系统可实现完备的运动曲线控制方案,只需要使用单片机发出命令告诉它要怎样运动即可,简化了电路和程序。
【关键词】数字控制内核;微步;STM32;SPI接口步进电机是将电脉冲信号变为电机角位移的或机电执行元件,步进驱动器接收到一个脉冲,电机旋转一个固定的角度,非常适合单片机控制,因此可以用单片机控制脉冲的数量来控制电机的旋转角度,控制脉冲的频率来控制电机的旋转速度,而改变电机电流的方向可以改变电机的旋转方向。
ST公司的L6470省去了单片机的这些工作,单片机只要通过命令告诉L6470以什么样的速度运行到什么位置停止,电机就会在L6470数字内核的控制下按指定方式运行,这些只要发送一个函数命令即可,剩下的就交给L6470去完成。
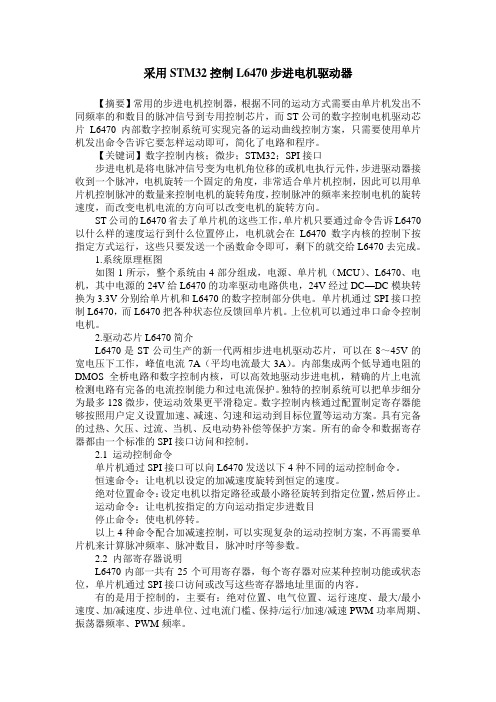
1.系统原理框图如图1所示,整个系统由4部分组成,电源、单片机(MCU)、L6470、电机,其中电源的24V给L6470的功率驱动电路供电,24V经过DC—DC模块转换为3.3V分别给单片机和L6470的数字控制部分供电。
单片机通过SPI接口控制L6470,而L6470把各种状态位反馈回单片机。
上位机可以通过串口命令控制电机。
2.驱动芯片L6470简介L6470是ST公司生产的新一代两相步进电机驱动芯片,可以在8~45V的宽电压下工作,峰值电流7A(平均电流最大3A)。
内部集成两个低导通电阻的DMOS全桥电路和数字控制内核,可以高效地驱动步进电机,精确的片上电流检测电路有完备的电流控制能力和过电流保护。
独特的控制系统可以把单步细分为最多128微步,使运动效果更平滑稳定。
数字控制内核通过配置制定寄存器能够按照用户定义设置加速、减速、匀速和运动到目标位置等运动方案。
具有完备的过热、欠压、过流、当机、反电动势补偿等保护方案。
基于stm32103的步进电机控制系统设计

基于stm32103的步进电机控制系统设计步进电机是一类常用的电机,广泛应用于控制系统中。
本文旨在介绍步进电机及其在控制系统中的应用,并概述本文的研究目的和重要性。
步进电机是一种将电脉冲信号转换为旋转运动的电机。
构成和工作方式步进电机由定子、转子和驱动电路组成。
定子是电磁铁,可以根据输入的电流控制电磁铁产生磁场。
转子是由磁性材料制成的旋转部分,定子的磁场会使得转子受到磁力的作用而旋转。
步进电机的工作方式是通过不断输入脉冲信号来控制电机的运动。
每一次输入一个脉冲信号,步进电机就会转动一定的步进角度。
步进角度取决于步进电机的类型和驱动电路的设置,常见的步进角度有1.8度和0.9度。
输入脉冲信号旋转的步进角度输入脉冲信号的频率和方向决定了步进电机的转动速度和方向。
每一个脉冲信号的到来,步进电机会按照预定的步进角度旋转。
例如,若步进电机的步进角度为1.8度,那么每接收一个脉冲信号,步进电机就会旋转1.8度的角度。
综上所述,步进电机通过输入脉冲信号实现了精确而可控的旋转运动。
本文将阐述基于STM单片机的步进电机控制系统设计。
该设计包括硬件电路设计和软件程序设计。
本文将介绍如何通过STM与步进电机进行通信和控制,以实现预定的步进运动。
步进电机控制系统的硬件电路设计主要包括以下部分:步进电机驱动电路:通过STM的GPIO口控制步进电机驱动电路,实现电机的正转、反转和停止等操作。
电源电路:为步进电机提供稳定的电源供电,保证系统正常工作。
外设接口:设计相应的接口电路,实现STM与外部设备的连接。
步进电机控制系统的软件程序设计主要涉及以下方面:初始化设置:在程序开始运行时,对STM进行初始化设置,包括引脚配置、时钟设置等。
步进电机驱动程序:编写相应的程序代码,通过GPIO口控制步进电机的驱动电路,实现电机的正转、反转和停止等操作。
运动控制程序:编写相应的程序代码,通过控制步进电机的驱动电路,实现预定的步进运动,包括移动一定的步数、以特定的速度旋转等。
STM32控制步进电机程序
STM32控制步进电机程序1.主函数#include\#include\#include\#include\#include\#include\intmain(void){u8t;u32v=1 00;stm32_clock_init(9);//系统时钟设置delay_init(72);//延时初始化uart_init(72,9600);//串口初始化led_init();//初始化与led连接的硬件接口key_init();//初始化与按键连接的硬件接口rcc->apb2enr|=1<<2;//使能porta时钟gpioa->crl&=0x0fffffff;gpioa->crl|=0x30000000;//pa7推挽输出gpioa->odr|=1<<7;//pa7输出高gpioa->crl&=0xff0fffff;gpioa->crl|=0x00300000;//pa5推挽输出gpioa->odr|=1<<5;//pa5输出高led1=1;led0=1;while(1){t=key_scan(0);//得到键值switch(t){casekey0_pres:v=v+10;tim3_int_init(v,7199);//10khz的计数频率tim3->cr1|=0x01;break;casekey1_pres:v=v-10;tim3_int_init(v,7199);//10khz的计数频率tim3->cr1|=0x01;//CX600X定时器3break;casewkup_pres:tim3->cr1&=0xfe;//关定时器3;break;}}}2.led初始化#include\#include\voidled_init(void){rcc->apb2enr|=1<<2;//CX600Xporta时钟rcc->apb2enr|=1<<5;//CX600Xportd时钟gpioa->crh&=0xfffffff0;gpioa->crh|=0x00000003;//pa8推挽输出gpioa->odr|=1<<8;//pa8输出高gpiod->crl&=0xfffff0ff;}gpiod->crl|=0x00000300;//pd.2推挽输入gpiod->odr|=0x0004;//pd.2输入低3.按键初始化#include\#include\voidkey_init(void){rcc->apb2enr|=1<<2;//CX600Xporta时钟rcc->apb2enr|=1<<4;//CX600Xportc时钟jtag_set(swd_enable);//停用jtag,打开swdgpioa->crl&=0xfffffff0;//pa0设置成输出gpioa->crl|=0x00000008;gpioa->crh&=0x0fffffff;//pa15设置成输入gpioa->crh|=0x80000000;gpioa->odr|=1<<15;//pa15上拉,pa0预设下拉gpioc->crl&=0xff0fffff;//pc5设置成输出gpioc->crl|=0x00800000;gpioc->odr|=1<<5;//pc5上拉}u8key_scan(u8mode){staticu8key_up=1;//按键按抬起标志if(mode)key_up=1;//积极支持连按if(key_up&&(key0==0||key1==0||wk_up==1)){delay_ms(10);//回去晃动key_up=0;if(key0==0)returnkey0_pres;elseif(key1==0)returnkey1_pres;elseif(wk_u p==1)returnwkup_pres;}elseif(key0==1&&key1==1&&wk_up==0)key_up=1;return0;//无按键按下}4.定时器初始化#include\#include%u32i=0;//定时器3中断服务程序voidtim3_irqhandler(void){if(tim3->sr&0x0001)//溢出中断{//gpioa->odr^=0x0100;gpioa->odr^=0x0080;led0=!led0;}tim3->sr&=~(1<<0);//去除中断标志位}voidtim3_int_init(u16arr,u16psc){rcc->apb1enr|=1<<1;//tim3时钟使能tim3->arr=arr;//设定计数器自动重装值tim3->psc=psc;//预分频器设置tim3->dier|=1<<0;//允许更新中断//tim3->cr1|=0x01;//使能定时器3my_nvic_init(3,3,tim3_irqn,2);//抢占市场3,子优先级3,组与2}。
一种步进电机运动控制系统设计——基于stm32系列单片机
冲的个数成正 比, 在时间上与输入脉冲同步 , 因此只
要控制输入驱动器脉 冲的数量 、 频率, 便可获得所需 的转角与转速。这种驱动方式非常适合于单片机控 制。如图 1 所示 , 单片机控制步进 电机驱动器一般 只需要 3 根连接线 , 从单片机这边看 , 一根是脉冲输
进电机的加速段 , 步进频率从 v 上升到 V , 0 l这里可 以是线性升速或其他升速曲线。T 到 1 1 2是匀速运 行阶段 , 步进频率不变。1 2到 J I 3时刻是步进电机
减速段 。
在步进 电机运动控制系统 中, 当有脉冲输入步 进电机驱动器时, 驱动器驱动步进电动机转动 , 每一 个脉冲信号 , 步进 电机转动一定 的角度。这个角度 和步进电机 的结构以及驱动器对驱动电流的细分有
图 2 典型 的步进 电机运行频 率
4 2
甘
肃
科
技
第 2 卷 7
为了产生符合 图 2要求 的脉 冲, 在软件设计上 结合 s 3 系列单片机的特点 , t 2 m 参考有关文献 , 以及
笔者在工作中的实践 , 以采取如下两种方式。 可
2 1 定 时器 中断 方式 .
这是较常用的方法。升速或减速的频率和步数 已经以数组的方式存储在单片机的 F A H中, LS 数组 中的数据必须结合 电机的资料和反复的实验来确定 最佳 的值。把 升减 速 表 的第 一个 值 装 人定 时器 TM1 I 的装载寄存器 , 启动定时器 TM , I 1 而后在每个 定时器中断到来时, 首先输出一个脉冲信号 , 然后根
出, 一根是方向电平输出, 还有一根是地线 。根据使
用步进电机的不 同, 驱动器也分为 2相步进驱动器、 3 步进 驱 动器 、 步进 驱 动 器等 不 同种 类 , 般 相 5相 一 其驱动电流可调, 驱动电流的细分数也可调。
基于stm32控制的步进电机程序代码
基于stm32控制的步进电机程序代码本文将介绍如何使用STM32控制步进电机,并提供相应的程序代码供参考。
步进电机是一种常用的电动机,其运动是通过控制电流来实现的。
通过STM32微控制器,我们可以灵活地控制步进电机的转动速度、方向和步数。
步进电机简介步进电机是一种特殊的电动机,可以将固定的角度转动称为步进角。
它由多个电磁线圈和齿轮组成,通过不同的相序控制电流的通断,从而实现转动。
步进电机通常有两种工作方式:全步进和半步进。
全步进模式下,步进电机按照一定的相序依次通断电流,从而实现转动。
半步进模式下,步进电机可以在每个全步进之间以半个步进的方式运行。
全步进模式有较高的转动精度,半步进模式有更高的分辨率。
STM32控制步进电机STM32是意法半导体(STMicroelectronics)公司开发的一款高性能32位单片机。
它具有丰富的外设和强大的处理能力,适合于使用步进电机的应用。
步进电机可以通过动态控制电流和相序来实现精确的转动。
对于STM32来说,我们可以使用GPIO来控制步进电机的相序,通过PWM输出来控制步进电机的电流大小。
以下是一个实现步进电机控制的示例代码:#include "stm32f1xx.h"#include "stm32f1xx_nucleo.h"// 定义步进电机的相序uint8_t sequence[] = {0x0C, 0x06, 0x03, 0x09};// 定义当前相序的索引uint8_t sequence_index = 0;// 定义当前步进的方向uint8_t direction = 0;// 定义每个相序的持续时间(单位:毫秒)uint16_t sequence_delay = 10;// 初始化GPIO和PWMvoid init_GPIO_PWM() {// 初始化GPIO口GPIO_InitTypeDef GPIO_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// 初始化PWMRCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Period = 999;TIM_TimeBaseInitStruct.TIM_Prescaler = 0;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStruct);TIM_OCInitTypeDef TIM_OCInitStruct;TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStruct.TIM_Pulse = 500;TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM1, &TIM_OCInitStruct);TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_Cmd(TIM1, ENABLE);}// 控制步进电机的转动void step_motor_control() {// 设置当前相序GPIO_Write(GPIOA, sequence[sequence_index]);// 切换方向if (direction == 0) {sequence_index++;if (sequence_index >= 4) {sequence_index = 0;}} else {sequence_index--;if (sequence_index < 0) {sequence_index = 3;}}// 延时一段时间HAL_Delay(sequence_delay);}int main(void) {// 初始化GPIO和PWMinit_GPIO_PWM();while (1) {// 控制步进电机的转动step_motor_control();}}以上示例代码通过包含STM32 HAL库(HAL库是ST公司提供的一套可移植的硬件抽象层)来实现GPIO和PWM的初始化。
四相步进电机原理图及程序
四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
stm32步进电机丝杆位移程序
stm32步进电机丝杆位移程序stm32步进电机丝杆位移程序实现了一种精确控制和定位电机的方法,可以用于各种应用领域,如机器人、自动化设备、3D打印等。
本文将从简单到复杂的角度逐步介绍stm32步进电机丝杆位移程序的原理和实现方法,以便读者能够全面、深刻和灵活地理解此概念。
1. 什么是stm32步进电机丝杆位移程序stm32步进电机丝杆位移程序是一种控制和定位步进电机的程序,通过调整电机的脉冲信号和方向信号,可以实现电机的精确移动和定位。
步进电机是一种特殊的电机,通过在特定时间间隔内发送脉冲信号来控制电机的转动角度。
丝杆是一种传动装置,可以将旋转运动转换为线性运动,并实现精确的位移。
将丝杆和步进电机结合起来,就可以实现精确的线性位移控制。
2. stm32步进电机丝杆位移程序的原理stm32步进电机丝杆位移程序的原理基于步进电机的特性和丝杆的运动原理。
步进电机通过接收来自控制器的脉冲信号和方向信号来进行转动,每接收到一个脉冲信号,电机就会转动一个固定的角度。
而丝杆则通过转动运动将电机的旋转角度转化为线性位移,从而实现精确的位移控制。
通过控制脉冲信号的数量和频率,可以控制电机的转动速度和位移精度。
3. stm32步进电机丝杆位移程序的实现方法stm32步进电机丝杆位移程序的实现方法可以分为硬件和软件两个方面。
在硬件方面,需要使用stm32开发板、步进电机驱动模块和丝杆装置。
开发板用于控制步进电机的脉冲信号和方向信号的生成,步进电机驱动模块用于驱动步进电机的转动,丝杆装置用于将步进电机的旋转运动转换为线性位移。
在软件方面,需要编写控制程序来生成脉冲信号和方向信号,并控制步进电机的转动。
通过合理的控制程序设计,可以实现精确的位移控制和定位。
4. 我对stm32步进电机丝杆位移程序的个人观点和理解在我看来,stm32步进电机丝杆位移程序是一种非常实用和高效的控制方法,可以广泛应用于各种领域。
它具有精确的位移控制和定位能力,可以实现高度的自动化和精确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PA7/SPI1_MOSI/ADC7/TIM3_CH2/TIM8_CH1N
PA9/U1_TX/TIM1_CH2
PC4/ADC14
PA8/TIM1_CH1/MCO
PC5/ADC15
PC9/TIM8_CH4/SDIO_D1
PB0/ADC8/TIM3_CH3/TIM8_CH2N
PC8/TIM8_CH3/SDIO_D0
103
57 PB5
56 PB4
55 PB3
54 PD2
53 PC12
52 PC11
51 PC10
50 PA15
49 PA14
48 47
VDD3.3V
46 PA13
45 USBDP
44 USBDM
43 PA10
42 PA9
41 PA8
40 PC9
39 PC8
38 PC7
37 PC6
36 PB15
35 PB14
VDD3.3V U10
R79
103
PD2
黑白 /进进进进
P3
M-GND P4
102
102
102
前前前
P5
R80
103
备未驱
2 1
R81 R84
CON2 M-VCC 拉拉仓打驱驱
104 104
R90 103
M-A
R89 103
1 2 3
AV B GY
5 4
R82 R86
103 102
SN74AHC1G86DBVT 仓仓仓打检检检驱(异异仓步)
I/O I/O I/O VCC I/O GND I/O I/O I/O I/O I/O
GCK2 GCK1
I/O I/O I/O I/O I/O I/O CTS1 VCC CTS2
44 43 42 41 40 39 38 37 36 35 34
VDD3.3V
+30V Q6 2SJ377
R6
C4
104
C5
L-B VDRD993.3V
拉拉驱驱码光驱驱
103 PC10 无未
PC1/ADC11
PB4/JNTRST/SPI3_MISO
PC2/ADC12
PB3/JTDO/SPI3_SCK/I2S3_CK
PC3/ADC13
PD2/TIM3_ETR/U5_RX/SDIO_CMD
VSSA
PC12/U5_TX/SDIO_CK
VDDA
PC11/U4_RX/SDIO_D3
PA0/WKUP/ADC0/TIM2_CH1_ETR/TIM5_CH1/TIM8_ETPRC10/U4_TX/SDIO_D2
VDD3.3V
100uF/50V
R64
JP4
103
1 2 3
Header 3 横拉仓打驱驱
R69
0.25R
E
PC9 R71
0
U9
16 15 14 13 12 11 10
9
LDSUP OUTB D0 GND GND SEN OUTA D1
PFD REF RC GND GND VCC PHASE
D2
A3955SLBTR-T
PB9/TIM4_CH4/SDIO_D5
PC15/OSC32
PB8/TIM4_CH3/SDIO_D4
PD0/OSCIN
BOOT0
PD1/OSCOUT
PB7/I2C1_SDA/TIM4_CH2
NRST
PB6/I2C1_SCL/TIM4_CH1
PC0/ADC10
PB5/I2C1_SMBA/SPI3_MOSI/I2S3_SD
PB1/ADC9/TIM3_CH4/TIM8_CH3N
PC7/I2S3_MCK/TIM8_CH2/SDIO_D7
PB2/BOOT1
PC6/I2S2_MCK/TIM8_CH1/SDIO_D6
PB10/I2C2_SCL/U3_TX
PB15/SPI2_MOSI/I2S2_SD/TIM1_CH3N
PB11/I2C2_SDA/U3_RX
182
+5.0V
R40
R41
U6
24 VREFa
VSa 20
ISP仓步
D9
VCC12
1N5822 D10
+30V
1N5822
+12V
C
104
103
104
R45 R46
C42
R44 103 R47 103
103 103
11
VREFb
VSb 17
D12
C40
C41
U7
1 2 3 4
A0 VCC A1 TEST A2 SCL G SDA
PA1/ADC1/TIM2_CH2/TIM5_CH2
PA15/JTDI/SPI3_NSS/I2S3_WS
PA2/U2_TX/ADC2/TIM2_CH3/TIM5_CH3
PA14/JTCK/SWCLK
PA3/U2_RX/ADC3/TIM2_CH4/TIM5_CH4
VDD
VSS
VSS
VDD
PA13/JTMS/SWDIO
C15
C16 100uF/50V
Q1
7 5 2 3 6
VIN BOOT ENA NC PH NC VSNS GND
1
8 4
103
9 PwPd
R20 S8050
B
101
R32
PGND
103
VDD3.3V PC0
D7 +5.0V
R36
1N5822
U5
L1 22uH
D3 B340A
TP1 +5.0V
R5 103 C9 220uF/12V
/R1OUT R1OUT R2OUT R3OUT
R1IN R2IN R3IN
/ONLINE /SHUTDOWN /STATUS
2 GND
C3 27
104
V-232C12 4
104
5 6 7 10 232_TXD 12
8 232_RXD 9 232_DTR 11 232_RTS
R29 R30 103 103
12 13 PA0 14 PA1 15 PA2 16 PA3 17 18 19 PA4 20 PA5 21 PA6 22 PA7 23 PC4 24 PC5 25 PB0 26 PB1 27 PB2 28 PB10 29 PB11 30 31 32
VBAT
VDD
PC13/ANT1
VSS
PC14/OSC32
JP1
20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Header 20 打打喷驱驱
VDD3.3V C1 104
VCC 26
1 C6
104 3
VDD3.3V
28 C13
104 25
NRST
R11
103 D5
IN4148
24
R10
23
103
22
PA9
VDD3.3V
C38
C39
Header 6 JTAG
打打喷驱驱仓步
VDD3.3V
C33 C34 C35 C36 104 104 104 104
VDD3.3V
R38 103 D11
IN4148 NRST
C37 104
R42 103 R43 103
TP4
R37 VDD3.3V
C31 68nF
562
R39
R8
PB1 R1 PA7 R2 PA5 R3 PA8 R4
3241 TP2
L2
P+12V
22uH
R14
103
C17
D6 1000uF/25V
B340A
R24
112
PC4
R33
103
R15 103
R22C18 102 20pF
TP3
0 0 0 101
C8 20pF
C10 C11 104 104
P_X2 P_X3
PB14/SPI2_MISO/TIM1_CH2N
VSS
PB13/SPI2_SCK/I2S2_CK/TIM1_CH1N
VDD
PB12/SPI2_NSS/I2S2_WS/I2C2_SMBAI/TIM1_BKIN
64 63
VDD3.3V
62 PB9
61 60
PB8 BOOT0
R52
59 PB7 58 PB6
1
2
3
4
5
6
7
8
D1
VCC12
U1
J1 +30VD21N5822
TPS5430DDA
C2
A
1 2
7 5 1N5822C7 2
仓电电电仓仓
3
6
D4
100uF/50V
VIN BOOT ENA NC PH NC VSNS GND
1
8 4
103
SMCJ30A
9 PwPd
PGND
U3
+30V
TPS5430DDA
P_X4 P_X5 P_X6 P_X7 TDI TMS TCK
1 2 3 4 5 6 7 8 9 10 11
GCK3 I/O I/O GND I/O I/O I/O I/O TDI TMS TCK
JP3 VDD3.3V
1 2 3
TDI
R31
TCK R34
4
5
6
12 13 14 15 16 17 18 19 20 21 22