最优控制问题的LQR方法比较分析
最优控制问题的LQR方法比较

最优控制问题的LQR方法比较最优控制是指在给定一定约束条件下,选取最佳控制策略使得系统能达到最优性能的方法。
在最优控制问题中,最常使用的方法之一是线性二次调节(LQR)方法。
本文将比较LQR方法在最优控制问题中的优势和劣势。
一、LQR方法的基本原理和步骤LQR方法是一种基于状态反馈的最优控制方法,它的实现需要以下几个基本步骤:1. 系统建模:将待控制系统以状态空间模型的形式表示,得到系统的状态方程和输出方程。
2. 性能指标定义:确定系统的性能指标,如最小化控制输入开销、系统的稳定性等。
3. 状态反馈控制器设计:通过构造一个反馈控制律,将系统状态与控制输入联系起来。
4. 权重矩阵选择:为了平衡系统性能的不同要求,需要选择合适的权重矩阵Q和R。
5. 解析求解:利用Riccati代数方程,求解状态反馈控制器的增益矩阵,得到最优解。
二、LQR方法的优势1. 简单易实现:LQR方法利用线性二次型性能指标,可以通过求解Riccati代数方程直接得到控制器增益矩阵,无需过多复杂的计算。
2. 数学基础扎实:LQR方法建立在均衡理论和线性系统理论的基础上,具有较为严格的数学推导和理论支持。
3. 稳定性分析:LQR方法可以通过权重矩阵的选择来平衡系统的稳定性和性能指标,在系统可控、可观的条件下,保证系统的稳定性。
4. 多目标优化:LQR方法允许通过调整权重矩阵的取值来平衡不同的性能指标,实现多目标优化。
三、LQR方法的劣势1. 线性化要求:LQR方法要求系统能够通过状态变量的线性组合来描述,因此对于非线性系统,需要进行线性化处理。
2. 状态空间维数限制:LQR方法在求解控制器增益矩阵时需要涉及多维矩阵的运算,对于高维状态空间系统,计算复杂度较高。
3. 对初始状态敏感:LQR方法在计算控制器增益矩阵时,需要提供初始状态的信息,对于初始状态信息的误差较为敏感。
四、LQR方法与其他最优控制方法的比较1. 与最小时间问题(Minimum Time Problem)相比:LQR方法主要关注系统稳定性和控制输入开销的最小化,而最小时间问题则追求系统在最短时间内到达给定目标。
最优控制问题的LQR方法比较分析
最优控制问题的LQR方法比较分析最优控制问题一直是控制理论中的重要研究领域,而线性二次调节(LQR)方法作为一种经典的最优控制方法,在工程控制中得到了广泛的应用。
本文将对LQR方法进行比较分析,探讨其在不同情况下的适用性和性能表现。
1. LQR方法基本原理LQR方法是一种基于状态空间模型的最优控制方法,通过设计状态反馈控制器,使得系统状态能够收敛到零点并满足一定性能指标。
其优化目标是最小化系统状态变量的加权二次误差和控制输入的加权二次误差,从而实现系统在有限时间内收敛至稳定状态。
2. LQR方法的应用范围LQR方法在工程控制中广泛应用于系统稳定性分析、跟踪问题、鲁棒性设计等方面。
尤其在机械控制、航空航天、汽车控制等领域有着较为成熟的应用案例。
对于线性、定常、确定性系统,LQR方法通常能够取得较好的控制效果。
3. LQR方法的优势与局限LQR方法能够通过求解Riccati方程来得到最优状态反馈控制器,在控制性能和收敛速度上有着较为显著的优势。
但是LQR方法对于非线性、时变系统的控制效果并不理想,往往需要通过状态线性化或者扩展状态空间方法进行处理,增加了控制器设计的复杂性。
4. LQR方法与其他最优控制方法的比较与其他最优控制方法相比,LQR方法具有计算简单、易于实现的特点,同时在一定条件下能够取得令人满意的控制效果。
相对于最小二乘法、经验控制等方法,LQR方法在理论推导和应用方面更加成熟,具有更强的稳健性和可靠性。
5. 不同情况下的LQR方法选用在实际工程应用中,需要根据系统的具体特点和性能需求来选择是否采用LQR方法。
对于线性稳定系统,LQR方法是一种有效的控制设计方案;而对于非线性、时变系统,则需要考虑是否存在状态线性化的可能性,以及其他更适用的最优控制方法。
综上所述,LQR方法作为一种经典的最优控制方法,在工程控制中具有重要的地位和广泛的应用前景。
通过比较分析,可以更好地理解LQR方法的优势与局限,并在实际应用中选用合适的控制方案,实现系统稳定性和性能指标的优化。
pid, lqr mpc 等相关控制方法思路
pid, lqr mpc 等相关控制方法思路控制方法是指在系统中应用特定的算法和策略来达到某种预期目标的一种方法。
在控制系统中,PID控制、LQR控制和MPC控制是常用的三种控制方法。
下面我将分别介绍这三种方法的思路和应用。
一、PID控制PID控制是一种经典的控制方法,PID是Proportional(比例)、Integral(积分)和Derivative(微分)的缩写。
其思路是通过计算误差的比例、积分和微分来调整控制器的输出,从而实现系统的控制。
具体来说,PID控制器的输出值根据三个部分的计算得到。
比例部分根据误差的大小产生一个反馈输出,与误差成正比。
积分部分根据误差随时间的累积来产生一个反馈输出,可以消除持续的小误差。
微分部分根据误差的变化率来产生一个反馈输出,可以预测误差的未来变化趋势。
PID控制方法简单直观,适用于许多系统。
例如,温度、速度、位置等系统的控制,都可以通过PID控制来实现。
通过调整PID参数,可以使系统达到稳定、快速和准确的响应。
二、LQR控制LQR(Linear Quadratic Regulator)控制是一种优化控制方法,可以应用于线性动态系统。
LQR控制是在系统模型已知的基础上,通过求解一个代价函数的最小值来确定最优的控制器。
LQR控制的基本思路是通过调整状态反馈矩阵和控制输入矩阵,使得系统满足最优控制的要求。
代价函数通常包括系统状态误差的平方和控制输入的平方,通过最小化代价函数可以得到最优的控制器。
LQR控制方法对系统模型的要求较高,需要事先知道系统的线性动态方程和性能指标。
适用于一些对系统性能要求较高的控制问题,如姿态控制、飞行器自动驾驶等。
LQR控制不仅可以提高系统的稳定性和响应速度,还可以优化系统的能耗和控制精度。
三、MPC控制MPC(Model Predictive Control)控制是一种基于模型的预测控制方法,根据系统模型对未来一段时间的系统行为进行预测,并通过求解一个优化问题来确定最优的控制输入。
第4章线性二次型最优控制
λ(t) = [Ω 22 (t f , t) − FΩ12 (t f , t)]−1[FΩ11 (t f , t) − Ω 21 (t f , t)]x(t)
此式表明λ(t)与 x(t)之间存在线性关系。令
λ(t) = P(t)x(t)
考虑Ω(tf ,tf)=I2n╳2n, 即
首先列出该问题的 Hamilton 函数
H
=
1 2
xT
(t)Q(t)x(t)
+
1 2
uT
(t)R(t)u(t)
+
λT [A(t)x(t)
+
B(t)u(t)]
(4-2-3)
因 u(t)不受约束,所以沿最优轨线有
∂H ∂u (t )
=
0
即
∂H ∂u(t)
=
R(t)u(t)
+
BT
(t )λ (t )
=
0
(4-2-4)
则取较小值。 z 若要减少各分量间的关联耦合作用,系数矩阵可不为对角线矩阵,只需
将在系数矩阵中对应关联分量位置的元素取为非零的正数,其大小也依
对消除各分量间关联的重视程度而定,即最优性能指标也可以用于解耦
控制设计。 z 当 Q、R 取为时变矩阵 Q(t)和 R(t)时,可以反映不同时间阶段的系统控
制要求。如当 t = t0 时 e(t)可能很大,但此时并不反映系统的控制性能, 可以将 Q(t)取得较小;当 t→ tf、e(t)减小时,为保证控制系统性能,可 以将 Q(t)逐渐取大。 二次型性能指标中系数矩阵 F、Q、R 的选取在最优控制理论中是受人为因 素影响最大的步骤,对同样的二次型最优控制问题,选取不同的 F、Q、R 所得 到的最优控制规律也是完全不一样的。 (4) 线性二次型最优控制问题的三种类型 依照系统(4-1-1)~(4-1-3)的情况不同,线性二次型最优控制问题可以分为 如下三类: I. 状态调节器问题 此时有 C(t) = I 为单位矩阵,yr(t) = 0,即有 y(t) = x(t) = -e(t) II. 输出调节器问题 此时有 yr(t) = 0,即有 y(t) = -e(t)。 III. 跟踪问题
lqr函数

lqr函数LQR函数(Linear Quadratic Regulator)是一种用于控制理论的经典方法,它可以实现对线性系统进行优化控制。
LQR函数是一个二次型控制器,能够根据系统的状态变量,计算出相应的控制动作,以使系统在指定的性能标准下达到最佳的控制效果。
本文将从LQR函数的原理、优点以及应用范围等方面进行阐述,并探讨LQR函数在现实中的应用价值。
一、LQR函数的原理 LQR函数的原理基于线性系统的数学模型,它将系统状态变量表示为一个向量,例如x=[x1,x2,...,xn]T,控制输入变量表示为一个标量u。
针对此模型,我们可以用一个二次型函数表示系统的状态和控制变量之间的关系,该函数称为LQR成本函数。
LQR成本函数的形式如下:J = ∫(xTQx+uTRu)dt其中,Q和R是正定矩阵,它们代表系统的状态和控制变量之间的权重关系。
Q矩阵的对角线元素越大,代表相应状态变量对系统的影响也越大,R矩阵的值越小,代表对应控制变量对系统的影响也越小。
在优化控制过程中,我们需要最小化成本函数J,以减小系统的误差,并达到控制目标。
根据上述成本函数,我们可以用梯度下降算法来求解最优解。
这个算法的原理是逐渐调整控制变量u的值,直到系统的状态能够达到最优状态。
在此过程中,Q和R的值也随着控制变量的调整而不断变化,以保证系统的最优性能。
LQR函数在使用时需要对系统进行状态空间表示,以求解系统状态方程的解析解。
同时,还需要计算系统的控制增益矩阵K,以将状态方程中的误差转化为控制变量的大小。
根据K矩阵的值,我们可以计算出一个反馈控制器,以实现对系统的闭环控制。
二、LQR函数的优点 LQR函数具有以下优点:1、针对线性系统的优化 LQR函数只适用于线性系统的优化,但正是由于这个原因,LQR函数在控制理论中具有广泛的应用领域。
线性系统中的Jacobian矩阵一般比非线性系统更容易求解,也更易于理解和分析。
2、求解简单 LQR函数只需要对系统进行状态空间表示,并使用梯度下降算法进行优化。
最优控制问题的LQR方法

最优控制问题的LQR方法最优控制是控制理论中的一个重要研究方向,其目标是设计出满足给定性能指标的最优控制器,以使系统在给定约束下实现最佳性能。
LQR (Linear Quadratic Regulator) 方法是一种经典的最优控制方法,被广泛应用于各种实际控制问题中。
LQR方法主要基于线性时不变系统的状态空间方程,通过最小化一个带权重的二次性能指标来设计最优控制器。
在LQR方法中,系统的状态和控制输入被表示为向量形式,系统的动态特性由状态方程和输出方程描述。
通过调整权重矩阵,可以使得系统在给定的性能指标下达到最佳控制效果。
在具体应用LQR方法求解最优控制问题时,需要确定以下几个步骤:1. 系统建模:将实际控制问题建模为线性时不变系统的状态空间方程,确定状态变量、输入变量、输出变量的定义和关系。
2. 确定性能指标:根据具体问题的需求,选择适当的性能指标。
常用的性能指标包括系统响应的稳定性、快速性、平稳性等。
3. 设计权重矩阵:通过对性能指标的重要程度进行赋权,构造出合适的权重矩阵。
权重矩阵的选择将直接影响最优控制器的性能。
4. 求解最优控制器:利用LQR方法,通过求解Riccati方程,可以得到最优的线性状态反馈控制律。
该控制律使得系统在给定性能指标下具有最优性能。
需要注意的是,在实际应用中,系统可能存在参数不确定性或者外部扰动的影响,这会导致模型的不准确性。
为了使得LQR方法更加稳健,可以采用鲁棒控制的思想,将不确定性和扰动纳入考虑,设计出更具鲁棒性的最优控制器。
在实际应用中,LQR方法在机械控制、自动驾驶、航空航天等领域具有广泛的应用。
例如,在飞机的姿态控制中,LQR方法可以通过控制飞机的控制面偏转角度,使得飞机具有稳定的飞行特性。
在机器人控制中,LQR方法可以实现机器人的精确轨迹跟踪和运动平稳控制。
综上所述,LQR方法是一种经典的最优控制方法,在实际应用中具有广泛的应用前景。
通过合理建模、确定性能指标、设计权重矩阵以及求解最优控制器,LQR方法可以有效解决最优控制问题,使得系统在给定约束下实现最佳性能。
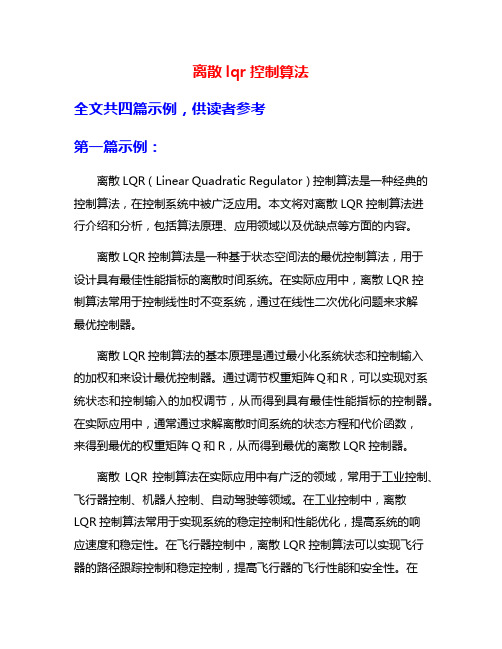
最优控制的LQR案例

1
Optimal Control Formulation
• The system
& x = f (x,u, t ) , x (t 0 ) = x 0
• Performance cost function
J = ∫ l (x,u, t )dt + m(x (T ))
3
Applying Optimality Principle
J (x, t ) = min ∫ l (x,u, t )dt + J * (x1, t1 )
* t1 u[t ,t
1]
{
t
}
this part is optimal for [t1, T] if the whole trajectory is optimal
P(T ) = QT
23
Notes on the LQR solution…
• a state feedback solution K=R-1BTP • n(n+1)/2 terms in P to solve • Does not require x(t0) to solve this problem! Optimal solution is independent of initial state!
24
Infinite Horizon Case, T = ∞
& x = Ax + Bu , y = Cx 1 ∞ T J = ∫ x Qx + uTRu dt 2 0 Q = QT ≥ 0
T
( ( ) R (= R ) > 0
)
25
Infinite Horizon Regulator Notes
离散lqr控制算法
离散lqr控制算法全文共四篇示例,供读者参考第一篇示例:离散LQR(Linear Quadratic Regulator)控制算法是一种经典的控制算法,在控制系统中被广泛应用。
本文将对离散LQR控制算法进行介绍和分析,包括算法原理、应用领域以及优缺点等方面的内容。
离散LQR控制算法是一种基于状态空间法的最优控制算法,用于设计具有最佳性能指标的离散时间系统。
在实际应用中,离散LQR控制算法常用于控制线性时不变系统,通过在线性二次优化问题来求解最优控制器。
离散LQR控制算法的基本原理是通过最小化系统状态和控制输入的加权和来设计最优控制器。
通过调节权重矩阵Q和R,可以实现对系统状态和控制输入的加权调节,从而得到具有最佳性能指标的控制器。
在实际应用中,通常通过求解离散时间系统的状态方程和代价函数,来得到最优的权重矩阵Q和R,从而得到最优的离散LQR控制器。
离散LQR控制算法在实际应用中有广泛的领域,常用于工业控制、飞行器控制、机器人控制、自动驾驶等领域。
在工业控制中,离散LQR控制算法常用于实现系统的稳定控制和性能优化,提高系统的响应速度和稳定性。
在飞行器控制中,离散LQR控制算法可以实现飞行器的路径跟踪控制和稳定控制,提高飞行器的飞行性能和安全性。
在机器人控制和自动驾驶中,离散LQR控制算法可以实现对机器人和车辆的轨迹跟踪控制,实现自动导航和避障功能。
离散LQR控制算法具有许多优点,如控制器设计简单、计算效率高、实时性好等。
通过调节权重矩阵Q和R,可以实现对系统状态和控制输入的灵活调节,从而得到满足不同性能要求的控制器。
离散LQR控制算法还具有稳定性好、收敛速度快等优点,在实际应用中被广泛应用。
离散LQR控制算法也存在一些局限性和缺点,如对系统动态模型的要求较高、权重矩阵的选取较为主观、对测量噪声和模型不确定性较为敏感等。
在实际应用中,需要根据具体系统特点和性能要求来选择合适的权重矩阵Q和R,并进行系统动态模型辨识和参数调节,以实现最优控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最优控制问题的LQR方法比较分析最优控制问题是在给定约束条件下,寻找使性能指标最优化的系统
控制策略。
其中,线性二次型调节(Linear Quadratic Regulator,简称LQR)方法是最常用的最优控制方法之一。
本文将对LQR方法进行比
较分析,以评估其在不同应用场景下的优势和局限性。
一、LQR方法的基本原理
LQR方法是一种基于状态反馈的最优控制方法,其基本原理是通过
设计一个状态反馈控制器,使系统的状态能够最优地满足给定的性能
指标。
在LQR方法中,系统的动态方程通常采用线性二次型形式,即
状态方程和输出方程都是线性的,并且性能指标是使用二次型函数表
示的。
二、LQR方法的优点
1. 数学求解简单:LQR方法通过使用线性二次型函数,可以将最优
控制问题转化为求解代数矩阵方程的问题,这种数学求解方法相对较
为简单。
2. 稳定性优良:LQR方法设计的控制器通常能够保持系统的稳定性,即在给定约束条件下,系统能够保持在一个稳定的状态。
3. 对噪声鲁棒性强:LQR方法能够通过状态反馈控制器的设计,有
效抑制系统受到噪声的影响,提高系统的鲁棒性。
三、LQR方法的局限性
1. 对系统的线性化要求较高:LQR方法基于线性二次型模型,对系统的线性化要求较高,对于非线性系统的控制效果可能不理想。
2. 无法处理部分状态可观测的问题:LQR方法要求系统的所有状态均可观测,而在实际应用中,部分状态可能无法直接测量,这时LQR 方法无法有效处理。
3. 性能指标权重选择困难:LQR方法中,性能指标的权重需要人为选择,对于复杂系统而言,正确选择权重较困难。
四、LQR方法在实际应用中的案例分析
1. 机械控制系统:LQR方法在机械控制系统中得到广泛应用,比如飞机、车辆等的姿态控制问题。
通过选择合适的性能指标权重和状态反馈增益,LQR方法可以实现稳定且鲁棒的控制效果。
2. 电力系统稳定控制:LQR方法在电力系统中可以用于实现电压、频率的稳定控制。
通过控制发电机的励磁和机械输入,LQR方法可以使系统维持在稳定状态。
3. 人工智能:LQR方法在强化学习中也有应用,通过将环境模型线性化,并使用LQR方法进行状态反馈控制,实现智能体的最优控制策略。
总结:
LQR方法作为最优控制的一种方法,具有数学求解简单、稳定性优良、对噪声鲁棒性强等优点。
然而,对系统的线性化要求较高、无法处理部分状态可观测问题以及性能指标权重选择困难等局限性仍然存
在。
在实际应用中,LQR方法在机械控制系统、电力系统稳定控制以及人工智能等领域中得到了广泛的应用。
因此,在选择控制方法时,需要综合考虑具体问题的特性和LQR方法的优势与局限性,以及与其他最优控制方法相比的优劣,从而选择最适合的控制策略。