码垛机器人结构设计与运动分析
基于Creo的四轴码垛机器人伺服电机负载转动惯量计算

Four-Axis Palletizing Robot Based on Creo
文德刚,相宁波,常志轩
(山东临工工程机械有限公司,山东 临沂 276023)
WEN De-gang, XIANG Ning-bo, CHANG Zhi-xuan
(Shandong Lingong Constr uction Machiner y Co. Ltd., Linyi 276023, China) 【摘 要】针对一种直角坐标码垛机器人,借助 Cr eo 软件计算出子机构的惯性张量,进而建立码垛机器人整体的转动惯量与其位
1—上部装置;2—工作装置;3—抓手总装
2 研究方法
2.1 回转轴方向恒定机构转动惯量的计算
回转轴指的是实际运动的回转中心轴;回转轴方向恒定
【作者简介】文德刚(1971~),男,山东临沂人,工程师,从事工程机 械研发与制造研究。
256
指的是运动过程中,机构坐标系与回转轴之间没有相对转动。
由刚体力学理论可得:
【Ke ywords 】palletizing r obot; load moment of iner tia; Cr eo
【中图分类号】TP242.2
【文献标志码】A
【文章编号】1007-9467(2019)04-0256-02
【DOI】10.13616/ki.gcjsysj.2019.04.323
of Cr eo softwar e, and then the mathematical model between the over all r otar y iner tia of the stacking r obot and its position and state
was established to pr ovide r efer ence for the selection of ser vo motor . 【关键词】码垛机器人;负载转动惯量;Cr eo
机器人码垛系统研究

创新观察—332—机器人码垛系统研究张城诚(浙江省杭州海康威视电子有限公司,浙江 杭州 310000)随着科技的飞速发展,全世界的工业技术得到飞速的提升,传统的制造业因为效率低、成本高,逐渐的被全自动机器所代替,机器人在很多的领域都大放异彩,码垛机器人作为机器人其中的一个分支,取代传统人工实现企业工业化、精细化、高效率转变。
我国是制造业大国,拥有着全世界最为完整的工业化产链,但是我国并不是制造业强国,在中国制造2025中指出,我国要发展高新工业领域,机器人就是其中最为重要的领域之一。
1工业码垛机器人概述工业机器人作为工业时代后期的产物,机器人是由各种的电气和机械元件组成的,并且可以对其进行程序的编写,使其满足我们的要求,相对于人工有着效率高、自动化程度高、出错率较低等优点。
全球各个国家已经把自动化技术和机器人技术运用到搬运和码垛工作中去。
一些学者提出了基于两种或多个约束条件的规划算法,比如说基于时间最优和冲击力最小等的轨迹规划[7]。
这些算法对机器人控制系统整体性能的提高有着重要意义,从某种角度来说,码垛机器人的应用已经使国外的生产能力和企业效益有了很大的提升。
1.1国内研究及应用现状经过了很长时间的发展,国内的码垛机器人虽然有了一定程度上的提升,但是想和发达国家的码垛机器人相比还是有一定差距的,比如说它的负重能力不强、在速度上也不尽人意,这就造成了效率不高等问题,会使资本产生滞留,不能够完全的投入到生产当中。
国外的码垛机器人相对于国内的码垛机器人有很多的优势,其中最大的优势是在精度上和运行速度上,而且我国只有两种机器人,一种是关节型,也就是体型比较小,相对于灵活,会给施工流出很大的地方,移动起来也是很便捷的。
另外一种是直角坐标型,这种类型适合于一些简单的操作,没有关节型的机器人有优势,所以采用的场合也不是很多。
现在,我国有很多专门研究工业机器人的公司,比如说沈阳自动化,新松机器人、汇川技术等公司,而且我国还有很多的研究机构,政府投入了很多的研究经费专门研究工业机器人。
关节型码垛机械手运动学分析及仿真

组合机床与自动化加工技术
文 章 编 号 :1001—2265(2010)08—0044—04
关 节 型码 垛 机械 手 运动 学 分 析 及仿 真
毛 立 民 ,邹 剑 (东华 大学 纺织装 备教育 部工程研 究 中心 ,上海 201620)
摘 要 :根 据 关 节 型 码 垛 机 械 手 的 结 构 特 点 ,运 用 D —H 方 法 建 立 机 械 手 的 运 动 学 模 型 ,并 对 其 进 行 位
(Donghua University,Engineering Research Center of Advanced Textile Machinery,Ministry of Education, Shanghai 201620,China) .
A bstract:Based on the m echanical structure of the articulated palletizing robot,the robot’S kinem atic m odel is established w ith D -H m ethods,includin g researching positivenegative pose and velocity problem , SO as to get the palletizing robot’S Jacobian and inverse Jacobian,then based on above,robotic palletizing
图 1 码 垛机 械 手 几 何 模 型 及 D-H 坐 标 系
又根据 啤酒 箱 码 垛 作 业 要 求 ,末 端 连 杆 装 载 的
收 稿 日期 :2010一叭 一25;修 回 日期 :20l0—02—26 作 者 简 介 :毛立 民 (1956一 ),男 ,浙 江 江 山 人 ,东 华 大 学 教 授 ,博 士 ,从 事 新 型 纺 织 机 械 设 计 、移 动 机 器 人 和 码 垛 设 备 等 方 面 的 研 究 ,(E
码垛机设计方案
附图 3:提升线
当产品从提升线出来,进入的是整形线(附图 4 所示)。整形线顾名思义是为了将包装袋整 平,使其末端码垛的剁型美观、整齐。整形线分压包整形和震动整形两部分组成。首先包装袋 通过①包胶托辊输送,通过②压包滚筒将包装袋压平。此压包滚筒是高刚性弹簧提供压力,且 工作高度可调,能保证极好的压平效果和使用寿命,亦不会破坏包装袋和包装产品。从压包滚 筒出来然后通过③方辊震动整形输送,最后出来的包装袋保证能整齐、美观。
本码垛机器人通过对机械各部件模块和柔性化、程序和软件智能化的设计,可以实现一机器 人单流水线单剁型、一机器人多流水线多剁型等任意调整,纸箱包装、包装袋包装产品的随意
更换,而其货物大小、托盘位置和尺寸、码垛的剁型改变等参数可以通过触摸屏简单的操作设 置,机器人就可以自己计算出最佳码垛状态。
现对本款 SR210高速、重载型型号码垛机器人列出参数说明如下:
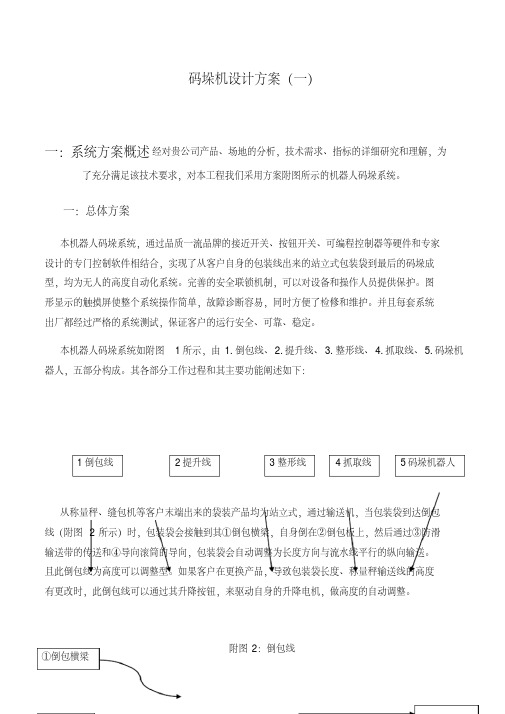
本机器人码垛系统如附图 1 所示,由 1. 倒包线、 2. 提升线、 3. 整形线、 4. 抓取线、 5. 码垛机 器人,五部分构成。其各部分工作过程和其主要功能阐述如下:
1 倒包线
2 提升线
3 整形线
4 抓取线
5 码垛机器人
从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包 线(附图 2 所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑 输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。 且此倒包线为高度可以调整型。如果客户在更换产品,导致包装袋长度、称量秤输送线的高度 有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。
THK THK 住友 1 住友 GOOGOL Pro-face JIAYINGDA
工业机器人码垛课程设计

工业机器人码垛课程设计一、课程目标知识目标:1. 学生能理解工业机器人的基本结构、工作原理及在物流码垛领域的应用。
2. 学生掌握工业机器人码垛的基本流程、编程方法和相关技术参数。
3. 学生了解工业机器人码垛技术的发展趋势及其在智能制造业的重要性。
技能目标:1. 学生能操作工业机器人进行简单的码垛任务,提高实际操作能力。
2. 学生能运用编程软件对工业机器人进行编程,实现不同码垛任务。
3. 学生具备分析工业机器人码垛过程中问题及解决方法的能力。
情感态度价值观目标:1. 学生培养对工业机器人及智能制造技术的兴趣,激发创新意识。
2. 学生树立正确的工程观念,认识到工业机器人在现代制造业中的价值。
3. 学生培养团队协作精神,提高沟通与交流能力,为将来从事相关领域工作打下基础。
课程性质:本课程为实践性较强的课程,结合理论知识与实践操作,让学生在实际操作中掌握工业机器人码垛的相关技能。
学生特点:高中生具备一定的物理知识和动手能力,对新鲜事物充满好奇,善于团队合作。
教学要求:结合学生特点,注重理论与实践相结合,强调实际操作能力的培养,提高学生的综合素养。
通过课程学习,使学生能够达到上述课程目标,为我国智能制造领域培养合格的技术人才。
二、教学内容本课程教学内容分为以下四个部分:1. 工业机器人基本原理- 介绍工业机器人的发展历程、分类及基本结构。
- 解析工业机器人的运动学原理和动力学特性。
- 分析工业机器人在制造业中的应用场景。
2. 码垛工艺及其编程- 讲解码垛工艺的基本流程、技术要求和操作规范。
- 介绍工业机器人码垛编程的基本方法、技巧和注意事项。
- 指导学生运用编程软件进行工业机器人码垛编程实践。
3. 工业机器人码垛操作与调试- 指导学生进行工业机器人码垛操作的基本步骤和技巧。
- 分析码垛过程中可能遇到的问题及解决方案。
- 实践操作:组织学生进行工业机器人码垛任务,提高操作熟练度和解决问题的能力。
4. 工业机器人码垛技术的发展趋势- 介绍国内外工业机器人码垛技术的发展现状和趋势。
ABB工业机器人码垛教学案例分析

·162·一、码垛过程概述ABB 工业机器人码垛教学案例,该教学案例的工作站以多种形状铝材物料码垛为例,利用IRB120搭载真空吸盘配合码垛工装套件实现对拾取物料块进行各种需求组合的码垛过程。
本教学案例中还通过RobotStudio 软件预置了动作效果,在此基础上实现I/O 配置、程序数据创建、目标点示教、程序编写及调试,最终完成物料码垛应用程序的编写。
码垛模型分为两部分:(1)码垛物料盛放平台(包含16块正方形物料、8块长方形物料),(2)码垛平台。
可采用吸盘夹具对码垛物料进行自由组合进行机器人码垛训练。
该教学案例可对码垛对象的码垛形状、码垛时的路径等进行自由规定,可按不同要求做出多种实训,练习对机器人码垛、阵列的理解并快速编程示教的应用技能。
(见图1)图1工艺要求:(1)在进行码垛轨迹示教时,吸盘夹具姿态保持与工件表面平行;(2)机器人运行轨迹要求平缓流畅,放置工件时平缓准确;(3)码放物料要求物料整齐,无明显缝隙、位置偏差等。
二、码垛操作过程(一)码垛工作站的控制流程(见图2)图2(二)程序编写码垛工作站程序由主程序(main)、初始化子程序(RIntiAll)、拾取工件子程序(RPick)、放置工件子程序(RPlace)、位置处理子程序(CallPos)、码垛计数值处理子程序(RPlaceRD)及位置示教子程序组成。
其中,拾取工件子程序和放置工件子程序在拾取和放置时调用位置处理子程序的拾取和放置位置结果,放置工件子程序还调用码垛计数值处理子程序实现工件码垛计数和判断码垛完成否。
位置示教子程序用于拾取基准点和放置基准点的示教,不被任何程序调用。
(三)主程序(R I n t i A l l 、R P i c k 、R P l a c e 、CallPos、RPlaceRD 等程序以实际教学过程讲解为主)PROC MAIN( )!主程序RIntiAll;!调用初始化程序,用于复位机器人位置、信号、数据等WHILE TRUE DO!利用WHILE TRUE DO 死循环,目的是将初始化程序与机器人反复运动程序隔离WaitDI di_Start,1;!等启动信号后执行RPick;!调用拾取工件程序RPlace;!调用放置工件程序ENDWHILEENDPROC图3(下转第164页)ABB 工业机器人码垛教学案例分析于建勇(新疆昌吉职业技术学院,新疆昌吉 831100)摘要:工业机器人是智能制造业最具代表性的装备,集加工精密化、柔性化、智能化、数字化等先进制造技术为一体。
毕业设计(论文)-四自由度码垛机器人控制系统设计[管理资料]
![毕业设计(论文)-四自由度码垛机器人控制系统设计[管理资料]](https://img.taocdn.com/s3/m/30791a358bd63186bdebbca9.png)
学士学位论文Shandong University Bachelor’s Thesis论文题目:四自由度码垛机器人控制系统设计姓名学号20061701027学院控制科学与工程学院专业自动化年级2006指导教师2010 年6月1日摘要作为物流自动化领域的一门新兴技术,近年来,码垛技术获得了飞速的发展。
码垛机器人以其高效、高精度、占地范围小等优势正在快速占领整个码垛行业。
特别是西方发达国家几乎完全替代了人工码垛。
从“七五”科技攻关开始,我国将工业机器人及应用工程作为研究开发重点之一,实现了中国机器人产业的“从无到有”。
然而,从整体上说我国的机器人产业还很薄弱,机器人的研究依然任重而道远。
本文就是立足于此,以具体工程实践为研究背景,进行四自由度码垛机器人控制系统的研究,以实现对码垛机器人的运动控制,满足生产实践需求。
论文的主要内容如下:1、在绪论中简要介绍了本论文的研究背景及意义。
2、通过分析机器人机械结构,获得机器人的几何模型,通过运动分析,得到运动变换关系式。
3、根据码垛控制需求,选择位置伺服控制,并进行相关MATLAB仿真。
4、以ACR9000多轴运动控制器和MT6100iV人机界面为核心控制器件进行相关系统硬件线路设计,共分为以下几个部分:相关器件选型、电气线路连接、控制器与伺服信号线路连接、触摸屏与控制器线路连接5、以ACR View和EB8000为开发工具,分别对下位机程序和人机界面进行开发。
其中下位机程序运用AcroBasic语言进行模块化编程以实现示教、回零、再现、手动运行、参数设置等功能。
上位机通过将相关控件与相应地址相链接实现对下位机的控制。
关键词:码垛机器人,控制系统,位置伺服控制,AcroBasic语言,模块化编程AbstractAs a new technology in logistics automation area, in recent years, stacking technology has experienced a rapid growth. With their high performance, high precision and small area advantages, stacking robots are quickly capturing the entire palletizing industry. Especially in the western developed countries, palletizing robots almost completely replaced the manual stack. Since the tackle hard-nut problems in science and technology during China's Seven Five year Plan period,Our country has made torch-plan projects and application of industrial robots as one of the key research and development has successfully realized robot industry "from nonexistence to pass into existence" plan. However, on the whole, our country's robot industry is still underdevelopment, robots' research is still a long way to go. This article talks about the control system of robot to realize motion control of the robot based on the engineering practice with specific background. Our purpose is to meet the industry requirement. Specific content of the article are as follows:1. The introduction of a brief background of this thesis and its significance.2. Through the analysis of the robot's physical construction, get a simplified geometric model ,and with kinematic analysis ,get transformation equation of the end effector.3. Choose the way of Servo-position Control to meet the need of the stack.4. Use ACR9000 controller and MT6100iV HMI as the core of control device to design the hardware system. This part is divided into the following several parts: related components selection, electrical wiring connections, the connection between controller and servo driver,controller and the HMI5. Using the development software of ACR View and EB 8000 to design the control program and interface of the HMI. The control program is designed by AcroBasic language. We can use the program to realize the function of teach, playback, back home, manual operation, parameters settings and so on. Besides, HMI control the controller by the connection of ActiveX with relevant BIT address.KEYWORDS :stacking robot,control system,servo-position control,AcroBasic language ,modular program目录第一章绪论 (1)研究背景 (1)国内外发展现状 (2)论文研究意义和目的 (2)本文主要研究内容 (3)本章小结 (3)第二章码垛机器人机械结构及其运动学分析 (4)码垛机器人的机械结构 (4)运动学分析 (5)本章小结 (7)第三章伺服控制方式选择及仿真 (8)伺服驱动系统要求 (8)AC伺服电机工作原理 (8)伺服控制方式选择 (9)位置伺服系统 (10)机器人MATLAB仿真 (11)本章小结 (13)第四章硬件控制系统设计 (14)硬件系统控制结构 (14)主要控制部件选型 (14)通信线路连接 (16)触摸屏与ACR9000的连接 (16)ACR9000与伺服驱动器之间的连接 (17)其它信号线路 (18)电气线路连接 (18)本章小结 (18)第五章软件系统设计 (19)下位机软件开发 (19)ACR View开发环境介绍 (19)系统参数配置流程 (19)AcroBasic语言及相关编程介绍 (33)软件编写流程 (35)典型程序介绍 (35)运动监视、调试 (37) (42)EB8000开发软件介绍 (42) (43)本章小结 (44)第六章系统测试 (45)结束语 (46)致谢 (48)参考文献 (49)附录 (50)附录1. 控制柜电气线路连接图 (50)附录2. 调试过程图片 (51)附录3. 成品实物图 (52)附录4. 下位机程序 (52)第一章绪论研究背景所谓码垛就是按照集成单元化思想,将一件件物料按照一定的模式堆码成垛,以便使单元化的物垛实现存储、搬运、装卸运输等物流活动[1]。
码垛机器人工作原理
码垛机器人工作原理随着科技工业自动化的进展,很多轻工业都相继通过自动化流水线作业.特别是食品工厂,后道包装机械作业使用一些成套设备不仅效率提高几十倍,生产成本也降低了。
看机器人每天自动对1000箱食品进行托盘处理,这些码垛机器人夜以继日地工作,从不要求增加工资。
这就是自动化技术的特点。
码垛机器人的工作原理是:平板上工件符合栈板要求的一层工件,平板及工件向前移动直至栈板垂直面。
上方挡料杆下降,另三方定位挡杆起动夹紧,如今平板复位。
各工件下降到栈板平面,栈板平面与平板底面相距10mm,栈板下降一个工件高度。
往复上述直到栈板堆码达到设定要求。
码垛机器人配备有特殊定制设计的多功能抓取器,不管包装箱尺寸或者重量如何,机器人都能够使用真空吸盘牢固地夹持与传送包装箱。
码垛机器人被广泛应用在医药行业、包装行业,仪表装配,继电器生产等众多行业。
本文先简介与其工作原理非常类似的直角坐标机器人,再介绍标准的码垛机器人及其应用案例。
直角坐标机器人直角坐标机器人的核心部件是直线运动单元(简称直线导轨),它是由精制铝型材、齿形带、直线运动滑轨与伺服电机等构成,作为运动框架与载体的精制铝型材,其截面形状均使用有限元分析法进行优化设计,从而进一步保证了其机械强度与直线度,滑动导轨系统是由轴承光杠与运动滑块构成,传动机构可根据不一致精度要求使用齿形带、齿条或者滚珠丝杠。
利用直线运动单元能够组合出各类多维机器人,按其结构形式有30多种二维与三维机器人,还能够在Z轴上加上一个到两个旋转轴,构成四维与五维机器人。
多维机器人按特定的组合构成完成特定功能的机器人或者机器人组合。
码垛机器人是最常见的一种,以形成多种标准形式的码垛机器人。
码垛机器人结构WSM系列码垛机器人要紧用来在自动化生产过程中执行工件的装载与卸载任务。
WSM系列码垛机器人使用三种标准托盘,其尺寸分别是300×400 mm、400×600 mm、600×800 mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D o i : 1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 0 7 ( 下) . 1 9
化 的先进 水平 。 所 谓 码 垛 就 是 按 照 集 成 单 元化 的 思 想 ,将 一
辅助
件 件 的 物 料 按 照 一 定 的 模 式 堆 码 成垛 , 以 便 使 单 元 化 的 物 料 实 现 搬 运 、 存 储 、 装 卸 、 运 输 等 物 流 活动 。近年 来 ,国内外码 垛 机器 人技 术 获得 了前 所 未 有 的发展 ,码 垛 机器 人 的吞 吐量 、柔性 、处理 速 度 以及抓 取 载荷 在不 断 的升 级 ,适 应场 合也 在 不断
[ 6 6 1 第3 5 卷 第7 期 2 0 1 3 — 0 7 ( 下)
I
Y
l l 5 0
訇 化
致末 端 运 动 的 不确 定 性 , 而 且 容 易 使 系统 产 生 振
动。
为 了 消 除 以上 影 响 , 我 们 取 连 杆 长 度 满 足 以 下 条件 :
( L c E -L A D ) + L c E =O
I -  ̄ D E
பைடு நூலகம்
( 3 )
B
2 0 O
^
取 图2 中参数 ,此时得 到F 点运动 方 程为
图2 臂 部结 构简图
1 f x : 1 6 2 0 + 6 . 7 5 x Y F = 1 1 5 0 _ 5 . 7 5 ) ,
务l
匐 出
码 垛机器人结构设计 与运 动分析
The st r uc t ur al desi gn and m ot i on anal ys i s o f pal l et i z i ng r obot
孙 浩 ,赵玉刚 ,姜文革 ,谷 萌
SUN Ha o, ZHAO Yu - g a n g, J I ANG We n - g e , GU Me n g
的扩大 口 , 2 】 。码 垛机 器人 以其 柔性 工作 能力 和 占地 面
图 1 码 垛 机 器 人 整 体 结 构 图
码 垛 机 器 人 的 工 作 过 程 要 求 实 现 高 速 、高 效 、稳 定 的 搬 运 和 码 垛 ,各 个 关 节 电机 必 须 严 格 按 照 自 己 的关 节 路 径 运 动 ,并 且 能 够协 调 准 确地 停 止 在 预 定 位 置 ,这 就 对 其 驱 动 方 式 和 传动 机 构
摘
( 山东理工大学 机 械工程学院 ,淄博 2 5 5 0 0 0 ) 要 :针对工业要求 ,设计了一台四 自由度并联码垛机器人 ,并提出一种新的计算 方法对其进行了主 体 结构 的数学计 算和运 动学分析 ,依据工 业现场要 求 ,规划码 垛运动轨 迹 ,最 后根据结 构分
析结果 利用m a t l a b 软件 对工作 空间模拟仿真 。结果表 明 ,所设 计机 器人完全满 足工业现 场的
长 期 、稳 定 的码垛 要 求 。新型 的码 垛机 器 人采 用并
2 机构运 动学分析
本 码 垛 机 器 人 主 体 结 构 采 用 类 平 衡 吊原 理 的
连 杆 机 构 ,该机 构 具 有 结构 简单 、维 护 方 便 、性 能稳 定 等优 点 H 】 。其 结构 简 图如 图 2 所 示 ,核 心 部
0 引言
码 垛 机 器 人 是 当 今 机 电 一 体 化 的 高 科 技 产 品 , 在现 代 企 业 物 流 管理 中 占有重 要地 位 , 它对 于 企 业提 高 生 产 效 率 、增 进 经济 效 益 、 保 证 产 品 质量 、 改 善 劳 动 环境 、优 化 作 业布 局 有 着 突 出 的 贡 献 ,其 应 用 的数 量 和 质 量 标 志 着企 业 生 产 自动
2 . 1机器人臂部运动求解
为 了 准 确地 对 执 行 末 端 进 行 分 析 求 解 ,便 于
系统对 电机 的控制 ,需要对机器人臂部进行运动
收稿 日期 : 2 0 1 3 - 0 1 - 2 6 作者简介: 孙浩 ( 1 9 8 8 一 ),男 ,山东淄博人 ,硕士研究生 ,研 究方 向机构创新与机器人技术 。
积 小 ,并 能 够 同时处 理 多种 物料 和垛 型 ,越 来越 受 到企 业 的青睐并 广泛 应用于 码垛 作业 中 。
的设计有较高要求。
1 码垛机器人结构设计
传 统 的码垛 机器 人 多采用 串联 机构 ,虽然 结构 简 单 ,控 制 方便 ,但是 由于 系统 刚性 差 ,难 以满足
( 4 )
分析 。笔者在前人研究推导的基础上【 ,提出了一
种简单直观的求解方法 。如图2 所示 ,在机器人大 小 臂组 合 旋 转 的 主 剖 面 内设 置 一个 固 定 的 坐 标 系 XoY,其 中 ,A点为 码垛 机器 人Y轴丝 杠 滑座 与 后 大 臂 的 铰 接 点 , 在 电 机 带 动 下 沿 Y轴 方 向垂 直 运
分为A BD、B C、D E、C E共 同组 成 的平 行 四连 杆 机 构 ,其 中A、C分 别 为垂 直 方 向跟 水 平 方 向驱 动
装置。
联 机构 ,不仅 刚性 强 ,控 制精度 也有 所提 高 。
本课 题 组设 计 码垛 机 器 人 的结 构 如 图 1 所示,
主 体 结 构 是 四边 形 的 连 杆 结 构 , 由4 个 自 由度 组 成 ,其 中 包括 2 个旋转副和2 个 移动 副 。机 器 人 的 执 行 末 端通 过 腰 部 的旋 转 运 动 ,前 大 臂 的水 平 运 动 ,后 大 臂 的垂 直 运 动 ,抓 手 的旋 转 运 动 相 互组 合 ,共 同完 成对物 品 的码垛 作 业 。