基于APIT的无线传感器网络质心算法研究
室内定位几种算法概述

室内定位几种算法概述一.室内定位目的和意义随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。
但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的定位技术目前还无法很好地利用。
因此,专家学者提出了许多室内定位技术解决方案,如A-GPS定位技术、超声波定位技术、蓝牙技术、红外线技术、射频识别技术、超宽带技术、无线局域网络、光跟踪定位技术,以及图像分析、信标定位、计算机视觉定位技术等等。
这些室内定位技术从总体上可归纳为几类,即GNSS技术(如伪卫星等),无线定位技术(无线通信信号、射频无线标签、超声波、光跟踪、无线传感器定位技术等),其它定位技术(计算机视觉、航位推算等),以及GNSS和无线定位组合的定位技术(A-GPS或A-GNSS)。
由于在室内环境下对于不同的建筑物而言,室内布置,材料结构,建筑物尺度的不同导致了信号的路径损耗很大,与此同时,建筑物的内在结构会引起信号的反射,绕射,折射和散射,形成多径现象,使得接收信号的幅度,相位和到达时间发生变化,造成信号的损失,定位的难度大。
虽然室内定位是定位技术的一种,和室外的无线定位技术相比有一定的共性,但是室内环境的复杂性和对定位精度和安全性的特殊要求,使得室内无线定位技术有着不同于普通定位系统的鲜明特点,而且这些特点是户外定位技术所不具备的。
因此,两者区域的标识和划分标准是不同的。
基于室内定位的诸多特点,室内定位技术和定位算法已成为各国科技工作者研究的热点。
如何提高定位精度仍将是今后研究的重点。
二. 室内定位技术的国内外发展趋势室内GPS定位技术GPS是目前应用最为广泛的定位技术。
当GPS接收机在室内工作时,由于信号受建筑物的影响而大大衰减,定位精度也很低,要想达到室外一样直接从卫星广播中提取导航数据和时间信息是不可能的。
第五章(支撑技术-节点定位)2014
5.1 概述
5.1.1 5.1.2 5.1.3 5.1.4 5.1.5 5.1.6 基本概念 基本术语 应用领域 定位算法分类 定位算法特点及要求 性能评价
5.1.1 基本概念
定义:无线传感器网络的定位问题一般指对于一组未知位置坐标的网 络节点,依靠有限的位置已知的锚节点,通过测量未知节点至其余节 点的距离或跳数,或者通过估计节点可能处于的区域范围,结合节点 间交换的信息和锚节点的已知位置,来确定每个节点的位置。 • 节点定位技术是无线传感网络的主要支撑技术之一。 • 节点定位问题即根据少数已知位置的节点,按照某种定位机制确定自 身的位置。 • 只有在节点自身正确定位之后,才能确定传感器节点监测到的事件的 具体位置,这需要监测到该事件的多个传感器节点之间相互协作,并 利用他们自身的定位机制确定事件发生的位置。 • 可以说,没有位置信息的数据往往是毫无意义的。 • 在传感器网络中,传感器节点自身的正确定位是提供监测事件位置信 息的前提。
• 在现实应用中,无线传感器网络的定位技术可以应用在许多重要的领 域,几乎包括所有无线传感器技术能够应用到的领域,包括传统应用 有军事,监控,应急,环境,防空等领域,新兴应用将涉及家用,企 业管理,保健,交通等领域。
5.1.4 定位算法分类
近年来出现了多种定位算法,在特定条件下,某些算法在某些性能指 标上可能优于其它算法,而在其它方面可能处于劣势。在一定意义下 ,具有普遍性的公认为最优秀的定位算法目前尚未产生。 尽管无线传感器网络自身定位系统和算法的分类还没有一个统一的标 准,也不一定适用于每一种定位系统和算法,但下面这些分类方法能 在一定程度上刻画不同定位技术的特点。
5.1.6 性能评价
(5)容错性和自适应性。通常,定位系统和算法都需要比较理想的无线通 信环境和可靠的网络节点设备。但在真实应用场合中常会有诸如以下 的问题:外界环境中存在严重的多径传播、衰减、非视距(non-lineof-sight,简称NLOS)、通信盲点等问题;网络节点由于周围环境或 自身原因(如电池耗尽、物理损伤)而出现失效的问题;外界影响和节 点硬件精度限制造成节点间点到点的距离或角度测量误差增大的问题。 由于环境、能耗和其他原因,物理地维护或替换传感器节点或使用其 他高精度的测量手段常常是十分困难或不可行的。因此,定位系统和 算法的软、硬件必须具有很强的容错性和自适应性,能够通过自动调 整或重构纠正错误、适应环境、减小各种误差的影响,以提高定位精 度。 (6)功耗。功耗是对WSN的设计和实现影响最大的因素之一。由于传感器 节点电池能量有限,因此在保证定位精度的前提下,与功耗密切相关 的定位所需的计算量、通信开销、存储开销、时间复杂性是一组关键 性指标。
一种自适应智能三边定位算法的设计与实现

一种自适应智能三边定位算法的设计与实现蓝威涛;张卫强;罗健宇【摘要】In order to effectively restrain the influence of indoor complex environment on the wireless sensor network nodes localization accuracy,and reduce the dependence of the indoor positioning system on the environment,a new adaptive intelligent trilateral localization algorithm is proposed.By measuring the fluctuation of the distance between the mobile node and the beacon nodes,the algorithm generates the corresponding adaptive factor.The variation factor controls the fine tuning of the distance radius in the trilateral localization algorithm,which makes the area of the overlapping part of the three positioning circles smaller than a certain precision.Then the maximum inscribed circle in the overlap region is plotted,and regards the center of the circle as the location of the mobile node.The simulation results show that the proposed algorithm has higher localization accuracy and better robustness than the weighted trilateral localization algorithm,and can adapt to different sizes and types of localization systems.%为了有效抑制室内复杂环境对无线传感器网络节点定位精度的影响,以及降低室内定位系统对环境的依赖性,提出了一种自适应智能三边定位算法.该算法通过测量移动节点与各信标节点的距离值的波动情况,生成相应的自适应因子.该变化因子控制三边定位算法中距离半径的微调量,使3个定位圆的重叠部分的面积小于一定的数量级,然后在重叠区域中作最大内接圆,将圆心作为移动节点的位置.仿真结果表明该算法比加权三边定位算法具有更高的定位精度,鲁棒性好,能适应不同规模和类型的定位系统.【期刊名称】《传感技术学报》【年(卷),期】2017(030)007【总页数】6页(P1089-1094)【关键词】无线传感器网络;三边定位算法;自适应因子;最大内接圆【作者】蓝威涛;张卫强;罗健宇【作者单位】宁波大学信息科学与工程学院,浙江宁波 315211;宁波大学信息科学与工程学院,浙江宁波 315211;宁波大学信息科学与工程学院,浙江宁波 315211【正文语种】中文【中图分类】TP301.6近年来,基于位置服务的应用在物联网、救援、监控、仓管等领域得到了快速的发展,人们对室内定位与导航的需求日益增大[1]。
RFID定位技术研究
GPS定位系统在进行室内定位时存在固有的定位精度问题,所以必须通过其他定位技术解决室内定位问题,如红外线、802.1l、超声波和RFID等等,这些系统各有优缺点。
其中RFID技术由于其非接触和非视距等优点已成为优选的定位技术,RFID系统可以在几毫秒内得到厘米级定位精度的信息,其传输范围很大,成本较低,因此备受关注。
RFID定位与跟踪系统主要利用电子标签对物体的唯一标识特性,依据读写器与安装在物体上的标签之间射频通信的信号强度(RSSI)或信号到达时间差(TDOA)来测量物品的空间位置,主要应用于GPS系统难以奏效的室内定位领域。
1.基于测距的RFID定位算法1.1 TOA1)原理: 通过获得发射机发射的信号到达目标再返回发射机的时间,由传播时间得出标签到阅读器的距离。
然后根据三边定位法或多边定位法解出目标标签的位置。
2)优点:定位精度高。
缺点:该算法要求标签和阅读器要同步,其次环境的复杂性会导致多径效应并降低系统的定位精度。
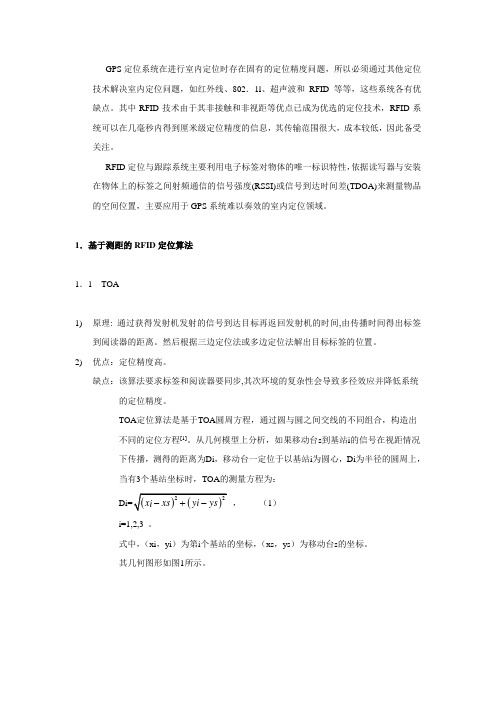
TOA定位算法是基于TOA圆周方程,通过圆与圆之间交线的不同组合,构造出不同的定位方程[1]。
从几何模型上分析,如果移动台s到基站i的信号在视距情况下传播,测得的距离为Di,移动台一定位于以基站i为圆心,Di为半径的圆周上,当有3个基站坐标时,TOA的测量方程为:,(1)i=1,2,3 。
式中,(xi,yi)为第i个基站的坐标,(xs,ys)为移动台s的坐标。
其几何图形如图1所示。
由(1)式得, ()()22111D x xs y ys =-+- (2) ()()22222D x xs y ys =-+- (3) ()()22333D x xs y ys =-+- (4) 由(2)-(3)可得相交线方程为,()()()()212112*22*21*11*11*12*22x x xs y y ys x x y y x x y y D D D D -+-=+-++-⎡⎤⎣⎦ (5) 同理,基站2基站3两圆交点的相交线方程为:()()()()323213*33*32*22*22*23*32x x xs y y ysx x y y x x y y D D D D -+-=+-++-⎡⎤⎣⎦ (6) 虽然可以用相同的方法得到基站1和基站3的相交线方程,但由于第3条交线同样会经过前2条交线的相同点,因此,只需求得3条交线其中2条的方程,便可联立解出交点坐标。
节点定位概述

传感器网络节点定位算法
基于测距的定位算法实现起来比较复杂,首先需要通过TOA、
TDOA、AOA、RSSI等常用的测距技术来测量各个未知节点到信标节 点的绝对距离值。
这个阶段也称为测距阶段。
测距结束后就要进行定位(计算坐标)阶段,即利用测距阶段所得的 节点间的距离或方位等参数来计算出未知节点的位置。
传感器网络节点定位算法
基于测距的定位算法 :
➢ 三边测量定位法(Trilateration) ➢ 多边定位法(Multilateration) ➢ 三角测量法(Triangulation) ➢ 极大似然估计法(Maximum Likelihood Method) ➢ 角度定位法(Goniometry)等
MDS-MAP定位算法是University of Missouri-Columbia的Yi Shang 等提出来的。
该算法属于集中式定位算法,它是利用节点间的连通信息通过 Dijkstra或Floyd算法生成节点间距矩阵,然后利用多维尺度分析技 术来获得节点间的位置信息。
这个多边形基本上确定了未知节点所在的区域并缩小了未知节点所在 的范围,最后计算这个多边形区域的质心,并将质心作为未知节点的 位置,这样就实现了未知节点的定位。
传感器网络节点定位算法
基于无需测距的定位算法——凸规划定位算法 (Convex Optimization)
➢ 凸规划定位算法的基本原理如图2-5所示
RFID与识别技术
概念描述
定位
➢ 即确定方位、确定某一事物在一定环境中的位置。 ➢ 在无线传感器网络中的定位具有两层意义:
• 其一是确定自己在系统中的位置。 • 其二是系统确定其目标在系统中的位置。
概念描述
在传感器网络的实际应用中:
基于三重修正的wsn节点定位方法

•信息科学•
基于三重修正的WSN节点定位方法
王枭,刘瑞敏,毛剑琳
(昆明理工大学信息工程与自动化学院,昆明650500)
摘要:由于无线传感器网络中需要对未知节点定位,但是传统定位方法存在定位精度低的 缺点。为了有效应对传感器网络定位误差较大的问题 ,该文提出一种基于三重修正的定 位算法。首先,给出了新的计跳机制计算公式;然后,结合质心定位算法来计算未知节点 的跳距;再利用最小二乘法对未知节点与锚节点间的距离矩阵进行修正;最后,利用高斯 牛顿法对未知节点与锚节点所组成的非线性方程组进行优化求解。另外,再通过Matlab 进行仿真实验,分析了不同因素对定位误差的影响。通过对比其他3种定位算法的定位 效果,验证了该文所提算法能够有效提高定位精度。 关键词:无线传感器网络;节点定位;三重修正;高斯牛顿法 中图分类号:TP393 DOI:10.16152/j. cnkX xdxbzr. 2019-06-009 开放科学(资源服务)标识码(OSID):
无线传感器网络是一种被部署在受控区域的 多跳自组织网络,它由大量的具有通信与感知能
力的传感器节点构成,在入侵检测、工业自动化、 智能建筑等众多领域有着极其广泛的应用[1"4] &
收稿日期:2019A3A3 基金项目:国家自然基金资助项目(61163051) 作者简介:王枭,男,山西大同人,从事无线传感器网络研究& 通讯作者:刘瑞敏,女,云南昆明人,副教授,从事无线通信研究&
本文在DV-HOP算法的基础上进行改进优 化,使得定位效果更佳。DV-HOP技术通过锚节 点与未知节点间的相互通信来获取每个未知节点 到锚节点的最小跳数值撚后,根据锚节点间的跳 数与距离,计算出锚节点的平均跳距,最后,未知 节点通过跳距计算出到锚节点距离,再根据某种 计算方法计算出未知节点的坐标。DV-HOP算法 由于其在实际环境定位中无需测距设备,可以大 大降低网络的成本,因此,在实际应用中具有独特 的优势。当dv-hop在大规模网络中被应用时, 它的关键问题是如何设计跳数机制、如何能有效 降低跳距的误差以及如何能较准确地求出未知节 点的定位算法。实际上,由于网络中未知节点的 数量多于锚节点数的原因,利用锚节点的跳距来 求锚节点与未知节点间的距离是造成距离误差的 一个因素;另外,由于锚节点间的跳数可能会存在 不是整跳数的情况,按照传统整数跳数机制就会 使得跳距出现偏差;最后,在定位算法中由于没有 对未知节点与锚节点间的距离进行误差校正而使 得定位效果较差。但是由于dv-hop定位精度 较低的缺点,使得许多研究人员致力于定位精度 优化算法的研究因此,国内外的研究学者们 纷纷对dv-hop算法做了不同的改进与优化。 赵雁航等⑺首先对跳距进行修正,然后,通过粒
于物联网空间划分的定位算法
0
引言
目前, 物联网技术已经广泛应用于环境 、 交通、 军事、 航
[1 ]
“在” “不在” 节点通过判断自己 还是 这些同心球体区域中, 最 终找到包含自己的最薄的一层球壳 。然后以不同的锚节点作 球心, 找到一系列这样的最薄的球壳 , 最后求取包裹区域的质 4] 心。文献[ 提出无线传感器网络三维自身定位方法 , 通过 3D, 该算法通过 改进 APIT 算法得到三维空间定位算法 APIT循环测试未知节点是处于由某 4 个节点所组成的四面体的内 部或外部, 筛选出所有可能的四面体 , 从而不断缩小未知节点 5]提出一种 的周边区域, 得到节点的空间位置估计 。 文献[ 基于弧心的分布式无线传感器网络节点定位算法 , 针对每个 未知节点, 基于传感器节点之间的通信约束关系 、 空间几何关 系和锚节点的已知位置信息 , 从而在几何学角度建立起包含 未知节点的圆弧区域, 将该圆弧区域的质心作为未知节点的 估计位置。 还有其他的一些 三 维 定 位 算 法 包 括 Landscape3D[6] 、Constrained3D、 三 维 距 离 向 量—跳 段 ( Threedimensional Distance VectorHop, 3DDVHop) [7] 等。 三维定位算法普遍存在的问题是为了追求一定的定位精 度导致计算量过大、 定位时间过长、 系统实时性大受限制, 而 且往往对网络密度要求高 , 系统能耗过大, 这些都大大限制了 三维定位算法的实用性 。 针对三维定位算法中的种种问题 , CLS, 提出一种基于空间网格思想的分布式三维定位算法 3D对 传 统 平 面 网 格 算 法 合 作 位 置 感 应 算 法 ( Cooperative , 而对于物联网中大多数应用来说 ,
Journal of Computer Applications 计算机应用,2012,32( 12) : 3517 - 3520 文章编号: 1001 - 9081 ( 2012 ) 12 - 3517 - 04
WSN定位技术
第6章 WSN定位技术
3.1物22 0理18'2定3''W位与符号定位
定位系统可提供两种类型的定位结果:物理位置和符号位置。例如,某个
节点位于经纬度,就是物理位置;而某个节点在建筑物的423号房间就是符号
位置。一定条件下,物理定位和符号定位可以相互转换。与物理定位相比,
符号定位更适于某些特定的应用场合,例如,在安装有无线烟火传感器网络
第6章 WSN定位技术
信标节点在网络节点中所占的比例很小,可以通过携带GPS定位设备等手 段获得自身的精确位置。信标节点是未知节点定位的参考点。除了信标节点 外,其他传感器节点就是未知节点,他们通过信标节点的位置信息来确定自 身位置。如图6-1所示的传感器网络中,M代表信标节点,s代表未知节点。S 节点通过与邻近M节点或已知得到信息的S节点之间的通信,根据一定的定位 算法计算出自身的位置。图6-1WSN中信标节点和未知节点在WSN的各种应用中, 监测到事件之后关心的一个重要问题就是该事件发生的位置。
第6章 WSN定位技术
(6)到达时间差(Time Difference of Arrival,TDOA):两种不同传 播速度的信号从一个节点传播到另一节点所需要的时间之差。
【国家自然科学基金】_节点自定位_基金支持热词逐年推荐_【万方软件创新助手】_20140731
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
科研热词 推荐指数 无线传感器网络 4 节点自定位 2 自定位 2 稀疏 2 相交环 2 定位 2 蒙特卡罗 1 节点定位 1 粒子群算法 1 移动无线传感器网络 1 混沌 1 水下无线传感器网络 1 水下兀线传感器网络 1 正交回归 1 扩展卡尔曼滤波 1 信标位置误差 1 仿真实验 1 不敏卡尔曼滤波 1 三维空间 1 三维定位 1 underwater wireless sensor network 1 sparse 1 self-localization 1 min-max 1 mds-map 1 lateration 1 intersect rings 1 dv-hop 1 cramér-rao界 1 aitken迭代 1
科研热词 无线传感器网络 节点定位 自定位算法 网格扫描 移动空间自定位 煤矿 正态分布 模糊聚类 延迟容忍网络 分布式无测距依赖定位 三边比例法 三角形重心扫描 ferry路由设计 apit
推荐指数 3 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11
科研热词 无线传感器网络 非测距 质心定位算法 节点定位 混合定位 测距 无线传感网络 定位 圆环 同心圆定位 rssi
推荐指数 2 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
2011年 科研热词 推荐指数 无线传感器网络 5 节点自定位 4 跳数 1 误差抑制 1 自定位 1 移动信标 1 水下无线传感器网络 1 最小二乘估计 1 最大似然 1 接收信号强度指示器(rssi) 1 已知位置数据库 1 定位算法 1 定位协议 1 声阵列 1 周期定位机制 1 加权 1 三维序列内心定位 1 ns2仿真 1 dv-hop 1 doa 1
【微电子学与计算机】_无线传感器_期刊发文热词逐年推荐_20140726
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
科研热词 无线传感器网络 能量均衡 蚁群算法 节点定位 生命周期 分簇 风车形状 非测距算法 阈值敏感 锚节点 量子 遗传算法 路由算法 质心定位算法 贝叶斯博弈 认证 覆盖率 覆盖增强 覆盖优化 节能 节点设计 自适应遗传算法 能量有效 能量密度 能耗均衡 置信距离 网络生命期 网络生命周期 网络拓扑 网格 综合数字滤波 系统架构 粒子群优化算法 粒子群 移动特性 移动无线传感器网络 移动式基站 移动代理 火灾探测 混沌理论 机会泛洪 有向感知模型 最小覆盖集 智能卡 早期火灾 无线多媒体传感器网络 无线传感器网 无线传感器 数据融合 数据精简算法 数据插值 按需路由
1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62
仿真 中间件 wsn tossim mac协议 lt码 dv-hop算法 dv-hop csdvh算法 cluster
1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
误差 , 结合近似三角形内点测试 ( PT 算法提 出了一种 新 的定位算 法 , 证未知节 点在 所选择信 标节点 A I) 保 组成 的三角形 内。算法不需额外 添加硬件 , 容易实现 。M t b环境 下仿 真结果显示 , 于 A I al a 基 PT的质心定 位算 法 在信 标 节点 较 为 稀疏 、 不均 时 , 定位 精度 比采 用 最 近邻 信标 节 点选 择 的质 心定 位算 法 提 高 了
的 几何 范 围 内 。为 解 决 这 一 问 题 , 里 采 用 A I 法 。 这 PT算 1 1 APT算 法 . I
∑W
=
∑ WX y
,: y 旦 一 . Y i W () 1
_ l一
W i
AI PT作为在节点定位技术 中应用 比较 成熟的技术 , 最 关键 的步骤是测试 目标物体在 3个节点所组成的三角形 内 部 还是外部。在 A I 法中信标节 点定时广播 自己 的坐 PT算 标信息 , 未知节点与邻居节 点相互交 换接 收到的信标 节点 定位信 号强度并 以此来判 断节点是否在信标节点组成 的三 角形内 , 从而估计 节点 可能位 于 的区域 。A I 法如 下 : PT算
3 1 2. 8% 。
关键词 :无线传感器网络 ; 质心算法 ; 近似三角形 内点测试
中图 分 类 号 :T 7 P33 文 献 标 识 码 :A 文 章 编 号 :10 - 77 2 1 )70 5 -3 0 09 8 (0 1 0_ 0 70 -
S ud n wi ee s s n o t r e t o d a g r t m s t y o r ls e s r ne wo ks c n r i l o ih
其 中, 为每个固定信标节点的权值 , 且权值 W 为
W =l d / . () 2
13 基 于 A I . PT的质 心 算 法
基于 A I PT的质 心 算 法 的 主 要 是 通 过 A I , 断 目标三角 形 内, 从而筛选 出对 定位产生影 响的三 角形 , 优化信 标节点对定 位 的作用 。假 设 未知节点 的通信半径 内分布着 n个信标节点 , 它们 的 坐标 为( , , 中, Y) 其 i: 12, , , … n为信标节点编号 。这 n 个 信标 节点可以划分为 个不 同的三角形 , 然后未知节点 通过 A I 各个 三角形 进行测 试 , PT对 判断 自身是 否在 三 角形内 , 若在三角形 内 , 判定 未知节 点在哪几 个三 角形 内, 若仅存在 于 一个 三 角 形 , 计算 出此 三 角形 的质 心 ( , 则 y) ,。若存在 于多个三 角形 , 选择 其 中一个 三角形 , 保证 其 顶点节点坐标到未知节 点坐标 的距离 和最小 , 以保证 能耗 最低 。从而计算 出该 三 角形 的质心 ( , 为未 知节 点坐 y)
方法 。如采用密度 自适应 H A E P算法通过在信标节点密 度
低 的区域增加信标节点来 提高定 位精度 ; 中心化场 强 去
加权多跳质心定位算法通过对单跳质心算法进行 多跳扩 展 以改善定位 比率 , 并加入场 强加权 过程 和去 中心 化: 以 过程 提高定位精度 。文献 [ ] 4 根据信标 节点对未 知节点 的不 同影响力确定加权 因子 , 以此来 提 高定位 精度 。文 献 [ ] 5
AA C中 。根 据 A I 法 来 确 定 未 知 节 点 位 于 某 3个 信 B PT算
标节点所组成 的三角形 中, 再进行质 心算 法 , 从而进一步提 高定位精度 。
4
基于 A I PT的质心算法具体步骤 为 : 1 信息收集 阶段 : ) 网络信 标节 点布撤 后 , 网络进 行初 始化配置 。信标节点首 先 向未知节点 广播消 息, 息中包 消 含信标节 点 自身在 网络 中的 I 坐标 , 了判 断节点 是否 D、 为
分布 , 以有效地 改进质 心算 法定位精度。
1 基 于 AP T的 质 心 算 法 研 究 I
质心算法是 以未知节点通信范 围内的所有信标节点作 为其几何质心来估算 位置 。在众 多对质 心算法 的改进 中 , 主要 通过对 不同信标节 点的加权 , 映 出信 标节点对 节点 反
提出将所有收集到 的来 自于 同一信标 节点 的 R S 值 做平 SI
( I AP T)
0 引 言
均, 作为未知节点接 收到此 固定信 标节点 的 R S 值 , 行 SI 进 定位计算从而 提高定位精度 。 以上改进 主要从两 方面进 行 , 一方 面主要从信 标节 点 分布角度来改进 算法 , 文献 [ 中通过 增加 信标 节点来 如 2]
提 高 定 位 精 度 。另 一 方 面 , 要 通 过 信 标 节 点 不 同 的 影 响 主
基于无线 传感 器网络 的高速公路 检测 系统 , 主要通 过 节点之间的通信 , 实现高速公路 的车辆定位 、 故快速报警 事
等 功 能 。在 系统 中 , 用 质 心 定 位 算 法 对 监 测 区 域 中 的 特 采
定 车 辆进 行 定 位 跟 踪 。
由 于质 心 算 法 对 信 标 节 点 的 密 度 和 分 布 有 很 大 的 要 求 , 时 , 没 有 反 映 出信 标 节 点 对 节 点 位 置 影 响 力 的 大 同 它 小 , 能 实 现 粗 粒 度 定 位 。 当 前 有 许 多 关 于 质 心 算 法 改 进 仅
收 稿 日期 :0 0 1— 1 2 1 — 1 1
位 置 的影 响力 , 很少 考虑到 信标 节点 的位置 。 实 际应 用 在
5 8
传 感 器 与 微 系 统
第3 O卷
中, 为节约通信能耗 , 当节点 密度较大 , 即未知节点 可通信 的信标节点个数较多时 , 只选择 最靠近 的 3个信标 节点进 行定位计算 。此时 , 即使 这些信标 节点都 在未知节 点 的一
标。
如果节点 Ⅳ存在一个邻居节点 , 并且该节点到信标节点 A,
B, C的距 离 全 部 大 于 或 全 部 小 于 Ⅳ 到 A, C 的 距 离 , B, 那 么, Ⅳ在 △A c外 ; 则 , 在 AA C 内。 图 1给 出 A I 日 否 Ⅳ B PT算
法 2种结果 , 图 1 a 中, 如 ( ) 目标物 体 Ⅳ通过 与邻居节 点 1 交换信息可知 , 自身运 动至节 点 1时 , 将远 离节点 B和 C , 但会接近节点 A, 与邻居节点 2 3, , 4的判断过程类 似 , 确定 自身位于 AA C内。而在图 1 b 中 , B ( ) 假定 目标物体 Ⅳ运动 至邻居 节点 2处 , 同时远离 节点 A, C, 将 B, 判断 自身 不在
它们之 间的内在关 系。距离未知节点距离远 的信标节点 的
权 重 大 , 之 , 重小 , 么 选 择 加 权 因子 能 够 体 现 各 个 信 反 权 这
标 节点对于未知节点 的决 定权 的大小 , 约束力 符合加权 其 质心算 法的要求。设 网络 中的 n个 固定信标 节点 , 信标节
Ma mi g5 5 0 Ch n o n 2 0 0, ia)
Abs r t I r e o o v o ain rordu o he e c n t ac : n o d r t s le l c t e r e t t b a o no s diti to r e e nd s a s n t e o de srbu in a e un v n a p re i h h g wa y tm a e n i h y s se b s d o W SNs A w lo ih usn . ne ag rt m i g API i tf r r o n ur h kn wn no e r T s pu o wa d t e s e t e un o d s a e wihi h ra g e ta o o e fs lce e c n no s Ths ag rt m o sno e d a d t a r t n t e tin l h tc mp s d o ee td b a o de . i lo ih d e tn e d ii lhadwa e, nd on r a e s o i e nt a y t mplme .Ma lb su l t n r s ls s w h tlc to r c so fc n r i o a in ag rt m s d n ta im ai e ut ho t a o a in p e iin o e tod lc to lo ih ba e o o API t a e tod ag rt m a e n be c n n d s b ae tneg bo h ie i r v d 3 T h n c nr i lo ih b s d o a o o e y ne r s ih rc oc mp o e 2.1 8% wh n b a o e ecn n de r p r e a d u e e o s a e s a s n n v n.
点 B 已知位置坐标 为( , , 中, ≤i , Y)其 1 ≤n 未知节 点 的估测位置坐标为( Y 。那么 , , ) 加权质 心计算公式为
侧, 由于密度较大 , 信标节点的几何 质心与未 知节 点的实际
坐标差距不大 , 但若信标节点较为稀疏 , 质心与实际坐标之 间的误差就非常 明显 。为此 , 在选择定位信标节点 时, 不能 只考虑最近节点 , 必须保证未 知节点 在所选信标 节点 组成
21 0 1年 第 3 0卷 第 7期