六自由度机器人结构设计
六自由度并联机器人简介

六自由度并联简介六自由度并联简介1、概述1.1 介绍六自由度并联是由六个自由度的运动链构成的系统。
它具有较大的工作空间和高精度的姿态控制能力,被广泛应用于工业自动化、医疗手术和科学研究等领域。
1.2 组成六自由度并联由底座、连杆链、末端执行器和控制系统组成。
底座是系统的基础部分,连杆链由六个连杆和连接它们的关节组成,末端执行器用于完成具体的任务,控制系统用来控制的运动和姿态。
1.3 工作原理六自由度并联通过控制各个关节的运动,实现末端执行器的多自由度运动。
它利用逆运动学和正运动学方法,根据所需的末端执行器位置和姿态计算各个关节的运动参数,从而实现所需的运动。
1.4 应用领域六自由度并联广泛应用于各个领域,包括工业自动化、医疗手术、科学研究等。
在工业自动化中,它可以用于装配、搬运和焊接等任务;在医疗手术中,它可以用于精确的手术操作;在科学研究中,它可以用于实验室操作和精密测量等。
1.5 优势和挑战六自由度并联具有较大的工作空间、高精度的姿态控制能力和多自由度的运动能力,能够完成复杂的任务。
然而,它也面临着运动学反解难题、运动参数优化和控制精度等挑战。
2、结构设计2.1 运动链设计六自由度并联的运动链设计需要考虑的工作空间、负载要求和运动学特性等因素。
运动链的设计通常采用刚性杆件和关节连接的方式,确保的刚性和稳定性。
2.2 关节设计关节是六自由度并联运动链中的重要组成部分,关节的设计需要考虑承载能力、转动范围和精度等因素。
通常采用电机和减速器组成的驱动系统来实现关节的运动控制,并配合传感器进行反馈控制。
2.3 连杆设计连杆是六自由度并联运动链中的连接部件,连杆的设计需要考虑刚性、轻量化和可靠性等要求。
通常采用高强度材料,采用优化设计和仿真分析等方法来提高连杆的性能。
2.4 末端执行器设计末端执行器是六自由度并联的最终工作部件,它根据具体任务的要求来设计。
末端执行器通常包括夹爪、工具或传感器等,可以完成抓取、加工和测量等任务。
六自由度机器人运动学分析
六自由度机器人运动学分析殷固密,王建生(五邑大学智能制造学部,广东江门529020)0引言随着中国制造2025和工业4.0的提出与发展,机器人在“机器换人”和提高社会生产力中扮演着不可或缺的重要位置。
为了使机器人平稳准确地完成指定任务,机器人的运动学分析是必不可少的。
其中,机器人运动学分析的基础就是D-H 参数建立和正逆运动学求解及验证。
通过基础分析,可以帮我们了解机器人的工作方法,揭示机构的合理运动方案和控制算法。
结合使用仿真软件的计算可视化,可以更直观地体现机器人的设计效果,及时发现缺点和不足并改正。
以库卡机器人KR16-2,一种末端三关节轴线相交于一点的六自由度工业机器人为研究对象,通过Craig 和Spong 两种不同的D-H 法则(全称Denavit-Hartenber)对该机器人机型进行运动学建模,推导出机器人正逆运动学模型,并利用MATLA 及Robotics Toolbox 进行运动学分析仿真验证。
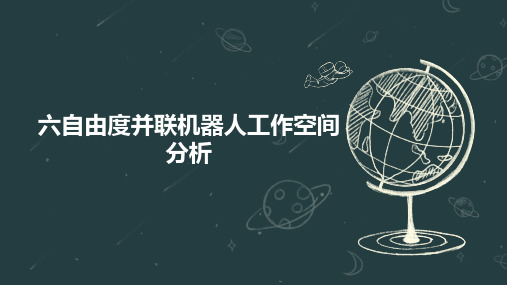
1机器人建模KR16-2机器人实物模型的基本结构及尺寸如图1所示。
1.1Craig 的D-H 方法建模Craig 的D-H 方法又称改进D-H 方法(简称MDH ),其建立各个关节参考坐标系为:以关节轴i 和i+1的交点或公垂线与i 轴的交点作为连杆坐标系{i }的原点;以关节轴i 轴的方向为坐标轴z i 的方向;以关节轴i 和i+1的公垂线方向为x i 方向,且指向指向关节轴i+1的方向;y i 根据右手直角坐标系螺旋法则确定,建立D-H 坐标系如图2所示。
根据建立的D-H 坐标系,得出各个关节的D-H 参数,如表1所示。
其中,连杆长度a i 为沿x i 轴从z i 移动到z i+1的距离;连杆扭角αi 为绕x i 轴从z i 旋转到z i +1的角度;连杆偏距d i 为沿z i 轴从x i -1移动到x i 的距离;连杆转角θi 为沿z i 轴从x i -1旋转到x i 的角度。
摘要:针对机器人不同运动学的建模方法,以KUKA机器人KR16-2为模型,分别采用Craig和Spong的D-H方法(全称Denavit-Hartenberg方法),建立D-H坐标系,建立机器人运动学模型,求解正逆运动学方程,并利用MATLAB中的Robotics Toolbox工具箱对机器人正逆运动学进行示教验证。
六自由度并联机器人工作空间分析
此外,数据分析还可以用于机器人的路径规划和碰撞检测等方面。例如,可以 通过分析机器人的运动学和动力学模型,优化机器人的路径规划算法,以实现 更高效和精确的自动化生产。同时,碰撞检测算法可以利用数据分析技术,检 测机器人与周围环境的碰撞风险,避免潜在的安全问题。
结论
本次演示对六自由度并联机器人工作空间分析进行了详细的探讨。通过综合考 虑几何约束和力约束,确定了工作空间的范围和特点。在此基础上,对自由度 进行了分析,并建立了相应的数学模型。最后,通过数据分析的方法进一步探 讨了机器人的运动学和动力学特性。这些知识对于实际应用和未来的研究具有 重要意义。
对于三自由度Delta并联机器人,其逆向运动学的求解相对复杂。一般需要通 过几何关系和代数运算来求解,且求解过程中需注意各关节变量的约束条件。 正向运动学则相对简单,可以通过机器人各关节的位移、速度、加速度等参数 进行计算。
Delta并联机器人的工作空间求 解
工作空间是Delta并联机器人在作业过程中,末端执行器可以达到的空间位置 集合。求解Delta并联机器人的工作空间,主要是通过逆向运动学的方法,将 末端执行器置于一系列不同的位置和姿态,然后通过正向运动学的方法求解出 每个位置和姿态下机器人各关节的状态,进而获得机器人的工作空间。
谢谢观看
2、高速度和高精度:由于机器人的结构简单,没有串联机器人的中间关节, 因此可以以更高的速度进行运动。由于机器人的结构刚性高,可以以更高的精 度进行运动。
3、负载能力强:由于机器人的连杆数量较多,每个连杆都具有较高的承载能 力,因此可以承受较大的负载。
4、结构紧凑:由于机器人的结构紧凑,可以节省空间,使得机器人在有限的 空间内工作。
5、稳定性好:由于机器人的结构简单,没有复杂的中间关节,因此具有更好 的稳定性,可以在恶劣的环境下工作。
UR06六自由度工业机器人说明书

(3)搬运任务
工作对象:笨重物品;
工作任务:定点搬运;
要求:定位精度要求高,对其承载能力和定位精度有较高要求。
工作对象:轻巧物品;
工作任务:定点搬运;
要求:轻拿轻放且定位精度要求高,对机器人的速度稳定和定位精度有较高要求。
学生姓名:
Ⅰ 毕业设计(论文)题目
中文:UR-06六自由度工业机器人设计
英文:UR-06 Six Degrees Freedom of Industrial Robot
Ⅱ 原始资料
1.设计要求一份
2.三维软件一套;
3.相关文献资料若干。
Ⅲ 毕业设计(论文)任务内容
1、课题研究的意义
通过对家用机器人机构设计,希望学生熟悉机电一体化系统的设计过程,以及掌握利用AUTO CAD或UG来绘制二维图形或创建三维实体的能力。毕业设计环节是教学计划中综合性最强的实践教学环节,对培养学生的思想、工作作风及实际能力、提高毕业生全面素质具有很重要的意义。同时,对所学知识的全面总结和综合应用,又为今后走向社会的实际操作应用铸就了一个良好的开端
对人的研究,国外侧重于对人行走时的步态分析,通过对人脚形状的分析,得出具有圆形截面的脚趾和脚后跟以及具有扁平截面的连接脚趾和脚后跟的中间部分具有最佳的动力学性能。
对动物的研究则表现为对诸如蛇、鱼的结构以及运动性能的研究。仿蛇机器人不仅可以作为管道检测装置也可以作为地震或矿难探索装置,更可以当作极地探测器来进行科研活动。
本次设计完成的主要内容是UR-06六自由度工业机器人结构设计,以及初步运动仿真。在设计过程中,我初步参考了实验室机器人的结构设计理念,后经过老师提供现实产品的结构参考,完善焊、点焊、装配、搬运、喷漆、检测、码垛、研磨抛光和激光加工等复杂作业,其各种优异的功能使其在现代工业生产中更是具有及其重要的地位。
六自由度焊接机器人设计论文_本科论文
1前言1.1设计背景与意义1.1.1 焊接机器人概述焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。
为了适应不同的用途,工业机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。
焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
自从世界上第一台工业机器人UNIMATE于1959年在美国诞生以来,机器人的应用和技术发展经历了三个阶段:示教再现型机器人、具有感知能力的机器人、智能型机器人。
1.1.2 焊接机器人国内外研究现状(1)国外研究现状自从世界上第一台工业机器人UNIMATE于1959年在美国诞生以来,机器人在工业发达国家得到了迅速发展。
其中日本具有机器人王国之称,此外,世界上还有许多工业发达国家,如美国、前苏联等一些国家的机器人产业也发展得很快。
在亚洲,韩国的机器人产业发展也很迅速,现排名世界前列。
现在国外的机器人各个方面的技术发展现状为,在机械结构上以发展关节型机器人为主流,在控制系统方面主要是发展基于PC的开放结构的控制系统,在驱动技术方面主要是发展 AC伺服驱动技术,此外智能化传感器技术的机器人数量呈上升趋势。
焊接机器人技术正朝着高速、高精度、多功能化方向发展。
(2)国内研究现状我国的工业机器人技术经过三十多年的发展,现在已掌握了机器人的设计制造技术、控制系统的硬件和软件设计技术、运动学和轨迹规划技术,开发出了弧焊、点焊、装配等机器人;现阶段我国焊接机器人的应用主要集中在汽车、摩托车、工程机械、铁路机车等主要行业。
其中弧焊机器人已广泛应用于各大汽车制造厂的自动焊装线上。
但从总体上来看,我国的工业机器人技术及其工程上的应用水平和国外相比起来还有一定的差距。
现阶段我国工业机器人技术主题发展战略目标是:根据2l世纪初,我国国民经济对先进制造及自动化技术的需求,瞄准国际前沿高新技术发展方向,创新性地进行研究和开发工业机器人技术领域的基础技术、关键技术,产品技术和系统技术。
六自由度机器人

VME运动控制器六自由度机器人概 述六自由度机器人是一种典型的工业机器人,在自动搬运、装配、焊接、喷涂等工业现场中有广泛的应用。
固高科技GRB 系列六自由度机器人是固高成熟完备的运动控制技术与先进的设计和教学理念有机结合的产物,既满足工业现场要求,也是教学、科研机构进行运动规划和编程系统设计的理想对象。
该机器人采用六关节串联结构,各个关节以“绝对编码器电机+精密谐波减速器”为传动。
在小臂处留有安装摄像头、气动工具等外部设备的接口,并提供备用电气接口,方便用户进行功能扩展。
机器人的控制方面,采用集成了PC 技术、图像技术、逻辑控制及专业运动控制技术的VME 运动控制器,性能可靠稳定,高速高精度。
主要特点开放式控制实验平台z 基于VME 总线高性能工业运动控制器的开放式平台,支持用户自主开发; z 通用智能运动控制开发平台,采用VC++或OtoStudio 计算机可编程自动化控制系统开发工具z 配备图形示教功能,便于机器人的编程操作和应用培训; z 配套内容详尽的操作手册和学生实验指导书,通过实例演示,引导用户操作并学习如何基于运动控制器开发各种应用软件系统。
工业化设计与制造z 按照工业标准设计和制造;z 机构设计成6轴串联旋转式关节,各关节采用绝对型编码盘交流伺服电机驱动,谐波减速器传动;z 模块化结构,简单、紧凑,预留电气与气动标准接口;z 较高的负载、更快的轴动作速度、大的许用扭矩和转动惯量使机器人应用广泛,可用于搬运,点焊,装配,点胶,切割,喷涂等行业;z 具备最大的工作半径和最小的干涉半径,工作范围大,在系统设计上提供较大的灵活性,夹具、剪丝机等设备可以采用更高效的安装方式;控制软件采用VC++开发的控制系统采用OtoStudio开发的控制系统基于OtoStudio软件环境开发的六自由度机器人接口界面OtoStudio是固高科技开发的计算机可编程自动化系统开发平台。
它支持完整版本的IEC61131标准的编程环境,支持标准的六种编程语言,是一个标准的软件平台,被很多硬件厂家支持,除了支持PLC编程,还支持总线接口、驱动设备(特别是伺服、数控)、显示设备、IO设备等的编程。
6关节机器人介绍剖析
6关节机器人介绍剖析六关节机器人,也称为六轴机器人,是一种具有六个自由度的机器人系统。
每个关节都能够进行旋转,这使得机器人能够在三维空间中执行各种复杂的任务和动作。
下面我将对六关节机器人的结构、工作原理、应用领域以及优势进行介绍和剖析。
六关节机器人的结构主要由六个旋转关节组成,每个关节由电机驱动,通过齿轮传动或者其他传动方式将旋转运动传递到机械臂的末端。
这种结构使得机器人能够沿着不同的轴进行灵活的运动,实现各种复杂的动作。
同时,机器人的末端还可以配备各种工具或器械,从而可以在不同的领域中执行不同的任务。
六关节机器人的工作原理主要是通过控制每个关节的旋转角度,从而实现机械臂的整体运动。
通常采用的控制方式有PID控制、模糊控制、神经网络控制等。
通过计算机的精确控制,可以使机器人按照预先设定的路径或者姿态完成任务。
六关节机器人在各个领域都有广泛的应用。
在制造业中,它们可以完成各种组装、装卸、搬运、焊接等工作。
在医疗领域,它们可以辅助进行手术操作、康复训练等。
在军事领域,它们可以用于侦查、拆弹、装甲车维修等任务。
此外,它们还可以应用于航空航天、矿山、化工、食品加工等行业,为人们提供更安全、高效、精确的服务。
六关节机器人相比其他机器人系统具有一些独特的优势。
首先,六关节机器人具有较大的工作范围和灵活性,能够执行复杂的动作和路径规划。
其次,这种机器人的运动轨迹较为精准,可以实现高精度的定位和操作。
此外,六关节机器人在力矩和负载方面也具有较大的承载能力,可以应对不同的工作环境和工作负荷。
然而,六关节机器人也存在一些挑战和不足之处。
首先,它们通常需要较大的空间,并且布置和配置相对较为复杂。
其次,其运动控制需要较高的控制精度和计算能力,对控制系统提出了较高的要求。
此外,由于六关节机器人的结构较为复杂,对维护和保养也提出了较高的要求。
综上所述,六关节机器人是一种具有六个自由度的机器人系统,由六个旋转关节组成。
它们在制造业、医疗、军事等领域具有广泛的应用。
六自由度机器人总结
2.3 安全限位设计
PMAC为每个电机提供了两个输入作为行程 开关控制。在电机运行时它们必须为低电平以允 许电机移动。
+5V
R1 220
D1
T1 R2
100
TP805
PMAC限位信号 T2
Thanks for your attention!
然后进入规则PID调节,手动PID Interactive tuning
首先更改Ix30(Kp)加快系统的快速性
其次更改Ix33(Ki)使系统无静差
最后调节Ix31(Kd)改善系统的阻尼,但更改幅度不 要太大,以免闭环时电机严重震荡,参数更改应时 结合系统在阶跃模式下的曲线响应修改
输入闭环命令J+/J-使电机正/反转,输入J/使电机停 止。
&1
设置坐标系
#1->X
将1号电机设为X轴
i100=1 1号电机使能
i125=$2C000 软件设置限位无效
O10 开环输出I169中设置值得10%
PEWIN的编码器位置窗口应有脉冲反馈信息, 此时必须确定伺服反馈与输出极性匹配。
如果在指令电压为0时,电机还可能低速运 转,调节零漂功能纠正零漂(驱动器的Pr52参数 和PMAC的Ix29) 。
给定位置
-
PMAC
速度模拟量
位置控制器 输出
-
伺服放大器
电流
位置反馈
速度反馈
光电编码器
伺服控制原理图
位置闭环由PMAC运动控制卡来完成,PMAC 对于位置闭环采取了PID控制的方式,位置环的参 数可以通过PMAC的I变量来调节,根据系统的不 同伺服要求可在一定范围内由用户设定。
位置控制器位置反馈给定位置速度模拟量输出伺服放大器速度反馈电流反馈pmac光电编码器伺服控制原理图速度调节器电流调节器电流2调试过程总结硬件安装接口及接线连结检查e跳线软件设置和定义1pmac与上位机通讯pcomm322各变量的设置定义系统编程1坐标系定义2设计程序结构运动plcs编写和调试用户程序pid参数设定系统调试上位软件开发链接库控件hmi开发21主要参数设置驱动器与pmac之间必须经过适当的设置才能在给定的系统下正常工作
压电驱动三支链六自由度微动机器人机构设计
第 2 卷第 3 9 期
20 年6 0 7 月
压
电
与
声
光
Vo | 9 No 3 l2 .
PE I ZOELE CTE CTRI S & ACOUS ) TI C T(OP CSΒιβλιοθήκη Jn 0 7 u .2 0
文章 编 号 :0 42 7 (0 70 —2 60 1 0—4 4 2 0 ) 30 7 —4
Ke r s p r l l c o n p lt r iz e e ti c u t r ;fe u e hn e y wo d : a al e mi r ma i u a o ;pe o l c rca t a o s l x r i g s
S r c u e De i n o r e lm b d 6 DOF i r m a i u a o i e y t u t r sg f Th e —i e - M co n p l t r Dr v n b Pi z e e t i t a o s e 0 l c rc Ac u t r
动 机 器 人 结 构 。采 用 整 体 式 下 平 台和 3 两 端 带有 柔性 球 铰 链 和 单 轴 直 圆柔 性 铰 链 的支 杆 , 结 构 紧 凑 并 有 利 于 条 使
提 高 精 度 。在 分 析 逆 解 的基 础 上 , 据 工 作 空 间要 求 设 计 了 整 体 尺 寸 。根 据 柔 性 铰 链 选 取 原 则 , 直 角 平 板 和 支 根 对
压 电驱 动 三 支 链 六 自 由度 微 动 机 器 人 机 构 设 计
荣伟彬 , 乐锋 , 立宁, 王 孙 矫 杰
( 尔滨 工 业 大 学 机 器 人 研 究 所 , 龙 江 哈 尔滨 10 0 ) 哈 黑 5 0 1
六自由度串联机器人结构设计及有限元分析优化
心 ,但不规则形状增 加 了精 加工 时定位 装夹 的麻烦 。 另外 ,相连两轴 的电机往往安装于 同一轴部 的主体零 件上 ,使得各零部件装配及维修不方便 ,且整个机器 人可重构性降低 。
为 了克服现有技术存在 的不足 ,作者设计一种六 自由度 串联工业机器人机械结构 ,包括传 动方案 的确 定 ,电机 、减速器 的选型 ,各关节部件 的基体及其他 零件 的设计 。并将设计好 的机械结构模型导入有 限元 分析软件进行 了静态分析 和模态分 析 ,进 而对模 型结 构进行 了优化 ,为机 器人 的控制 提供 优 良的硬 件基 础H 。经优化设计 ,该机器人各零部件加工及安装方 便 ,结构稳 固 ,并具备较高 的机械可重构性 。 1 机 器人 结构 设计 1.1 六 自由度 串联机 器人 机 构原理
K eyw ords:Industrial robot; Design of structure; Finite element analysis
工业机器人是集 机械 、电子 、控制 、计算机 、传 感器 、人工智能等 多学科 先进技术于一体 的现代制造 业重要 的 自动化装 备…。发展机器人产业对提高一 国 制造业 的 国际竞 争力 具 有重 要 战 略意 义。近 二 十年 来 ,机器人技术发展非 常迅速 ,各种用途的机器人在 各个领域广泛获得应 用 。
当前世界 主流 的工业 机器人 以四、五 、六 自由度 串联型和并联 型机器人 为主。其 中,六 自由度 串联工 业机器人各关节 主体零件 大多采 用 复杂形状 大铸 件 , 其余零件小而多 。一体式 的主体 零件增强 了部件乃至 整机 的刚度 ,并 且 以铸 造成 形 优化 了工 件 质量 与 重
2013年 12月 第 41卷 第 23期
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六自由度机器人结构设计、 运动学分析及仿真 学 科:机电一体化 姓 名: 袁杰 指导老师:鹿毅 答辩日期: 2012.6 摘要 近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此 研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义 的。 典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在 生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合项 目的要求,设计了一种小型的、固定在AGV 上以实现移动的六自由度串联机器人。 首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择 其中最优的方案进行了结构设计;同时进行了运动学分析,用D-H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析,作出了实际工作空间的轴剖面。这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。最后用ADAMS 软件进行了机器人手臂的运动学仿 真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了 经验。 第1 章绪论 1.1 我国机器人研究现状 机器人是一种能够进行编程,并在自动控制下执行某种操作或移动 作业任务的机械装置。 机器人技术综合了机械工程、电子工程、计算机技术、自动控制及 人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表,是当代科技发展最活跃的领域。机器人的研究、制造和应用正受到越来越多的国家的重视。近十几年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。 我国是从 20 世纪80 年代开始涉足机器人领域的研究和应用的。1986年,我国开展了“七五”机器人攻关计划。1987 年,我国的“863”计划将机器人方面的研究列入其中。目前,我国从事机器人的应用开发的主要是高校和有关科研院所。最初我国在机器人技术方面的主要目的是跟踪国际先进的机器人技术,随后,我国在机器人技术及其应用方面取得了很大成就。主要研究成果有:哈尔滨工业大学研制的两足步行机器人,北京自动化研究所1993 年研制的喷涂机器人,1995 年完成的高压水切割机器人,国家开放实验和研究单位沈阳自动化研究所研制的有缆深潜300m 机器人,无缆深潜机器人,遥控移动作业机器人,2000 年国防科技大学研制的两足类人机器人,北京航空航天大学研制的三指灵巧手,华理工大学研制的点焊、弧焊机器人,以及各种机器人装配系统等。 我国目前拥有机器人 4000 台左右,主要在工业发达地区应用,而全 世界应用机器人数量为83 万台,其中主要集中在美国、日本等工业发达国家。在机器人研究方面,我国与发达国家还有一定差距。 1.2 工业机器人概述: 在工业领域广泛应用着工业机器人。工业机器人一般指在工厂车间 环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。工业机器人的定义为:“一种自动定位控制、可重复编程的、多功能的、多自由度的操作机。能搬运材料、零件或操持工具,用以完成各种作业。” 操作机定义为:“具有和人的手臂相似的动作功能,可在空间抓放物 体或进行其它操作的机械装置。” 一个典型的机器人系统由本体、关节伺服驱动系统、计算机控制系 统、传感系统、通讯接口等几部分组成。一般多自由度串联机器人具有4~6 个自由度,其中2~3 个自由度决定了末端执行器在空间的位置,其余2~3 个自由度决定了末端执行器在空间的姿态。 1.3 研究课题的提出 本研究课题是根据省教育厅《物流机器人操作研究与开发》课题的 需要而提出的。工业机器人在FMS 中的一种典型应用如图1-1 所示。
图 1-1 工业机器人的一种典型应用 工业机器人固定在机床或加工中心旁边,由它们完成对加工工件的 上、下料和装夹作业,通过输送线运送工件,实现物流的运转。当所要加工的产品放生变化、工件工艺流程改变时,就要调整柔性制造系统的布局。现在设想,将工业机器人固定在自动引导车(AGV)上,改变自动引导车的轨迹,就可以适应工件和工件工艺流程的变化,大大提高加工系统的柔性。 设想的机器人工作方式如图 1-2 所示 图 1-2 可移动式机器人的应用 此外,对于这类小型的机器人,在原理不变的情况下,改变其结构, 增强人机功能,将它固定在小型的移动装置或直接与移动装置结合成一体,就可以应用到日常生活中,如生活中物体的搬运、人员的看护等。 因此,设计开发这样一种可移动式、多自由度的小型机器人是有实 际意义的。 1.4 本论文研究的主要内容 作者系统学习了机器人技术的知识,查阅了大量的文献资料,对国 内外机器人、主要是工业机器人的现状有了比较详细的了解。在此基础 上,结合作者本人的设想,和设计工作中需要解决的任务,主要进行以 下几项工作: (1) 进行机器人本体结构的方案创成、分析和设计。 (2) 进行机器人静力学学分析, (3) 分析机器人操作臂的工作空间,根据分析结果对操作臂各个杆 件的长度进行选择和确定。 第2 章 机器人方案的创成和机械结构的设计 2.1 机器人机械设计的特点 串联机器人机械设计与一般的机械设计相比,有很多不同之处。首 先,从机构学的角度来看,机器人的结构是由一系列连杆通过旋转关节(或移动关节)连接起来的开式运动链。开链结构使得机器人的运动分析和静力分析复杂,两相邻杆件坐标系之间的位姿关系、末端执行器的位姿与各关节变量之间的关系、末端执行器的受力和各关节驱动力矩(或力)之间的关系等,都不是一般机构分析方法能解决得了的,需要建立一套针对空间开链机构的运动学、静力学方法。末端执行器的位置、速度、加速度和各个关节驱动力矩之间的关系是动力学分析的主要内容,在手臂开链结构中,每个关节的运动受到其它关节运动的影响,作用在每个关节上的重力负载和惯性负载随手臂位姿变化而变化,在高速情况下,还存在哥氏力和离心力的影响。因此,机器人是一个多输入多输出的、非线性、强耦合、位置时变的动力学系统,动力学分析十分复杂,因此,即使通过一定的简化,也需要使用不同于一般机构分析的专门分析方法。 其次,由于开链机构相当于一系列悬臂杆件串联在一起,机械误差 和弹性变形的累积使机器人的刚度和精度大受影响。因此在进行机器人机械设计时特别要注意刚度和精度设计。 再次,机器人是典型的机电一体化产品,在进行结构设计时必须要 考虑到驱动、控制等方面的问题,这和一般的机械产品设计是不同的。 另外,与一般机械产品相比,机器人的机械设计在结构的紧凑性、 灵巧性方面有更高的要求。 2.2 与机器人有关的概念 以下是本文中涉及到的一些与机器人技术有关的概念。 1 自由度:工业机器人一般都为多关节的空间机构,其运动副通常 有移动副和转动副两种。相应地,以转动副相连的关节称为转动关节。 以移动副相连的关节称为移动关节。在这些关节中,单独驱动的关节称 为主动关节。主动关节的数目称为机器人的自由度。 2 机器人的分类 机器人分类方法有多种。 (1) 按机器人的控制方法的不同,可分为点位控制型(PTP),连续 轨迹控制型(CP):(a)点位控制型(Point to Point Control ):机器人受控运动方式为自一个点位目标向另一个点位目标移动,只在目标点上完成操作。例如 机器人在进行点焊时的轨迹控制。 (b)连续轨迹控制型(Continuous Path Control ):机器人各关节同时做受控运动,使机器人末端执行器按预期轨迹和速度运动,为此各关节控制系统需要获得驱动机的角位移和角速度信号,如机器人进行焊缝为曲线的弧焊作业时的轨迹控制。 (2) 按机器人的结构分类,可分为四类: (a)直角坐标型:该型机器人前三个关节为移动关节,运动方向垂 直,其控制方案与数控机床类似,各关节之间没有耦合,不会产生奇异 状态,刚性好、精度高。缺点是占地面积大、工作空间小。 (b)圆柱坐标型:该型机器人前三个关节为两个移动关节和一个转 动关节,以q, r, z为坐标,位置函数为P = f (q, r, z) ,其中,r 是手臂径向长度,z 是垂直方向的位移,q 是手臂绕垂直轴的角位移。这种形式的机器人占用空间小,结构简单。 (c)球坐标型:具有两个转动关节和一个移动关节。以q,f, y 为坐 标,位置函数为P = f (q ,f, y),该型机器人的优点是灵活性好,占地面积小,但刚度、精度较差。 (d)关节坐标型:有垂直关节型和水平关节型(SCARA 型)机器 人。前三个关节都是回转关节,特点是动作灵活,工作空间大、占地面积小,缺点是刚度和精度较差。 (3) 按驱动方式分类: 按驱动方式可分为:(a)气压驱动;(b)液压驱动;(c)电气驱动。 电气驱动是 20 世纪90 年代后机器人系统应用最多的驱动方式。它 有结构简单、易于控制、使用方便、运动精度高、驱动效率高、不污染 环境等优点。 (4) 按用途分类: 可分为搬运机器人、喷涂机器人、焊接机器人、装配机器人、切削