准坐标形式的非完整刚体系统动力学方程及数值模拟
拉格朗日乘数 多体系统动力学方程

拉格朗日乘数是多体系统动力学方程中的一个重要概念。
在多体系统中,由于各个体之间存在相互作用,系统的动力学方程往往较为复杂。
而拉格朗日乘数提供了一种有效的方法,可以简化多体系统的动力学方程,使得系统的运动规律更易于理解和分析。
一、拉格朗日乘数的基本概念在多体系统中,每个质点都受到各种力的作用,这些力之间存在一定的约束关系,刚性约束、非完整约束等。
而拉格朗日乘数就是用来处理这些约束的。
1. 拉格朗日函数在多体系统中,可以引入拉格朗日函数来描述系统的运动。
拉格朗日函数通常写成L = T - V,其中T代表系统的动能,V代表系统的势能。
通过对拉格朗日函数对时间的导数进行极值运算,可以得到系统的运动方程。
2. 约束条件在多体系统中,各个质点之间通常存在各种约束条件,例如质点之间的距离固定、速度之和为零等。
这些约束条件可以用方程的形式表示出来,并且可以通过引入拉格朗日乘数来处理。
二、拉格朗日乘数的应用拉格朗日乘数主要用来处理约束条件下的极值问题。
通过引入拉格朗日乘数,可以将含有约束条件的问题转化为不含约束条件的问题,从而使得问题的求解变得更加简单和直观。
1. 等式约束当系统中存在等式约束时,可以引入拉格朗日乘数来处理。
设系统的约束条件为g(x) = 0,其中x为系统的广义坐标。
引入拉格朗日乘数λ,可以构造拉格朗日函数L = f(x) + λg(x),然后通过对拉格朗日函数对x和λ的偏导数进行极值运算,可以得到系统的运动方程。
2. 不等式约束当系统中存在不等式约束时,同样可以引入拉格朗日乘数来处理。
设系统的约束条件为g(x) ≥ 0,引入拉格朗日乘数λ,可以构造拉格朗日函数L = f(x) + λg(x),然后通过对拉格朗日函数对x和λ的偏导数进行极值运算,同样可以得到系统的运动方程。
三、案例分析以下通过一个简单的例子来说明拉格朗日乘数的应用。
考虑一个质点在xoy平面上沿着一条曲线运动。
假设曲线的方程为y= x^2,且质点到原点的距离为1。
(完整版)动力学建模方法与解法总结

目录1 刚体系统 (1)2 弹性系统动力学 (6)3 高速旋转体动力学 (10)1 刚体系统一般力学研究的对象,是由两个或两个以上刚体通过铰链等约束联系在一起的力学系统,为一般力学研究对象。
自行车、万向支架陀螺仪通常可看成多刚体系统。
人体在某种意义上也可简化为一个多刚体系统。
现代航天器、机器人、人体和仿生学中关于动物运动规律的研究都提出了多刚体系统的一系列理论模型作为研究对象。
多刚体系统按其内部联系的拓扑结构,分为树型和非树型(包含有闭链);按其同外界的联系情况,则有有根和无根之别。
利用图论的工具可以一般地分析多刚体系统的构造,建立系统的数学模型和动力学方程组。
也可从分析力学中的高斯原理出发,用求极值的优化算法直接求解系统的运动和铰链反力。
依照多刚体系统动力学的理论和方法,广泛采用电子计算机对这些模型进行研究,对于精确地掌握这些对象的运动规律是很有价值的。
1.1 自由物体的变分运动方程任意一个刚体构件i ,质量为i m ,对质心的极转动惯量为i J ',设作用于刚体的所有外力向质心简化后得到外力矢量i F 和力矩i n ,若定义刚体连体坐标系y o x '''的原点o '位于刚体质心,则可根据牛顿定理导出该刚体带质心坐标的变分运动方程:0][][=-'+-ii i i i i i T i n J F r m r φδφδ&&&& (1-1) 其中,i r 为固定于刚体质心的连体坐标系原点o '的代数矢量,i φ为连体坐标系相对于全局坐标系的转角,i r δ与i δφ分别为i r 与i φ的变分。
定义广义坐标:T i T i i r q ],[φ= (1-2)广义:T i T i i n F Q ],[= (1-3)及质量矩阵:),,(i i i i J m m diag M '= (1-4)体坐标系原点固定于刚体质心时用广义力表示的刚体变分运动方程:0)(=-i i i T i Q q M q &&δ (1-5)1.2 束多体系统的运动方程考虑由nb 个构件组成的机械系统,对每个构件运用式(1-5),组合后可得到系统的变分运动方程为:0][1=-∑=i i i nb i T i Q q M q&&δ (1-6)若组合所有构件的广义坐标矢量、质量矩阵及广义力矢量,构造系统的广义坐标矢量、质量矩阵及广义力矢量为:T T nb T T q q q q ],...,,[21= (1-7)),...,,(21nb M M M diag M = (1-8)T T nb T T Q Q Q Q ],...,,[21= (1-9)系统的变分运动方程则可紧凑地写为:0][=-Q q M q T &&δ (1-10)对于单个构件,运动方程中的广义力同时包含作用力和约束力,但在一个系统中,若只考虑理想运动副约束,根据牛顿第三定律,可知作用在系统所有构件上的约束力总虚功为零,若将作用于系统的广义外力表示为:T TA nb T A T A A Q Q Q Q ],...,,[21= (1-11) 其中:T A TA i A i n F Q ],[=,nb i ,...,2,1= (1-12) 则理想约束情况下的系统变分运动方程为:0][=-A T Q q M q &&δ (1-13)式中虚位移q δ与作用在系统上的约束是一致的。
多体系统动力学基本理论

多体系统动力学基本理论第2章多体系统动力学基本理论本章主要介绍多体系统动力学的基本理论,包括多刚体系统动力学建模、多柔体系统动力学建模、多体系统动力学方程求解及多体系统动力学中的刚性(Stiff)问题。
通过本章的学习可以对多体系统动力学的基本理论有较深入的了解,为具体软件的学习打下良好的理论基础。
2.1 多体系统动力学研究状况多体系统动力学的核心问题是建模和求解问题,其系统研究开始于20世纪60年代。
从60年代到80年代,侧重于多刚体系统的研究,主要是研究多刚体系统的自动建模和数值求解;到了80年代中期,多刚体系统动力学的研究已经取得一系列成果,尤其是建模理论趋于成熟,但更稳定、更有效的数值求解方法仍然是研究的热点;80年代之后,多体系统动力学的研究更偏重于多柔体系统动力学,这个领域也正式被称为计算多体系统动力学,它至今仍然是力学研究中最有活力的分支之一,但已经远远地超过一般力学的涵义。
本节将叙述多体系统动力学发展的历史和目前国内外研究的现状。
2.1.1 多体系统动力学研究的发展机械系统动力学分析与仿真是随着计算机技术的发展而不断成熟的,多体系统动力学是其理论基础。
计算机技术自其诞生以来,渗透到了科学计算和工程应用的几乎每一个领域。
数值分析技术与传统力学的结合曾在结构力学领域取得了辉煌的成就,出现了以ANSYS、NASTRAN等为代表的应用极为广泛的结构有限元分析软件。
计算机技术在机构的静力学分析、运动学分析、动力学分析以及控制系统分析上的应用,则在二十世纪八十年代形成了计算多体系统动力学,并产生了以ADAMS和DADS为代表的动力学分析软件。
两者共同构成计算机辅助工程(CAE)技术的重要内容。
多体系统是指由多个物体通过运动副连接的复杂机械系统。
多体系统动力学的根本目的是应用计算机技术进行复杂机械系统的动力学分析与仿真。
它是在经典力学基础上产生的新学科分支,在经典刚体系统动力学上的基础上,经历了多刚体系统动力学和计算多体系统动力学两个发展阶段,目前已趋于成熟。
第2章 刚体的定点运动

设定点O、本体坐标原点和空间坐标原点三 者重合,刚体对O点的动量矩为 z z′ y y′ O x′ x
dri′ n dri J = ∑ ri′× mi = ∑ ri × mi d d t t i =1 i =1
n
= ∑ mi [ri × (ω × ri )] = ∑ mi [ωri 2 − ri (ω ⋅ ri )]
i =1 i =1
n
n
质量连续分布的刚体
J = ∫ [ωr 2 − r (ω ⋅ r )]dm
V
动量矩的方向一 般与角速度的方 向不一致
J在本体坐标系中的分量形式
J x = I xxω x + I xyω y + I xzω z J y = I yxω x + I yyω y + I yzω z J z = I zxω x + I zyω y + I zzω z
1、首先求I的三个实特征值
2 / 3 − λ / β det −1/ 4 −1/ 4
−1/ 4 2/3−λ / β −1/ 4
−1/ 4 =0 2/3−λ / β
−1/ 4
1 11 λ1 = β ; λ2 = λ3 = β 6 12
2、求三个特征矢量
−1/ 4 −1/ 4 ωx 2 / 3 − 1/ 6 −1/ 4 ω = 0 2 / 3 − 1/ 6 − 1/ 4 y −1/ 4 − 1/ 6 2 / 3 − 1/ 6 −1/ 4 ω z
•A
平面平行运动
定点转动:刚体运动时,有一点始终不动,整个刚体 围绕着通过这点的某一瞬时轴线转动——3个自由度
一般运动:刚体不受任何约束,可以在空间任意运动, 分解为质心的平动(3个平动自由度)与绕通过质心的某 一条直线的定点转动(3个转动自由度)——6个自由度。
复杂刚体动力学参数测试系统使用说明书-MPC500
X 与转轴夹角 0
Y
Z
90
90
状态二:保持 Z 轴与测量平台平行,翻滚发动机绕 Z 轴旋转 90 度,使其 Y 轴垂直于测量平台,此时发 动机的三个坐标轴与转轴的夹角分别为:
X
Y
一台
一台
二套 一个 两个 两个 一个 一块 二套 二块 三个 一套 一台 一个 一套 一套
2
复杂刚体动力学参数测试系统使用维护说明书 型号:MPC500、MPC50
14. 15. 16.
产品合格证 产品保修卡 测试工装
一套 一套 两套
三、主要技术指标
质量测量范围:0~50KG;50~500KG; 质量测量误差:≤±0.5%; X 方向质心测量误差:≤1mm; Y 方向质心测量误差:≤1mm; Z 方向质心测量误差:≤1mm; X 方向转动惯量测量误差:≤1%; Y 方向转动惯量测量误差:≤1%; Z 方向转动惯量测量误差:≤1%; 能同时计算三个方向的惯性积。
量,而用传统方法需要 3 台仪器才能分别测量出这 3 种物理量。 2. 测量精度高。复杂刚体动力学参数测试系统安装有高精度称重传感器,保证了测试的准
确性。该仪器还配有标准体及标定程序,通过十分简单的标定过程,便可保证仪器在高 精度测试状态下长时间不间断的工作。 3. 有安全保障。复杂刚体动力学参数测试系统在设计时非常注重安全性。在电动移动件上 都装有限位装置,在机械结构上很多地方都安装有保护装置。 4. 操作简单。复杂刚体动力学参数测试系统配有专用的测试软件,每一步操作在软件中都 有明确的提示。操作人员只需通过简单的培训便可自行完成测试任务。
多体系统动力学计算方法概述
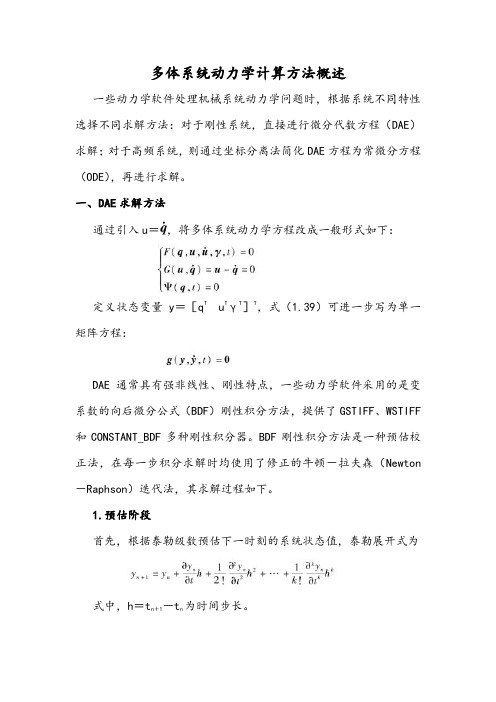
多体系统动力学计算方法概述一些动力学软件处理机械系统动力学问题时,根据系统不同特性选择不同求解方法:对于刚性系统,直接进行微分代数方程(DAE)求解;对于高频系统,则通过坐标分离法简化DAE方程为常微分方程(ODE),再进行求解。
一、DAE求解方法通过引入u=,将多体系统动力学方程改成一般形式如下:定义状态变量y=[q T u TγT]T,式(1.39)可进一步写为单一矩阵方程:DAE通常具有强非线性、刚性特点,一些动力学软件采用的是变系数的向后微分公式(BDF)刚性积分方法,提供了GSTIFF、WSTIFF 和CONSTANT_BDF多种刚性积分器。
BDF刚性积分方法是一种预估校正法,在每一步积分求解时均使用了修正的牛顿-拉夫森(Newton -Raphson)迭代法,其求解过程如下。
1.预估阶段首先,根据泰勒级数预估下一时刻的系统状态值,泰勒展开式为式中,h=t n+1-t n为时间步长。
通常,这种预估算法得到的下一时刻系统状态并不准确,可以使用向后差分积分方法进行校正。
在此使用Gear积分方法进行校正:式中,y n+1是t=t n+1时刻的近似值;β0和αi均是Gear积分方法的参数。
2.校正阶段将预估的状态值y代入系统动力学方程g(y,,t)=0进行验证,如果满足g=0,那么y即为方程的解。
否则采用修正的Newton -Raphson法进行迭代求解,其迭代校正表达式为式中,J为系统的雅可比(Jacobian)矩阵。
3.误差控制阶段将预估和校正值间的误差与误差精度比较,如果小于规定的误差精度,进行下一时刻的计算求解。
否则舍弃此解,并且优化积分步长和阶数,重新由第一步开始进行预估-校正步骤。
当达到设定的仿真结束时间,停止计算。
二、ODE求解方法对于多数类型的多体系统动力学方程,将其转换为n维一阶常微分方程组为因此,仿真计算的直接数值方法可归纳为对常微分方程组初值问题的求解。
利用欧拉方法,通过化导数为差商可将式写为1.龙格-库塔法作为求解非线性常微分方程重要的一类隐式或显式迭代法,龙格-库塔法(Runge-Kutta)仅需已知一阶导数值,可由式求得。
质点在柱坐标系中的动力学方程
质点在柱坐标系中的动力学方程质点动力学是研究物体运动的一门学科,其中柱坐标系是一种在三维空间中定义物体位置的坐标系统。
在柱坐标系中,质点的动力学方程可以用来描述质点运动的动力学规律。
柱坐标系是由三个坐标轴组成,分别为X、Y、Z轴,X轴和Y轴形成一个平面,Z轴从X-Y平面顶部延伸出去。
在柱坐标系中,质点的位置可以用坐标(x,y,z)来表示,其中x、y、z分别表示质点沿X、Y、Z轴的位移。
质点的动力学方程可以用牛顿第二定律推导得出,牛顿第二定律表示:质点受到的力等于质量乘以加速度,即F=ma。
因此,在柱坐标系中,质点的动力学方程可以写成如下形式: $F_x=mfrac{d^2x}{dt^2}$$F_y=mfrac{d^2y}{dt^2}$$F_z=mfrac{d^2z}{dt^2}$其中,$F_x$、$F_y$和$F_z$分别表示质点受到的沿X、Y、Z轴的力,m表示质点的质量。
除了以上三个方程外,还有一组额外的方程,即把物体的加速度表示为柱坐标系中的矢量:$a_x=frac{d^2x}{dt^2}$$a_y=frac{d^2y}{dt^2}$$a_z=frac{d^2z}{dt^2}$这三个方程可以用来求解质点在柱坐标系中的动力学方程,即质点运动的位移、速度和加速度等物理量。
以上就是质点在柱坐标系中的动力学方程的简要介绍,质点的动力学方程可以用来求解质点的运动轨迹,为此,泛函力学和拉格朗日方程组等解析方法可以用来求解质点的运动轨迹。
此外,还可以使用数值方法,如欧拉法、龙格库塔法、蒙特卡洛方法等,来解决质点动力学问题。
总之,质点动力学方程可以用来研究质点在柱坐标系中的运动规律,它也是物理力学中重要的研究对象,对于研究复杂系统的运动情况,质点动力学方程也有着重要的应用价值。
以上就是有关质点在柱坐标系中的动力学方程的介绍,以及质点动力学方程的应用。
质点动力学方程的研究也可以帮助我们更深入地理解物理学中最基本的运动规律,也可以为物理学家分析复杂系统的运动情况提供基础性的理论依据。
姿态动力学方程

姿态动力学方程姿态动力学方程是描述刚体旋转运动的方程。
在刚体旋转运动中,我们关注的是刚体的姿态(旋转的角度)随时间的变化规律。
姿态动力学方程描述了刚体的角速度和角加速度与外力矩的关系。
姿态动力学方程的推导可以从牛顿第二定律开始。
我们先来考虑一个质点在直角坐标系中的运动,它受到一个力F的作用。
根据牛顿第二定律,质点的加速度a与所受力F的关系可以写为:F = ma (式1)其中,m是质点的质量。
如果我们把质点的线加速度与角加速度联系起来,可以写为:a = α × r (式2)其中,α是质点的角加速度,r是质点到转轴的距离。
代入式2到式1中,可以得到:F = mα × r (式3)接下来,我们考虑一个刚体的旋转运动,它由很多个质点组成。
每个质点都受到一些力的作用,这些力可以分为两类:一类是作用在质点上的外力,另一类是由于与其他质点的相互作用而产生的内力。
根据统计物理学的知识,当刚体的质量很大时,内力可以忽略不计。
因此,我们只考虑作用在质点上的外力。
假设有一点P在刚体上,受到一个外力FP的作用。
如果我们把P 点看作质点,那么依据式3,FP与P点的角加速度αP的关系可以写为:FP = mP × αP × rP (式4)其中,mP是P点的质量,rP是P点到转轴的距离。
同样地,我们可以考虑刚体上的其他点,得到它们与对应的角加速度的关系式。
将这些关系式相加,可以得到刚体总的外力与总的角加速度的关系:∑FP = ∑(mP × αP × rP) (式5)这里,∑表示对刚体上的每个点求和。
接下来,我们考虑一个极限情况,即当质点的质量趋向于无穷大时,刚体可以看作连续分布的物体。
那么刚体上的每一个质点都可以看作极小的一部分,我们可以用微分的方式写出式5:∫F dV = ∫(ρ × α × r) dV (式6)其中,∫表示对整个刚体的体积进行积分,F是作用在刚体上的外力,dV是刚体的微元体积,ρ是质点的线密度,α是质点的角加速度,r是质点到转轴的距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(3)
选择准速度的条件为:(2)和(3)两个式子中所包含的 n 个函数的 Jacobi 矩阵非奇异。
由方程(1) (2)得到广义速度的表达式并微分得到:
∑ ∑ n
qj =
=s
1= ∂∂qqsj qs + km1
∂q j ωk
ωk
+
∂q j ∂t
( j, s =1,,n;k =1,,m)
(4)
定义下列矩阵:
2. 准速度、准加速度与广义坐标及广义加速度关系的矩阵表示
设系统由 n 个广义坐标描述,系统受到 g 个一阶非完整约束:
( ) fk q j , q j ,t = 0 ( j = 1,, n; k = m +1,, n; m = n − g )
(1)
其中 m 为系统的自由度数,可取后面 n − m =g 个准速度为:
DOI: 10.12677/dsc.2020.92011
122
动力系统与控制
郝鑫 等
复杂的广义逆矩阵的计算问题[8] [9] [10]。 高斯原理往往被认为是更具普适性的分析力学的基本原理,可适用于完整、非完整约束系统;同时
准坐标表达的方程具有很大的概括性(用广义坐标表达不过是它的特殊情形),而且方程的结果往往很简 洁,都是一阶方程。
Dynamic Equation and Numerical Simulation of Nonholonomic Multibody System in Quasi-Coordinate Form
Xin Hao, Yanping Liu, Wenli Yao* Qingdao Key Laboratory for Geomechanics and Offshore Underground Engineering, College of Science, Qingdao University of Technology, Qingdao Shandong
( ) πk = ωk = fk q j , q j ,t ≡ 0
(
j
= 1, ,n;k
= m + 1, ,n;
m
= n − g )
(2)
前面 m 个准速度可选为以 q j , q j ,t 为变量的 m 个其它任意函数:
( ) πk= ωk= fk q j , q j ,t ( j= 1,,n;k= 1,,m;m= n − g )
qs
+
∂q j ∂t
n×1
.
则方程(4)可表达为矩阵形式:
=q Dωω + w
(5)
对(5)求变分,得到:
δ q = Dωδω
(6)
3. 以准坐标表示的动力学微分方程
Euler-Lagrange 形式的 Gauss 原理为[2] [3]:
∑n ∂T
s
=1
∂qs
−
d dt
∂T ∂q s
+ Qs
Open Access
1. 引言
“完整”和“非完整”是力学上对约束和系统的分类概念。完整约束是对系统位形的限制,非完整 约束是对系统运动的限制。自从 Hertz 于 1894 年首次提出非完整系统的一些重要概念以来,众多学者在 非完整系统的基本原理、基本方程及在工程中的应用都取得了重要进展。
非完整系统动力学方程的建立主要依据如下力学原理:1) DLP 原理(D’Almbert 及 Bernoulli 原理); 2) Gauss 原理和 Jourdain 原理;3) Hamilton 原理。其中 Gauss 原理往往被认为是更具普适性的分析动力 学的基本原理[1]。
Dynamical Systems and Control 动力系统与控制, 2020, 9(2), 121-128 Published Online April 2020 in Hans. /journal/dsc https:///10.12677/dsc.2020.92011
郝鑫 等 青岛理工大学理学院岩土力学与近海地下工程重点实验室,山东 青岛 收稿日期:2020年3月12日;录用日期:2020年3月31日;发布日期:2020年4月7日
摘要
本文的目标是研究针对非完整多体系统动力学与控制问题的更简单规范的动力学建模方法。采用欧拉– 拉格朗日形式的高斯原理推导了适于非完整多体系统的准坐标形式的动力学运动微分方程。与目前常用 的以动力学状态函数表达的针对非完整系统的动力学微分方程相比,文中的推导方法简单直接,得到的 方程维数与自由度一致,且方程以准速度的显式矩阵表达,具有较强的通用性及规范性,适用于多体系 统的程式化建模及计算的要求。针对例子中的典型非完整系统,建立了准速度表达的一阶运动微分方程 并进行了数值模拟以及相应的动力学特性分析,与通常用于该类问题的带乘子的Routh方程相比,文中 的方法在计算速度上占优,同时在不进行额外的违约修正的前提下,可较好地解决违约及位置奇异问题。
非完整多体系统的动力学建模主要基于上述几种典型的动力学方程, 上述方程的共同特点是:由表 征系统运动状态的某函数(动能、Hamilton 函数、加速度能等)及广义力按照规定的微分算子就能得到,思 路清晰、表达简洁是其一大优点,但方程的不足之处在于建立了动力学基本函数后,还需经过微分算子 的求导运算,对于比较复杂的系统,这种求导运算过程非常冗长。相比而言,Appell 方程中的微分算子 是最简单的,但建立复杂系统的 Appell 函数并非易事,Kane 通过 Jourdain 原理,得到用准坐标表达的动 力学微分方程,但在求偏速度、广义主动力及广义惯性力的过程涉及到矢量运算,符号复杂运算繁琐[4] [5] [6] [7]。Udwadia 等从 Gauss 原理出发,得到 U-K 方程,可以处理一阶非完整系统,但该方程中涉及非常
关键词
准速度,非完整系统,高斯原理,多体系统,准坐标
Copyright © 2020 by author(s) and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY 4.0). /licenses/by/4.0/
δ qs
= 0
(7)
将系统动能表达为广义速度的显式:
∑∑ ∑ T
=
T2
+ T1 + T0
=
1n n
2 =s
1=k
Aks q s qk
1
n
+ Bsqs
=s 1
+ T0
DOI: 10.12677/dsc.2020.92011
123
动力系统与控制
郝鑫 等
则(7)式可写为:
( Aq+ g − Q)δ q =0
因此,本文引进了由准坐标表达的坐标系统,采用高斯原理作为基本原理进行了动力学方程的推导。 文中得到了以准速度的显式矩阵表达形式的非完整多体系统的动力学微分方程,并以此作为建模的基本 方程,研究了非完整系统典型例子的动力学问题,与目前常用的 Routh 方程的方法进行对比分析,从而 探索研究非完整系统动力学与控制问题的更简单规范的建模方法。
Keywords
Quasi Velocity, Non-Holonomic System, Gauss Principle, Multi-Rigid Body System, Quasi-Coordinate
准坐标形式的非完整刚体系统动力学方程及数 值模拟
郝 鑫,刘彦平,姚文莉*
*通讯作者。
文章引用: 郝鑫, 刘彦平, 姚文莉. 准坐标形式的非完整刚体系统动力学方程及数值模拟[J]. 动力系统与控制, 2020, 9(2): 121-128. DOI: 10.12677/dsc.2020.92011
q = [q1 qn ]T , q = [q1 qn ]T , q = [q1 qn ]T , π = [π1 π m ]T ,
[ ] [ ] ∑ ω = ω1
ωm T , ω ′ = ω1
ωm T ,
Dω
=
∂q j
∂ωk
k =1,,m = , w j =1, ,n
n s=1
∂q j ∂qs
在非完整系统动力学的发展过程中,基于上述原理建立起各种不同的动力学方程,这些方程形式各 异,一般可以划分为两类:1) 基于乘子理论的动力学方程,如 Routh 方程[2];2) 约化的不带乘子的动 力学方程,如 Maggi 方程、Appell 方程等[3]。这些方程数学上等价,但数值求解中表现的特性并不相同 [4]。
(8)
其中
A
=
[
Aks
]n×n
为正定且对称的矩阵,
g
( q, q,
t
)
=
[gs
]T s =1, ,n
,其中
∑ ∑[ ] ∑ ∑ [ ] = gs
nn =k 1=m 1
k , m; s
qk qm
n
−
=k
1
∂Bk ∂qs
− ∂Bs ∂qk
qk
+ ∂Bs ∂t
− ∂T0 ∂qs
+=k= n1 ∂∂Atk qk ; Q
Received: Mar. 12th, 2020; accepted: Mar. 31st, 2020; published: Apr. 7th, 2020
Abstract
The goal is to study a simpler and more canonical dynamic modeling method for nonholonomic multibody system dynamics and control problems. By using the Euler-Lagrangian form of Gauss principle, the differential equations of dynamic motion suitable for nonholonomic multibody systems in quasi-velocity form are derived. Compared with the dynamic differential equations for nonholonomic systems, which are usually expressed in terms of energy functions and generalized coordinates, the method of derivation presented is simple and direct, and the obtained equations are expressed in explicit matrices of quasi-velocity consistent with the degrees of freedom. It has strong generality and standardization, and is suitable for programming modeling and calculation of multibody system requirements. For the example of nonholonomic system, the differential equation of motion expressed by quasi-velocity is established, and the numerical simulation and the corresponding dynamic characteristics are carried out. Compared with the Routh equation with multipliers, the proposed method is superior in computational speed and can be used to solve the constrained default and location singular problems.