异步电动机矢量控制系统的仿真研究_胡安平
异步电动机矢量控制系统仿真研究

摘要 :以异步电机矢量控制原理为基础 ,通过坐标变换和转子磁链位置计算 ,利用 M t b i u n 构建一种异 步电动机矢量 控 aa/m lk l S i 制系统的模型。通过 仿真不仅验证 了模型的正确性 ,而且 还为实际调速 系统控制算法实现提供可靠的分析 依据 。 关键词 : 矢量 控制 ;异步 电动机 ;M t b i u n a a 矩
分别独立控制 ,从而使交 流电动
收稿 日期 :2 1 一l ~0 01 1 2
— 嚣
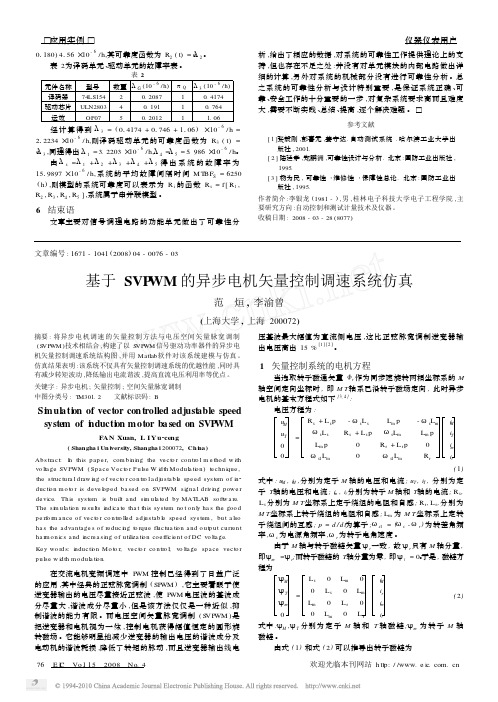
图 1 异步电动机矢量控制 系统结构 图
耳 曩 — —— — — — —下 尊 碍
弱 j ]
L l l 4 一一l —ll 0L i \
Ab t a t s r c :Ac o d n o t e ba i rn i ls o n u t n moo e tr c n r l a smu a i n mo e f s e d o h nn r t r ue n c r i g t h sc p i c p e f i d c i t r v e o o to , i l t d l o p e ft e i e o q a d o o
1 言 引
直 流 电动 机调 速 系 统具 有 优 良的静 、动态 调
机具 有 了直 流 电动机 的全 部点 。 由于 直轴 和 转 子 磁场 重合 ,因此 也称 转子 磁场定 向控 制 。
速 特性 ,其 根本 原 因在 于作为控 制对象 的他励
直 流 电动 机 电磁 转 矩 能 够 容 易 而 灵 活 地 进 行 控 制 ” 。。在 17 年 德 国学 者提 出 的矢量变 换控 制方 91 法 中 ,正 交 旋 转 坐标 系 的直 轴 励 磁 轴 ( 与 转 子 磁 场 重 合 ,交 M) 轴为转矩轴 () T ,转 子磁 场 的交 轴 分 量 为 零 , 电磁转 矩 的方 程 得
异步电机SVPWM矢量控制系统仿真

第27卷第1期2010年1月机 电 工 程Journal of Mechanical &Electrical EngineeringVol .27No .1Jan .2010收稿日期:2009-07-08作者简介:余秋实(1985-),男,湖北荆州人,主要从事电机控制方面的研究.E 2mail:yuqiushi_cq@异步电机SVP W M 矢量控制系统仿真余秋实,王秋晓(重庆大学机械工程学院,重庆400044)摘 要:为了研究异步电机矢量控制系统在不同负载下的动态特性,在利用Matlab /Si m ulink 构建二相静止α2β坐标下异步电机数学模型的基础上,建立了基于电压空间矢量脉宽调制(S VP WM )的异步电机矢量控制模型,并对电机的启动性能以及负载为阶跃、斜坡和正弦输入的情况进行了仿真分析。
仿真结果表明所构建的系统模型动态过程符合实际调速系统运动过程。
关键词:Matlab /Si m ulink;异步电机;空间矢量脉宽调制;矢量控制中图分类号:T M921.51 文献标识码:A 文章编号:1001-4551(2010)01-0076-04S im ul a ti on of the SVP W M vector con trol syste m for a synchronous m otorY U Q iu 2shi,WANG Q iu 2xiao(College of M echanical Engineering,Chongqing U niversity,Chongqing 400044,China )Abstract:A i m ing at studying dynam ic characteristics of vect or contr ol system for asynchr onous mot or on different l oad on this ba 2sis,a mathematical model of asynchr onous mot or in static α2βcoordinate was established by the M atlab /Si m ulink,a si m ulati on model of asynchr onous mot or vect or contr ol syste m based on s pace vect or pulse width modulati on (S VP WM )was established .Then s ome situati ons such as starting perfor mance and input l oad for step,ra mp and sine wave were si m ulated and analyzed .The si m ulati on results p r ove that the above model πs dyna m ic p r ocess accords with p ractical s peed regulating p r ocess .Key words:Matlab /Si m ulink;asynchr onous mot or;s pace vect or pulse width modulati on (S VP WM );vect or contr ol0 引 言交流电动机是多变量、非线性、强耦合的被控对象,20世纪70年代德国学者B laschke 等人提出了矢量控制理论,使得交流异步电机定子电流励磁分量和转矩分量之间实现解耦,从而使交流异步电动机的磁通和转矩分别进行独立控制,这样交流异步电动机变频调速系统就具有了直流调速系统的全部优点。
基于SVPWM的异步电机矢量控制调速系统仿真
[ 1 ]张毅刚 ,彭喜元 ,姜守达. 自动测试系统 . 哈尔滨工业大学出 版社 , 2001.
[ 2 ] 陆廷孝 ,郑鹏洲 ,可靠性设计与分析. 北京 :国防工业出版社 , 1995.
[ 3 ] 杨为民 , 可靠性 ·维修性 ·保障性总论. 北京 :国防工业出 版社 , 1995.
作者简介 :李银龙 (1981 - ) ,男 ,桂林电子科技大学电子工程学院 ,主 要研究方向 :自动控制和测试计量技术及仪器 。 收稿日期 : 2008 - 03 - 28 ( 8077)
2转子磁链给定值它机参数为一常数但是在额定转速以上即定子频率大于50hz时为了使定子电压不超过额定值那么试就必须相应的减小也就是常说的弱磁升速根据公式3可以算出励磁分量成it1过直角坐标到极坐标的变换得到定子电流幅值i过静止三相到静止二相变换后得到实际的电流幅值i1与i较后通过pi调节用来控制svpwm矢量的幅值大小
时 ,为了使定子电压不超过额定值 ,那么试就必须相应的减小 ,
也就是常说的弱磁升速 , 根据公式 ( 3) 可以算出励磁分量成
im31;电流的 M T轴分量 im31 , i3t1 过直角坐标到极坐标的变换得到
Ls 分别为 M T坐标系上定子绕组的电阻和自感 ; Rr, L r, 分别为
M T坐标系上转子绕组的电阻和自感 ; Lm 为 M T坐标系上定转
子绕组间的互感 ; p = d / d t为算子 ;ωs1
= (ωs-ω r Nhomakorabea)
为转差角频
率 ,ωs 为电源角频率 ,ωr 为转子电角速度 。
由于
M
轴与转子磁链矢量
近此理想磁通 。此方法将逆变系统和电机看成是一个整体 ,数
学模型简单 ,也便于微处理器实时控制 [5 ] [6 ] 。
异步电动机矢量控制系统仿真研究
异步电动机矢量控制系统仿真研究摘要:本文以异步电机矢量控制原理为基础,通过坐标变换和转子磁链位置计算,利用Matlab/Simulink 构建一种异步电动机矢量控制系统的模型。
通过仿真不仅验证了模型的正确性,而且还为实际调速系统控制算法实现提供可靠的分析依据。
关键词:矢量控制;异步电动机;Matlab/Simulink1 引言直流电动机调速系统具有优良的静、动态调速特性,其根本原因在于作为控制对象的他励直流电动机电磁转矩能够容易而灵活地进行控制[1-2]。
在1971 年德国学者提出的矢量变换控制方法中,正交旋转坐标系的直轴励磁轴(M)与转子磁场重合,交轴为转矩轴(T),转子磁场的交轴分量为零,电磁转矩的方程得到简化,即在磁场恒定的情况下,电磁转矩与交轴电流分量成正比,因此,感应电机的机械特性与他励直流电机的机械特性完全一样,实现了磁场和转矩的解耦控制。
像直流调速系统一样,实现了交流电动机的磁通和转矩分别独立控制,从而使交流电动机具有了直流电动机的全部点。
由于直轴和转子磁场重合,因此也称转子磁场定向控制[3-5]。
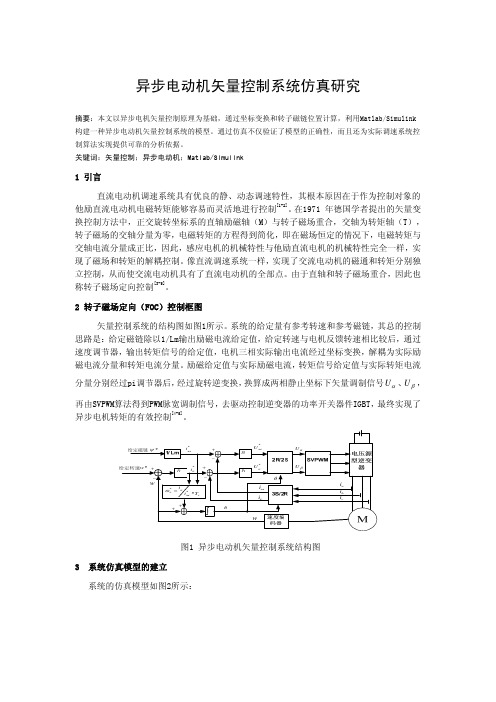
2 转子磁场定向(FOC)控制框图矢量控制系统的结构图如图1所示。
系统的给定量有参考转速和参考磁链,其总的控制思路是:给定磁链除以1/Lm输出励磁电流给定值,给定转速与电机反馈转速相比较后,通过速度调节器,输出转矩信号的给定值,电机三相实际输出电流经过坐标变换,解耦为实际励 磁电流分量和转矩电流分量。
励磁给定值与实际励磁电流,转矩信号给定值与实际转矩电流分量分别经过pi调节器后,经过旋转逆变换,换算成两相静止坐标下矢量调制信号αU 、βU ,再由SVPWM算法得到PWM脉宽调制信号,去驱动控制逆变器的功率开关器件IGBT,最终实现了异步电机转矩的有效控制[4-5]。
PI图1 异步电动机矢量控制系统结构图3 系统仿真模型的建立 系统的仿真模型如图2所示:图2 异步电动机矢量控制系统仿真图3.1 主要仿真模块介绍3.1.1 速度、转矩、磁链调节器模块三个调节器的参数值如表1;三个调节器的内部接线结构如图3所示。
异步电动机矢量控制系统的仿真

异步电动机矢量控制系统仿真1.异步电机矢量控制系统的原理及其仿真1.1 异步电动机矢量控制原理异步电机矢量变换控制系统和直接转矩控制系统都是目前已经获得应用的高性能异步电机调速系统,对比直接转矩控制系统,矢量变换系统有可以连续控制,调速范围宽的优点,因此矢量变换控制系统为现代交流调速的重要方向之一。
本文采用的是转子磁场间接定向电流控制型交流异步电机矢量控制系统[1],如图1所示。
图1矢量变换控制系统仿真原理图如果把转子磁链方向按空间旋转坐标系的M轴方向定向,则可得到按转子磁场方式定向下的三相鼠笼式异步电动机的矢量控制方程。
(1)(2)(3)(4)(5)上列各式中,是转子励磁电流参考值;是转差角频率给定值;是定子电流的励磁分量;是定子电流的转矩分量;是定子频率输入角频率;是转子速度;是转子磁场定向角度;是转子时间常数;和分别是电机互感和转子自感。
图4所示控制系统中给定转速与实际电机转速相比较,误差信号送入转速调节器,经转速调节器作用产生给定转矩信号,电机的激磁电流给定信号根据电机实际转速由弱磁控制单元产生,再利用式(1)产生定子电流激磁分量给定信号,定子电流转矩分量给定信号则根据式(2)所示的电机电磁转矩表达式生成。
、和转子时间常数Lr一起产生转差频率信号,与ωr相加生成转子磁场频率给定信号,对积分则得到转子磁场空间角度给定信号。
和经坐标旋转和2/3相变换产生定子三相电流给定信号、和,与定子三相电流实测信号、和相比较,由滞环控制器产生逆变器所需的三相PWM信号。
1.2 异步电机转差型矢量控制系统建模在MATLAB/SIMULINK环境下利用电气系统模块库中的元件搭建交流异步电机转差型矢量控制系统[2],电流控制变频模型如图2所示。
图2 电流控制变频模型图整个仿真图由电气系统模块库中的元件搭建组成,元件的直观连接与实际的主电路相像似,其中主要包括:速度给定环节,PI速度调节器、坐标变换模块、磁场定向模块、滞环电流调节器、IGBT逆变器元件、异步电动机元件以及测量和显示模块。
异步电机矢量控制系统的设计及仿真研究

在定子 电流的两 个分 量之 间实 现 了解耦 , i 唯一 决定 磁链 i则 只影 响转矩 , 与直流 电机 中的励磁 电流和 电枢 电流
相对应 , 这样就大大简化 了多变量强耦合 的交流变频调 速系
r b s e s h p e e u ao n ec re t e l tro a i o a e trc n rlu e P o tolr a d t e s e d o u t s .T e s e d r g l tra d t u r n g ao ft d t n lv c o o t s 1 n r l , n h p e n h ru r i o c e r s o s s o e v rh o n t e c n r lp o e s n o d rt o v h s rb e ,we p o o e e in meh d o e p n e f n o e s o ti h o t r c s .I r e o s l e t e e p o lms t o rp s d a d sg t o f s e d c n rl ri h n u t n mo o e trc n r l o e p r o e o u p e sn p e e p n e o es o t n i— p e o t l n t e id ci trv co o to rt u p s fs p r si g s e d r s o s v r h o n oe o f h i d ci n mo o e trc n r la d e h n i g i u t trv co o to n n a cn mmu i . T e i d ci n moo s d f l r n e e tr c n rl t — o nt y h n u t tr u e ed o e t d v c o o t o a o i i o
异步电动机矢量控制系统设计与仿真研究
异步电动机矢量控制系统设计与仿真研究THE DISIGN OF THE ASYNCHRONOUS MOTOR VECTOR CONTROL SYSTEM AND IT`S SIMULATION STUDY专业:电气工程及其自动化姓名:高智指导教师:申请学位级别:学士论文提交日期:学位授予单位:天津科技大学摘要本文的研究内容是“异步电动机矢量控制系统设计与仿真研究”。
在矢量控制技术出现之前,交流调速系统多为V / f比值恒定控制方法,又常称为标量控制。
采用这种方法在低速及动态(如加减速)、加减负载等情况时,系统表现出明显的缺陷,所以交流调速系统的稳定性、启动、低速时的转矩动态相应都不如直流调速系统。
随着电力电子技术的发展,交流异步电机控制技术全面从标量控制转向了矢量控制,采用矢量控制的交流电机完全可以和直流电机的控制效果相媲美,甚至超过直流调速系统。
矢量控制是在电机统一理论、机电能量转换和坐标变换理论的基础上发展起来的。
它的思想就是将异步电动机模拟成直流电动机来控制,通过坐标变换,将定子电流矢量分解为按转子磁场定向的两个直流分量并分别加以控制,从而实现磁通和转矩的解耦控制,建立三相交流绕组、两项交流绕组和旋转的直流绕组三者之间的等效关系,从而求出异步电动机绕组等效的直流电机模型,以便按照对直流电机的控制方法对异步电机进行控制。
因此他可以实现对电机电磁转矩的动态控制,优化调速系统的性能。
本文针对异步电动机磁链闭环矢量控制进行研究和探索。
通过空间矢量的坐标变换,对系统进行建模,其中包括直流电源、逆变器、电动机、转子磁链电流模型、ASR、ATR、AΨR等模块。
并对控制系统进行了MATLAB/Simulink仿真分析。
关键词:异步电动机;矢量控制;MATLAB仿真ABSTRACT:The content of this study is the design of the Asynchronous motor vector control system and it's simulation study. Before the advent of vector control technology, most of alternating current speed control system are constant V/f ratio control method which is also often referred as the scalar control. This approach in low-speed and dynamic (such as acceleration and deceleration), such as addition and subtraction load, the system showed obvious defects, so the stability of AC variable speed system, start torque at low speed dynamic response is not such as a DC tune speed system. With the development of power electronics technology, the AC induction motor control technology fully from the scalar control to vector control, vector control of AC motor can be comparable and DC motor control effects, even more than the DC speed control system.Vector control is developed on the basis of the motor unified theory of electrical and mechanical energy conversion and coordinate transformation theory. Its ideology is the asynchronous motor simulation into a DC motor to control, coordinate transformation, decomposition of the stator current vector for the rotor field oriented two DC components were controlled, in order to achieve the decoupling of flux and torque control, three-phase AC winding, two exchanges winding and rotation of the DC winding equivalence between the three, in order to find the equivalent asynchronous motor winding DC motor model, in order to control the DC motor control method for asynchronous motor . So that he can achieve dynamic control of the electromagnetic torque, optimize the performance of the speed control system. In this paper, the closed-loop vector control of asynchronous motor flux research and exploration. By the coordinates of the space vector transformation of the system modeling, including a DC power supply, inverter, motor, the rotor flux current model, the ASR, ATR AΨR and other modules. And control system for the MATLAB / SIMULINK simulation analysis.Key Words:Asynchronous Motor;Vector Control;MATLAB Simulation目录第一章绪论 (1)第一节交直流调速系统的相关概念及比较 (1)第二节交流调速系统的历史和现状 (2)第三节异步电机矢量调速系统的发展 (5)第二章异步电动机的数学建模分析 (7)第一节三相电机的模型分析 (7)第二节同步旋转坐标系上的数学模型及状态方程 (11)第三节异步电动机的数学模型 (12)第四节坐标变换和变换矩阵 (13)第五节异步电动机在不同坐标系下的数学模型 (20)第三章异步电动机矢量控制的基本原理 (23)第一节异步电机的电磁转矩 (23)第二节矢量控制思路的演变过程 (23)第三节矢量控制的磁场定向 (26)第四节转子磁链观测器 (28)第五节异步电机矢量控制系统 (30)第四章异步电动机矢量控制系统的仿真分析 (33)第一节SIMULINK软件基本介绍 (33)第二节异步电机矢量控制系统仿真模型的建立 (33)第三节各模块参数设置 (36)第四节仿真结果 (37)第五章全文总结 (40)参考文献 (41)致谢 (42)第一章绪论第一节交直流调速系统的相关概念及比较电动机+控制装置=电力传动自动控制系统。
异步电机矢量控制变频调速系统的仿真研究
第 1 2期
张晓玲 ,等 异步电机矢量控制变频调速系统的仿真研究
设计控制 器时可 略去此 部分
~
给
图 1 矢 量 变 换 控 制 系 统构 想
F g 1 Co c p fv c o o t o y t m i. n e to e t r c n r ls se
张 晓玲 ,许 伯 强
( 北 电力 大 学 电气 与 电 子 工程 学 院 ,河 北 保 定 0 10 ) 华 7 0 3 摘 要 :矢 量控 制 技 术 已经 成 为异 步 电机 一 种 主要 的控 制 方 式 , 目前 更 是 高性 能 异 步 电机 变 频 调 速 系 统 的
主要 方法。根据异步 电动机 矢量控制 的基本原理 ,基于 Ma a/ iuik 件搭建 了按 转子磁 场定 向的矢 tb Sm l 软 l n
量控 制 系统 的仿 真 模 型 ,分 析 了给 定转 速 突 变和 突加 负载 时 电机 的 运 行 情 况 ,并 给 出 了转 速 、 转 矩 、 电
流的仿真 波形 ,验证 了模型的正确性 ,结果表 明所建 立的调 速 系统具有 良好 的动 态性 能,实现 了系统 的
解耦 控 制 。
关键 词 : 矢量 控 制 ;异 步 电机 ; 电磁 转 矩
既然 异步 电动 机 经 过 坐标 变换 可 以等 效成 直
越来越 重要 的地 位 。矢 量 控 制 成 功地 解 决 了交 流 电枢 电流 。 样 ,实现 了对交 流 电 动机 的磁 通 和转 矩 分 别 独立 流 电动机 ,那 么模 仿 直 流 电 动 机 的控 制 方 法 ,求 控制 。矢量控 制 实 现 的基 本 原 理是 通 过 测 量 和控 得 直流 电动机 的控 制量 ,再 经 过 相 应 的 坐标 反 变 制异 步电动 机定 子 电流 矢量 ,根据 磁 场 定 向原 理 换 ,就能 够控制 异 步 电 机 了 。所 构想 的矢 量 变 换 分别对 异步 电动 机 的励 磁 电流 和转 矩 电流 进行 控 控 制系统 如 图 1所 示 。 图 中给定 的反 馈 信 号 经过 制 ,从 而达到控 制 异 步 电动 机 转 矩 的 目的 。将 异 类似 于直 流调速 系 统 所用 的控 制 器 产 生励 磁 电流 步 电动 机的定 子 电 流矢 量分 解 为 产 生磁 场 的 电流 的给定 信号 和 电枢 电流的给 定信号 ,经过 反 分量 ( 磁 电流 ) 和产 生 转矩 的 电流分 量 ( 矩 旋转 变换 V 得 到 :, ,再 经 过 二相/ 相 变 励 转 R Z 电流 )分 别加 以控 制 ,并 同时 控制 两 分 量 问 的幅 换得 到 , , 。把 这 3个 电 流控 制信 号 和 由
毕业设计——矢量控制异步电机调速系统仿真研究
矢量控制异步电机调速系统仿真研究摘要20世纪70年代德国专家提出了矢量变换控制的思想,矢量变换控制就是采用矢量变换使交流异步电机定子电流励磁分量和转矩分量之间实现解耦,使交流异步电动机的磁通和转矩分别进行独立控制, 从而使交流异步电动机变频调速系统具有了直流调速系统的全部优点。
本文介绍了异步电动机矢量控制的基本原理及转差频率矢量控制的相关概念,结合实际设计出矢量控制异步电机调速系统的结构图,根据异步电机模型和在调速系统中各子系统的模型,在SIMULINK环境下对该系统进行仿真,并得出仿真结果。
从试验和仿真结果可以看出:该方法简单、控制精度高,用于异步电动机调速系统中具有良好动、静态性能。
利用MATLAB/ SIMULINK模块对交流异步电动机矢量控制系统进行了建模仿真,说明了MATLAB/ SIMULINK 对于复杂的交流调速系统来说是一种很好的仿真工具,并且通过仿真波形的分析也验证了交流异步电动机按转子磁链定向的矢量控制系统具有较好的动、静态性能,完全可以适用于高动态性能的交流调速场合。
关键词:交流调速系统;转差频率;矢量控制;仿真建模Vector control of induction motor based on simulation studiesAbstract20th century 70s German experts put forward the idea of vector transform control. transform vector control use vector transformation to make the exchange of excitation of induction motor stator current components and torque decoupling between components, so that the magnetic AC asynchronous motor Qualcomm and independent control of torque, respectively, so that the exchange of asynchronous motor with variable frequency speed regulation system of the DC drive system all the advantages. This article introduces the asynchronous motor of the basic principles of vector control and slip frequency vector control of the basic concepts, practical design combined with vector control of induction motor based on the structure, according to the model of induction motor speed control system and the various sub- system model, in the SIMULINK environment simulation system and simulation results obtained.The simulation results from the tests can be seen: The method is simple, high precision. The control for induction motor speed control system has good dynamic and static performance.Using MATLAB / SIMULINK module of AC asynchronous motor vector control system modeling and simulation. Illustrate the MATLAB / SIMULINK for the complex AC Drive System is a good simulation tools, and through the simulation waveform analysis to verify AC induction motor according to the rotor flux-oriented vector control system has good dynamic and static performance, It can be applied to the exchange of high-speed dynamic performance occasions.Key words : AC Drive System;Slip frequency; Vector Control; Simulation Modeling目录引言 (1)第1章绪论 (2)1.1交流电机调速技术的发展状况 (2)1.2 现代交流调速系统的类型 (3)l.3 现代交流调速系统的发展趋势和动向 (4)1.3.1 控制理念与控制技术方面的研究与开发 (4)1.3.2 PWM模式改进与优化研究 (4)1.3.3 中压变频装置的研究与开发 (4)第2章矢量控制的基本原理 (6)2.1 异步电动机的数学模型 (6)2.2 矢量控制技术思想 (6)2.3 坐标变换 (7)2.3.1 坐标变换的基本思想和原则 (7)2.3.2 三相-两相变换 (10)2.4 转差频率矢量控制的基本概念 (12)2.5 转差频率矢量控制系统 (13)第3章模型的建立及仿真 (15)3.1 仿真软件简介 (15)3.2 矢量控制调速系统仿真和分析 (15)3.2.1电机仿真模块的建立 (16)3.2.2转速调节器模块 (17)3.2.3函数运算模块 (17)3.2.4 坐标变换模块 (17)第4章仿真结果及结果分析 (19)4.1 仿真模型 (19)4.2 仿真结果及分析 (19)结论与展望 (22)致谢 (23)参考文献 (24)附录 (24)插图清单图1-1 现代交流调速系统组成示意图 ....................................................................... - 3 - 图2-1 二极直流电机的物理模型 ............................................................................... - 8 - 图2-2 等效的交流电机绕组和直流电机绕组物理模型 ......................................... - 10 - 图2-3三相、两相静止坐标系与磁通势空间矢量 ................................................. - 11 - 图2-4 转差频率控制的异步电动机矢控制调速系统的结构图 ............................. - 14 - 图3-1转速PI调节器模块 ....................................................................................... - 17 - 图3-2函数运算模块 ................................................................................................. - 17 - 图3-3 坐标变换模块 ................................................................................................. - 18 - 图4-1矢量控制调速系统的仿真模型 ..................................................................... - 19 - 图4-2仿真波形图 ..................................................................................................... - 20 - 图4-3定子磁链轨迹图 ............................................................................................. - 21 -引言交流异步电动机是一个高阶、强耦合、非线性的多变量系统,该系统数学模型比较复杂,将其简化成单变量线性系统进行控制,动态性能不够理想,调节器参数很难准确设计,为了实现高动态性能, 20世纪70年代初德国西门子公司F.Blaschke提出了矢量控制的方法。
转差频率控制的异步电动机矢量控制系统的仿真研究资料
1 引言1.1 概述矢量变换技术的产生奠定了现代交流调速系统高性能的基础。
交流电动机是一个多变量、非线性、强耦合的被控对象,采用参数重构和状态重构的现代控制理论的概念,从而可以实现交流电动机定子电流的励磁分量和转矩分量之间的解耦过程,实现了将交流电动机的控制过程等效成为直流电动机的控制过程,进而使交流调速系统的动态性能得到了很大的改善和提高,进一步使交流调速取代直流调速成为一种可能。
目前对调速性能要求较高的生产工艺已广泛地采用了矢量控制的变频调速装置。
经过实践证明,采用矢量控制技术控制的交流调速系统[1]的优越性明显高于直流调速系统。
现代交流调速系统由交流电动机、电力电子功率变换器、控制器和检测器这四大部分构成。
现代交流调速系统根据被控的对象—交流电动机种类不同,从而可分为异步电机调速系统和同步电动机调速系统两类,矢量控制的方式是目前交流电动机的先进控制的一种方式,本篇文章对异步电动机的动态数学模型、转差频率矢量控制的基本原理[26] 和概念做了详细简要的阐述,并且结合Matlab的Simulink仿真软件包构建了异步电动机转差频率矢量控制系统的仿真模型,并进行了试验的验证和仿真结果的显示,同时对不同参数下的仿真结果进行了对比研究和分析。
这种方法不仅简单、控制精度高,而且能够较好地分析异步电动机调速系统的各项性能。
因为交流异步电动机是一个高阶、非线性、多变量、强耦合的系统。
该数学模型比较复杂,所以将其简化成单变量线性系统进行控制可能就达不到理想的性能。
为了实现高动态的性能,提出了矢量控制的方法。
矢量变换控制技术的产生为现代交流调速系统高性能化奠定了坚实的基础。
一般情况下,将含有矢量变换的交流电动机控制称为矢量控制。
Matlab是一种面向工程计算的高级语言,它的Simulink仿真的环境是一种非常优秀的系统仿真工具软件,使用它可以很大程度的提高系统仿真的效率和可靠性。
此文在Matlab的Simulink基础上构造了一个矢量控制的交流电机矢量控制调速系统,包含了给定、PI调节器、函数运算、二相/三相坐标变换、PWM脉冲发生器等许多环节,并给出了仿真的实验结果和分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西安: 西安电子科技大学出版社, 2 0 0 4 : 10-11. [2] 杨兆升,冯金巧.基于模糊综合推理的道路 交通事件检测算法[J].2003全国智能交通 系统交通信息采集与融合技术研讨会, 2003:61-66. [3] 温慧敏.交通事件检测数据融合技术研究 [ J ] . 第一届中国智能交通年会论文集, 2005:28-29.
异步电动机具有非线性、强耦合、多 变量的性质, 要获得良好的调速性能, 必须 从其动态模型出发, 分析异步电动机的转 矩和磁链控制规律, 研究高性能异步电动 机的调速方案。矢量控制就是基于动态模 型的高性能的交流电动机调速系统的控制 方案之一。所谓矢量控制, 就是通过矢量 变换和按转子磁链定向, 得到等效直流电 动机模型, 在按转子磁链定向坐标系中, 用 直流电动机的方法控制电磁转矩与磁链, 然后将转子磁链定向坐标系中的控制量经 逆变换得到三相坐标系的对应量, 以实施 控制。
为三相对称绕组的电流, 它们之
间的变换关系为
旋转角速度,则两相绕组通以直流电流就产生 空间旋转磁动势。从两相静止坐标系 到两 相旋转 坐标系的变换,称为两相旋转-两相 静止变换, 简称 C 变换。其变换关系为
(2)
(2)式中, 为 d-q 坐标系 d 轴与 坐标
系 轴之间的夹角
, 是 d-q 旋转坐
1 空间矢量的坐标变换
矢量变换是简化交流电动机复杂模型
的重要数学方法, 是交流电动机矢量控制
的基础。矢量变换包括三相静止坐标系和
两相静止坐标系的变换, 两相静止坐标系
和两相旋转坐标系的变换, 以及直角坐标
和极坐标的变换等。
1 . 1 三相静止坐标系和两相静止坐标系的
变换(简称 3 s / 2 s 变换)
如图 2,系统的主电路由直流电源 DC、逆 变器、电动机及其测量模块组成,其中逆变器 的驱动信号是采用电流滞环来控制的。控制 电路中, 转速调节器 A S R 的输出是转矩调节 器 ATR 的给定 ,而转矩的反馈信号 则通 过矢量控制方程式(8)式计算得到。电路中的
16
科技咨询导报 Science and Technology Consulting Herald
。而异步电动机的矢量控制方程式为
(8)
(8)式中, 为电动机极对数; 为两相 坐标系上同轴定、转子绕组间的互感; 为两相坐标系上定、转子绕组的自感; 为电动机转子磁链; 电动机的转差;
, 是转子电磁时间常数; p 为微分算 子。由(8)式可以计算出电动机转差 和定子 频率 以及转子磁链 。其计算模型如下图 1 所示。
参考文献 [1] 杨耕,罗应立.电机与运动控制系统[M].
北京: 清华大学出版社, 2 0 0 6 . [2] 阮毅,陈维钧.运动控制系统[M].北京:
清华大学出版社, 2 0 0 6 . [3] 洪乃刚.电力电子和电力拖动控制系统的
M A T L A B 仿真[ M ] . 北京: 机械工业出版 社,2006.
3 带转矩内环的转速、磁链闭环矢量控制 系统
按转子磁链定向的矢量控制系统将定子 电流分解为励磁分量和转矩分量,实现了两个 分量的解耦,但定子电流的两个分量的变化率 仍存在着交叉耦合。为了抑制这一现象,需采 用电流滞环控制, 使实际电流快速跟踪给定 值。另外, 在转速环后增加一个转矩闭环, 其 作用是当磁链一旦发生变化,相当于对转矩内 环的一种扰动作用, 必将受到转矩闭环的抑 制, 从而减少或避免磁链突变对转矩的影响, 达到削弱两个通道之间的惯性耦合作用。这 种带转矩内环的转速、磁链闭环矢量控制系 统的原理图如图 2 所示。
标系的旋转角速度。 为两相旋转到两相 静止坐标系的变换矩阵。即
(3)
对( 3 ) 式进行逆变换可以得到两相静止 到两
相旋转的变换矩阵为 (4)
1 . 3 三相静止坐标系和两相旋转坐标系的 变换
在得到三相静止坐标系到两相静止坐 标系的变换和两相静止到两相旋转的变换 矩阵后, 也可以得到三相静Байду номын сангаас坐标系到两 相任意旋转坐标系的变换
高 新 技 术
4 结语 交通信息尤其是动态交通信息的采集是
智能交通系统的关键技术之一,目前我国各个 城市都监视了不同规模的道路交通动态交通 信息采集的系统,但这些系统经常处于“各自 为政”的局面, 相互之间的协同不够, 本文介 绍了数据融合技术在交通事件判断、消除估 计误差方面的应用,对国内不同交通信息采集 方式之间的信息融合具有很强的借鉴意义。
(1)
上式中:Dp 为采用传统的方法计算的探测
车的平均延误 dj 为统计时段内第 j 辆车的延误 传统算法实际上是利用采集到的探测车
(样本)的平均延误估计去估计所有车辆的(总 体) 延误。利用传统算法和探测车的信息, 可 以提供一个简便的探测车延误的估计算法。 但由于所有车辆(总体)的延误并不等于探测车 (样本)的延误,所以应用传统算法,只能提供所 有车辆延误的有偏估计。
两相静止绕组 , 通以两相平衡交流 电流, 产生旋转磁动势。如果令两相绕组 转起来, 且旋转角速度等于合成磁动势的
相应的两相任意旋转坐标系到三相静 止坐标系的变换矩阵为
(7)
2 按转子磁链定向两相旋转坐标系上的转 子磁链的电流模型
按转子磁链定向两相旋转坐标系上的转 子磁链电流模型是通过检测定子三相电流和 转速 计算转子磁链,三相定子电流经 3s/2r 变换得到定子电流的励磁分量 和转矩分量
5 结语
由于交流电机的广泛应用,同时节能口号 的紧迫呼出, 交流调速技术不断发展, 使得交 流调速逐步具备了宽调速范围、高稳速精 度、快速动态响应等良好的技术性能。而带 转矩内环的转速、磁链闭环矢量控制实现了 定子电流励磁分量和转矩分量的解耦,同时连 续的 PI 控制,使得转矩与磁链变化平稳,能获 得良好的动态性能。
(下转 18 页)
科技咨询导报 2007 NO.26 Science and Technology Consulting Herald
图 1 A D V A N C E 项目数据融合流程
线圈数据修正算法, 具体理论如下: 反应交通状况的重要信息归根到底是行
程时间、行程车速,在不确定路段的起终点时 行程车速直接反应道路交通状况,对于行程时 间的准确的短期预测是人们想要做到的。行 程时间分为两部分: 行驶时间和延误时间, 假 定所有车的行驶时间是相等的,而区别在于延 误时间不相等,传统算法如下:
在交流电动机中三相对称绕组通以三
相对称电流可以在电动机气隙中产生空间
旋转的磁场, 在功率不变的条件下, 按磁动
势相等的原则, 三相对称绕组产生的空间
旋转磁场可以用两相对称绕组来等效, 三
相静止坐标系和两相静止坐标系的变换则
建立了磁动势不变情况下, 三相绕组和两
相绕组电压、电流和磁动势之间的关系。
设
为两相对称绕组的电流,
科技咨询导报 2007 NO.26 Science and Technology Consulting Herald 异步电动机矢量控制系统的仿真研究
高 新 技 术
胡安平 王晓峰 张广辉 ( 贵州大学 贵州贵阳 5 5 0 0 0 3 )
摘 要: 本文以矢量变换的思想为基础, 分析了按转子磁链定向两相旋转坐标系上的转子磁链电流模型, 提出了一种带转矩内环的转速、
18
科技咨询导报 Science and Technology Consulting Herald
可以利用线圈采集数据对上面的算法进 行改进, 将延误的统计时间分为几个小段, 假 定各个小段时间的通过的车辆数可以用线圈 检测到, 可以利用下式对传统算法进行改进, 改进后的算法如下:
(2)
上式中: 为采用改进后的算法计算的所 有车辆的无偏平均延误
i 为统计时段内的时间间隔数 Ni 为第 i 间隔内到达的车辆数 NT 为统计时段内到达的车辆总数 传统算法的样本均值和总体的均值的相 关系数为0.61,而改进算法和总体均值的相关 系数可以达到 0.81。把这种方法运用到城市 信号灯道路中,可以减少50%的行程时间预测 偏差。
以上仿真模型参数具体如下: A 电动机模型参数:
; 逆变器直流电源 D C 1 = D C 2 = 2 5 0 V
B 调节器仿真参数如表 1。
4 仿真结果分析 在给定转速为 1400r/min,空载启动,在
0.6s 时加载 65N*m,系统的仿真结果如图 3 所 示。其中图 3(a) ̄(c)分别为电动机转速、电 流、转矩的曲线,图 3(d)三个调节器的输出 信号波形。从波形中可以看到, 在矢量控制 下转速上升平稳, 加载后略有下降但随即恢 复,在 0.2s 达到给定转速时和 0.6s 加载时,系 统调节器和电流、转矩都有相应的响应。由于 ATR 和 ApsiR 都是带限幅的 PI 调节器,在起 动中两个调节器都处于饱和限幅状态,因此定 子电流的转矩和励磁分量都保持不变,定子电 流的给定值也不变,所以在启动过程中定子电 流基本保持不变,实现了恒流起动。由图 3(g) 定子磁链轨迹可以看出, 带磁链调节器后, 在 起动阶段, 磁场的建立比较平滑, 磁链呈螺旋 形增加,同时电动机转矩也不断上升。由图 3 (h)转矩-转速曲线可知,带磁链调节器的系统 起动转矩较大。
磁链闭环矢量控制系统。对该系统在 M a t l a b / S i m u l i n k 环境下进行了仿真研究, 并对仿真结果进行了分析。
关键词: 矢量变换 转子磁链 磁链闭环矢量控制
中图分类号: K 8 2 6 . 1 6
文献标识码: A
文章编号:1673-0534(2007)09(b)-0016-02
(5)
式中,三相静止坐标系到两相任意旋转坐 标系的变换矩阵为
(6)
(1)
式中, 是便于逆变换而增加的一相零序 分量。C3/2 为 3 s / 2 s 变换矩阵。 1 . 2 两相静止坐标系和两相旋转坐标系的 变换( 简称 2 s / 2 r 变换)