平台式惯导系统
合集下载
三种平台式惯导系统方案的性能分析

3
军事通信
黄 勇等 :三种平台式惯导系统方案的性能分析
度误差增长速度是相同的 。
对于结论中的第(1)点 , 可用如下理论加以解释 :
·
从惯导平台的方位误差角微分方程[ 7] γ=ωcpz -ωz +αωy -βωx +εz 可以看出 , 对方位误差角起主要作用的
是 ωcpz , ωz 和 εz , 另外两项 αωy 和 βωx 都是小量 。在 φc 和
c13 =si n K cos φ
c21 =-cos K sin φcos λ+sin K sin φ
c22 =-cos K sin φsin λ-sin K co s λ
c23 =cos K cos φ
c31 =cos φco s λ
c32 =cos φsin λ
c33 =si n φ
式中 :φ, λ, K 分别为纬度 、经度及游动方位角 。
台坐标系下的值 , 下标不带“c” 和“ p” 的表示理想值 。
2 .1 控制平台指令信息
对于自由方位惯导系统 , 控制平台指令 , 信息 ωcp x ,
ωcpy 为[ 5] :
ωcp x =c13 Ψ+ωep x
ωcpy =c13 Ψ+ωep y
(4)
ωcpz =0
对于游动方位惯导系统 , 控制平台指令 , 信息 ωcp x ,
对于游动方位惯导系统 , 有 : ωcpz = Ψsin φc , ωz = Ψsi n φ
2 .4 惯导系统的仿真流程 初始对准时 , 将平台系统调整到与水平指北方位系
统重合 。根据初始位置的经纬度 λ, φ及 K (初始时 K = 0)可确定 t0 时刻的导航位置参数矩阵 Cep 的值 。t0 时刻 导航坐标系 y 轴指北 , 从 t1 时刻起 , y 轴不再指北 , 而是 偏离一个角度[ 7] 。
三种平台式惯性惯导系统介绍

高精度与稳定性
智能化与自主化
利用人工智能、机器学习等技术,实 现了系统的智能化和自主化,提高了 导航和定位的准确性和可靠性。
通过采用先进的惯性传感器、优化算法和误 差补偿技术,提高了系统的测量精度和稳定 性,满足了高精度导航和定位的需求。
面临的市场挑战与机遇
要点一
挑战
市场竞争激烈,技术更新换代速度快,需要不断投入研发 和创新;同时,用户对价格、性能、体积、重量等方面的 要求越来越高。
性能优势
具有高精度、高稳定性、自主导航能 力强等优点。在长时间导航过程中, 能够保持较高的导航精度和稳定性, 不受外界干扰影响。
应用案例与效果展示
应用案例
该系统广泛应用于航空、航天、航海等领域的导航和定位。例如,在导弹制导、飞机导航、潜艇定位等方面都有 广泛应用。
效果展示
在实际应用中,该系统表现出了优异的导航性能和稳定性。例如,在某型导弹制导中,采用该系统后,导弹的命 中精度得到了显著提高;在某型飞机导航中,该系统成功实现了远程跨洋飞行的高精度导航。
现状
目前,平台式惯性惯导系统已经广泛应用于航空、航天、航海、陆地车辆和机器人等领域。随着技术 的不断进步和应用需求的不断提高,惯性惯导系统正朝着高精度、高可靠性、小型化和低成本的方向 发展。
应用领域与市场需求
应用领域
平台式惯性惯导系统广泛应用于军事和 民用领域。在军事领域,它主要用于导 弹制导、飞机导航、潜艇导航和士兵定 位等。在民用领域,它则用于民航飞机 导航、船舶导航、陆地车辆导航和机器 人导航等。
03 第二种平台式惯性惯导系 统
系统组成与结构特点
组成部件
该系统主要由惯性测量装置、计算机 、控制显示器和稳定平台等组成。
三种平台式惯性惯导系统介绍

AN/WSN-5和FIN3110对比
FIN3110
功耗:40W
设备尺寸(cm):19.5×21.6×29 重量(kg):12
AN/WSN-5
功耗:440W
设备尺寸(cm):43.9×53.3×117.6
重量(kg):172.7
捷联惯性导航系统的不足
1.惯性仪表直接固联在载体上,直接承受载 体的振动和冲击,工作环境恶劣; 2.惯性仪表特别是陀螺仪直接测量载体的角 运动,要求捷联陀螺有较大的施矩速度和 高性能的再平衡回路; 3.装机标定比较困难,从而要求捷联陀螺有 更高的性能; 4.计算量较大,要求高性能计算机支持;
29
平台控制回路的性能指标(二)
振荡度 定义:平台系统的闭环幅频特性用 表示, 为谐振频率; 为谐振峰值,也称 为振荡度; 振荡度是表示系统动态性能的指标,与时 域设计中的超调量指标相对应; 为了得到更好的系统动态性能,振荡度通 常取1.1~1.5之间。
30
平台控制回路的性能指标(三)
32
捷联惯性导航系统
Strapdown Inertial Navigation System 把惯性仪表直接固联在载体上,用计算机 来完成导航平台的功能的惯性导航系统。
加速 度计
加 速 度 信 息
姿态矩阵
导航计 算机
位置速 度信息 初始参 数信息
控制 显示
陀螺 仪
角 速 度 信 息
姿态矩 阵计算
简单的二维导航系统
一台陀螺仪 两个加速度计 一台计算机
简单的二维捷联导航系统
简单的二维捷联导航参考坐标系
二维系统在旋转坐标系中的导航
捷联式惯导系统与平台式惯导
捷联式惯导系统与平台式惯导
惯导可分为两大类
目前,惯导可分为两大类:平台式惯导和捷联式惯导。
它们的主要区别在于,前者有实体的物理平台,陀螺和加速度计置于由陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;在捷联式惯导中,陀螺和加速度计直接固连在载体上。
惯性平台的功能由计算机完成,故有时也称作"数学平台",它的姿态数据是通过计算得到的。
惯导有固定的漂移率,这样会造成物体运动的误差,因此长射程的武器通常会采用指令、GPS 等对惯导进行定时修正,以获取持续准确的位置参数。
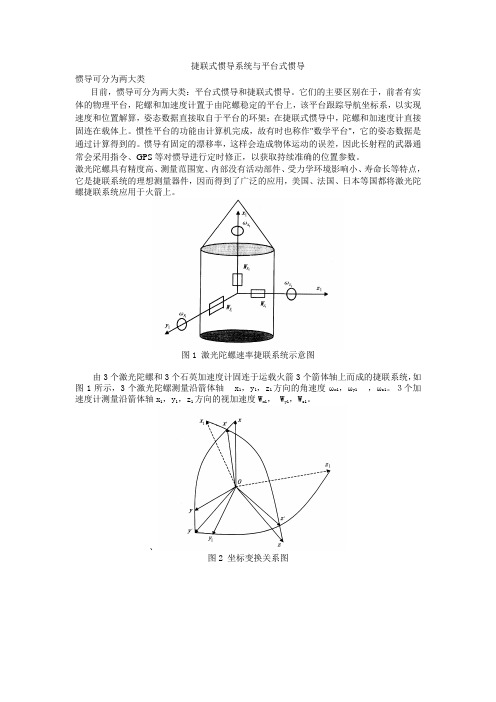
激光陀螺具有精度高、测量范围宽、内部没有活动部件、受力学环境影响小、寿命长等特点,它是捷联系统的理想测量器件,因而得到了广泛的应用,美国、法国、日本等国都将激光陀螺捷联系统应用于火箭上。
图1 激光陀螺速率捷联系统示意图
由3个激光陀螺和3个石英加速度计固连于运载火箭3个箭体轴上而成的捷联系统,如图1所示,3个激光陀螺测量沿箭体轴 x 1,y 1,z 1方向的角速度ωx1,ωy1 ,ωz1。
3个加速度
计测量沿箭体轴x 1,y 1,z 1方向的视加速度W x1, W y1,W z1。
、
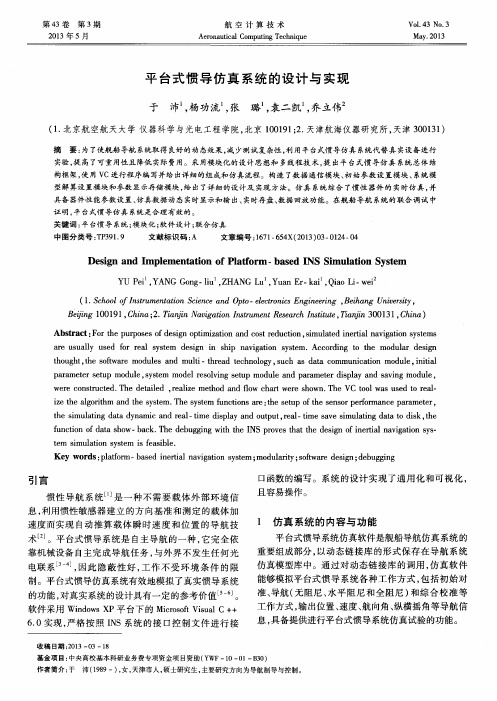
图2 坐标变换关系图。
02-8.2 船用惯导基本原理

速度误差曲线
time(h)
0.2
0
-0.2 0
0.2
5
10
15 20
25 30 35
40 45
50
0
-0.2 0
4
5
10
15 20
25 30 35
40 45
50
3
2
姿态角误差曲线 0
5
10
15 20
25 30
time(h)
35
40
45
50
船用惯导基本原理
➢船用惯导系统误差方程
尽管惯性导航系统的误差会随时间累积,位置误 差甚至达到以海里为单位的量级,但由于其独特的自 主性和安全性,未来很长一段时期内,仍然会是舰船 的核心导航设备。
船用惯导基本原理
➢船用惯导系统误差方程
姿态误差方程:
n n inn inn n
inn
{
VN , VE
RR
ie
sin ,( VE
R
sec2 Ωie
cos)
1 R
tgV
E}
ε n —陀螺漂移
在地理坐标系的投影;
n
平台惯导: n
捷联惯导: n Cbn
Cn b
—船体坐标系到地理坐标系的方向余弦阵。
船用INS/GNSS组合导航技术
船用惯导基本原理
主讲教师:程建华
C
01 船用惯导系统原理及分类
ONTENTS
目
02 船用平台式惯导系统
录
03 船用捷联式惯导系统
04 船用惯导系统误差分析
05 船用惯导系统误差方程
船用惯导基本原理
➢船用惯导系统原理及分类
平台式惯导仿真系统的设计与实现
第4 3卷
第 3期
航 空 计 算 技 术
Ae r o n a u t i c a l C o mp u t i n g T e c h n i q u e
Vo 1 . 43 No. 3 Ma v. 201 3
2 0 1 3年 5月
平 台式 惯 导仿 真 系统 的设计 与 实现
具备 器件性 能参数设 置、 仿真数据动 态实时显示和输 出、 实时存 盘、 数据回放功能。在舰船导航 系统的联合调试 中 证 明, 平 台式惯导仿真 系统是合理有效的 。
关键词 : 平 台惯 导 系统 ; 模 块化 ; 软件设计 ; 联 合 仿 真
中图分 类号 : T P 3 9 1 . 9
p a r a me t e r s e t u p mo d u l e, s y s t e m mo d e l r e s o l v i ng s e t u p mo d u l e a n d p a r a me t e r d i s p l a y a n d s a v i n g mo d u l e, we r e c o ns t r u c t e d. Th e d e t a i l e d, r e a l i z e me t h o d a n d lo f w c h a t r we r e s h o wn . Th e VC t o o l wa s u s e d t o r e a l — i z e t h e a l g o it r hm a n d t h e s y s t e m. Th e s y s t e m f u n c t i o n s a r e: t h e s e t u p o f t h e s e n s o r p e r f o r ma n c e p a r a me t e r ,
第 3期
航 空 计 算 技 术
Ae r o n a u t i c a l C o mp u t i n g T e c h n i q u e
Vo 1 . 43 No. 3 Ma v. 201 3
2 0 1 3年 5月
平 台式 惯 导仿 真 系统 的设计 与 实现
具备 器件性 能参数设 置、 仿真数据动 态实时显示和输 出、 实时存 盘、 数据回放功能。在舰船导航 系统的联合调试 中 证 明, 平 台式惯导仿真 系统是合理有效的 。
关键词 : 平 台惯 导 系统 ; 模 块化 ; 软件设计 ; 联 合 仿 真
中图分 类号 : T P 3 9 1 . 9
p a r a me t e r s e t u p mo d u l e, s y s t e m mo d e l r e s o l v i ng s e t u p mo d u l e a n d p a r a me t e r d i s p l a y a n d s a v i n g mo d u l e, we r e c o ns t r u c t e d. Th e d e t a i l e d, r e a l i z e me t h o d a n d lo f w c h a t r we r e s h o wn . Th e VC t o o l wa s u s e d t o r e a l — i z e t h e a l g o it r hm a n d t h e s y s t e m. Th e s y s t e m f u n c t i o n s a r e: t h e s e t u p o f t h e s e n s o r p e r f o r ma n c e p a r a me t e r ,
惯性导航系统原理_三轴陀螺稳定平台(4)
0 0 1
ωωiirrffxy
ωiaaz
环架角速度
sinθr sinθ f sinθa + sinθr sinθ f cosθa
0 0
cosθr sinθ f sinθa
cosθr
sinθ f
cos
θa
ωωiibbbbyx
0
T3 0
0
ωibbz
基座角速度
2010.05.21
10
5.2.1角速度耦合关系分析
=
−ωωiffixffxcsoisnθθaa
+
ωr iry
cosθ
f
+
ωr iry
cosθ
f
sin θ a cosθa
ωiaaz
ωa iaz
ωωiiaaaaxy
=
ωf ifx
cosθa
−ωiffx sin θa
+
ωf ify
+
ωf ify
sin θ a cosθa
ωiaaz
f
+
ωb ibx
sin
θr
sinθ f
+
ωb ibz
cosθr sinθ f
ωωiiffffyx
=
ωiffz
ωr iry
ωr irx
cosθ f
+ θ&f
+
ωr irz
sinθ
f
−ωirry sinθ f
+
ωr irz
cosθ
f
2010.05.21
ωωiirrrrxy
=
ωibbx
0
sinθ f
平台式惯性导航系统原理及应用
16
第16页/共55页
17
(2)水平和方位修正 四套稳定系统使平台相对
惯性空间保持稳定,为使平 台跟踪地理坐标系,须对平 台实施水平和方位修正。即 利用地理坐标系运动规律给 平台各轴施加指令角速率 (施加到相应的陀螺力矩器 上)。
xt
V
cos
R
VN R
yt
e
cos
VE R
zt
e
sin
成任
8
第8页/共55页
二 平台式惯导的基本组成 平台式惯导系统由三轴陀螺稳定平台(包含陀螺仪)、
加速度计、导航计算机、控制显示器等部分组成。
三 三种平台式惯导的特点(p299)
9
第9页/共55页
10
第10页/共55页
8.2 指北方位惯导系统
指北方位惯导系统是平台惯导中最基本的类型。陀 螺平台建立的理想坐标系与地理坐标系完全重合。这样 的平台需用一个三轴稳定平台,并对两个水平轴进行舒 勒调谐和积分修正控制其在水平面内,对方位轴系统施 以控制信号使其指向北方。
在矩阵计算中,减少繁琐的运算,提高计算性能。
32
第32页/共55页
33
2.地球系与地理坐标系的关系(过程见p312) 这两个坐标系间关系与地理系原点所在经纬度有关,他们间的
电子信息工程学院31因为自由方位平台不施加方位指令dttgcossinsincos电子信息工程学院32cossinsincoscossinsincos为保持平台水平相应的控制指令角速率为电子信息工程学院33自由方位惯导系统原理电子信息工程学院34游动方位惯导系统与自由方位类似使平台的台面处于当地水平面方位轴只跟踪地球自转的分量
F惯
F弹
mgm
aip
第16页/共55页
17
(2)水平和方位修正 四套稳定系统使平台相对
惯性空间保持稳定,为使平 台跟踪地理坐标系,须对平 台实施水平和方位修正。即 利用地理坐标系运动规律给 平台各轴施加指令角速率 (施加到相应的陀螺力矩器 上)。
xt
V
cos
R
VN R
yt
e
cos
VE R
zt
e
sin
成任
8
第8页/共55页
二 平台式惯导的基本组成 平台式惯导系统由三轴陀螺稳定平台(包含陀螺仪)、
加速度计、导航计算机、控制显示器等部分组成。
三 三种平台式惯导的特点(p299)
9
第9页/共55页
10
第10页/共55页
8.2 指北方位惯导系统
指北方位惯导系统是平台惯导中最基本的类型。陀 螺平台建立的理想坐标系与地理坐标系完全重合。这样 的平台需用一个三轴稳定平台,并对两个水平轴进行舒 勒调谐和积分修正控制其在水平面内,对方位轴系统施 以控制信号使其指向北方。
在矩阵计算中,减少繁琐的运算,提高计算性能。
32
第32页/共55页
33
2.地球系与地理坐标系的关系(过程见p312) 这两个坐标系间关系与地理系原点所在经纬度有关,他们间的
电子信息工程学院31因为自由方位平台不施加方位指令dttgcossinsincos电子信息工程学院32cossinsincoscossinsincos为保持平台水平相应的控制指令角速率为电子信息工程学院33自由方位惯导系统原理电子信息工程学院34游动方位惯导系统与自由方位类似使平台的台面处于当地水平面方位轴只跟踪地球自转的分量
F惯
F弹
mgm
aip
03-导航学(第三章)惯性导航系统
p ω 将按 ip 的三个分量计算形成的电信号分别送给平台
上相应的陀螺力矩器,就能实现p系对n系的跟踪。
2018/11/24 18/145
§ 3.2 平台式惯导系统的基本原理
3.2.2 水平指北方位惯导系统机械编排方程 2. 地理速度计算
n n n n ven f n (2ωie ωen ) ven gn
§ 3.2 平台式惯导系统的基本原理
3.2.2 水平指北方位惯导系统机械编排方程
4. 姿态角的获取 由于平台坐标系模拟了当地地理坐标 系,故从平台框架上角度传感器(同步 器)就可以直接取得载体的航向角、俯 仰角和横滚(倾斜)角信号。
2018/11/24
21/145
§ 3.2 平台式惯导系统的基本原理
对该微分方 程式进行求解, 即可得到运载体 在地理坐标系的 速度。
2018/11/24
19/145
§ 3.2 平台式惯导系统的基本原理
3.2.2 水平指北方位惯导系统机械编排方程 3. 纬度、经度和高度计算
L Rm n n vx enz Rn cos L sin L h vzn v
L L0 vx dt 0 R t vy
t
0
2018/11/24
0
R cos L
dt
5/145
§ 3.1 概 述(2013-11-22)
• 惯性导航系统通常由以下几个部分组成:
– – – 加速度计 用来测量载体运动的加速度。 惯导平台 模拟一个导航坐标系。 导航计算机 完成导航计算和平台跟踪回路中 指令角速度信号的计算。 – 控制显示器 给定初始参数及系统需要的其他 参数,显示各种导航信息。
§3.7平台式惯导的基本原理
(2) 内环坐标系 OX Y pi piZpi (下标 pi 表示 pitch) ,简称 pi 系,与内环 固联, Zpi 轴为平台方位轴(同 Zp 轴) , X pi 轴沿平台内环轴(俯仰(纵 摇)轴)指向平台右侧, Ypi 与 X pi 、 Zpi 垂直构成右手直角坐标系。
(3) 外环坐标系 OXrYrZr (下标 pi 表示 roll),简称 r 系,与外环固连, X r 轴沿平台内环轴指向平台右侧 (同 X pi 轴) ,Yr 轴沿平台外环轴(横 滚(横摇)轴)指向平台前方, Zr 与 Xr 、Yr 垂直构成右手直角坐标系。 由于外环平面与内环平面不一定垂直,Zr 轴与方位轴指向并不始终一 致。
基座
外环
内环轴摩擦 内环 方位轴摩擦
刚性约束
刚性约束
刚性约束
方位环(台体)
2 惯性导航系统实现的基本思路 从加速度计的原理可知,加速度计的输出是沿加速度计敏感轴方
向的比力,比力中含有载体绝对加速度信息。如果在载体上能得到三
个敏感轴互相正交的加速度计输出信号同时又能获知各加速度计敏
感轴的准确指向的话,就可以完全掌握载体的运动加速度,结合载体
动,通过计算得到载体的姿态角,也就确定出了加速度计敏感轴的指
向。再通过坐标变换,将加速度计输出的比力信号转换到一导航计算
比较方便的导航坐标系上,进行导航计算。这种系统就是捷联式惯导
系统。该系统由于没有平台实体,结构简单、体积小、维护方便;但
惯性元件直接装在载体上,工作环境恶劣,对元件要求很高。同时,
导航系统要求其三轴平台相对惯性空间稳定,即平台工作于几何稳定 状态;有的惯性导航系统要求其三轴平台在保持稳定的同时还要跟踪 某个导航坐标系,即平台工作于空间积分状态。三轴平台可以看成是 由三个单轴陀螺稳定平台组合而成,单轴平台的工作原理、系统的基 本组成和传递函数、系统的性能指标等内容都适用于三轴平台。但三 轴平台不是三个单轴平台简单的叠加,三轴平台由于其结构和工作原 理方面的特点,在实现平台的稳定和修正两种工作状态时,有许多特 殊问题。如陀螺仪信号的合理分配,基座转动角速度到平台的耦合与 隔离,三轴平台的环架锁定等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Lecture 6 -- Basic types of INS
16
4.3 重力加速度的分量
当载体从 A 移动到 B,
重力加速度 g 的分量
gx
g
x Rh
gy
g
y Rh
gz
g
R Rh
ZP
x
ZP
A
XP
gx
XP
B
g
gz
g 的大小也和载体距地面的高度有关
g
g0
R2 (R h)2
Lecture 6 -- Basic types of INS
2
1.0 惯导系统的任务
platform
a x X Acc. a x V x
Sx
ay
ay
Vy
Y Acc.
Sy
vehicle
导航过程中, 平台必须模拟坐标系 XY, 这是借助 于陀螺仪实现的.
所有惯导系统都需要解决的两个问题:
利用陀螺仪建立信号测量基准.
对加速度计的输出进行积分,获取速度和位置.
ZP
XP
ZP
A
XP
B
Lecture 6 -- Basic types of INS
15
4.2 基于惯性系的导航: 缺点
缺点
对于地球表面的导航:
为了获取载体相对地球的位 置和速度,需要进行变换
ZP
XP
ZP
A
XP
B
重力加速度 g 相对平台的方向在不断改变,因此沿着三个加 速度计敏感轴方向的 g 的分量也不断在变,必须实时计算.
Lecture 6 -- Basic types of INS
9
3.5 东向修正回路
M2
t
VN(t)VN00(ANAN)B dt
AX
(t)0R 1 0tVN(t)dt
GZ
YP
GX
CE
VN R
M3 XP
GY AY
VN dt
ANB
VN0
1
VN R
dt
(t )
0
CE 1
M1
Lecture 6 -- Basic types of INS
13
Outline
惯导系统的分类 基于当地地理坐标系的INS -- 稳定与修正 基于惯性坐标系的INS – 重力补偿 框架系统
Lecture 6 -- Basic types of INS
14
4.1 基于惯性系的导航
选取惯性坐标系为导航坐标系 : 平台相对惯性空间稳定
优点 平台只需要稳定 加速度计的输出中不含有 害加速度
10
3.6 北向修正回路
M2
AX
GZ
YP
e cos
AEB
VE dt
CN
CNVRE ecos
1/ R
0
1
V E R cos dt (t)
GX
VE0
M3 XP
GY AY
VN dt
ANB
VN0
1
VN R
dt
(t )
0
CE 1
M1
Lecture 6 -- Basic types of INS
8
3.4 平台修正(跟踪)
e
N
VN
R
E
VE
地理坐标系相对惯性空间的旋转
E
VN R
N
VE R
e
c
os
VREtgesin
为了使平台跟踪地理坐标系,应使 其以同样角速度相对惯性空间旋转。
控制电流施加到陀螺仪上, 使它们产生相应的进动。
陀螺仪的进动通过电机被 传递给平台, 使得平台跟踪 地理坐标系 (平台的修正)
Lecture 6 -- Basic types of INS
7
3.3 坐标变换器
M2
当载体旋转
M1
AX
GZ
YP
GX
M3 XP
GY AY
outer ring outer ring axis
AX
GZ
YP
GX
?
XP
GY AY
需增加坐标变换器实现切换
M2 M1
Lecture 6 -- Basic types of INS
4
Outline
惯导系统的分类 基于当地地理坐标系的INS -- 稳定与修正 基于惯性坐标系的INS – 重力补偿 框架系统
Lecture 6 -- Basic types of INS
5
3.1 惯性平台 – 立体示意图
放大、校正
内环
电机
传感
传感 外环
电机
台体 台体轴
电机
Lecture 6 -- Basic types of INS
17
4.3 重力加速度的分量
则
gx
g0
R2x (Rh)3
gy
g0
R2y (Rh)3
gz
g0
R3 (Rh)3
并假设 h << R
gx
g0
x R
gy
g0
y R
gz
g0
2z R
g0
g 的分量取决于载体的位置 x, y 和 z
Lecture 6 -- Basic types of INS
18
4.4 测量和计算
fX(t)
xg0
x R
fY
(t)
yg0
y R
fZ(t) z g02Rzg0
t
x(t)x00VX(t)dt
t
y(t)y0 0VY(t)dt
t
Lecture 6 -- Basic types of INS
3
2.0*惯导系统的分类
依据对导航坐标系的选取和实现方式
平台式 INS
捷联式
选取惯性坐标系为导航坐标系 选取地球坐标系为导航坐标系 选取地理坐标系为导航坐标系 自由或游动方位的水平坐标系
同上
力学编排
Lecture 6 -- Basic types of INS
Platform Inertial Navigation System
平台式惯导系统
Lecture 6 -- Basic types of INS
1
Outline
惯导系统的分类 基于当地地理坐标系的INS -- 稳定与修正 基于惯性坐标系的INS – 重力补偿 框架系统
Lecture 6 -- Basic types of INS
6
3.2 平台稳定回路
当惯导平台跟踪当地地理坐标系时需要有稳定回路和修正回路
M2
AX
GZ
YP
GX
M3 XP
GY AY
稳定回路的机制:
当平台绕外框架轴旋转 (由于 干扰影响) 陀螺仪 Gy 进动并有输出
Gy 的输出被送到电机 M2 M2 驱动平台转回原来位置
M1
outer ring outer ring axis
11
3.7 方位修正回路
M2
AX
GZ
YP
C
AEB
e
sin
C
tan/ R
VREtgesin0 Nhomakorabea1
VE dt
V E R cos
dt (t)
GX
VE0
M3 XP
GY AY
VN dt
ANB
VN0
1
VN R
dt
(t )
0
CE 1
M1
Lecture 6 -- Basic types of INS
12
3.8*总结: 修正回路工作过程
加速度计 输出
有害加速度 补偿
一次 积分
M2
计算地理坐标系相对 惯性空间的旋转角速度
AX
陀螺力矩器
GZ
YP
GX
平台转动 力矩电机
陀螺进动
M3 XP
GY AY
VN
dt
ANB
VN0
1
VN R
dt
(t )
0
CE 1
M1
Lecture 6 -- Basic types of INS