分布式全电动注塑机控制系统
注塑机电气控制系统设计
目录注塑机简介 (2)1.课程设计要求 (3)1.1 任务描述 (3)1.2 控制任务和要求 (3)1.3 设计任务 (3)2.总体方案 (3)2.1 控制对象描述 (3)2.2 控制方案 (4)3.硬件设计 (5)3.1 PLC元件选择 (5)3.2 PLC外部接线 (6)3.3 I/O分配表 (7)4.软件设计 (8)4.1系统顺序功能图 (8)4.2梯形图设计 (9)4.3系统调试 (14)设计总述 (14)设计体会 (14)参考目录 (15)课题: 注塑机电气控制系统设计注塑机概况简介:启动按钮SB与安全限位开关SQ1闭模终止限位开关SQ2射台前进终止限位开关SQ3延时t 秒延时t 秒加料限位开关SQ4射台后退限位开关SQ5开模终止限位开关SQ6顶针前进终止限位开关SQ7顶针后退终止限位开关SQ8射台前进射台后退顶针后退顶针前进复 位开 模预 塑保 压注 射闭 模原 点YV1YV2YV3YV4YV5YV6YV7YV8.......................图1 注塑机工作流程图12图1 注塑机工作流程图注塑机用于热塑性塑料的面型加工,注塑机籍助8个电磁阀YV1~YV8完成闭模、射台前进、注射、保压、预塑、射台后退、开模、顶针前进、顶针后退、复位等工序,其中注射和保压工序需要延时一定的时间。
图1是注塑机工作流程,YV3动作;在射台向前工序,YV8动作,在其余工序,电磁阀的动作顺序以此类,其中,t1=1s,t2=2s。
1.课程设计要求1.1任务描述注塑机用于热塑料加工,是典型的顺序动作装置,它借助8个电磁阀YV1~YV8完成闭模、射台前进、注射、保压、预塑、射台后退、开模、顶针前进、顶针后退和复位等操作工序,其中注射和保压工序需要一定时间延迟。
1.2控制任务和要求①按照注塑机工艺流程图完成顺序控制。
②注塑机工作时有通电指示。
③在进行开模工序、闭模工序时有工序状态指示。
♍在原点时有位置指示灯。
分布式全电动注塑机控制系统
cnr ls se fal— e cr M M (net g o to y tms o l l ti I e c i ci i n
m odn a h n ) l i g m c i e .De a l d i t o u e it i u e t i n r d c d d s rb t d e s s e c mp s d o a i u o e sn lc i . o y t m o o e f v r s n d i g e h p Pr — o
参 考文献 :
[ 3 L ro n u . s n ad cnrl fat ema n t 1 asn e rR Dei n o t ci g e c g oo v i bai ytmsfrhg p e oain D] Z r h er gs se o i s ed rtt [ . ui : n h o c
man t er g [ ] E ui , w t r n : d g ei bai s Z . TH z r h S i el d v f c n c z a
[ ] Aks i , r r T, ma uh S Virt ncn 2 i t S Moi a Ha g e i . b ai o — ha mu o
to fma n t al u p n e lx b er t r b h Ie r l g e i ly s s e d d f i l o o y t e£ o c e s
收 稿 日期 :0 6 2—1 20 —1 7 基 金 项 目 : 省 科 技 计 划 项 目资 助 (0 5 1 2 1 1 ) 广东 2 0 B 0 0 0 0
图 l 单 片 机 分 布 式 控 制 系 统
t o fma n t e r g s s e c i vn o a i n a r lo g e i b a i y t msa h e i g a r t to — c n
基于plc的注塑机控制系统设计

目录摘要 (Ⅰ)第一章注塑机简介 (1)1.1 注塑机的发展趋势 (1)1.2 注塑机的使用 (1)1.3 注塑机的工作过程 (2)第二章可编程控制器简介 (3)2.1 PLC的基本特点 (3)2.2 PLC机型及I/O点数的选择 (3)2.2.1 PLC机型的选择 (3)2.2.2 PLC的I/O点数的选择 (4)第三章 S-2Y-250A型注塑机的设计 (5)3.1 注塑机控制系统的主电路图 (5)3.2 XS-2Y-250A型注塑机工作流程 (6)3.2.1 PLC程序的顺序控制设计法 (6)3.2.2 顺序控制设计法的设计步骤 (7)3.3 注塑机控制系统的输入输出分配表 (8)3.4 注塑机控制系统的语句表 (10)3.5 注塑机控制系统的梯形图 (12)结束语 (18)参考文献 (19)摘要注塑机控制系统是注塑机整机的一个重要组成部分,其性能优劣对整机至关重要。
本论文主要阐述了XS-ZY-250A型注塑机的机电系统控制问题。
采用PLC来实现对注塑机各动作的控制。
确定了PLC输入和输出接口的属性,将注塑机的所有检测开关、限位开关、手动操作开关和主令开关等,进行确切地分类和编号,从而确定了I/O口的数量。
根据输入输出的数量、类型确定PLC的型号为西门子S7-200型。
软件设计方面,根据注塑机各个动作制出注塑机的工艺流程图。
根据此工艺流程图,设计出注塑机的动作流程图,根据动作流程图写出注塑机的状态转移图,并依据状态转移图写出步进梯形图,实现注塑机动作程序控制,将模糊控制等先进控制理论应用到注塑机料筒温度控制中,并在注塑机全电气化方面作了一些有益的尝试。
关键词:注塑机;PLC;自动控制系统第一章注塑机简介1.1注塑机的发展趋势注塑机是注塑成型的主设备,注塑机的技术参数和性能与塑料性质和注塑成型工艺有着密切的关系。
注塑成型设备的进一步完善和发展必将推动注塑成型技术的进步,为注塑制品的开发和应用创造条件。
注塑机计算机控制系统技术条件
注塑机计算机控制系统技术条件注塑机计算机控制系统是指利用计算机技术对注塑机进行全面控制和管理的系统。
现代注塑机计算机控制系统技术已经得到了广泛应用,大大提高了注塑机的生产效率和产品质量。
以下是注塑机计算机控制系统的技术条件介绍。
1.数据采集和处理能力:注塑机计算机控制系统需要能够实时、准确地采集和处理各种数据,包括温度、压力、流量、速度等。
2.高精度的测量和控制技术:注塑机计算机控制系统需要具备高精度的测量和控制技术,能够实时检测和调整注塑机各部件的状态和参数,确保注塑过程的稳定性和一致性。
3.全面的参数监控和报警功能:注塑机计算机控制系统需要具备全面的参数监控和报警功能,能够及时发现并报警异常情况,保障生产的安全和稳定。
4.智能化的操作界面:注塑机计算机控制系统需要拥有智能化的操作界面,能够简化操作流程,提高操作效率,并能够进行参数设置和历史数据查询。
5.数据存储和分析功能:注塑机计算机控制系统需要具备数据存储和分析功能,能够将历史生产数据进行存储和分析,为生产管理和质量控制提供依据。
6.网络通信和远程监控功能:注塑机计算机控制系统需要具备网络通信和远程监控功能,能够通过互联网对注塑机进行远程监控和控制,提高生产管理的便捷性和灵活性。
7.可编程控制和自动化技术:注塑机计算机控制系统需要具备可编程控制和自动化技术,能够实现自动化生产和控制,提高生产效率和产品品质。
8.系统的稳定性和可靠性:注塑机计算机控制系统需要具备良好的稳定性和可靠性,能够在长时间运行和恶劣环境下正常工作,保障生产的连续性和稳定性。
总之,注塑机计算机控制系统技术条件需要满足数据采集和处理能力强、高精度测量和控制、全面的参数监控和报警、智能化操作界面、数据存储和分析、网络通信和远程监控、可编程控制和自动化技术、系统的稳定性和可靠性等要求。
这些要求的实现,将有助于提高注塑机的生产效率和产品质量,满足市场需求。
注塑机的结构和功能
注塑机的结构和功能注塑机是一种用于塑料成型的机器设备,通常用于生产各种塑料制品,例如塑料瓶子、塑料盖子、塑料容器、塑料玩具等等。
它的主要结构由注塑系统、电气控制系统、液压系统、冷却系统等组成。
以下是详细的注塑机结构和功能介绍。
1. 注塑系统注塑系统是注塑机的核心部件。
它由注塑机的主要部件组成,包括注射缸、螺杆、喷嘴、加热器和温控器。
注塑系统的功能是将塑料原料送入注射缸中,通过加热和高压力,使塑料原料融化并推入模具中。
注塑系统的质量直接决定了注塑机的精度和效率。
因此,注塑系统的材料和制造工艺非常重要。
2. 电气控制系统电气控制系统是注塑机的重要组成部分,它由控制面板、电子传感器、电机和电器设备组成。
电气控制系统的主要功能是控制注塑机的各项操作,例如升降模、开关摆臂、启动离合器、加温等。
电气控制系统还可以采集注塑机的工作数据,并对它进行分析和处理,从而实现生产优化和自动化控制。
3. 液压系统液压系统是注塑机的重要组成部分,它主要由充油箱、液压泵、液压马达、液压阀、油压计等组成。
它的主要功能是为注塑系统提供高压液压力,以促使注塑杆移动,在模具中注射熔融的塑料原料。
液压系统的质量是注塑机精密控制的关键,因此它的结构和制造工艺必须保证高质量和可靠性。
4. 冷却系统冷却系统是注塑机中的另一个重要部分。
它主要由冷却器、水泵、喉管等组成。
冷却系统的主要功能是为注塑模具提供冷却水,以防止塑料制品变形和缩水。
同时,它还可以在注塑过程中提高生产效率和减少周期时间。
冷却系统的稳定性和性能也直接影响塑料制品的质量。
总的来说,注塑机是一个非常重要的生产工具,从结构和功能上看,它非常复杂和精密。
注塑机的高质量和稳定性使得它可以满足各种不同的生产需求,并且可以生产各种不同的塑料制品。
注塑机是现代工业生产中不可或缺的机器之一,能够大大提高生产效率和产品质量,具有广泛的应用前景。
应用PLC技术改造注塑机的控制系统

应用PLC技术改造注塑机的控制系统PLC (可编程逻辑控制器) 技术是一种广泛应用于自动化控制系统中的技术。
在注塑机控制系统中应用PLC技术可以提高注塑机的性能和生产效率。
下面将介绍应用PLC技术改造注塑机控制系统的优势和步骤。
应用PLC技术可以提高注塑机的稳定性和精确性。
传统的注塑机控制系统使用开关、继电器和电气元件进行控制,容易引起电气干扰和控制误差。
而PLC技术可以通过逻辑程序控制,减少电气干扰,提高控制精确度,使注塑机的运行更加稳定和可靠。
应用PLC技术可以实现注塑机的自动化控制。
通过PLC编程,可以实现对注塑机的自动开启和关闭,自动调节注塑机的温度、压力和流量等参数,实现注塑机的自动化生产。
这不仅减少了人工操作的劳动强度,还提高了生产效率和产品质量。
PLC技术具有良好的扩展性和可编程性。
PLC控制器可以根据注塑机的不同需求进行编程,实现各种功能和操作模式的切换。
可以实现不同工艺的选择,不同型号产品的生产等。
这种灵活性和可编程性使得注塑机的应用范围更广,适应性更强。
第一步,进行控制系统的设计。
根据注塑机的工作原理和要求,确定需要控制的参数和功能,设计PLC控制程序。
第二步,选购适合的PLC控制器和相关的传感器和执行器。
根据注塑机的规模和要求,选购符合要求的PLC控制器和其他控制元件。
第三步,进行接线和布线工作。
根据PLC控制器和其他控制元件的接口要求,进行接线和布线工作,确保各个元件之间的正确连接。
第四步,进行PLC编程。
按照设计的控制程序,进行PLC编程工作,包括输入输出的定义、逻辑程序的编写和测试等。
第五步,进行系统调试和测试。
在完成PLC编程后,进行系统调试和测试,验证控制系统的功能和性能。
进行现场应用。
在完成调试和测试后,将改造好的控制系统安装到注塑机上,并进行现场应用。
在应用过程中,可以根据实际需求进行调整和优化,以达到最佳的控制效果。
应用PLC技术改造注塑机的控制系统可以提高注塑机的稳定性和精确性,实现注塑机的自动化控制,具有良好的扩展性和可编程性。
注塑机电气控制系统
第七章注塑机电气控制系统第一节概述注塑机控制系统是一套以控制器为控制核心,包括各类电器、电子元件、仪表、加热器、传感器等组成,与液压系统配合,正确实现注塑机的压力、温度、速度、时刻等各工艺进程和调模、手动、半自动、全自动等各程序动作的系统设备。
控制系统在注塑机中以独立部份而存在。
从控制系统的质量将直接影响产品的成型质量,例如对合模速度、低压模保、及模具锁紧力的控制,将影响产品的成型周期、靠得住的低压模保(模具保护)、准确的开模定位等等。
另一个需要精准控制,是影响注塑成型工艺条件的注射速度、保压压力、螺杆转速及料筒的温度等。
例如,由于原料的热性能不同对料筒的温度控制提出苛刻要求,要有合理的控制系统来实现。
从当前塑机进展来看,用户的要求愈来愈高,各类特殊机、专用机愈来愈多,要求生产厂要作到多样化个性化,这些目标的实现,要依赖于注塑机控制。
例如,此刻塑机依赖控制系统提供高精度的控制,需要大容量、高响应速度的控制器,要实现闭环控制,利用的就是西门子公司生产的S7-300可编程控制器,还有的要用到变频器、饲服控制卡等控制设备。
随着运算机技术、通迅技术、网络技术的进展,未来的塑机操作将趋向简便化、智能化、系统化、网络化方面进展,对控制系统提出更高的要求。
一、控制与调节基础知识1.自动控制系统概念自动控制是在无人直接参与条件下,利用控制器使被控对象(如机械、设备和生产进程)的物理量或工作状态能自动地依照预定的规律转变或运行。
解自动控制系统的结构,以对液面高度控制为例,如图7-1所示。
若人参与系统控制,应起哪些作用,如图7-2所示。
为控制要求液面的高度为h0,人要不断地将液面的实际高度与要求液面高度作比较,按照比较的结果,调节其进水阀V2开度,以维持液面的高度不变。
图7-2 液面人控制系统框图由该图知,人在控制中起的作用:(1)测量实际液面的高度h1——用眼睛。
(2)将测得实际液面的高度h1与要求液面高度h0进行相较较——用脑。
注塑机计算机控制系统通用技术条件
注塑机计算机控制系统通用技术条件注塑机是一种常用的塑料加工设备,广泛应用于制造各种塑料制品。
而计算机控制系统作为注塑机的关键部分,起着至关重要的作用。
本文将从功能、性能和可靠性三个方面,介绍注塑机计算机控制系统的通用技术条件。
一、功能要求1. 数据采集与处理:注塑机计算机控制系统能够实时采集和处理相关参数,如温度、压力、速度等,确保注塑过程的稳定性和准确性。
2. 运动控制:能够精确控制注塑机各个运动部件的运动轨迹、速度和力度,确保注塑产品的质量和一致性。
3. 工艺参数调整:能够根据不同的注塑工艺要求,调整注塑机的参数,如温度、注射速度、保压时间等,以满足不同产品的生产需求。
4. 故障诊断与报警:能够自动诊断注塑机运行中的故障,并及时发出报警信号,以保障生产的连续性和安全性。
二、性能要求1. 精度要求:注塑机计算机控制系统需要具备较高的控制精度,能够满足不同产品的尺寸和质量要求。
2. 响应速度:注塑机计算机控制系统需要具备快速的响应能力,能够及时调整和控制注塑机的运动状态,以保证产品的一致性和稳定性。
3. 稳定性:注塑机计算机控制系统需要具备良好的稳定性,能够长时间稳定运行,不受外界干扰影响。
4. 可靠性:注塑机计算机控制系统需要具备高可靠性,能够确保长时间、高效率的运行,减少故障和停机时间。
三、可靠性要求1. 硬件可靠性:注塑机计算机控制系统的硬件部分需要采用可靠的元器件和设备,具备良好的抗干扰和抗干扰能力,以确保系统的稳定运行。
2. 软件可靠性:注塑机计算机控制系统的软件部分需要具备高可靠性,能够进行故障自诊断和自恢复,以减少停机时间和维修成本。
3. 安全性:注塑机计算机控制系统需要具备良好的安全性能,能够监控注塑机的运行状态,及时发现并处理可能的安全隐患,确保操作人员的安全。
注塑机计算机控制系统通用技术条件包括功能要求、性能要求和可靠性要求三个方面。
通过实现数据采集与处理、运动控制、工艺参数调整和故障诊断与报警等功能,满足不同产品的生产需求。
全电机注塑机控制原理
一、全电动注塑机机械原理1、开模、锁模、顶针等动作采用高精度丝杠螺母,传动精度0.01mm。
2、直线导轨,将传统往复滑动引导转变为滚动引导,提高定位精度,降低机械造价并且大幅度节省电力,可长时间维持高精度。
3、采用新型测力传感器,准确控制背压取得稳定的精密注塑。
4、同步带轮及同步带,结构简单、安装方便、传动精度高,噪声低。
5、采用集中式润滑,容积式比例分配器,保证每点润滑充分。
就上述所说的零件除外还有注塑机器机械原理。
止逆环(过胶圈)---顾名思义,止逆环的作用就是止逆。
它是防止塑料熔体在注射时往后泄漏的一个零件。
射嘴----射嘴是联接料筒和模具的过渡部分。
法兰------法兰是连接射嘴与机筒的零件?在塑料的塑化注射过程中只起通道的作用。
加料斗-----加料斗是储存塑料原料的部件,也有的在加料斗上加上发热和吹风装置做成干燥料斗二、全电动注塑机电控原理伺服系统:是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
锁模伺服电机三、伺服电机的工作原理:伺服电机是一个典型闭环反馈系统,减速齿轮组由电机驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动电机正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服电机精确定位的目的。
四、伺服电机的控制:标准的伺服电机有三条控制线,分别为:电源、地线及控制。
电源线与地线用于提供内部的电机及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服电机会产生噪音)。
甚至小伺服电机在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。
宝捷信注塑机控制系统说明书
1套 可选配
P S8 20 A M 2 7 / 28 + 10 + 3路 电子 尺+3路 压 力检测 1套
2 .键 盘
B K1 18 (单色) 5 . 7 "3 2 0*24 0 B K1 18 (彩色) 6 . 0 "6 4 0*48 0
1套 1套 可选配
PW300 3 .开 关电源
PW600
300W 600W
C AN_ BUS 1 C AN_ BUS 2
R U N系统运行
+24V
0
X 0 0 安全门前
1 X 0 1 马达起动毕
2
X 0 2 射胶保护罩
3 X 0 3 锁模停止
4
X 0 4 电眼输入
5 X 0 5 熔胶转速
6
X 0 6 射台前停
7 X 0 7 射台后停
XCOM
0 X 1 0 备用
1
X 1 1 备用
R
6
BK118 使用说明书 V3.0
第一章 系统配置及安装
3.2 控制系统检查
(1) 安装完毕后,进行全面检查,包括开关电源、主机箱、电热输出线路、键盘 热电偶等所有连线是否连接牢固。
( 2) 完 成线路 检查 后,进 行通 电检 查,先 把 直 流电源 输 出 端即电 源盒1 1位输出 线 插头取出,然后通电检查,测量各电压是否与其标值相同,观察电源盒输出 指示灯是否正常。
1套 可选配
1套
4 .通 信电缆 D B- 15 F
1米 至8米可选
1套
2. PS820AM 控制系统特点
全 计算 机控 制 所有 功能及 温度 采 用高 亮度L C D液晶 显示 画 面,6 40* 4 8 0点6. 0寸/ 7 . 5寸彩 色(选 用) 系 统采 用双3 2位C PU设计 , 运 算速度快 , 控制 精确 , 稳定 性高 控 制主 机采 用 模块 化设计 ,安 装省时 ,维 修迅速 具 备 Real T i me 功 能, 可实 时 显示日 期 和 时间 具 备屏 幕保 护 功能 ,屏幕 保护 时间内 未 进 行任何键 盘操作 时自 动O FF 8 0组模 具资 料 储存 ,可中 、英 文输入 模具 名称,实 时 操作 帮助 密 码设 定及 资 料锁 定,可 避免 操作者 任意 更改成型 资 料, 影响 产 品品 质 多 语言 文字 可 选择,实时 动态 显示 包 装模 数设 定 功能 ,产量 可设 定六位 数 多 种 中 子及 绞 牙 程 序, 适 合不 同类型 的中 子和绞牙 控 制 比 例微 积分 (P ID) 自学 习 温度 控制,6 +1段 温度 射 咀温 度可 开 环或 闭环控 制 温度可一周 预约定时加热, 操作更便利 多 种行 程控 制 方式 ,行程 开关/ 3路编 码 器/电 子尺 (选 用 ) 多 种射 出方 式 ,4段射出 ,3级 保 压 自 我 故 障检 测 、 报 警显 示 及 语 音 提示 等 功 能 输 入、 输出 皆 有LE D指示 灯,检 测维护 很方 便 输 入、 输出 采 用光 藕合电 路, 可隔离 外部 线路干扰 检 示画 面可 检 查所 有输入 、输 出点及 按键 的动作状 态 3路 标准D/A比 例 输出,最 大 电流 输出3 A 压 力、 流量 、 背压 数字 化 预调 ,适合 各种 厂牌的 比 例 阀, 更好 的 线性 比例 具 有远 程通 讯 功能 ,可为 用户 远距离 编写 程序以 及 更 换不 同版 本 软件 由 一台 计算 机 主机 连网管 理25 5台注塑 机生 产,能 准确 统计每 台 机 生产 情 况 , 生产 数 据 打 印, 方 便管 理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绝大多数注塑机采用液晶显示器作为人机对话 的媒 介 。人 机 界 面 的 具 体 设 计 包 括 输 入 键 盘 和 L CD 液晶显示器 ,如图 1 所示由 # 01 单片机控制 。 人机界面结构如图 2 所示 。
2. 2 伺服控制单元 伺服控制单元就是控制伺服电机单元 ,包括射
台移动伺服单元 、顶针进退伺服单元 、射胶伺服单元 和预塑伺服单元 、开模/ 锁模伺服单元和调模伺服单 元 。如图 1 所示分别由 # 01 、# 02 和 # 03 单片机控 制 。 # 01 单片机控制结构如图 3 所示 。
sympo sium o n magnetic bearings [ Z ] . Tokyo ,J apan : N ISSEI Eblo ,1990. [ 8 ] (日) 藤他卡喜 ,陈清山 ,等. 日本最新线性集成电中手 册[ M ] . 湖南 :中南工业大学出版社 ,1986.
作者简介 :刘晓军 (1966 - ) ,男 ,湖北武汉人 ,博士的原理与开发应用 [ M ] . 北 京 :电子工业出版社 ,1997.
[ 4 ] Hampto n R D , Kno spe C R. Extended H2 synt hesis for multiple degree of f reedom cont rollers [ Z ] . 363 383.
图 3 伺服控制单元
# 02 和 # 03 单片机伺服单元控制方式与 # 01 单片机类似 。P0 口作数据总线 ,用来扩展输入点 , 检测位移传感器 、机械零点以及到位信号 ; P2. 0~ P2. 5 用来选通外部扩展 ,P2. 6 和 P2. 7 作为虚拟的 I2 C 总线 ; P1 口用来检测伺服驱动单元的反馈信号 以及对伺服驱动的控制 。 2. 3 温度控制单元
在采用 I2 C EEPROM 存储液晶显示所使用的 汉字库和其它字符库 ,以及用于 # 01~ # 04 单片机 通讯用的数据交换区域 。将 # 01~ # 04 单片机以 及 I2 C E2 PROM 一起挂接在虚拟的 I2 C 总线上实 现 多 机 通 讯 。 E2 PROM 采 用 的 8 kB ×8 bit A T24C64 。
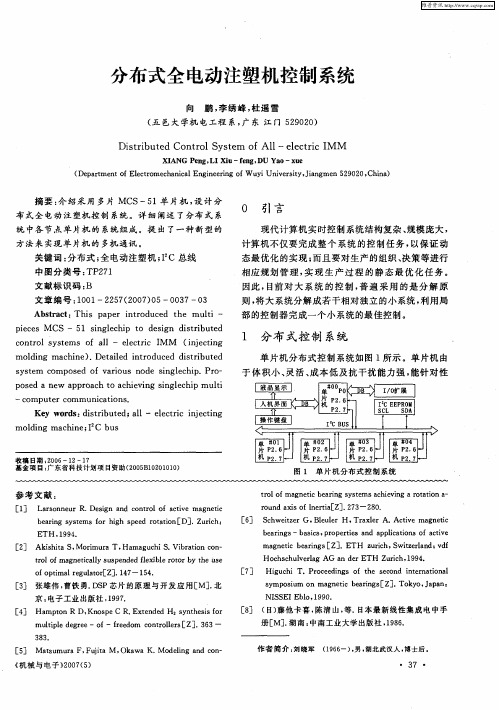
摘要 :介绍采用多片 MCS 51 单片机 ,设计分 布式全电动注塑机控制系统 。详细阐述了分布式系 统中各节点单片机的系统组成 。提出了一种新型的 方法来实现单片机的多机通讯 。
关键词 :分布式 ;全电动注塑机 ; I2 C 总线 中图分类号 : TP271 文献标识码 :B 文章编号 :1001 2257 (2007) 05 0037 03 Abstract : This paper int ro duced t he multi pieces MCS 51 singlechip to design dist ributed co nt rol systems of all elect ric IMM ( injecting molding machine) . Detailed int roduced dist ributed system co mpo sed of vario us no de singlechip . Pro2 po sed a new app roach to achieving singlechip multi co mp uter co mmunicatio ns. Key words : dist ributed ; all elect ric injecting molding machine ; I2 C bus
分布式全电动注塑机控制系统
向 鹏 ,李绣峰 ,杜遥雪 (五邑大学机电工程系 ,广东 江门 529020)
Dist ributed Co nt rol System of All elect ric IMM
XIANG Peng ,L I Xiu feng ,D U Yao xue (Depart ment of Elect ro mechanical Engineering of Wuyi U niversity ,Jiangmen 529020 ,China)
·38 ·
图 4 温度控制单元
3 多机通讯
计算机集散控制仍然是目前计算机控制的一种 前沿技术 。采用微机与多台工业控制机组成分布式 控制系统 ,实现各种生产过程控制及其集中管理[6] 。 在结构上采用了分级设计的思想 ,用多台单片机构 成从机 ,并可进行分散设置 ,因此 ,各机之间信息的 传送显得十分重要 。为了实现数据的合理传送 ,必
[ 5 ] Mat sumura F , Fujita M ,Okawa K. Modeling and co n2 《机械与电子》2007 (5)
t rol of magnetic bearing systems achieving a rotation a2 ro und axis of lnertia[ Z]. 273 - 280. [ 6 ] Schweitzer G ,Bleuler H , Traxler A. Active magnetic bearings basics ,p roperties and applications of active magnetic bearings [ Z ] . ET H zurich , Switzerland : vdf Hochschulverlag A G an der ET H Zurich ,1994. [ 7 ] Higuchi T. Proceedings of t he second internatio nal
0900 H~0A FF H
# 03 单片机工作状态及参数数据交流区
0B00 H~0CFF H
# 04 单片机工作状态及参数数据交流区
0D00 H~17 FF H
系统功能扩展预留单元
表 2 所指定的存储单元 # 01~ # 04 单片机都 能够对该存储单元进行读写 。虚拟 I2 C 总线协议采 用非标 准的 快速 传输 模式 , 即 400 k Hz ( T = 2. 5 μs) 。如表 2 所示 ,0400 H~17 FF H 单元是多机信 息交流区域存储单元 ,在系统初始化时将该单元清 0 。I2 C 总线的工作状态 0400 H~0401 H 单元 ,其中 0400 H 单元存储 I2 C 总线读状态 ,0 表示空闲 ,1 表 示正在读 ;0401 H 单元存储 I2 C 总线写状态 ,0 表示 空闲 ,1 表示正在写 。0402 H 单元存储总线权归属 , 该存储单元的值就是当前有总线使用权的单片机机 号 (0~4) 。在总线忙的时候 ,若有节点要操作总线 , 就需要总线优先排序 ,一般规则为“先请求先获权”。 0500 H~0CFF H 单元用来存储 # 01~ # 04 单片机 工作状态及参数 。
存储单元
功能分配
0400 H~0401 H
I2 C 总线的工作状态
0402 H~0403 H
总线使用权归属
0404 H~0405 H
总线优先权
0406 H~04 FF H
总线状态功能预留
0500 H~06 FF H
# 01 单片机工作状态及参数数据交流区
0704 H~08 FF H
# 02 单片机工作状态及参数数据交流区
1 分布式控制系统
单片机分布式控制系统如图 1 所示 。单片机由 于 体积小 、灵活 、成本低及抗干扰能力强 ,能针对性
收稿日期 :2006 12 17 基金项目 :广东省科技计划项目资助 (2005B10201010)
图 1 单片机分布式控制系统
参考文献 :
[ 1 ] Larso nneur R. Design and co nt rol of active magnetic bearing systems for high speed rotation [ D ] . Zurich : ET H ,1994.
图 2 人机界面结构
# 01 单片机的 P1. 0~ P1. 3 分别控制 L CD 液 晶显示屏的 A0 (寄存器选择) 、CS (片选) 、SEL (模 式选择) 以及 R ES (复位信号) ; P1. 4~ P1. 7 与一个 54L S573 扩展输出 组成 4 ×8 矩阵 键盘 ; P2. 6 和 P2. 7 作为虚拟的 I2C 总线 ; P3 口作其它 I/ O 选通 端口 。
《机械与电子》2007 (5)
须采取一定的网络形式 。本系统采用总线型结构 , 由一条公用总线 ( I2 C 总线) 连接若干个节点所形成 通讯网络 。其中一个节点是 I2 C E2 PROM ,由它提 供共享资源 ,其它节点就是上文提到的 # 01~ # 04 单 片 机 。本 系 统 使 用 了 2 片 A T24C64 I2 C E 2 2 PROM ,其中 00 # 用来储存汉字库和字符库 ; 01 # 用作单片机多机信息交流的公共存储区[7] 。01 # I2 C E2 PROM 存储单元分配如表 1 所示 。
2 硬件设计
液晶显示选用 SED1335 驱动 320 ×240 点阵 L CD ; 操作按键采用薄膜按键 。单片机选择有较大 Flash 存储器的单片机 S TC89C516RD + 。该芯片 有 1 280 Bytes RAM 和 64 kB Flash 存储器 ,而且 具有在应用可编程 ( IA P) ,在线可编程 ( ISP) ,可实 现远程软件升级 ,无需编程器 ,此芯片适用于中小型 系统的开发与应用[4 - 5] 。 2. 1 人机界面