松下伺服调试参数复习进程
伺服电机要调参数
伺服电机要调参数 Prepared on 22 November 2020日常生活中,我们所使用的手机、电视机、电脑等,当然也包括机械类产品,使用前都是需要调节好相关参数后,才能更好的方便正常使用,那么松下伺服电机要调哪些参数呢,具体请看下文。
松下伺服电机要调哪些参数具体如下:一、松下伺服电机基本接线。
【1】主电源输入采用220V,从L1、L3接入(实际使用应参照松下伺服操作手册)。
【2】控制电源输入r或t,也可以直接连接220V。
【3】伺服电机接线方式(见松下伺服操作手册第22至23页),编码器接线(见松下伺服操作手册第24至26页),切勿接错。
二、松下伺服电机试机步骤。
【1】JOG试机功能:仅按基本接线就可试机。
a.在数码显示为初始状态‘r0’的状态下,按‘SET’键。
b.然后连续按‘MODE’键直至数码显示为‘AF-AcL’。
c.然后按上、下键至‘AF-JoG’。
d.按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’。
e.按住‘<’键直至显示‘SrV-on’。
f.按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定,按‘SET’键结束。
【2】内部速度控制方式。
+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地。
(29脚)接COM-。
c.参数、设置为1(注:此类参数修改后应写入EEPROM,并重新上电)。
调节参数,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
【3】位置控制方式。
+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地。
(29脚)接COM-。
(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V)。
(4脚)接脉冲信号,SIGN(6脚)接方向信号。
e.参数设置为0,No42设置为3,No43设置为1。
(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
g.另外,调整参数、,可改变电机每转所需的脉冲数(即电子齿轮)。
PLC资料:松下A5系列伺服驱动器使用说明

松下A5系列伺服驱动器使用说明
伺服驱动器面板操作:
1.参数设置(如下图所示)
①按“SET”键
②按“MODE”键选择到“Pr 00”,按“▲”或“▼”选择项目。
③按“SET”键,按“▲”或“▼”调整参数。
④调整后,长按“SET”键返回。
2.参数保存,数据设好,按“SET”确认。
①按“MODE”键选择到“EE-SET”后
②按“SET”键确认,出现“EEP-”,
③按“▲”键3S后,出现“Finsh”/“reset”然后重新上电既保存。
(如图所示)
3.绝对编码器清零。
(如图所示)。
4、参数初始化(恢复出厂)
按下“MODE”键,再按“▲”或“▼”选择功能项目。
选择好功能后,按“SET”键开始执行该功能。
然后按下“▼”键持续3S。
依次出现“start”→“finish”表示执行完成。
5、报警解除操作。
(如图所示)
当出现报警且故障解除后,可通过以下操作解除报警。
附:详细内容请参照“松下伺服A5系列.pdf”。
松下伺服电机调整参考与常见问题解决方法

松下伺服电机调整参考与常见问题解决方法一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF -AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.10、No.11、No.12,适当降低系统增益。
伺服电机的调试步骤(精)

伺服电机的调试步骤伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID 参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
比如,松下是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC )上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
松下A4数字交流伺服安装调试说明书

Panasonic松下A4数字交流伺服安装调试说明书(2005.11版本)1目录1. 松下A4 连接示意图2. 通电前的检查3. 通电时的检查4. 松下A4 伺服驱动器的参数设定1)松下伺服驱动器修改参数的操作方法2) 松下A4 伺服驱动器参数表3)松下A4 伺服驱动器参数设定步骤5.常见故障报警的处理重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种情况,不在松下的保修范围!)2. 通电前的检查1) 确认松下伺服驱动器和电机插头的连接,相序是否正确:A .中惯量电机,不带刹车制动器的连接: 3 U A 2 VB 1 W C接地 D注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接:U FV IW B接地 D刹车电源G刹车电源HC. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接:U DV EW F接地G刹车电源 A刹车电源 B2)确认松下伺服驱动器X6 和松下伺服电机编码器联接正确。
3)确认松下伺服驱动器X5 和数控系统的插头联接正确。
3.通电时的检查1) 确认三相主电路输入电压在200V-220V 范围内。
建议用户选用380V/200V 的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V 范围内。
4.松下A4 伺服驱动器的参数设定1)松下伺服驱动器修改参数的操作方法A. 接通驱动器电源;B. 按操作面板上的“SET”键;C. 按住“MODE”键,选择参数页面D. ,下○∨按钮,选择你需要修改参数的参数号码例修改42 号参数);E. 按“SET”键,显示原来的参数值F. 用左○<,上○∧,下○∨按钮,改变参数值;G. 修改完毕, 按“SET”键确定。
重复以上D~G 过程,修改其它参数。
修改参数操作完毕,切记选择驱动器EEPROM 写入模式,保存参数。
松下伺服驱动器参数设置与常见故障解决分析
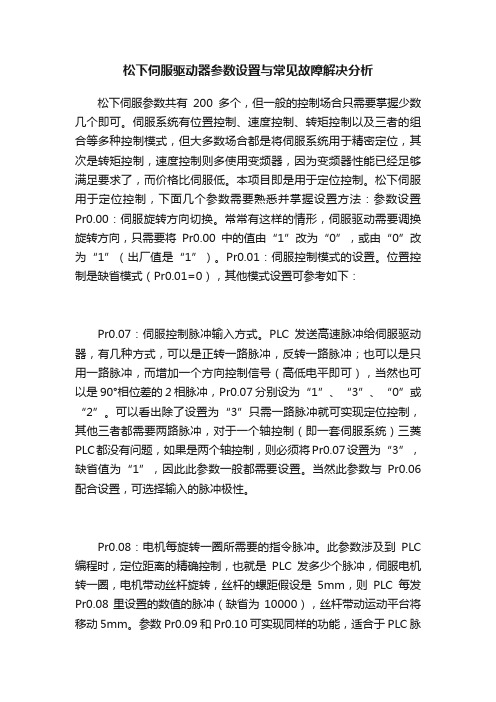
松下伺服驱动器参数设置与常见故障解决分析松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。
伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。
本项目即是用于定位控制。
松下伺服用于定位控制,下面几个参数需要熟悉并掌握设置方法:参数设置Pr0.00:伺服旋转方向切换。
常常有这样的情形,伺服驱动需要调换旋转方向,只需要将Pr0.00中的值由“1”改为“0”,或由“0”改为“1”(出厂值是“1”)。
Pr0.01:伺服控制模式的设置。
位置控制是缺省模式(Pr0.01=0),其他模式设置可参考如下:Pr0.07:伺服控制脉冲输入方式。
PLC发送高速脉冲给伺服驱动器,有几种方式,可以是正转一路脉冲,反转一路脉冲;也可以是只用一路脉冲,而增加一个方向控制信号(高低电平即可),当然也可以是90°相位差的2相脉冲,Pr0.07分别设为“1”、“3”、“0”或“2”。
可以看出除了设置为“3”只需一路脉冲就可实现定位控制,其他三者都需要两路脉冲,对于一个轴控制(即一套伺服系统)三菱PLC都没有问题,如果是两个轴控制,则必须将Pr0.07设置为“3”,缺省值为“1”,因此此参数一般都需要设置。
当然此参数与Pr0.06配合设置,可选择输入的脉冲极性。
Pr0.08:电机每旋转一圈所需要的指令脉冲。
此参数涉及到PLC 编程时,定位距离的精确控制,也就是PLC发多少个脉冲,伺服电机转一圈,电机带动丝杆旋转,丝杆的螺距假设是5mm,则PLC每发Pr0.08里设置的数值的脉冲(缺省为10000),丝杆带动运动平台将移动5mm。
参数Pr0.09和Pr0.10可实现同样的功能,适合于PLC脉冲数和移动距离不能整除的场合,其实掌握了Pr0.08,已经无往而不胜了。
Pr5.04:伺服定位,一般两端装有极限位的行程开关,如果装了,需要设置Pr5.04由“1”设置为“0”,否则行程开关将不起作用。
伺服电机的调试步骤(精)
伺服电机的调试步骤伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID 参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
比如,松下是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC )上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
松下A5驱动器调试
• 安装:用PC机调试驱动器, 首先需要安装软件,执行 下面两个文件夹的安装
• 安装完成后,桌面上生成 快捷图标 • 连线,运行软件前先参考 右图进行连线。
松下A5驱动器调试
• 使用调试软件进行驱动器参数导入
执行快捷图标进入A5L调试软件
注: 如果接线正确,在[选 择与驱动器通信]中,会 显示当前与PC机相连接 的驱动器。
松下A5驱动器调试
• 驱动器常见报警处理
上电,Y轴震动很厉害 1) Y轴编码器反馈线接错了,Y1编码器反馈接到Y2轴,Y2轴编码器反馈接到 Y1轴。需要把线接好,在容易犯错的地方,标识好线缆。 马达有啸叫 1)马达增益参数太高,需要根据上面讲的方法把参数降下来。 2)具有机械共振,需要检测共振频率并设定到驱动器参数中<参考共振频率 设定>。 其它问题。
松下A5驱动器调试
• 调试软件中在线修改驱动器的参数
1,首先选择调试软件显示所有参数,选择右图加亮显示 栏。驱动器参数分9类,选择需要修改的参数类。单击参 数设定值,即可以设定驱动器中的参数。
2,参数设定完成后需 要传送再写入,才能生 效。
注:在修改参数前,请参考驱动器的说明手册。确保完全理解参数的意义再 设定。设定参数时,马达必须处于静止状态
Pr100
1500
该值在没有电机啸叫的条 件下,越大越好。 该值在没有电机啸叫的条 件下,越大越好。 该值在没有电机啸叫的条 件下,越小越好。 该值在没有噪音的条件下, 越小越好。
Pr101
700
Pr102 Pr104
60 35
松下A5驱动器调试
• 驱动器常规参数意义及修改指导
续前表 参数号: Pr105 Pr106 Pr107 设定值 1570 750 10000 参数意义和设定指导 第2位置增益。在Pr002=0时,Pr114=1;Pr115=10 时有效, 调试参考Pr100。 第2速度增益。在Pr002=0时,Pr114=1;Pr115=10 时有效, 调试参考Pr101。 第2积分时间常数。在Pr002=0时,Pr114=1;Pr115=10 时有 效,调试参考Pr102。 第2推力滤波时间常数。在Pr002=0时,Pr114=1;Pr115=10 时有效,调试参考Pr104。 速度前馈。系统走3MMF1000的圆,如果出现椭圆,则可以 通过修改该值进行调整。 设定第二增益是否有效;0-第二增益无效;1—第二增益有效。 该参数一般设定为0 第二增益切换条件。如果第二增益有效,则在马达出现啸叫 时,需要同时降低第1和第2增益的参数。 C2的系统中,只采用 第一 增益。 在有两段PID的控制中,该 值一般比较大,即积分效果 减弱。 备注
Panasonic伺服Ethercat NC调试
1.PANATERM软件设置一下伺服参数:
对象编辑器内部:
a.
伺服模式设置:位置模式采用8;
b.
设置电机旋转极性:默认为0,反向设置224;
c.
设置电机旋转单圈脉冲,A6B默认为电机编码器精度:8388508;
以上参数需要伺服驱动器在未通讯的状态设置;
d.
设置伺服电机编码器类型;设定完成后驱动器出现40报警则需要执行下图的动作
e.屏蔽电机正负极限;设置电机抱闸参数
2.Twincat2参数设置:
设置Twincat2编码器和电机参数:
a.扫描伺服驱动器,扫描顺序按照网线连接方式;
b.关联实体轴和NC;
c.
设置Scaling factor;
外部单圈位移/电机编码器精度/减速比。
松下A5伺服说明书
松下A5伺服说明书松下a5伺服说明书篇一:松下A5系列伺服位置控制使用方法松下A5系列伺服位置控制使用方法000)-----按上下键或<键(可移动小数点)到要设定的参数——按S键进入、修改(按上升键或下降键)——按S键保持3秒——按一下M键>写(转载于: 厦门培训考试网:松下a5伺服说明书)入模式(EE_SEb)>再按”S”键>执行显示(EEP -)按上升键保持5秒----EEP --、EEP ---、EEP ----、--------SbRrb---Finish,结束。
三、辅助功能模式(AF_RcL):按上升或者下降键选择项目1、自动补偿调整(AF_oF1、oF2、oF3)AF_RcL>下降键>AF_oF1>S键>oF1 --持续按上升键执行。
2、试运行(JOG)持续按上升键(CW)--rERdy------<键---SrU_on---持续上升键(CCW)3、参数初始化(AF_ini)---按“S”键----ini----持续按上升键5秒 -------Finish----------结束4、前面板锁定解除(AF_unL)---按“S”键---unL--持续按上升键5秒----SbRrb----unL------、------------Finish 结束。
以上字母只是近似面板上显示的简码。
四、常见报警及其原因1、“11”---控制电源电压不足电源电压低或者驱动器故障2、“16”过载负载过重或电机电源线相序错误3、“21”编码器通讯异常编码器断线或者虚焊、漏焊、脱焊4、“24”位置偏差过大电机未按指令动作加大Pr0.14的值或者设为0 五、接线1、主电源及编码器接线:2、大功率伺服编码器接线:3、控制端子接线:松下a5伺服说明书篇二:Panasonic A5系列伺服驱动器参数设定说明Panasonic A5系列伺服驱动器参数设定说明一、需要设定的参数:二、参数的修改1、按设置键S进入d**.uEP;2、按模式键M进入参数Prr.***,再按设置键S进入参数修改模式注:编号带*之参数,其设定值必须在控制电源断电重启之后才能修改成功。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
松下伺服调试参数
精品资料
仅供学习与交流,如有侵权请联系网站删除 谢谢
2
松下 A5系列伺服参数
一、松下MINAS A5系列伺服驱动器参数设定: 用松下MINAS A5系列伺服
驱动器,设定以下参数后,机床即可工作。但
是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数 号 功能 设定值 设定值说明
Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。在维宏
控制系统里面,通过脉冲监测,来 检测控制卡发出脉冲是否正确,从而可判断
出是否存在电气干扰问题。(该参数为指令脉冲总和)
Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制
Pr0.02 设定实时自动调整 调试设定 0:无效 1:标准 3:垂直轴
Pr0.03 实时自动调整机器刚性设定 调试设定 0—31,设定值越高,响应越快,
但值太高, 容易产生振动。实时自动增益调整时机器刚性 设定。
Pr0.04 惯量比 调试设定 设置机械负载惯量对电机转子惯量比之比率。 设定值
(%)=(负载惯量/转子惯量)*100。 实时自动增益调整时,此参数可自动估
算并每30分钟在EEPROM中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器
专用输入(高速接口)
Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻
辑。 Pr0.09 第一指令脉冲分倍频分子 需计算 1~10000 典型值:螺距5mm,编
码器分辨率10000,连 轴器直拖,脉冲当量0.001mm时,
Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:
Pr0.09/Pr0.10=10000/5000=2/1
精品资料
仅供学习与交流,如有侵权请联系网站删除 谢谢
3
Pr0.10 指令脉冲分倍频的分母 需计算 1~10000
二、 松下驱动器的调节 松下伺服器修改参数设定值后,须选择EEPROM 写入
模式。
方法如下: ①按 MODE键,选择EEPROM写入显示模式EE_SEt;
②按 SET键,显示EEP -;
③按住上翻键约3 秒,显示EEP ― ― 到― ― ― ― ― ― 到StArt,参数
保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断
电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定
参数。
三、 电子齿轮比的计算(针对松下A5驱动),有两种计算方式:
1、松下专有方式:Pr0.08* 电机每旋转一次的指令脉冲数=螺距/脉冲当量
2、通用计算方式:当Pr0.08参数为0时,电子齿轮比=分子/分母
=Pr0.09/Pr0.10=编码器分辨率*脉冲当量*机械减速比/螺距
(=10000*0.001*1/5=2/1)
四、惯量比的调节
Pr0.04惯量比 该参数对机床运行的平稳性、加工效果等起到了很重要的作用,
比如:机床振动、机床电机发出异常声音、加工出来的圆不圆、加工的工件粗
糙、加工的工件变形等,只有设置合理的惯量比,机床才能发挥出最大的优
势,才能加工出更好的工件。
惯量比的设定有两种方法:
精品资料
仅供学习与交流,如有侵权请联系网站删除 谢谢
4
其一、手动设定直接手动将估算的惯量比设置到【Pr0.04】里。如果手动设
置,需要你估算该机床的惯量比,既然估算,很难达到理想的惯量比,机床就
很难发挥出最大的优势。
其二、自动设定机床运动。只有适合机床的惯量比,加工出来的工件才是最好
的
下面我将详细介绍惯量比的自动调节:
1) 调节【Pr0.02】实时自动增益调整模式设定 【Pr0.02】 X轴、Y轴设为【1】
【Pr0.02】 Z轴设为【3】
2) 调节【Pr0.03】实时自动调整机械刚性选择
该参数非常重要,决定了机床的平稳性以及加工效果。一般设定值在0~31之
间。X轴Y 轴Z轴可根据机床本身任意设,在机床运动时机床不振动、电机不
发出嗡嗡声音的前提下,尽量增大参数的值,因为该参数决定机床的刚性,机
床的刚性越大,加工出来的工件越理想,加工效果越好
3) 装载一个三轴加工文件,最好连动的,可以不放工件进行空跑,也可以放工
件。大约十分钟左右便可以停下来,此时,你去看【Pr0.04】,已经有了变
化,此时不管数值是多少,不要去改动。因为是自动惯量比,请抛开你以前认
为的数值。如果其中某一个轴为0,重新操作。
4) 重新调节【Pr0.02】实时自动增益调整模式设定 【Pr0.02】 X轴、Y轴设为
【0】 【Pr0.02】 Z轴设为【0】 即将实时自动增益调整设置无效
5) 调节【Pr1.15】第一控制切换模式 将【Pr1.15】设为【0】,让第一增益值固
定
精品资料
仅供学习与交流,如有侵权请联系网站删除 谢谢
5
6) 调节【Pr1.00】第 1位置环增益和【Pr1.01】第 1速度环增益 在实时自动增
益时,【Pr1.00】第 1 位置环增益和【Pr1.01】第 1 速度环增益便会随着机械刚
性的选择进行变化。在机床运动时机床不振动、电机不发出嗡嗡声音的前提
下,尽量增大两个参数的值,这样响应越快,加工出来的工件越理想,加工效
果越好。
7) 此时,惯量比已经自动设定好,请不要手动更改。每一个机床都会有自己的
一个惯量比,哪怕是同样的机床,惯量比也是不同的。所有的机床的调节方法
都是一样的。
8) 如果机床振动或者某个轴的电机发出嗡嗡的叫声,调节该轴对应驱动器的的
【Pr0.03】实时自动调整机械刚性选择,把刚性数值一个一个的降低,直到不
振动或者嗡嗡的叫为止,然后再进行自动增益调整。