海洋重力场在潜艇导航中的应用_陈勇
高精度惯性导航系统对重力场模型的要求

个 高通滤波器 ,随着时间的增加 ,其值也在增加 ,
1 INS 误差分析方程
IN S 的基本原理是牛顿第二定律 ,它在惯性
系中的方程为[1 ] :
¨r = a + g ( r)
(1)
式中 , ¨r 是载体加速度 ; a 是加速度计所测的比力 ;
g ( r) 为引力 ,它与载体位置 r 有关 。
为了便于分析 ,不考虑惯性传感器自身误差
另外在短时间内重力误差引起的水平位置误差很小采用不同重力场模型的差别不是很大这间接反映了图1中所表对于使用球谐函数模型进行重力补偿则对应的残余重力扰动水平分量的功率谱等于在式6的低频部分乘以球谐函数模型相应的误差阶510武汉大学学报
第 31 卷 第 6 期 2006 年 6 月
武 汉 大 学 学 报 ·信 息 科 学 版 Geo matics and Info rmation Science of Wuhan University
[ 2 ] J eleli C. Gravity o n Precise Sho rt2Term ,32D Free2 Inertial Navigatio n [J ] . Navigatio n , 1997 , 44 (3) : 3472357
(6)
i =
式中 , K0 是变形贝塞耳函数 ;ωs 是空间角频率 , 而
式 (3) 中的 ω是时间角频率 , 它们之间可通过载
体速度 v 联系起来[2 ] :
n
∑ PS Dδgx (ω) = 2ω2 / v3 βσi 2i K0 (βωi / v) (7) i =1
对于使用球谐函数模型进行重力补偿 ,则对
李 斐等 :高精度惯性导航系统对重力场模型的要求
509
三种平台式惯性惯导系统介绍

高精度与稳定性
智能化与自主化
利用人工智能、机器学习等技术,实 现了系统的智能化和自主化,提高了 导航和定位的准确性和可靠性。
通过采用先进的惯性传感器、优化算法和误 差补偿技术,提高了系统的测量精度和稳定 性,满足了高精度导航和定位的需求。
面临的市场挑战与机遇
要点一
挑战
市场竞争激烈,技术更新换代速度快,需要不断投入研发 和创新;同时,用户对价格、性能、体积、重量等方面的 要求越来越高。
性能优势
具有高精度、高稳定性、自主导航能 力强等优点。在长时间导航过程中, 能够保持较高的导航精度和稳定性, 不受外界干扰影响。
应用案例与效果展示
应用案例
该系统广泛应用于航空、航天、航海等领域的导航和定位。例如,在导弹制导、飞机导航、潜艇定位等方面都有 广泛应用。
效果展示
在实际应用中,该系统表现出了优异的导航性能和稳定性。例如,在某型导弹制导中,采用该系统后,导弹的命 中精度得到了显著提高;在某型飞机导航中,该系统成功实现了远程跨洋飞行的高精度导航。
现状
目前,平台式惯性惯导系统已经广泛应用于航空、航天、航海、陆地车辆和机器人等领域。随着技术 的不断进步和应用需求的不断提高,惯性惯导系统正朝着高精度、高可靠性、小型化和低成本的方向 发展。
应用领域与市场需求
应用领域
平台式惯性惯导系统广泛应用于军事和 民用领域。在军事领域,它主要用于导 弹制导、飞机导航、潜艇导航和士兵定 位等。在民用领域,它则用于民航飞机 导航、船舶导航、陆地车辆导航和机器 人导航等。
03 第二种平台式惯性惯导系 统
系统组成与结构特点
组成部件
该系统主要由惯性测量装置、计算机 、控制显示器和稳定平台等组成。
海洋重力仪金属零长弹簧的性能研究及研制
海洋重力仪金属零长弹簧的性能研究及研制
汪龙;邹舟;吴鹏飞;柳林涛
【期刊名称】《大地测量与地球动力学》
【年(卷),期】2024(44)7
【摘要】揭示海洋重力仪金属零长弹簧的物理特性,阐述基于Fe-Ni系恒弹性合金研制金属零长弹簧的工艺,并系统总结关键研制过程及研制难点,研制出一批性能优异、零长状态佳的海洋重力仪金属零长弹簧。
【总页数】5页(P759-763)
【作者】汪龙;邹舟;吴鹏飞;柳林涛
【作者单位】中国科学院精密测量科学与技术创新研究院大地测量与地球动力学国家重点实验室
【正文语种】中文
【中图分类】P312
【相关文献】
1.基于零长弹簧的超低频垂直隔振系统研究
2.具有密封弹簧腔室的单向双重金属密封球阀的研制
3.贝尔雷斯金属零长弹簧自动重力仪
4.重力仪中零长弹簧的研制
5.基于金属骨架材料分子弹簧隔振器力学性能研究
因版权原因,仅展示原文概要,查看原文内容请购买。
地磁辅助惯性组合导航技术分析_赵国荣
∑∑Q
q =0 t =0 r = q -t N max q
tr
( x, y) e uz ( 1 ) ( x, y) e uz ( 2 ) ( 3)
∑∑R
q =0 t =0 r = q -t N max q
tr
。同时, 磁测量结果呈带
状分布, 插值计算之前必须先将数据进行网格化处 引入了二次误差, 影响精度。因此, 使用符合位 理, 场理论的模型描述局部区域地磁场将是一种更合 理的方法, 其中常用的有以下两种: a. 矩谐模型 1981 年, Alldredge 指出在直角坐标系中求解 即 矩 谐 分 析 ( rectangular 拉普拉 斯 方 程 的 方 法,
与此同时自从1989年美国cornell大学的psiaki等人率先提出利用地磁场确定卫星轨道的概念以来地磁导航方向成为国际导航领域的一大研究新热点相较于其他辅助导航方法地磁场的测量不受位置和环境的影响无论在地上高空还是水下无论任何季节气候地磁场都可以被检测到这无疑为全天候全地域导航提供了基础
2013 年 4 月 第9 卷 第2 期 中图分类号: V 249. 32 + 8 文献标识码: A
[ 6] 较小区域的一种建模方法 , 一般在 3 000 km × 3 000 km 以内, 只要在这个范围内还是适用的。
3
3. 1
高精度地磁场模型的构建
模型的介绍与选择
而导航修正的过程中, 基准图尺度一般较小, 完 全可以满足需求。 b. 球冠谐模型 1985 年 Haines 提出了球冠谐和分析法( 简称 为 SCHA) 。它是在一个以地面球冠( 也可是任意 高度的球冠 ) 为底, 向上无限延伸的球面锥体中 求解拉普拉斯方程。 当区域大到不能用平面来 近似代替时, 球冠谐分析是一种有效的手段。 但 球冠谐分析相对复杂, 待定系数的个数十分 是, 庞大, 给计算机带来了很大的负担, 实时性不强。 综上所述, 由于全球地磁场模型精度过低, 而符合位场理论的局部地磁场模型中球冠谐分 因此矩谐模型将是构建滤波导航 析法过于复杂, 模型的一种更理想的方法。 3. 2 模型求解算法分析 3. 2. 1 模型的描述 矩谐分析研究的对象是一个矩形区域, 在没 有磁场源的空间, 磁位满足拉普拉斯方程, 根据 此方程的解, 推导出磁场的三分量可表示成如下 形式: Bx = - By = - Bz = - 其中: Q tr ( x, y) = tv( D tr sin( tvx) cos( rwy) + E tr sin( tvx) sin( rwy) - F tr cos( tvx) cos( rwy) - G tr cos( tvx) sin( rwy) ) ( 4) v =-A+ x v =-B + y v =-C + z
一种可视化小型海洋环境信息系统的设计与实现
K yw rs ai ni n etn rao s m, G SMan egah f m tnSsm)v ulao , ax cn o e od m r e v om n ifm tns t M I( reG or yI o ao y e , saztn M 0 otl ne r o i ye i p nr i t i ii r
中 图 分类 号 T 9 86 N 4 .1
De i n a d Re l a i n o s a ma l c l a i e E vr n e tI f r t n S se sg n a i t fa Viu l z o S l S a eM rn n io m n n o ma o y tm i
维普资讯
总第 1 5 6期 20 年 第 6 06 期
舰 船 电 予 工 程
V 12 o6 o.6N .
6 6
一
种 可视 化 小 型 海 洋环 境 信 息 系统 的设计 与 实 现
姜 文星 梁尔 冰 边 少锋¨
( 海军工程大学电气与信息工程学 院, 武汉 4 03 ) ( ’ 30 3 海军司令部航 保部。 天津 ’ 304 ) 00 2
Ab ta t T i p p rd s u ss h w t e in a s l s a n e e v rn n noma o y tm sn p o t l i V s a sr c hs a e i se o o d sg ma c l ma n n i me t ifr t n s s c l e o i e u ig Ma X c nr n i l o u C 4+ . h n w a c o l h teb s u ci fq eyn , ay ig d s lyn h aa o r e g o r p y ifr t n. - T e ec a c mpi h ai fn t n o u r ig a l z , i a ig te d t n ma i e ga h nomai n s c o n n p n o
基于重力匹配导航的潜艇避障方法分析
( 1 . Be n g b u Na v a l Pe t t y Of f i c e r Ac a de my,Be n g b u 2 33 01 2) ( 2 . No . 9 2 5 2 9 Tr o o p s o f PLA ,Ni n g b o 31 5 0 0 0 )
总第 2 2 9 期
舰 船 电 子 工 程
S h i p El e c t r o n i c E n g i n e e r i n g
Vo 1 . 3 3 No . 7
37
2 0 1 3年第 7 期
基 于 重 力 匹配 导 航 的 潜 艇 避 障 方 法 分 析
康晓磊 崔恒彬 许凤军
.
Th e s p e e d e r r o r i s t h e ma i n s o u r c e t O t he Et o t v o s ,t he n t h e u nc o n v e nt i o n a l i t y g r a v i t y wh i c h i s c o r r e c t e d i s a na l y z e . Ba d s e d o n t h e a b o v e a —
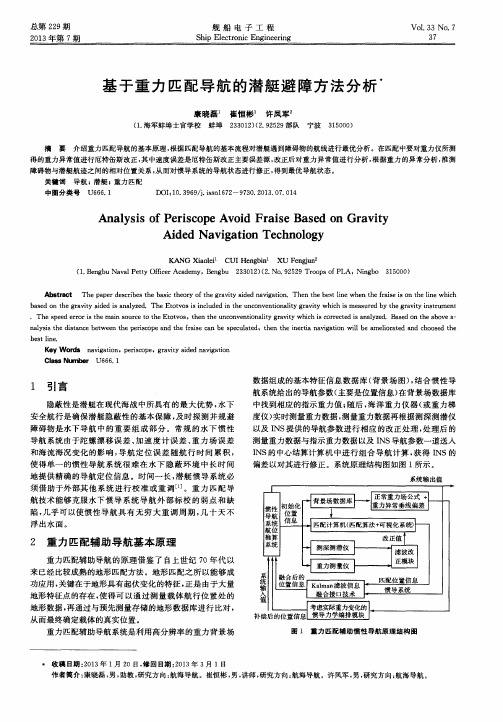
数据组成 的基本特征信 息数据库 ( 背景场 图) , 结合 惯性 导 航系统给 出的导航参数 ( 主要是位置信息) 在背景场数据 库
中找到相应的指示重力值 ; 随后 , 海洋重 力仪器 ( 或重力梯 度仪 ) 实 时测量重力数据 , 测量重力数据再 根据测深测潜 仪
以及 I NS提供 的导航参 数进行相 应 的改正处 理 , 处 理后 的
Abs t r a c t Th e p a p e r de s c r i b e s t h e b a s i c t h e o r y o f t he g r a v i t y a i d e d n a v i g a t i o n.Th e n t h e b e s t l i ne wh e n t h e f r a i s e i s o n t h e 1 i n e wh i c h b a s e d o n t he g r a v i t y a i d e d i s a n a l y z e d . Th e Et o t v o s i s i n c l u d e d i n t h e un c 0 n v e nt i o n a l i t y gr a v i t y wh i c h i s me a s ur e d by t h e g r a v i t y i n s t r u me n t
潜艇重力辅助惯性导航系统研究与仿真
重 力 辅 助 惯 性 导 航 系 统 (rvya e nra nv a o gai i die i ai t n t d tl gi
摘要: 从工 程 应 用 出 发 , 过分 析 水 下 重 力测 量 的 各 种 误 差 源 , 立 精 确 的 重 力 异 常 数 据 误 差 模 型 。 改 进 了匹 配 算 通 建
法, 并设计 了不同精度的一组惯性导航系统以验证重力辅助导航的可行性。结果 表明, 海洋 固体潮 、 海潮 、 海面地形
精度还有待提高, 运载体受海浪 、 洋流 、 潮汐 以及 导航误 差等 扰动因素影响 , 有害重力扰 动往往 大于实际重力 变化幅度 ,
重 力辅 助 导航 手段 也 就 失 去 了意 义 。 目前 , 者 较 多研 究 匹 学
配 算法 和理 论 , 重 力 场 数 据 获 取 和 处 理 缺 少 系 统 的 分 析 。 对
式中 : 日是大 地 纬 度 ; , 别 是 赤 道 和 两 极 的 正 常 重 力 , y分
ss m, A N ) yt G I S 是一种利用地球 固有特 征信息 , e 通过 一定 的 数据匹配方法实现校正惯性导航系统 ( 导) 惯 累积误差 , 从而 获取高精度位置信息 的 自主导航技术 。G IS主要 应用 于 AN
量 变 化 , 种偏 差 就 是 重 力 异 常 。 显 然 , 这 比力 矢 量 的 变 化 会 引 起 惯 导 中加 速 度计 输 出误 差 , 而 引起 定 位 误 差 。 从 1 1 纬 度误 差 补 偿 .
深海探测器的自主导航技术与应用研究与分析
深海探测器的自主导航技术与应用研究与分析在人类探索海洋的进程中,深海探测器扮演着至关重要的角色。
随着科技的不断进步,深海探测器的自主导航技术也取得了显著的发展,为我们深入了解神秘的深海世界提供了有力的支持。
深海环境极为复杂和恶劣,压力巨大、温度极低、光线微弱,这给深海探测器的导航带来了巨大的挑战。
在这样的环境下,传统的导航方法往往难以奏效,因此,发展先进的自主导航技术成为了必然的选择。
目前,常见的深海探测器自主导航技术主要包括惯性导航、声学导航、地球物理场导航以及组合导航等。
惯性导航是一种不依赖外部信息的自主导航方式,通过测量探测器的加速度和角速度来推算其位置和姿态。
然而,惯性导航存在误差积累的问题,长时间工作后精度会逐渐降低。
声学导航则是利用声波在海水中的传播特性来实现导航。
例如,长基线声学导航系统通过在海底布设多个声学基站,探测器接收基站发射的信号来确定自身位置。
这种导航方式精度较高,但系统复杂,成本昂贵,而且容易受到海洋环境噪声的干扰。
地球物理场导航是基于海洋中地球物理场的特征来进行导航,如地磁场、重力场等。
这种导航方式具有自主性强、隐蔽性好等优点,但地球物理场的测量精度和模型精度对导航效果有较大影响。
为了克服单一导航技术的局限性,组合导航技术应运而生。
将惯性导航与声学导航、地球物理场导航等相结合,可以充分发挥各种导航技术的优势,提高导航系统的精度和可靠性。
深海探测器自主导航技术的应用领域非常广泛。
在海洋科学研究方面,它能够帮助科学家精确地测量海洋物理、化学和生物等参数,深入了解海洋的生态系统和气候变化。
例如,通过自主导航,探测器可以按照预定的轨迹采集不同深度的水样,分析其中的化学成分和微生物群落,为研究海洋的物质循环和生态平衡提供重要的数据。
在资源勘探方面,深海蕴含着丰富的矿产资源和能源,如石油、天然气、锰结核等。
深海探测器的自主导航技术可以使勘探设备准确地到达目标区域,进行高效的资源探测和评估。
水下机器人定位导航技术实验报告
水下机器人定位导航技术实验报告一、引言水下机器人在海洋探索、资源开发、科学研究等领域发挥着越来越重要的作用。
而定位导航技术是水下机器人实现自主作业和精确操作的关键。
本次实验旨在研究和评估不同的水下机器人定位导航技术,为其实际应用提供参考和依据。
二、实验目的本次实验的主要目的是:1、比较不同定位导航技术在水下环境中的精度和可靠性。
2、分析各种技术在不同水质、水流条件下的性能表现。
3、探索如何提高水下机器人定位导航的准确性和稳定性。
三、实验设备与环境(一)水下机器人本次实验采用了型号水下机器人,其具备主要功能和特点。
(二)定位导航系统1、惯性导航系统(INS)2、声学定位系统3、卫星导航系统(在水面时辅助)(三)实验环境实验在一个大型的室内水池中进行,水池尺寸为长、宽、深,模拟了不同的水质(清澈、混浊)和水流条件(缓流、急流)。
四、实验方法与步骤(一)实验准备1、对水下机器人进行全面检查和调试,确保其各项功能正常。
2、安装和校准定位导航系统,设置相关参数。
(二)实验过程1、在不同水质和水流条件下,分别启动水下机器人,让其按照预设的轨迹运动。
2、同时记录惯性导航系统、声学定位系统和卫星导航系统(在水面时)的数据。
(三)数据采集与处理1、实验过程中,实时采集各个定位导航系统的数据。
2、对采集到的数据进行滤波、降噪等预处理。
3、采用特定的算法和软件对数据进行分析和计算,得出定位导航的精度和误差。
五、实验结果与分析(一)惯性导航系统1、在短时间内,惯性导航系统能够提供较为准确的位置和姿态信息。
2、但随着时间的推移,由于累积误差的存在,其定位精度逐渐降低。
(二)声学定位系统1、在清澈水质和缓流条件下,声学定位系统表现出色,定位精度较高。
2、然而,在混浊水质和急流环境中,声波的传播受到干扰,定位精度有所下降。
(三)卫星导航系统(水面辅助)在水面时,卫星导航系统能够提供非常准确的位置信息,有效地对水下机器人的定位进行校准和修正。
基于重力匹配导航的潜艇避障方法分析
基于重力匹配导航的潜艇避障方法分析一、引言介绍目前潜艇避障技术的现状,重力匹配导航在潜艇避障中的作用以及本论文的研究意义。
二、重力匹配导航技术简介阐述重力匹配导航的原理、优势和限制,以及其在潜艇避障中的应用和局限性。
三、潜艇避障场景分析分析潜艇在不同的水下环境中的避障场景,包括海底地形、水流、海洋生物等因素对潜艇的影响。
四、基于重力匹配导航的潜艇避障方法研究结合重力匹配导航技术,提出一种潜艇避障方法,包括建立地形模型、遥测数据融合、避障实时控制等环节的具体实现方案。
五、实验结果分析以模拟水下环境下的避障场景为例,对本文提出的方法进行实验,分析不同情况下的避障效果,并结合实验结果总结讨论。
六、结论与展望总结本论文的研究工作,指出研究的局限和不足之处,并展望重力匹配导航技术在潜艇避障领域的进一步应用方向。
一、引言潜艇在水下航行时必须面对各种复杂的水下环境,如峭壁、水流、海底障碍物等,因此,避障成为潜艇航行中的重要问题。
现有的潜艇避障技术主要是基于声纳测距和逐层扫描,然而这些技术存在着很多缺陷,如定位不精确、耗时长、易被干扰等。
因此,开发一种更为高效、精准的潜艇避障技术势在必行。
重力匹配导航作为新型的定位与导航技术,近年来在水下机器人尤其是潜艇领域得到了广泛应用。
重力匹配导航利用海底重力场与水下机器人测量的三维加速度数据之间的比较,通过匹配重力异常场来实现定位与导航。
与传统的声纳测距相比,重力匹配导航可以提供更为稳定和高精度的定位和导航,而且具有测距范围广、防干扰能力强等优势,可以有效解决潜艇避障时的问题。
因此,本文旨在探讨基于重力匹配导航的潜艇避障方法。
本研究通过分析水下环境中的避障场景、阐述重力匹配导航的原理及其在潜艇避障中的应用,提出一套实用性较强的潜艇避障方法,并通过实验结果的分析,展示该方法的可行性和可靠性。
这对于提高潜艇在水下任务中的自主性和航行安全性具有重要的意义。
二、重力匹配导航技术简介重力匹配导航技术是一种基于海底重力场的定位与导航技术,它利用水下机器人测量的三维加速度数据与海底重力场之间的比较匹配,通过分析比较结果来计算水下机器人的位置和姿态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#通信#导航#海洋重力场在潜艇导航中的应用陈勇1吴太旗2胡德生1(1海军工程大学武汉430033;2海军海洋测绘研究所天津300061)摘要:重力场辅助水下导航是一种绝对无源的导航方式,是21世纪潜艇导航的发展方向。
从改善潜艇惯性导航系统性能出发,通过对海洋重力场用于潜艇水下辅助导航的两种方式进行论述,给出了详细的应用过程和方法,并提出了相应的改进措施,为进一步将海洋重力场用于潜艇指明了方向。
关键词:海洋重力场惯性系统精度改善图形匹配潜艇导航海洋是人类资源的宝库,随着人类对海洋认知的提高,人类对于海洋的开发利用日益增多,海洋在各个国家的发展中具有非常重要的地位。
海军作为维护国家主权和海洋权益的主要兵种担负的责任越来越重,而潜艇作为海军中的重要力量具有杀手锏的作用。
潜艇水下导航主要利用惯性导航系统(I N S),但是I N S定位误差随时间积累,影响了潜艇水下的有效攻击时间,而利用GPS等无线电辅助导航和天文导航又降低了潜艇的隐蔽性,不利于潜艇的生存。
重力场辅助的水下无源导航系统率先被美国提出,并于1983年成功地在海上进行了实验测试,后来部署在美国海军的三叉戟潜艇上,重力场辅助水下导航系统逐步成为21世纪潜艇的发展方向,成为了各个国家研究的热点[1,2]。
1海洋重力用于潜艇导航的主要方式海洋重力用于潜艇导航,主要在以下两个方面对原惯性系统进行改进;一是利用精确的实测重力信息改善以往惯性系统中简单利用正常重力信息进行位置、速度计算带来的误差,从惯性系统本身角度提高系统的定位导航精度;二是利用重力场图形匹配技术进行组合导航,通过利用外部重力场信息对惯性系统进行组合导航,限制误差随时间积累的特性,提高系统的定位精度,延长系统的重调周期。
2重力场信息对惯性系统自身精度的改善惯性导航系统的基本原理是通过测量载体的加收稿日期:2008-07-29作者简介:陈勇(1979-),男,湖北天门人,博士,讲师;主要从事军事海洋环境与航海方面的理论与应用研究工作。
速度,积分后得到载体的速度,再次积分就可以得到位置信息。
2.1基本原理惯性系统定位的关键是进行加速度的测定和分离,即比力方程。
根据牛顿定理,惯性系统的比力方程在当地水平坐标系(L)下可以用(1)式表示[3]:f L=V&+(2X L ie+X L eL)@V L-g L(1)式中:(2X L ie+X L eL)@V L为科里奥里(Coriolis)加速度V、V&分别为载体的运动速度和加速度矢量,f L 为加速度计的观测结果,即比力,g L为当地的重力加速度。
目前,几乎所有的惯性导航计算中所采用的重力加速度,都不是当地的实际重力值,而是采用正常重力模型计算得到的正常重力值。
国内外许多学者对该问题进行了深入研究[4,5],并提出了一些模型改进措施,但无论采用哪种重力场模型进行计算,求得的正常重力或正常引力都只是实际重力场的近似表示,二者之差就是扰动重力。
文献[6]从扰动重力和重力垂线偏差两个方面对此进行了比较详尽的研究,结果表明,随着惯性系统本身精度的不断提高,用正常重力代替实际重力进行惯导系统力学编排计算带来误差,越来越成为一项突出的定位误差源,需要减弱其影响才能将惯性系统导航定位精度上一个新的台阶。
2.2改进措施对惯性进行重力误差的补偿可以有两种方式:一种是通过安装重力测量装置,将实测重力数据引入惯性系统的编排方程,进行导航解算,减弱重力参数不准确带来的影响,达到实时重力误差补偿的目54天津航海2008年第4期的,另一种是建立相应的重力误差补偿统计模型,通过给定重力误差直接计算出引起的位置和速度误差量,直接对定位结果进行补偿。
当然,比较精确的是第一种补偿方法,但是要对硬件系统内部进行改进,要求比较高,需要在惯性系统的设计阶段进行,同时也增加了惯性系统的成本。
3 重力场图形匹配技术重力场图形匹配技术总体上说就是利用地球重力场特征获取载体位置信息的导航技术,匹配导航系统通常由惯性导航系统、重力背景场数据库、重力传感器、高性能计算机组成,在载体运动过程中,重力传感器可获得重力场的特征数据,同时根据惯导系统提供的概略位置信息,利用一定的匹配算法或准则进行解算,从而求得最佳的匹配位置,并利用该信息对惯导系统进行反馈校正,在不影响惯性系统本身隐蔽性的基础上,最终提高惯性系统的导航定位精度,满足未来战争对潜艇的苛刻要求。
其详细过程如图1所示。
从图中可以看出,进行重力场图形匹配首先要解决好以下两个关键问题。
3.1 高精度重力背景场的数据准备要进行重力场图形匹配,其首要条件就是要有高精度、高分辨率的重力背景场。
从目前情况看,这个条件也已基本具备。
首先,各种高精度测高卫星的发射,如TOPEX 、ERS-2、Env isat 和Jason ,使得利用测高数据反演高精度和高分辨率的海洋重力场异常成为现实[7],目前已可以通过反演获得分辨率2c@2c 的较高精度的海洋重力异常;其次,海军测绘部队近年来也完成了中国海域的许多测量任务,特别是国家相关专项任务,获取了许多重点海区高质量、高分辨率、高精度重力数据;最后,国家海洋局、中石油等部门也对许多海域进行了详细的重力调查,收集了大量的相关重力数据。
所有这些数据通过进一步的精化和融合,利用精确的插值技术进行加密处理,获取满足重力匹配导航需要的重力数据基础是可以实现的。
3.2 重力图形匹配算法重力图形匹配方法[8]是进行重力场图形匹配的核心,简单地说就是通过实测重力与存储的重力数据进行匹配,实现对水下航行器的定位。
目前用于重力场图形匹配的方法主要有两大类:扩展卡尔曼滤波匹配方法和相关匹配方法。
扩展卡尔曼滤波匹配方法的主体思想就是将存储的数据图作为系统的量测方程,把惯导系统的误差方程、重力仪器误差方程等作为状态方程,组合在一起进行卡尔曼滤波,从而获得系统状态的的最优估计,最终实现对惯导系统的重调校正,提高整个系统的导航精度,延长惯导系统的重调周期。
根据量测方程建立的模式不同,该方法又可以分为位置速度匹配、重力异常匹配方式、重力梯度匹配方式、重力异常和重力梯度联合匹配方式和重力垂线偏差匹配方式等多种方式。
相关匹配方式是通过实测量序列与数据图中所有可能的基准序列进行相关,计算实测数据和基准序列的相关度,然后将最相关的基准序列对应的位置定位为匹配位置。
基本的相关算法有:平均绝对差算法、平均平方差算法和乘积相关算法等。
目前国外见于报道的相关匹配方法主要是I CCP (theIterated C l o sest C ontour Po i n t)匹配算法[9],I CCP 算法来源于图像的配准,主要是通过最近点的迭代实现测量图像与模型之间的对准和匹配。
其缺点主要包括两个方面:a .要求重力传感器没有测量误差,最终准确匹配到与测量重力值具有相同重力值的点上;b .要求目标点选取为相同重力等值线上与惯导提供的概略位置点最接近的点,这就要求真实航迹必须在提供的概略位置很近的位置的上。
基于这两55海洋重力场在潜艇导航中的应用 陈勇 吴太旗 胡德生方面的缺点,在一些时候容易产生多值性,出现误配现象,导致匹配失败。
另外,该方法利用点集的旋转平移交换进行匹配,降低了匹配的实时性。
为此,国内也有不少学者提出了改进方法[10,11],提高了相关匹配算法的可靠性和适和性,有一定的借鉴作用。
4结束语随着现代反潜技术的提高,潜艇受到的挑战越来越大,隐蔽和精确导航是潜艇发挥战斗力的保证。
基于重力场辅助的惯性导航技术就是这种绝对无源的导航定位技术,具有极高的军事价值和发展前景。
同时海洋重力参数作为潜射导弹的一个重要参数,是保证精确打击目标的基础,具有不可忽视的作用。
由此可见,海洋重力在潜艇中具有非常重要的作用。
目前,很多国家都在进行这方面的探索和研究,美国和俄罗斯已经投入了实际应用,而我国还处在预研阶段,有多所大学和海军科研院所正在进行这方面的研究。
参考文献[1]R i ce H,M end el s ohn L,Robert Aarons R,M azz ola D.Next gen era-ti on m ari ne preci S i on nayi gation s yste m[A].I EEE:Positi onLoca-ti on and N ayi gati on Symposiu m[C],2000:200~205.[2]熊正南,蔡开仕,武凤德等.21世纪美国战略潜艇导航技术发展综述[J].舰船科学技术,2002,24(3).[3]祝勇刚,徐正扬.惯性测量系统的理论与应用[M].测绘出版社,1989,127~128.[4]董绪荣,张守信,华仲春.GPS/I NS组合导航定位及其应用[M].湖南长沙:国防科技大学出版社,1998,86~88.[5]董绪荣,宁津生,祝勇刚.惯性定位中扰动重力矢量的影响[J].中国惯性技术学报,1991,(2):50~55.[6]吴太旗,边少锋,蒋勃等.重力场对惯性导航定位误差影响研究与仿真[J].测绘科学技术学报,2006,23(5):341~344. [7]李建成,陈俊勇,宁津生等.地球重力场逼近理论与中国2000似大地水准面的确定[M].武汉大学出版社,2003,53~55. [8]王树甫.重力梯度仪及其与惯导组合技术的研究[D].哈尔滨工程大学博士学位论文,2002:14~18.[9]Behzad Ka m gar-Par s,i Beh rooz Ka m gar-Par s.i Veh icl e local-ization on gravity m aps.Part of t h e SP I E Con ference on Unm annedG round Veh i cle Technol ogy,1999,SPI E3693(4):182~191.[10]刘繁明,孙枫,成怡.基于I CCP算法及其推广的重力定位[J].中国惯性技术学报,2004,12(5):36~39.[11]吴太旗,黄谟涛,边少锋等.直线段的重力场匹配水下导航新方法[J].中国惯性技术学报,2007,15(2):202~204.天津市航海学会2008年度获奖情况1、/学会之星0天津市科协为总结推广本市各学会在新形势下组织建设、能力建设、实力建设等方面的先进经验,表彰2006-2007两年来在为经济社会发展服务、为提高全民科学素质服务、为广大科技工作者服务等方面做出突出成绩的学会和学会工作人员,在2008年1月31日召开的/天津市科协2008年学会工作总结会议0上授予天津市航海学会/天津市科协2006-2007年度学会之星0荣誉称号。
学会副秘书长、学术工作委员会主任袁洪满同志被授予/学会工作先进个人0荣誉称号。