一种太阳方位跟踪器控制系统的设计
太阳能自动跟踪发电控制系统开发与设计
太阳能自动跟踪发电控制系统的开发与设计摘要:当前,由于技术条件限制,光伏发电的转换效率很低,严重制约了太阳能发电的发展与普及,因此,在现有条件下,寻求一种实用的方式去提高太阳能的发电效率是非常必要的。
实践证明,太阳能的发电效率和太阳能电池板与太阳光线的角度有很大关系,太阳能发电中,太阳能电池板实时和太阳光线保持垂直能在很大程度上提高太阳能的发电效率。
本文针对如何提高太阳能发电效率的问题,提出了采用自动跟踪的方法,让自动跟踪系统对太阳的运动轨迹作出实时判断,从而使太阳能电池板实时和太阳光线保持垂直,提高光伏转换效率。
关键词:太阳能;自动跟踪;发电控制系统;开发与设计中图分类号:tk511 文献标识码:a 文章编号:1.引言地球上,无论何处都有太阳能,可以就地开发利用,不存在运输问题。
同时,太阳能也是一种洁净的能源,在开发和利用时,不会产生废渣、废水、废气,也没有噪音,更不会影响生态平衡。
但是,太阳能的利用有它的缺点:一是能流密度较低,日照较好的,地面上1平方米的面积所接受的能量只有1千瓦左右。
往往需要相当大的采光集热面才能满足使用要求,从而使装置地面积大,用料多,成本增加。
二是受大气影响较大,给使用带来不少困难。
本文设计一种基于gps定位及太阳方位计算的的太阳自动跟踪装置,该装置能自动跟踪太阳的运动,保证太阳能设备的能量转换部分所在平面始终与太阳光线垂直,提高设备的能量利用率。
与此同时加以风力发电机辅助发电给蓄电池充电,进而在夜间给路灯提供电源。
2 太阳能自动跟踪系统硬件设计2.1 太阳能自动跟踪系统的机械构成及工作原理太阳能自动跟踪系统的机械结构由太阳能电池板、减速电机、齿轮传动机构、基座等构成。
基座主要支撑和固定太阳能自动跟踪器。
当太阳照射角度发生变化时,垂直方向(y)和水平方向(x)的减速电机就会相应的通电转动,通过齿轮机构传动使太阳能电池板始终与太阳光线垂直,即获取到最大的太阳光照能量。
整个装置由机械部分和控制部分组成。
一种新型太阳跟踪装置的机构设计

性 。 该 装 置 制 造 和 运 行 成 本低 , 有 很 高的 性 价 比 , 具有 广 阔 的应 用前 景 。
关键词 : 太阳能 跟踪 机构 设 计
中图分类号: T H1 2 2
文献标识码: A
文章 编号 : 1 0 0 0 — 4 9 9 8 ( 2 0 1 3 ) 0 7 — 0 0 1 5 — 0 4
度 角是 太 阳光 线与 地表 水平 面之 间 的夹 角 :
s i n a=s i n  ̄ b s i n 6+ c o s 西c o s 6 c o s ( 1 )
机构 设 计 为 : 高 度 角 调 整
机 构 实 现 南 北 方 向 跟 踪 太 阳 . 方 位 角 调 整 机 构 实 现东 西 方 向跟踪 太 阳 . 其
随着 太 阳能 不 断地被 开 发 利用 。太 阳跟 踪技 术越
s i n y:— c o s S s i n o J
—
( 3)
显 必 要 。 太 阳 跟 踪 方 式 通 常 有 传 感 器 跟 踪 和 日历 跟 踪
模 式 …. 一 般 在 太 阳辐 射 辐 照度 较 低 、 传感 器 跟 踪 模式
2 调 整 机 构 的设 计 计 算
北 京 市 属高 等学 校 人 才强 教 计 划 项 目( 编号 : P HR 2 0 1 1 0 8 3 6 3 ) 收 稿 日期 : 2 0 1 3年 3月
・ — - 一 -
2. 1
驱 动 电机选择
+
-+
-
4 结 论
1 )通 过 对 某 型 松 土 器 建 立 实 体 模 型 , 分 析 各 零 部
件 结 构 受 力 , 在 有 限 元 技 术 分 析 软 件 S o l i d Wo r k s
一种太阳能电池自动跟踪系统的设计
8 3 0I
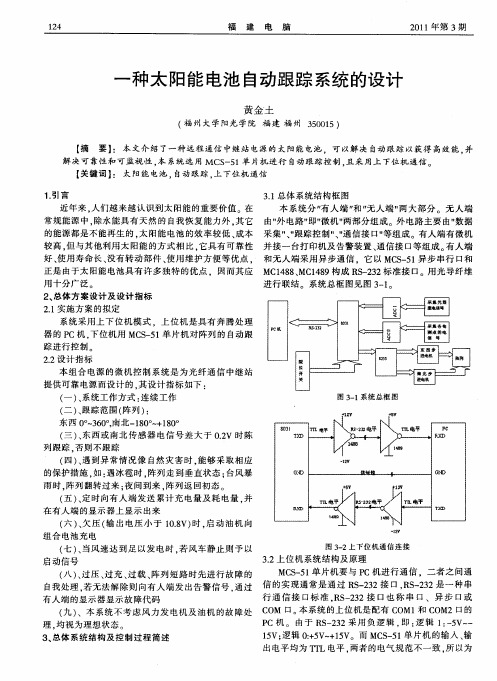
图 3 1 统 总框 图 - 系
p C
( )东 西或 南北 传 感器 电信 号差 大 于 0 V 时 陈 - 、 . 2 列跟踪 . 否则 不跟踪 ( 、 到异 常情 况像 自然灾 害 时 . 四) 遇 能够 采取 相应 的保护措 施 , : 如 遇冰雹 时 , 列走 到垂 直状 态 ; 阵 台风暴
图 3 2所 示 。 —
这 样 就 把 MC 一 I的 串行 端 口 (XD和 R D) S5 T X 转
负载
换成标准的 R 一3 S 2 2接 口 .只要 用 一 根 通 信 电 缆将 该 通 信 端 口与 P C机 的 C M E连 接 起 来 。 写 好 通信 软 O I 编 件 . 者就 可 以通信 了 二 本 系统 主要 工作 都 在无人 端 f 位 V ) 行 。 下 L进 外接 一 通 信接 V 的有人 端f 位V ) I 上 t主要完 成 如 下功 能 : ( ) 在接 收 到无 人端 的告 警信 号 时 , 制 指示 灯 一 、 控 亮 并发 出告 警信 号 , 由打 印机 打印 出相 应 的信 息 。
O 本 系统 的上位机是 配有 C M1 C M2口的 O 和 O ( ) 九 、本系 统不 考虑 风 力发 电机及 油机 的 故 障处 C M 口 P C机 。 由于 R 一 3 S 2 2采 用 负 逻 辑 . : 辑 1 … V 即 逻 :5 理。 均视为 理想状态 。 1V; 5 逻辑 0+ V + 5 :5 1V。而 MC 一 1 片机 的输 入 、 S5 单 输 3 总体 系统结构 及控 制过程 简 述 、 出电平均 为 1 L电平 . T 两者 的 电气规 范不 一致 。 以为 所
基于光强感知的太阳跟踪系统设计

DOI:10.16660/ki.1674-098X.2019.08.118基于光强感知的太阳跟踪系统设计①顾俊林 张同杰 王梓毅 杜祎倩(中国民航大学电子信息与自动化学院 天津 300300)摘 要:太阳能作为一种新兴无污染的可再生能源,近些年来受到人们的广泛关注。
太阳位置的变化会导致太阳能板表面光照强度的变化,对发电效率的影响较大。
为解决上述问题,本文设计了一种能够自动追踪太阳位置的高效率光伏充电系统。
通过光强感知模块检测太阳的实际位置来控制转台的水平与垂直方向的转动角度,调整光伏电池板使其跟随太阳位置变化而移动,实现太阳光能转化效率的最大化。
关键词:光强感知 太阳能 自动追踪中图分类号:TP212.9 文献标识码:A 文章编号:1674-098X(2019)03(b)-0118-02①课题来源:“中国民航大学大学生创新创业训练计划”项目研究成果(项目编号:201810059031)。
作者简介:顾俊林(1998,2—),男,汉族,江苏盐城人,本科在读,研究方向:光伏发电。
光伏发电具有清洁性、安全性、经济性以及免维护性等显著优点[1]。
目前,太阳能电池板一般采取固定安装方式,无法保证太阳光实时垂直照射,导致太阳能资源无法得到充分利用[2-3]。
为进一步提高太阳能的转换效率,本文设计了一种可以自动跟随太阳光照的装置,保证太阳能电池板所在的平面始终与太阳光线垂直,从而提高设备的发电效率。
1 系统总体架构系统总体架构如图1所示,由两个功能部分组成:光照采集部分、转台部分。
光照采集部分由光照传感器和太阳能板组成,本系统通过光照传感器对光的感知从而判断太阳垂直照射的方向,并将信息传给主控板然后通过舵机控制转台进行双轴追踪。
2 太阳光强感知模块设计本文利用光敏电阻的阻值与电压之间的变化关系检测太阳光的强度,设计的太阳光强模块如图2所示。
如图2所示,将光敏电阻与固定阻值的电阻串联并外接电压,使光照变化导致的光敏电阻阻值的变化转变成电压的变化,并将此电信号传递给控制电路用于判断和处理。
太阳能自动跟踪系统的设计与实践
1 引 言 .
方 面 也 应 该 抓 住 机 遇 , 进 行 相 应 的基 础 池充 电,进而在夜间给路灯提供 电源 。
传统 的燃料 能源正在一天天减 少,
研究和应用开 发,为开设相关 的专业做
2 太阳能自动跟踪 系统硬件设计 . 2 i 太 阳能 自动跟踪系统 的机械 构 . 太 阳能 自动跟踪系统 的机械结构 由 太 阳能 电池板 、减速 电机 、齿轮传动机
描述 的硬 件 电路 实现 。
【 Al r op rt nNisI ls rga 6 t aC roai . o IFahP ormme e ] e o rUsr
Gu d . 0 . i e 2 09
其在 目前 的多媒体娱乐市场上 具有 很高
的 竞 争 力 ,并 且 应 用 前 景 广 泛 。用 基 于
文设计一种太 阳能自动跟踪 系统,其 能根据 太阳相 对地球运动轨迹的规律 ,控制太 阳能板 自 实时跟踪太 阳方位 ,保 持太阳能电池板始终与太 阳入射 光线垂直 , 动
从而保持较高的太阳能利用率 。本文重 点叙述太阳能 自动跟踪控制系统的硬件与软件设计与实践的内容。
【 关键词 】太阳能; 自 动跟踪 ;G S P ;单 片机
政策 ( T )续延2 6 。太 阳能光伏 发 位计算的 的太 阳 自动跟踪装置 ,该装置 动作等 。 IC -年 电和风 电在我 国是一个新兴事物 ,光 伏 能 自动跟踪太 阳的运动 ,保证太阳 能设 产业让 国内企 业看 到了机遇 ,而 且该产 备的能量转换部分 所在平面始终与太 阳
[] t aC roainNisI S f r vlpr s 5AJr op rt . o I ot eDeeo e e o wa
基于单片机的太阳跟踪控制系统设计

太阳跟踪控 制系统 由 A tm ega16 单片机、电 源电 路、光电传感器、信号调理电路、显示电路、步进电机、 按键电路、DS1302 电路、JTAG 接口 调试电路、RS232 等模块组成, 系统硬件原理框图如图 1所示。
工作原理: 由 A tm ega16 单片机电路循环检测, 通 过光电传感器所采集的信号判断工作模式, 晴天时选 择光电跟踪模式, 反射太阳光线投射到光电传感器上 输出 4路微弱的电流信号经过运放电路后, 输出 4路 电压信号, 输入给 A tm ega16单片机, 经过数据处理后, 给出控制信号实现对步进电机的高位角和方位角的旋 转跟踪, 进而实现了对太阳的高度角和方位角的实时 精确跟 踪。阴雨 天时选 择视 日运 动轨 迹跟踪, 通 过 DS1302读取当前的时间, 根据当地的经纬度 ( 由 GPS 测得 ), 以及太阳高度角和方位角的计 算公式计算当 前太阳的高度角和方位角, 由 A tm ega16单片机输出控
收稿日期: 2010- 06- 12 基金项目: 浙江省科技计划重点项目资助 ( 2006C21053) 作者简介: 马建华 ( 1985- ) , 男, 河南周口人, 主要从事太阳能热发电方面的研究. E m ai:l m axiao163163@ 163. com 通信联系人: 潘玉良, 男, 教授, 硕士生导师. E ma i:l ylpan01@ 126. com
1. 2 光电跟踪
光电跟踪原理: 由于一天之中, 太 阳位置不断改 变, 太阳光照强度的变化引起光电转换器输出电信号 的改变。将电信号的变化进行分析、判断、处理, 用以 驱动步进电机运转以改变跟踪装置位置, 达到准确聚 集太阳光的效果 [ 7 8 ] 。
此跟踪控制的优点是跟踪精度较高, 缺点是当出 现多云天气时, 感光元件在稍长时间段接收不到太阳 光, 可能导致跟踪系统的控制失效, 甚至引起执行机构 的误操作, 从而影响跟踪精度 [ 9] 。
基于单片机的太阳跟踪控制系统设计

De i n o un t a k ng s s e a e n S sg fa s -r c i y t m b s d o CM
MA Ja — u in h a,P AN —in Yu l g a
( o eeo c ai l nier g H n zo i z U i ri ,H nzo 0 , hn ) C l g f l Meh nc g e n , a ghuDa i nv sy a gh u3 C ia aE n i n e t 1 1 0 8
Absr c :Tr d t na y o h u r c i o r lus a l e rt l a st y o o o lc rc ta k n rs n a l r c i o to ta t a ii lwa fte s n ta kng c nto u ly s pa aey tke he wa fph te e ti rc i g o u nge ta kng c nr l o s se ,bu ta wa s h slwe rc n r cso y tm ti l y a o rta kig p e iin,lr e c multv Ⅱo sa d o h rs o to n s I r rt mp o e te a c r c fta k ag u a ie e r n t e h rc mi g . n ode oi r v h c u a y o c ‘ r igt u n he s n,e i n t c u l to lo nd i r v he u i z to fs lre e g lmi ae a c mu ai n eT ra mp o e t tl ai n o oa n r y,a s lrta k n o to y tm sde in d b s d o i oa r c i g c n rls se wa sg e a e n
基于F28335的太阳跟踪控制器设计及应用

由此 脉 冲个数 Ⅳ 以及 P WM 的时基 频率 厂可计 ,
算 出系 统 的 P WM 周期 。计算 方 法如下 :
赤
V
() 7
射 经 度
即系统 每隔 m秒 装 载一 次 e WM 周 期寄 存器 , P
从 而实 现对 e WM控 制脉 冲个数 的确 定 。 P
其 中 ,。 mo h和 均为 真太 阳时 的小时 和分钟 。
审 匝塞
图 2 太 阳 跟 踪 控 制 系 统 硬 件 结 构 图
Fi. Had r t cue o es nt c igc nml y tm g2 rwae sr tr f h u r kn o t se u t a s
c l p n l c n b lc d h r o tl a tmaial h n t e e a e sr n n s el a es a e p a e o z n a uo t l w e h r r to g wid . i c y Ke r s D P; W M ;oa r c i g c n r l r c n e t t g p oo o ac y wo d : S P s lr ta kn o t l ; o c nr i h tv h i oe an
太 阳 能 光 伏 发 电 是 太 阳 能 利 用 的 主 要 途 径 之
一
.
但 目前 光 伏发 电Ⅲ 率低 、 制 约其 发 展 的关 键 效 是
1 太 阳跟 踪 控 制 器 的原 理 及 设 计
采用 聚光 式 电池 可 以提高 能量 密度 ,从 而提 高
太 阳能接 受效率 ,但 需要 较高精 度 的太 阳跟 踪控制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运 动轨 迹跟 踪和光 电跟踪 相结 合是 在视 日运动 轨
池 的发 电效率 低 , 因此 , 们开 始研制 多方 向收集 人
太 阳能 的太 阳方 位跟 踪 器 来解 决 这 一 问题 . 轴 单 太 阳跟踪 器研 制始 于 19 9 7年 , 跟踪器 能对 太 阳 此
第1 期
陆仲达 , : 等 一种太 阳器控制 系统 装置 如 图 2所 示. 太
东
南
图 1 改进 后的光电位置传感 器
在本 设计 方 案 中 , 电传 感 器 安 放在 暗筒 壁 光 外东 、 、 、 南 西 北成 十字形 对称 安装 四个 光敏元 件 ,
摘要 : 过分析太 阳运行规律 , 通 设计 了太 阳位置传感器. 采用两级传感器方式 , 实时检测太 阳方位. 利用简单光
敏 电阻和 S C 0 1 P E 6 A单片机设计 了一种多方 向太阳能收集 控制系统 , 实现 了大范 围高精度地跟 踪太 阳. 经试 验, 系统 的高度角 和方位角跟踪范围在 0~10 和 0~ 7 。跟踪精度达到 1. 8。 20 , 0 关键词 : 阳跟踪装置 ; 阳方位检测 ; 太 太 跟踪传感器 ; 单片机控制系统
收稿 E期 :0 11 9; 回 1期 :0 11—2 1 2 1—1) 修 4 3 2 1 —21
作者简介 : 陆仲达( 9O ) 男 , 17一 , 黑龙江哈尔滨人 。教授 , 硕士 , 主要从事控制理论及应用 、 信号处理 、 算机控制 、 能控制等方 面 计 智
的研 究 。E m i: —hnd @ 13 CI。 - al】 zoga 6 .Ol u l
但 是这 种控制 模式 因没有 明确 的轨迹 坐标计 算 公 式 , 制难 度 大 , 研 且控 制 系 统结 构 复 杂. 电跟 踪 光
是 采用 光 电传 感器 与太 阳进行 实时信 息交 互 的方 式 跟踪 太 阳运 作 的 , 过方 位 检 测器 检 测 太 阳 当 通 前 的方位 , 由信 号 驱 动 执 行 机 构 实 现 跟 踪 J 系 . 统 的跟 踪精度 由传感 器 精 度 决定 , 只有 聚焦 的 光 斑 能被 光敏元 件 采集 时才 可 以跟 踪 太 阳 , 感 器 传
使 用.
1 太 阳跟 踪 控 制模 式
2 太 阳跟 踪 器 结 构 设计
目前 国内外跟 踪太 阳的控 制模式 主要 有光 电 跟 踪 、 E运 动轨迹 跟踪 、 H运动 轨迹跟 踪与 光 视 t 视 电跟踪 相结 合 的双模式 跟踪 三种 . 视 日运 动轨迹 跟踪 是依据 太 阳的 固有 运行 轨 2 1 传感 器阵 列结构 设计
鲁东 大学学报 ( 自然科学版 )
L dn nvri ora( a rl c neE io ) u ogU i syJunlN t a Si c d i e t u e tn
一
种 太 阳 方 位 跟 踪 器 控 制 系统 的 设 计
陆仲达 , 田群 宏 , 张金 龙
( 齐齐哈尔大学 计算机与控制工程学院 , 黑龙江 齐齐 哈尔 1 10 ) 6 0 6
正. 这样 就 可 以在 复 杂 多 变 的天 气 条件 下 可 靠 稳 定 地 跟踪 太 阳. 这种 跟 踪 方案 精 度 高 , 行 稳 定 , 运 被 应用 于许 多大 型太 阳能光伏 电站 的太 阳跟踪 装
双 轴跟 踪器 ¨ . J双轴 跟 踪 器 的太 阳能 光能 收 集 效
率 比 单 轴 或 固 定 方 式 分 别 提 高 5 ~1 % 和 % 0
.
为 了降低成 本 , 高跟踪 的可 靠性 , 提 设计 采用
迹 , 立不 同时刻 、 同地理位 置太 阳 的高度角 一 建 不 方 位 角信息 数据 库 , 用 数据 主 动 跟踪 太 阳的 一 调
种 模 式. 了直 观 观察 太 阳 , 为 跟踪 采 用地 平 坐标 .
光 电跟踪方 式 , 方位 检测传 感器 采用 两级 布置 , 但 其结 构如 图 1 所示 ・
中 图分 类 号 :K 1. ;P 7 T 53 4 T 23 文献标志码 : A 文 章 编 号 :6 38 2 (0 2 0 -0 80 17 — 0 2 1 )10 1 -5 0
太 阳能光 伏发 电是新 能源研 究领 域 的热 点 问 题 之一 , 目前 太 阳能 光伏 发 电装 置 中太 阳能 电池 板 阵列 多数是 固定 的 , 在一 天 中的绝 大 部 分 时 间 里 太 阳光线无 法垂 直 射 入 太 阳能 电池 板 , 光伏 电
5 % _J 随着 0 2
.
自动控制技 术 的发展及控制 成本 的降
低 , 确跟踪太 阳方位 角和高度角 的双轴 跟踪技 术 精
成 为研究的热点 , 文正 是基于这一热点 问题进 行 本
研 究的.
置 中. 其 存 在 的缺 点 是 计 算 过 程 十 分 复 杂 , 但 而 且 高精 度角 度传 感 器 成本 很 高 , 目前 尚难 以推 广
用 来粗 略判 断太 阳位 置 , 解决 了传 统 跟 踪传 感 器
跟踪范 围小 的 问题 . 圆筒外 部东 、 、 、 四个 在 南 西 北
方 向分 别安 装 四个 参 数相 同 的光 敏 电 阻 , 敏 电 光
阻G 1和 G 4东西 对称 安装 在 暗筒外 侧 , 用来 粗 略 检测 太 阳方 位 ; 光敏 电阻 G 5和 G 8南北 对称 于 圆
进 行东 西方 向 的 自动 跟 踪 , 阳能接 收 器 的热 接 太
收 率可 提高 1% .98年 在 美 国加 州 , 功研 制 5 19 成
出在太 阳能 面 板 上 安 装 有 集 中 阳光 透镜 的 A M T
迹 跟踪 的基 础上 加装 角度 传 感器 , 角度 传 感 器 是 工 作 台的信 息反 馈元 件 , 程 序 进 行 累积 误 差 修 对