基于DSP2812的电动机测速方法的研究
基于DSP TMS320F2812的变频调速控制系统
Igtt f n ier g i ga 1 11C i ) n tue0 g ei ,x舢I n4 10 , hn i E n n t a
Abta tIt d c dpicpeo aibef q e c n pe i T sr c:nr u e r il fvr l e u nya d Bed wt D C,pee td dsg to ftec nrlss m’ sf a ̄ o n a r h rsne e i meh do o t yt s ot l n h o e w a dh rw r ici wt M 3 0 2 1 T emeh d uizd cmpee h el yp r h rl n ih se d cluai u cino n ad aec ut i T S 2 F 8 2. h to ti o ltl te w at e p easad hg p e aclt n fn t f r h le y h i o o
S se o ra l e u n y a d y tm fVa ib eFr q e c n S e d Co to s d o P TM S 2 F 8 2 p e n r lBa e n DS 3 0 2 1
T NG Y n - i A o g q
( H咖
断程序流程 图。实验表 明 :M .021 的 高速性能使 系统控 制的 实时性和精 确性得到 了很 大的提 高, 、 态性能得 到 T S2F82 3 动 静
基于DSP2812的实验开发板设计

Abstract
This design is the DSP (2812) Minimum system design, DSP is a widely used but many disciplines involved in many areas of emerging disciplines. We often say that the DSP refers to the digital signal processor. Digital Signal Processor is a complete cross-signal processing for the processor. Since the 60s of the 20th century, with the computers and the rapid development of information technology, DSP technology and the rapid development emerged. In the past twenty years time, digital signal processing in communications and other fields has been very widely used.
DSP of the component value of tolerance is not sensitive to temperature, and environment outside involvement affect small; easy integration; VLSI can be time-division multiplexing, shared processor; facilitate the adjustment of the processor factor to achieve adaptive filter; to analog processing can not Implementation of functions: linear phase, multirate processing, cascade, easy storage; can be used to frequency of very low signal. Keywords: Typical characteristics; Architecture;院毕业设计
DSP2812电机控制
第7章 TMS320F2812/2810的应用实例7.1TMS320F2810在永磁同步电机驱动器中的应用永磁同步电机PMSM 具有体积小、重量轻、维护简单、效率高等优点。
目前,以PMSM 为控制对象的交流伺服系统在数控机床、工业机器人、航空航天等领域得到了广泛应用。
交流伺服系统是电流、速度、位置三闭环控制系统。
全数字化交流伺服系统对这三个控制环全部采用数字化控制,不仅简化了系统结构,而且能实现信息存贮、监控、诊断以及分级控制的智能化功能,具有参数整定容易、功能强大、修改灵活等优点。
本节介绍了作者研制的以TMS320F2810为核心的全数字化闭环控制的通用永磁同步电机驱动器。
7.1.1 永磁同步电动机数学模型和矢量控制方法从电机学理论可知,三相电机定子绕组中通入三相电流t I i a a 1cos 2ω=,)120cos(201−=t I i b b ω,)120cos(201+=t I i c c ω时,其相应的基波磁势在空间(圆周方向空间电角度θ坐标)及时间(t 坐标)的二元表达式为:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧−−=−−==)240cos()240cos(22),()120cos()120cos(22),(cos cos 22),(0100101t N NI t f t N NI t f t N NI t f pc c pb b pa a ωθπθωθπθωθπθ(1)其中,θ的坐标原点选在A 相绕组的轴线(中心线)上。
为的有效值,N 为每相绕组的有效匝数。
为电机极对数。
c b a I I I ,,c b a i i i ,,p N 当I I I I c b a ===时,其合成磁势是一个圆形的空间旋转磁势。
)cos(23),(),(),(),(1θωπθθθθ−=++=t N INt f t f t f t f pc b a s (2)可见,旋转磁势的幅值始终在θω=t 1处,即时间上经过了多少度,旋转磁势的幅值就在空间转过了多少度。
dsp2812实验报告
实验一CCS 环境认识实验一、实验目的1、了解CCS软件操作环境和基本功能。
2、掌握CCS 软件仿真的配置步骤。
二、实验设备PC 机一台,安装有Code Composer Studio3.3 软件。
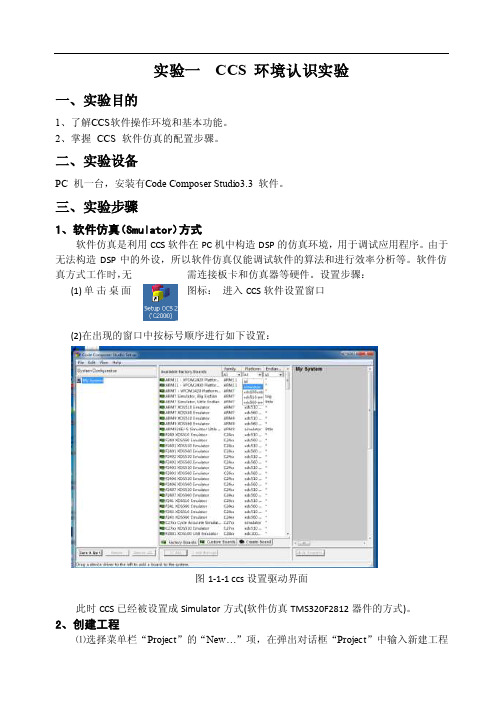
三、实验步骤1、软件仿真(Smulator)方式软件仿真是利用CCS软件在PC机中构造DSP的仿真环境,用于调试应用程序。
由于无法构造DSP中的外设,所以软件仿真仅能调试软件的算法和进行效率分析等。
软件仿真方式工作时,无需连接板卡和仿真器等硬件。
设置步骤:(1)单击桌面图标:进入CCS软件设置窗口(2)在出现的窗口中按标号顺序进行如下设置:图1-1-1 ccs设置驱动界面此时CCS已经被设置成Simulator方式(软件仿真TMS320F2812器件的方式)。
2、创建工程⑴选择菜单栏“Project”的“New…”项,在弹出对话框“Project”中输入新建工程名volume;并设置工程所在目录。
⑵选择菜单“Project”的“Add Files to Project…”项将volume.c源程序文件、volume.cmd 命令文件。
注:头文件可以在编译时根据程序中的“include”语句自动加入。
3、查看源程序双击左侧工程管理窗中的“volume.c”文件,可以查看程序内容。
这个程序是一个音频信号采集、处理输出的程序。
其功能是将输入的音频数据扩大volume倍后输出。
4、修改工程设置将程序中的用户堆栈的尺寸设置成 1024 (字):点击菜单栏Project→Build Options,在弹出的Bulid Options for volume.pjt对话框中点击Linker标签,在Category栏中选中Basic项,并在其右侧的Basic设置里将Stack size (-stack)的值改为1024,点确定后保存。
5、编译选择菜单“Project”的“Rebuild All”项,对当前工程中所有文件进行编译链接,形成输出文件,注意编译过程中CCS主窗口下部的“Build”提示窗中显示编译信息,如给出的错误和警告的信息。
基于TI2812DSP的无刷直流电动机控制软件设计
三江学院本科毕业设计(论文)题目基于TI2812 DSP的无刷直流电动机控制软件设计电气与自动化工程学院院电气工程及其自动化专业学号B05071006学生邢小强指导教师熊田忠起讫日期2009年2月23日至2009年5月25日设计地点L422摘要无刷直流电机既具有直流电机结构简单、运行可靠、维护方便等一系列优点,还具备交流电机运行效率高、无励磁损耗及调速性能好等诸多优点,现已广泛应用于工业控制的各个领域。
本文在对无刷直流电动机调速系统的发展及应用综述的基础上,介绍了采用DSP芯片对无刷直流电动机进行换向与转速控制的微机控制系统。
文中给出了系统的总体设计方案,分析了无刷直流电机的工作原理、控制电路、驱动电路,提出了软件控制无刷电机的策略。
阐述了软件框架的基本结构以及各个模块的具体设计方法。
文中还对DSP芯片(TMS320F2812)进行了一些介绍。
最后运用实际的硬件平台以及上位机软件(LabVIEW)对无刷直流电动机进行监控,证明了该系统工作良好,达到了预期目标。
关键词:无刷直流电动机,DSP芯片,软件控制AbstractBrushless DC motor with a DC motor is simple in structure, reliable operation, easy maintenance, such as a series of advantages, also has high efficiency AC motor run, no excitation loss and good speed, and many other advantages, has been widely used in various industrial controlfield.This article in the brushless DC motor speed control system overview of the development and application on the basis of the paper introduces the DSP chip on the exchange of brushless DC motor and speed control to the Microputer Control System. In this paper, the overall design of the system program, analysis of the brushless DC motor working principle, control circuit, driver circuit, a software strategy for brushless motor control. Framework set out the basic structure of software modules, as well as the specific design methods. The article also DSP Core (TMS320F2812) to introduce a number.Finally, the use of the actual hardware platform, as well as PC software (LabVIEW) for brushless DC motor control, show that the system is good, reaching the target.Keywords: brushless DC motor, DSP chips, Control Software目录第一章绪论- 1 -1.1 无刷直流电动机的发展现状- 1 -1.2 DSP与无刷直流电动机的联系- 2 -1.3 本文研究的容- 3 -第二章无刷电动机的结构及工作原理- 3 -2.1无刷直流电动机的结构- 3 -2.2无刷直流电动机的工作原理- 4 -第三章电机控制中的DSP的特点和选择- 6 -3.1 TMS320F2812的简介- 6 -3.2电机控制中的DSP的特点- 8 -3.3 DSP软件设计特点- 10 -3.3.1 DSP开发环境CCS2000- 10 -3.3.2 C语言与汇编语言的分析比较- 10 - 第四章电机控制中的DSP软件设计- 11 -4.1 各模块的程序及说明- 11 -4.1.1系统时钟的初始化模块- 11 -4.1.2 事件管理器EV的初始化模块- 12 -4.1.3 串行通讯SCI的初始化模块- 15 -4.1.4 输入捕捉(CAP)中断- 16 -4.1.5定时器T1- 19 -4.1.6 DSP与上位串口通信协议- 19 -4.2 DSP程序的总体框架- 21 -第五章结论及展望- 21 -5.1 结论- 21 -5.2 展望- 22 -参考文献- 22 -致- 23 -第一章绪论1.1 无刷直流电动机的发展现状直流电动机具有很多优点,如优秀的线性机械特性、宽的调速围、大的起动转矩、简单的控制电路等,长期以来一直广泛地应用在各种驱动装置和伺服系统中。
DSP基于TMS320F2812的电动汽车驱动系统设计论文

DSP基于TMS320F2812的电动汽车驱动系统设计论文————————————————————————————————作者:————————————————————————————————日期:2基于TMS320F2812的电动汽车驱动系统设计姓名陈逸武学号11226214班级自动化三班指导老师王坚完成日期2014/5/20目录第一章引言..。
.。
.。
.。
.。
...。
..。
.。
....。
..1第二章驱动系统的硬件设计......。
......。
..。
.。
.。
.。
22。
1 控制电路设计.。
..。
.。
.。
.。
......。
..。
..。
2 2.2 功率主回路的设计...。
..。
.。
.....。
.。
.。
.。
.。
.。
..。
2 2。
3 滤波整形电路设计..。
...。
....。
.。
.。
...。
.。
.....。
3第三章系统的控制策略.....。
.。
....。
.。
.。
...。
..。
43.1速度计算和调节..。
.....。
..。
.。
..。
.......。
.。
.。
4 3。
2电流计算和调节。
.。
...。
.....。
.。
..。
..。
....。
4第四章系统的软件设计..。
.。
....。
...。
.。
..。
.。
..。
.。
5笫五章实验结果与结论.。
.。
.。
.。
...。
..。
....。
.。
.。
6致谢。
......。
..。
....。
..。
.。
.。
.。
...。
(7)参考文献。
.。
.。
...。
.。
.。
..。
.。
.。
.。
....。
.。
(8)附录 tms320f2812引脚图。
...。
.。
.。
.......。
..。
(9)摘要针对当前电动车运行效率低,稳定性差的特点,提出了新型电动汽车驱动系统的设计方法.系统以高性能DSP 芯片TMS320F2812作为控制核心,通过传感器实时采集相电流和转子转速信号,从而实现模糊正比例算法的双闭环控制。
实验结果表明,该系统具有性能好、结构简单、可靠性高等特点。
关键词:电动汽车;无刷电机;驱动;双闭环控制AbstractIn view of the current characteristics of the development of electric vehicles,a new type of small and medium—sized electric vehicle drive system is designed. Ahigh-performance DSP chip TMS320F2812 is used as control core,through ther eal—time sampling of the phase current and rotor speed signal by sensor,the do uble—loop control is achieved。
基于DSP2812的无刷直流电机调速系统设计
基于DSP2812的无刷直流电机调速系统设计李燃;原明亭【期刊名称】《工业控制计算机》【年(卷),期】2015(000)001【摘要】介绍了无刷直流电机的基本组成、工作原理和数学模型,以DSP TMS320F2812芯片为核心,完成了控制系统的主电路、控制电路、驱动电路、检测电路和保护电路的硬件设计和主程序及相应的中断服务程序的设计,并给出了样机运行的实验结果。
%In this paper,the detaiIs of brushIess DC motor component,fundamentaI principIe and mathematicaI modeI is introduced, the brushIess DC motor speed controI methods are anaIyzed and studied.The motor speed controI system is studied on base of 32-bit fixed-point DSP TMS320F2812.Hardware design incIudes:the overaI scheme of hardware,the main circuit, controI circuit,driver circuit,protection circuit and the detection circuit.Software design being conducted,the main program and the corresponding interrupt service program are finished.So that,the programs are modified,debug,and transpIant easiIy.【总页数】3页(P139-141)【作者】李燃;原明亭【作者单位】青岛大学自动化工程学院,山东青岛 266073;青岛大学自动化工程学院,山东青岛 266073【正文语种】中文【相关文献】1.基于C#的无刷直流电机变频调速监控系统设计 [J], 朱保鹏;胡红东;焦树盛;张安妮;魏海峰;2.基于FPGA的无刷直流电机调速系统设计与实现 [J], 李国旭;毛红艳;孟祥斌;赵海波3.基于TMS320F28335的无刷直流电机调速系统设计 [J], 范守高;单春贤;陈景芳4.基于无刷直流电机的光电扫描调速系统设计 [J], 王秋瑶; 易明; 鹿泽伦5.基于智能调节器控制的无刷直流电机调速系统设计 [J], 李春峰;于洋;张祥因版权原因,仅展示原文概要,查看原文内容请购买。
TMS320F2812在电机控制系统的应用
TMS320F2812在电机控制系统的应用1 引言在电机控制领域,TI公司推出2000系列电机控制DSP。
TMS320F2812属于最新高端产品,适合工业控制、机床控制等高精度应用。
目前2000系列芯片在电气传动中的应用以TMS320LF240x为主,应用TMS320F(C)28x的比较少。
但28x比24x系列的DSP具有更完备的外围控制接口和更丰富的电机控制外设电路,更高的主频,指令执行时间仅为6.67ns,流水线采样最高速率60ns,12位A/D转换通道16个,PWM输出通道12个。
资源足够同时控制两台三相电机,使控制系统价格大大降低而体积缩小、可靠性提高,可在高度集成的环境中实现高性能电机控制。
电机控制系统基本结构见图1,本文阐述基于TMS320F2812的DSP电机控制系统设计中的重点。
图1 电机控制系统结构原理图2 引导加载ROM引导加载是指器件复位时执行一段引导程序,一般用于从端口(异步串口、I/O口或HPI 主机接口)将EPROM/FLASH等非易失性存储器中加载程序到高速RAM 中。
2.1 TMS320 812的启动模式TMS320F2812提供了几种不同的启动模式,四个通用I/O引脚用于确定选择何种启动模式,如表1所示。
2.2 SCI SPI启动加载器通过SPI同步传输和SCI异步传输实现FLASHROM引导加载。
硬件电路见图2,JP15为SPI或SCI引导加载器选择,1—2时选择SPI,2—3时选择SCI;JP4是SPI数据传输路径的选择,位于1—2时,连接至外部扩展接口J6或串行ROM,位于2—3时连接至J5仿真数据传输接口。
图2 SCI SPI启动加载器3 A/D转换模块TMS320F2812电机控制芯片内部集成了16路12位A/D转换模块,模拟量信号采样输入范围是0~ 3.3V,16路A/D通道分为两组,AD0~AD7为一组,AD8~AD15为一组。
每组都有一个专门输入端。
中南大学dsp2812实验报告
把输入序列作位倒序是为了在整个运算最后的输出中得到的序列是自然顺序。首先,把原始输入的2N=1024个点的实数序列a(n)当成N=512点的复数序列d(n)。偶数地址是d(n)的实部,奇数地址是d(n)的虚部。然后,复数序列经过位倒序,存储在DATA数据处理缓冲器中。
在用VC55X进行位倒序组合时,使用位倒序寻址方式,AR0存放的整数N是FFT点数的一半,一个辅助寄存器指向一个数据存放的单元。当使用位倒序寻址把AR0加到辅助寄存器时,地址以位倒序的方式产生,进位是从左到右。
// Global variables used in this example:
Uint16 LoopCount;
Uint16 ConversionCount;
Uint16 Voltage1[1024];
Uint16 Voltage2[1024];
Uint16 Voltage3[1024];
main()
dataI[k]=dataI[k]-dataR[k+b]*sin_tab[p]+dataI[k+b]*cos_tab[p];
dataR[k+b]=TR-dataR[k+b]*cos_tab[p]-dataI[k+b]*sin_tab[p];
dataI[k+b]=TI+temp*sin_tab[p]-dataI[k+b]*cos_tab[p];
#include "DSP281x_Examples.h" // DSP281x Examples Include File
// Prototype statements for functions found within this file.
基于TMS320F2812直流电机数字调速系统
一 礤 鳓
基 于 T S 2 F 8 流 电机 数 字 调 速 系 统 M 3 0 2 1 2直
王 力 王 鹏 伟 ,
(. 西 省 西 安 市 第 3 研 究 所 , 西 西 安 7 0 6 ; . 天 恒 星 空 间 技 术 应 用 有 限 公 司 , 西 西 安 7 0 6 ) 1陕 9 陕 10 5 2 航 陕 10 5
摘 要 :文 中采 用 T 3 0 2 1 MS 2 F 8 2定 点 数 字 信 号 处 理 器作 为直 流 电机 调 速 系统 的 控 制 芯 片 , 高 了 系统 的控 制 精 度 并 提 简化 了控 制 系统 的硬 件 结 构 。 同 时采 用 抗 积 分 饱 和 P D 算 法 对 电机 的 转速 实施 双 闭环 控 制 , 用 C语 言 与 ; 编 语 言进 行 I 使 1 2 混合 编 程 , 而使 电 机调 速 系统 的 稳 定 性 和 动 态 性 得 到提 高 。 从
s e d c n r l y t m. TM S 2 F 8 2 i c e s s t e c n r l r cso n i l is t e h r wa ea c ie t r ft e c n r l p e o to s e s 3 0 2 1 n r a e h o t o e ii n a d smp i e h a d r r h t c u e o h o t o p f s se y t m. On t eo h r h n ,i a o t h n e r l D l o ih wi a u a i n c r e t n t c iv h o b e co e l o h t e a d t d p st e i tg a PI ag rt m t s t r t o r c i O a h e e t ed u l ls - p h o o o