悬挂运动控制系统 尹延辉
悬挂运动控制系统(E题)设计报告之欧阳引擎创编

悬挂运动控制系统(E题)设计报告欧阳引擎(2021.01.01)摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm ×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。
关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器一、设计要求1、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
2、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
3、发挥部分(1)能够显示物体中画笔所在位置的坐标;(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
悬挂运动控制系统设计

悬挂运动控制系统设计
张鑫;杨砚杭;党丽娜
【期刊名称】《电气传动自动化》
【年(卷),期】2007(029)004
【摘要】本设计主要采用单片机作为控制、运算单元和步进电机作为执行单元,使用逐点比较插补算法来实现对被控对象位置和轨迹的精确控制.
【总页数】3页(P24-26)
【作者】张鑫;杨砚杭;党丽娜
【作者单位】兰州交通大学,甘肃,兰州,730070;华北石油管理局,钻井二公司,河北,任丘,062552;天水电气传动研究所,甘肃,天水,741018
【正文语种】中文
【中图分类】TP368.1
【相关文献】
1.基于FPGA控制的悬挂运动控制系统设计 [J], 谭菊华;王东波;刘桥
2.TMS320F28027与L298N的悬挂运动控制系统设计 [J], 程章格;谷若雨;王海波;刘和平;邓力
3.基于MCS-51单片机的悬挂运动控制系统设计 [J], 张程;聂虹
4.悬挂运动控制系统设计 [J], 芮长城;温阳东;方龙
5.基于单片机的悬挂运动控制系统设计 [J], 李积英
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机的悬挂运动控制系统毕业设计(论文)

毕业设计论文基于单片机的悬挂运动控制系统毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
悬挂运动控制系统(E题)设计报告之欧阳道创编

悬挂运动控制系统(E题)设计报告摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。
关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器一、设计要求1、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
2、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
3、发挥部分(1)能够显示物体中画笔所在位置的坐标;(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
4、评分标准51、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定的时间,该项目不得分;3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试时自带。
悬挂运动控制系统(E题)设计报告之欧阳与创编

悬挂运动控制系统(E题)设计报告摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。
关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器一、设计要求1、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm 的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
2、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
3、发挥部分(1)能够显示物体中画笔所在位置的坐标;(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
4、评分标准51、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定的时间,该项目不得分;3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试时自带。
悬挂控制系统后
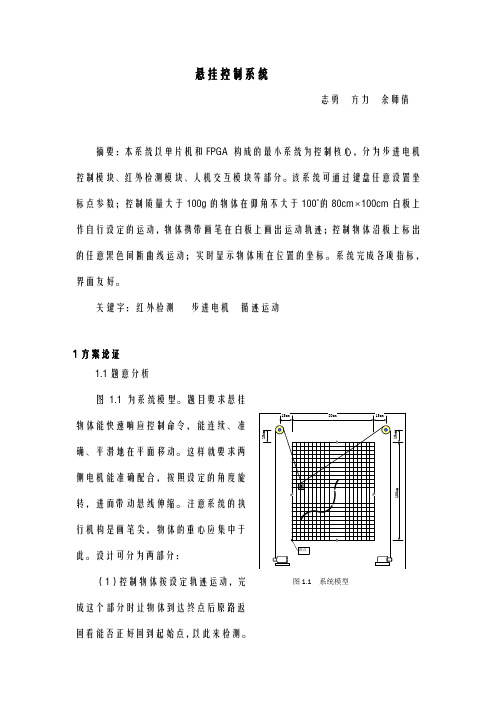
悬挂控制系统志勇方力余师倩摘要:本系统以单片机和FPGA 构成的最小系统为控制核心,分为步进电机控制模块、红外检测模块、人机交互模块等部分。
该系统可通过键盘任意设置坐标点参数;控制质量大于100g的物体在仰角不大于100°的80cm 100cm白板上作自行设定的运动,物体携带画笔在白板上画出运动轨迹;控制物体沿板上标出的任意黑色间断曲线运动;实时显示物体所在位置的坐标。
系统完成各项指标,界面友好。
关键字:红外检测步进电机循迹运动1方案论证1.1题意分析物体能快速响应控制命令,能连续、准确、平滑地在平面移动。
这样就要求两侧电机能准确配合,按照设定的角度旋转,进而带动悬线伸缩。
注意系统的执行机构是画笔尖,物体的重心应集中于此。
设计可分为两部分:(1)控制物体按设定轨迹运动,完成这个部分时让物体到达终点后原路返回看能否正好回到起始点,以此来检测。
画好直线后再去画圆。
(2)循迹运动,须在画笔上安装传感器阵列,以辨认黑色曲线走向,并将数据送控制核心处理,最后接收执行命令,沿曲线逐步前进。
画笔运动过程中,实际所达位置与预定位置之间的误差应控制在要求围,因此应采用应变系数小的吊绳,并且尽量使电机转盘同轴。
1.2方案比较与选择a)电机选择电机是整个悬挂控制系统的动力源,而题目并没有规定使用何种电机,所以在系统设计之初首先面临的一个问题便是选用什么电机。
方案一:使用直流电机。
直流电机输出功率大,带负载能力强,驱动电路简单,但精确控制直流电机转动角度不易实现。
方案二:使用步进电机,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
给电机加一个脉冲信号,电机就转过一个步距角,具有较强的快速启停能力。
其控制特性如图1.2所示。
θ= ck ,其中θ为步进电机的角位移量,k 为脉冲数,c 为常数。
这一线性关系的存在,使得步进电机只有周期性的误差而无累积误差,这一特性是整个系统方案的基础。
而在步进角方面,图1.2 步进电机控制特性我们选用的三相六拍式步进电机,步进转角最小可以达到1.5度,可以满足系统控制精度要求。
基于单片机的悬挂运动控制系统
课题:基于单片机的悬挂运动控制系统摘要:本控制系统主要以MCS-51单片机8031为控制核心,并对其程序存储器以及I/O接口进行扩展,程序存储器扩展采用一片27256,I/O口扩展使用8255,并在8255的接口上连接外部输入输出设备。
通过建立所需要的运动轨迹曲线的参数方程,建立运动控制模型,按照算法对两组驱动步进电机进行控制,实现了悬挂寻迹系统在给定范围内的定点运动、曲线运动以及圆心可任意设定的圆周运动功能。
通过键盘输入指令可在指定区域内完成所需的运动。
关键词:单片机智能算法运动控制模型步进电机第1页Abstract: The nuceus of this control systerm is the 8031 that the series of MSC-51.Expand the momory of programme and I/O interface. The momory of programme expanding use a 27256.The I/O interface Expanding use a piece 8255.In the interface of 8255 often connect with the other import or output device. Though establish the necessary parameter equation of movement locus and movement control model.For the control of the two direct current engine,it relize the hanging seek systerm’s movement in the sphere or curve movement or tht circumference movement that the coodinate could set up random.Through inout the programme.The systerm could accomplished the movement we need.Keywords: MSC-51 、 parameter equation 、direct current engine movement control model第2页第 3 页一:方案论证根据题目的设计要求,本设计主要实现寻迹系统设定和对设定轨迹的搜索功能,并能实时的显示寻迹系统所在位置的坐标。
基于单片机控制的悬挂运动系统
74LS04 74LS04
74LS04 74LS04
图4 脉冲调制的红外线发射-接收电路
系统的软件设计
(1)软件控制总图(如图5所示) (2)软件的主要的特点 采用了高精度的加、减、乘、除、开方等浮点运算,提 高了电动机的控制精度。 利用多个传感器对多个测量信号的测量可提高测量的精
运行给定曲线
坐标设定
总
显示坐标
控
任意曲线
制
键盘设定执行功能
模
任意图
块
语音播报坐标
任意一点到另一点
图5 软件控制模块总图
开始 各种初始化 坐标设定 任意曲线
任意圆 任意一点到另一点
走给定曲线 结束
图6 主程序流程
度,使悬挂物体在给定的路径上准确无 误地运行。
提供了完善的键盘控制功能,利用 键盘可实现题目要求的各种功能;还可 自动调整悬挂物体的坐标。
控 制 原 理
悬挂运动控制系统如图1所示,本系统利用一套单片机 系统控制两台步进电动机动作,两台电动机控制系统采用相 同的工作原理,都是利用 PWM 脉冲调制波来控制步进电动 机的转向及转速,从而达到控制绘图笔位置的目的。
≈
≈
≈
≈
原点
物体的运动轨迹则是一条光滑的曲线。电动机的控制可通过 求两点间物体到本电动机系统定滑轮之间的相对绳长来控制, 如图2所示。单片机在已知两点坐标的前提下,通过加、减、 乘、除、开方等各种浮点运算计算出相对绳长ΔL,然后根据 绳长求出电动机转动的方向及步进值,最后向步进电动机发 出控制信号控制物体的运动轨迹。
L 2
y 2
y
1
L
1
x 2
x 1 图2 绳长计算示意图
L1= x12+y12
悬挂运动控制系统的设计与实现
悬挂运动控制系统的设计与实现张鹏;何金保;诸葛霞【摘要】设计了一种的悬挂运动控制系统,该系统包括反射式红外线探测器、电机驱动控制电路、键盘输入等主要部件.由于物块位置的移动依赖于电机控制吊绳长度的伸缩,所以该控制系统需要单片机完成复杂的数学计算从而提高运算精度.%In this paper,a suspension motion control system is designed.The system circuits were designed,including the infrared photoelectric sensors,motor drive circuit control,keboard and LCD as well.The precise movement of the object is dramatically determined by the length of the suspension line whose elongation and shortening are well controlled by the two motors,it is of great importance to use 89C52 to complete considerable math calculation in order to increase the operation precision.【期刊名称】《微型电脑应用》【年(卷),期】2018(034)001【总页数】4页(P12-14,21)【关键词】悬挂运动;控制系统;外线探测器【作者】张鹏;何金保;诸葛霞【作者单位】宁波工程学院电信学院,宁波315211;宁波工程学院电信学院,宁波315211;宁波工程学院电信学院,宁波315211【正文语种】中文【中图分类】TG4090 引言目前,随着科技的不断发展,运动控制技术已成为先进制造技术的关键技术,制造业采用机器换人的方式来实现工厂的运作,包括汽车的制造、食品的包装等无不采用自动化设备来完成机械的精准运动[1-4]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
---------------------------------------------------------------------------------------------------------------------- 试题编号:E题目:悬挂运动控制系统学校:哈尔滨工程大学姓名:尹延辉姓名:于航姓名:王船宝摘要和关键词【摘要】:本系统主要由AT89S52作为主控芯片,来实现全部的数学计算和程序储存,并且通过并口来控制电机运动达到在图板上画图的目的,步进电机采用L297作为控制芯片,L298作为功率驱动电路。
执行机构采用步进电机做动力,采用步进电机可以省去闭环控制中的位置传感器,而且运动精度有大大的提高,我们采用的步进电机的步进角只有1.8°对于本系统精度已足够用了,另外我们的设计还有许多特点,都可以将误差控制在一定的范围内,最后再进行修正即可。
【关键词】:AT89S52 L297 L298 步距角闭环控制步进电机Abstract and Key Words【Abstract】:This system mainly makes the AT89S52 as the lord to control the chip, carry out all mathematics calculations and the procedure storage, and pass to combine to control the electrical engineering sport to attain the purpose that draws on the drawing board, treading into the electrical engineering to adopt the L297 conduct and actions control chip, the L298 is the power to drive the electric circuit.Carry out the organization adoption treads into the electrical engineering to do the motive, adopt to tread into the electrical engineering and can shut the wreath control is with the province of position spreads the feeling machine, and exercise the accuracy contain huge exaltation, what we adopt tread into the electrical engineering to tread into the Cape to only have 1.8 °s to have already used enough to this system accuracy, another our design still have many characteristicses, can control error margin within the scope of certain, the end carry on again to revise.【Key Words】:AT89S52 L297 L298 Step Angle Closed loop control Step Motor目录第一章设计任务与技术指标----------------------------------------------------------------61.1设计任务--------------------------------------------------------------------------------61.2技术指标--------------------------------------------------------------------------------71.3题目简评--------------------------------------------------------------------------------7 第二章方案论证与比较---------------------------------------------------------------------- 82.1闭环控制系统------------------------------------------------------------------------- 82.2开环控制系统--------------------------------------------------- ----------------------9第三章系统硬件设计------------------------------------------------------------------------103.1系统的总体组成---------------------------------------------------------------------103.2步进电机的驱动电路---------------------------------------------------------------103.3步进电机控制------------------------------------------------------------------------103.4相位顺序的产生------------------------------------------------ ---------------------133.5负载电流的调节------------------------------------------------ ---------------------143.6相位斩波和禁止斩波---------------------------------------------------------------153.7步进电机驱动芯片L398-----------------------------------------------------------15-3.8步进电机的基本原理---------------------------------------------------------------163.9步进电机的基本参数--------------------------------------------------------------17 第四章系统软件设计------------------------------------------------------------------------204.1程序流程图---------------------------------------------------------------------------204.2程序清单------------------------------------------------------------------------------20 第五章系统的组装---------------------------------------------------------------------------215.1整机结构图及工艺说明------------------------------------------------------------21 第六章系统调试------------------------------------------------------------------------------226.1电路的调试方案---------------------------------------------------------------------226.2测试结果------------------------------------------------------------------------------226.3测试结论------------------------------------------------------------------------------23 参考文献----------------------------------------------------------------------------------------24 致谢----------------------------------------------------------------------------------------------25 附录一-------------------------------------------------------------------------------------------26附录二-------------------------------------------------------------------------------------------29 附录三-------------------------------------------------------------------------------------------30第一章设计任务与技术指标1.1 设计任务:设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如图1所示。
图1 电机控制原理示意图1.2 技术指标:1.2.1基本要求:●控制系统能够通过键盘或其他方式任意设定坐标点参数;●控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;●控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;●物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。