激光多普勒测速..
visar测速原理
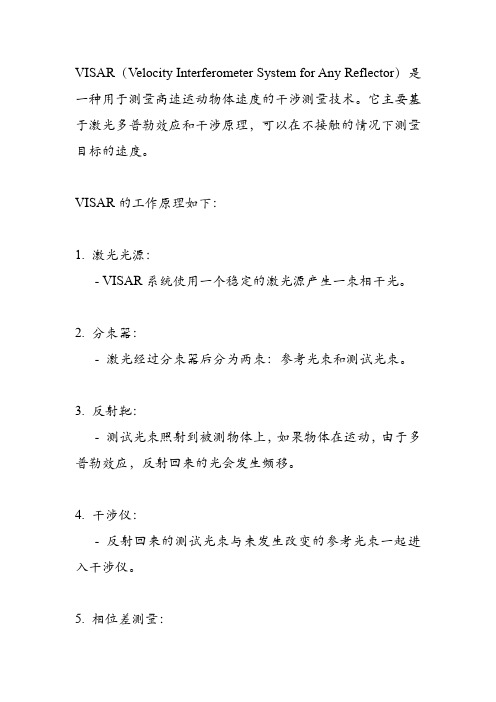
VISAR(Velocity Interferometer System for Any Reflector)是一种用于测量高速运动物体速度的干涉测量技术。
它主要基于激光多普勒效应和干涉原理,可以在不接触的情况下测量目标的速度。
VISAR的工作原理如下:
1. 激光光源:
- VISAR系统使用一个稳定的激光源产生一束相干光。
2. 分束器:
- 激光经过分束器后分为两束:参考光束和测试光束。
3. 反射靶:
- 测试光束照射到被测物体上,如果物体在运动,由于多普勒效应,反射回来的光会发生频移。
4. 干涉仪:
- 反射回来的测试光束与未发生改变的参考光束一起进入干涉仪。
5. 相位差测量:
- 在干涉仪中,这两束光波相互干涉,形成干涉图案。
通过检测干涉图案的变化,可以计算出测试光束与参考光束之间的相位差。
6. 速度计算:
- 由于相位差与物体的速度直接相关,因此可以根据相位差计算出物体的速度。
通常情况下,这个速度可以达到几千米每秒或更高。
7. 数据记录与分析:
- 计算机收集并处理这些速度数据,然后将结果以图形或数值的形式呈现出来。
VISAR技术广泛应用于物理学、材料科学、地球科学等领域,例如用于研究冲击波的传播、测量爆炸物的爆炸速度、研究超高速碰撞等现象。
由于其非接触式测量的优点,使得它可以测量高温高压环境下的高速运动物体,而不会对实验造成干扰。
激光多普勒测速技术原理及其应用

激光多普勒测速技术原理及其应用作者:陈益萍来源:《电子世界》2013年第07期【摘要】激光多普勒测速仪(简称LDV)以其测速精度高、测速范围广、空间分辨率高、动态响应快、非接触测量等优点正快速地发展成为众多领域中一种最常见的测定工具。
本文首先详细介绍了激光多普勒测速技术的基本原理,然后总结了激光多普勒测速技术在各个领域的应用,最后探讨了未来激光多普勒测速技术的发展方向。
【关键词】激光多普勒测速;频移;外差检测1.引言多普勒效应是19世纪奥地利物理科学家多普勒.克里斯琴.约翰(Doppler,Christian Johann)发现的声学效应。
在声源和接收器之间发生相对运动时,接收器收到的声音频率不会等于声源发出的原频率,于是称这一频率差为多普勒频差或频移。
1905年,爱因斯坦在狭义相对论中指出,光波也具有类似的多普勒效应。
只要物体产生散射光,就可利用多普勒效应测量其运动速度。
所谓光学多普勒效应就是:当光源与光接收器之间发生相对运动时,发射光波与接收光波之间会产生频率偏移,其大小与光源和光接收器之间的相对速度有关。
二十世纪六十年代,激光器得以发明。
激光的出现大力地促进了各个学科的发展。
由于激光具有优异的相干性、良好的方向性等特点,因此在精密计量,远距离测量等方面获得了广泛的应用。
伴随着激光在光学领域的应用,一门崭新的技术诞生了,这就是多普勒频移测量技术。
1964年,杨(Yeh)和古明斯(Cummins)[1]首次证实了可利用激光多普勒频移技术来测量确定流体的速度,激光多普勒测速仪(LDV)以其测速精度高、测速范围广、空间分辨率高、动态响应快、非接触测量等优点在航空、航天、机械、生物学、医学、燃烧学以及工业生产等领域得到了广泛应用和快速发展[2-3]。
激光多普勒测速仪是利用运动微粒散射光的多普勒频移来获得速度信息的。
2.激光多普勒效应3.光外差在激光测速仪中有三种常见的外差检测光路基本模式,它们是参考光模式、单光束-双散射模式和双光束-双散射模式。
激光多普勒测速仪(LDV)相位多普勒粒子分析仪(PDPA)

全息摄影与普通摄影的区别
类别
记录方式
全息摄影
物束光与参考光束
记录内容
成像介质
影像观察 方式
色彩表现 影像特点
物体散射光的强度及相位 信息
记录后称全息片 (全灰色调) 一般借助激光还原观看
彩色干涉条纹图像 三度空间立体感的景物, 只有散射光线而并无实物
一般摄影
光学镜头成像 (物束光) 景物本身或 反射光强度 感光胶片
眼睛直接观看
彩色物体图像 平面物体图像
激光全息摄影包括两步:
◇ 记录 ◇ 再现
全息记录过程
把激光束分成两束;一
束激光直接投射在感光 底片上,称为参考光束; 另一束激光投射在物体 上,经物体反射或者透 射,就携带有物体的有 关信息,称为物光束.物 光束经过处理也投射在 感光底片的同一区域上. 在感光底片上,物光束 与参考光束发生相干叠 加,形成干涉条纹,这 就完成了一张全息图。
预先标定粒 径与信号可 见度或幅值 的关系
LDV信号测粒径只能用于一些
简单、粒子浓度很低的流动
Doppler信号中的最大、最小和基底值
1.3 激光多普勒测速仪的外差检测模式
•参考光束系统:参考光直接照 射到光检测器去同散射光束进 行光学外差。
可用光阑受到严格限制,光路安
பைடு நூலகம்
排、接收光阑、粒子浓度与可达
md (m 1) 4
2sin( / 2) d R
2.2 相位多普勒测粒要点
• PD法的测量原理与光散射干涉法密切相关,即以波长作 为测量标尺。
• PDPA中两入射光束的交角较小(约5°),同时测量容积 保持较少的条纹数(5-8条),但PDPA的接收光学至少基 于2个(通常3个,可解决相位模糊问题)光电检测器。
激光相位多普勒技术

激光相位多普勒技术
激光相位多普勒技术是一种用于测量目标速度的高精度光学测量方法。
它基于多普勒效应和激光干涉原理,常用于测速、运动检测和遥感等领域。
以下是关于激光相位多普勒技术的一些基本原理和应用:
基本原理:
多普勒效应:
多普勒效应是指当光源和观测者相对运动时,光的频率发生变化。
对于激光相位多普勒技术,激光被用来照射目标,目标反射的光发生多普勒频移,该频移与目标速度成正比。
相位测量:
利用激光干涉原理,测量目标反射光的相位差。
相位差与多普勒频移相关,通过测量这个相位差可以确定目标的速度。
激光干涉:
激光被分成两束,一束直接照射到目标,另一束经过光程延迟器后照射到目标。
两束光在目标处发生干涉,产生干涉图样。
目标的运动导致了相位差的变化,通过测量这个相位差可以计算目标的速度。
高精度测量:
激光相位多普勒技术具有高精度和高分辨率的优点,适用于需要非常精确速度测量的应用,如气象雷达、交通监控、激光雷达等领域。
应用领域:
气象雷达:
用于测量大气中的风速。
激光相位多普勒技术可以提供对风场的高分辨率测量,用于气象研究和天气预测。
交通监控:
用于测量车辆的速度,可应用于交通管理、高速公路监控等领域。
激光雷达:
在激光雷达中,激光相位多普勒技术可用于测量目标的速度,常用于军事、安防和导航系统中。
医学影像:
在医学成像中,激光相位多普勒技术可用于测量血流速度,常应用于超声血流仪等设备。
总体而言,激光相位多普勒技术在需要高精度速度测量的各种应用中发挥着重要作用,提供了一种非常灵敏和精准的测量手段。
激光多普勒测速仪的原理及在冷连轧中的应用
合 ( P L — T C M )工艺 。主轧 机 为5 架6 辊uc M轧机 ,配 有一 套
一
、
激光 多普 勒测速仪 的原 理及构 造
激 光 多普 勒测 速 系统 。 该测 速 系统 包 含4 套 激 光测 量 头 ( 分 别 位 于2 、3 、4 机 架之 前 ,5 机 架 之 后 ),4 套I / 0模 块 ( 信 号处 理 电器 柜 内 ),1 套 水冷 设 备 (1 个 水 冷柜 ,3 个 阀 台 ),4 套报警 指示 灯. 多 普 勒 测 速 系 统 在 运 行 过 程 巾 ,激 光 测 量 头 会 产 生
光发 射 来后 ,照 射在 了钢带 L @ L 化液 的表 面而 不是 钢带 表 面 ,这样 测量 到 的速度 就会 有误差 且 不稳定 ,为 解决 这一 问 题 ,我们 在激 光 照射 的正下 方 区域 弓 1 人两 路 2 ~ 3 Mp a 的压 缩 空 气 吹 扫 ,这样 钢 带 表 面 的乳 化 液 就 会 被 缩 卒气 吹扫 吹 走 ,使 激光 能照 射到 钢带表 面 ,保证 测速仪 所测 量 到的有 效
分布 。
大量 的热 ,如 果测 量 头 温 度 太 高 ,会 影 响测 量 精 度 ,所 以
K A N O MA X 公司设计引入一套带有冷凝泵的水冷系统 ,使用
工业 电解水循 环制冷 ,让测 量头在 适宜 的温度下 作 。
在 轧制 过 程 中 , 由于钢 带 表 面 存 在 残 留乳 化 液 ,当激
.
三 、结束语
. .
=
一
本文 以首钢 京唐 冷 轧厂 为实例 ,主要 介绍 了激光 多普
勒测 速仪 的原 理及 在冷 连轧 中的应 用 ,这是 以物理 学 中光 的
激光多普勒测速(LDV)与粒子成像测速(PIV)的应用
图像采集和 速度场计算
由一台基于微机的控制器完成
通过改变PI V 系统的延迟时间, 得到不同喷雾时刻的速度矢量图。
实例4:柴油机燃油喷射雾化的PIV 测量试验研究
PIV 通过CCD 和采集卡, 获得粒子图像.
在喷雾液滴的两相流场内, 由于粒 子像太多, 不能用跟踪单个粒子轨 道的方法( PTV) 来获得速度信息.
3.LDV与PIV测量原理
激光多普勒测速原理
微粒接受到的光波频率与光源频率会
有差异,差异大小同微粒运动速度的
单一频率的激光照射 大小和照射光与微粒速度方向之间的
运动微粒
夹角有关。
微粒以一定速度穿过时
接收散射光的多普 频移获得微粒速度
若微粒速度与流体团速度 一致,则可以获得该点的 流场速度。其关系如下:
Satoru Sasak i等运用自相关PIV 技术, 从曝光图像中得到了喷雾 周围的空气流动速度。研究结果显示, 喷射开始后喷油嘴周围的空 气被喷雾前端向外挤压, 随后流速向相反方向进行。 M iyazak i等将PIV 技术成功应用到水平管内螺旋气固两相流粒子 运动, 实验中包括用粒子群获得的高密度图象模型来得到速度, 对单 个粒子的追踪来得到低密度粒子数。
激光多普勒测速(LDV)与粒子 成像测速(PIV)在柴油机流场
特性方面的应用
报告主要内容
1. 意义与背景 2. 国内外研究现状 3. LDV与PIV测量原理 4. 实例应用介绍 5. LDV与PIV测试方法对比 6. 适用范围 7. 影响测试精度因素与测量误差分析 8. LDV与PIV局限性 9. LDV与PIV展望 10.参考文献
激光多普勒测速技术应用于浓缩燃烧器湍流流场的测量:在煤粉 浓缩燃烧器中加入示踪颗粒,利用激光多普勒测速技术对湍流流场 的速度场及湍流参数进行测量研究,通过自动数据采集及处理分析 系统,获得不同钝体结构的煤粉浓缩燃烧器的速度及湍流强度分布。
克拉美罗推导
• 参考文献:激光多普勒测速参数估计的 Cramer—Rao下限,《中国激光》,王纪强 张春 熹 等,北京航空航天大学。
•
激光多普勒测速仪(Laser Doppler Velocimeter, LDV),其原理是建立在光学多普勒效应和差频检 测基础上,它可以用来测量液体、气体的流动速 度或固体目标的运动速度。
信号模型
• 回波信号经过等间隔均匀采样,其离散信号序列x(n)由 N个实样本组成。
• 其中,s(n)为目标回波信号,w(n)为零均值高斯白噪声 0 为多普勒回波信号的初始相位, 序列,方差为 2 , 为采样时间间隔, D 和 rD 分别为多普勒频率(频移)和多 普勒频率变化率,分别与运动目标的速度和加速度呈线性 关系。
• 令 为参数矢量
• 对于给定的 表示为
,观测信号的概率密函数(PDF)可
• 需计算Fisher信息矩阵J,即
• 求得Fisher信息矩阵J
• 其中,
• 根据克拉美罗下界
• 求J的逆矩阵,得到当N较大时,多普勒频移ω的估计方 差下限为
多普勒频率变化率r的估计方差下限为
激光多普勒测速讲解
t ccw
L 1 2 c c
r dl
图6-37 环形干涉仪的Sagnac 效应
二者之差为
t 2 r dl 2 2 c t 2 1 c S r dl 2
4S 2 4S r d l r d l L tc c2 c2 c
12
光纤陀螺
光纤陀螺也是基于Sagnac效应。以长度为的光纤绕成直径为的由个 圆圈组成的光纤圈,其直径和圆面积可以分别表示为:
L D N
L2 S 4 4N 2
D 2
光程差则可以表示为
L
4SN LD c c
提高测角精度的方法:加大直径、增加圈数。 实用的环形激光测角采用光纤陀螺仪。
光 的频率
νs
4
差频法测速
可分为两类: 参考光束型多普勒测速:检测散射光和入射光之间的频移 (多普勒频移); 双散射光束型多普勒测速:检测两束散射光之间的频差 (多普勒频差)。
5
参考光束型多普勒测速
图6-32所示为参考光束型测速方法的光路的原理图
设 Ei (t ) 和 ES (t ) 分别表示参考光和散射光的电矢量的瞬时值 则
3
静止接收器上接收到的运动微粒散射光 的频率
如图6-31所示,因此在S处接收到的散射光的频率应为 υ es υ ei υ es νs νQ (1 ) νi (1 )(1 ) c c c υ νi (es ei )νi c 常采用差频法测量多普勒频移。 即将入射光与散射光混频,两 束光“混频”产生的拍频信号的 频率就是多普勒频移。 图6-31 S处接收到的微粒Q散射
激光多普勒测速技术进展
c a e p lrv lc mee s a e d s u s d i e al B sd s t a ,h s p p r gv s a c mp e e sv n r d c in o y l s rDo p e eo i tr , r ic s e n d t i e i e h t t i a e ie o r h n ie ito u t f . o HH y e d a ・ e u n y ls r D p lrv lc me e i h i d v lp d b sn h a Unv ri e e t n r a e te t p u f q e c a e o pe e o i trwh c e eo e y T i g u ie st r c nl t i c e s h lr s y yo me u a l a g in f a t . h e eo me tte d o s rDo p e e o i a u e n e h i u s i s i— s a r b e r n e sg i c nl T e d v lp n r n fl e p l rv lc t me r me ttc n q e s a o d s i y a y s l
Ab t a t T i a e ie e iw o e lts d a c si a e p lrv lc t a u e n e h i u s A r f sr c : h sp p rg v s a r ve f h ae t v n e n ls rDo p e eo i me s r me t c n q e . b i t a y t e
1 引 言
・
综述 与评论 ・
Hale Waihona Puke 激 光 多普 勒 测 速技 术 进 展
使用多普勒激光测速仪进行流体动力学实验的方法
使用多普勒激光测速仪进行流体动力学实验的方法流体动力学是研究流体在运动中的力学特性的学科,它在各种工程领域中起着重要的作用。
为了深入了解流体的流动特性,科学家们经常需要进行实验研究。
而多普勒激光测速仪是一种常用的实验仪器,可以帮助我们获取流体动力学实验中的数据,并从中分析流体的速度和流动模式。
多普勒激光测速仪是一种基于多普勒效应的测速仪器,使用激光束照射流体中的颗粒,并通过测量激光束的频率变化来计算流体的速度。
这种测速仪的原理较为复杂,但操作起来相对简单。
下面将介绍使用多普勒激光测速仪进行流体动力学实验的方法。
首先,需要准备一个实验装置。
这个装置通常包括一个容器,用于储存流体,以及一些流体注入和排出的设备,可以控制流体的流动。
此外,还需要安装一个多普勒激光测速仪,它通常由一个激光发射器、一个光学透镜和一个接收器组成。
接下来,将实验装置放置在一个稳定的平台上,并准备好要进行实验的流体。
可以选择不同种类的液体或气体作为实验对象,根据不同的需要选取合适的流体。
然后,将多普勒激光测速仪安装在合适的位置上。
通常,激光发射器和接收器的位置需要精确调整,以确保激光束可以准确地照射到流体中的颗粒,并能够接收到反射回来的光信号。
在进行实验之前,还需进行一些校准工作,以确保多普勒激光测速仪的精确度和准确性。
这个过程通常需要使用一些已知速度的标准物体进行校准,比如旋转的圆盘或移动的纸片。
通过与标准物体的比较,可以检验多普勒激光测速仪的测速精度。
校准完成后,就可以开始进行实验了。
首先,打开多普勒激光测速仪的电源,并调整一些设置参数,比如激光的功率和扫描速度。
然后,将流体注入实验容器中,并启动流体的流动。
注意,流体的流速和流量需要根据实验的需求进行调整。
同时,使用多普勒激光测速仪照射流体中的颗粒,并记录下反射回来的光信号。
根据光信号的频率变化,可以计算出颗粒的速度和流体的速度。
这些数据可以用来研究流体的流动模式和速度分布。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.激光多普勒测速的光路模式
图中所示是参考光模式,激光经分光镜分成两束光,其中一束是弱 光用作参考光,另一束是强光用作照射光束, 它们聚焦到测量区。光电 检测器接受参考光, 同时接受另一束照射光束经过粒子散射在同一方向 上的散射光,它们在光电检测器件中进行光外差,从而得到多普勒频移。 为了使参考光和散射光强度基本相近,必须使参考光减弱。通常参考光 束和照射光束的光强比为1:9左右,这里可以用中性滤光片来减弱参考 光,或者选择合适的分光镜的分光比来实现。
f D f S fo fo 1
u (es e0 ) c
4/23
u (es eo )
当入射光、散射光和速度方向布置成如图所示的那样,就可以 得到简单的多普勒平移表达式:
fD
2 sin / 2
uy
图2 多普勒测速特殊布置 图中θ为入射光方向与接收光方向的夹角,粒子的速度投影到该夹 5/23 角一半的垂直线方向上即得到 u y 。
图1 运动粒子的散射光
3/23
根据相对论,运动微粒P接收到的光波频率fP与光源频率fo之间的关系为
f P f o (1
u e0 ) c
静止的光检测器接收到粒子散射光的频率fS为
f S f P (1
u es ) c
光检测器接收到的光波频率与入射光波频率之差称为多普勒频移,用 fD表示,则
特点:双光束一双散射模式是目前应用最广泛的光路模式。它的多普勒 频移只取决于两束入射光方向,而与散射光方向无关,这是该模式的重 要特点。因为光接收器可以放在任意位置,而且可以采用大的收集立体 角以提高散射光功率。入射光系统可制成集成化光学单元, 大大提高了 9/23 光学系统的稳固性和易调准性。
3.激光多普勒测速的信号处理
特点:单光束一双散射模式一般用得较少,它没有明显的优点,可以用它 来接收两个互相垂直平面的两对散射光, 同时测量两个速度分量,而旋转 8/23 双孔光阑到任意角度, 可接收测量平面上任意方向的两个速度分量。
如图所示是双光束一双散射模式,激光经分光镜分成两束强度 相等、互相平行的光束,通过聚焦透镜,会聚于被测点,然后这两 束入射光在同一方向的散射光汇聚到光电检测器中进行外差而获得 多普勒频移。
如图所示是激光多普勒测速系统图,光学系统测量运动物体, 产生多普勒频移信号,光电检测器完成信号的收集及光电转换。但 是,实际上接收到的多普勒信号很小且存在噪声,所以信号要进行 放大和滤波等处理。根据多普勒信号的特点, 己研制出多种信号处 理系统,如:频谱分析仪、频率跟踪器、计数型处理机、F—P扫描 干涉仪、滤波器组、光子计数相关法、快速傅里叶变换。
光外差
光波的频率:5×1014 Hz 多普勒频移:108~109 Hz
直接检测散射光的光频,这种方法的典型分辨率为5MHz, 对于大多数的低速测量,将超出光电检测器的响应频率。
ห้องสมุดไป่ตู้
当来自同一个相干光源的两束光波按一定条件投射到光电 检测器表面时,通过光电转换的平方律效应可得到它们之间的 频差。这个频差就是所需要的多普勒频移,其它与光频接近或 更高频率信息都因远远超过光电检测器的频率响应被滤去。这 就是光外差,或称为光混频。利用光电检测器来收集散射光, 就能把光学多普勒频移变为电流的变化,然后采用各种电路对 信号进行处理,就能取得速度信息。
图7 频率跟踪原理图
11/23
光电检测器与光电效应
图8 完整的光电检测电路
图9 光电检测器模块结构框图
12/23
半导体材料的价带与导带间有一个带隙,其能量间隔为Eg。一般 情况下,价带中的电子不会自发地跃迁到导带,所以半导体材料的导电 性远不如导体。但如果通过某种方式给价带中的电子提供能量,就可以 将其激发到导带中,形成载流子,增加导电性。光照就是一种激励方式。 当入射光的能量hѵ≥Eg (Eg为带隙间隔)时,价带中的电子就会吸收光 子的能量,跃迁到导带,而在价带中留下一个空穴,形成一对可以导电的 电子——空穴对。这里的电子并未逸出形成光电子,但显然存在着由于 光照而产生的电效应。因此,这种光电效应就是一种内光电效应。
r ----费米能级
图10 不同材料能带分布图
13/23
4.激光多普勒测速的技术应用
激光多普勒测速具有许多优点,它广泛地应用于空气动力学和流体力 学,用来测量风洞、水筒、水工模型、射流元件等各场合中流体的流场分 布和有关的物理参量,它也适用于边界层流体的测量和二相流的测量。近 来, 已能测量亚音速、超音速喷气流的速度,所以被用来研究喷气过程、 燃烧过程,为燃气轮机、气缸、锅炉、原子能反应堆等方面的设计研究提 供了实验数据和测试结果。
图6 测量系统框架图
10/23
频率跟踪是目前性能较优,在国内外使用最广泛的信号处理机, 其最大优点是可用于信噪比较低的场合, 同时可以得到实时速度信 息。频率跟踪法是应用一个闭环负反馈信号跟踪系统实现信号的连续 实时测量,其原理如图6所示。多普勒信号首先经过滤波、放大电路 后,滤掉低频信号,获得信噪比较高的纯净的多普勒信号,然后输入 到频率跟踪电路, 由其中的压控振荡器输出瑞引出方波频率信号, 由高线性F/V转换电路转换为线性模拟电压,再由A/D转换。
激光多普勒测速技术
姓名: 学号: 学院:能源与动力工程 专业:工程热物理
1/23
主要内容
1.激光多普勒测速的基本原理
2.激光多普勒测速的光路模式 3.激光多普勒测速的信号处理 4.激光多普勒测速的技术应用
5.扩展光束型多普勒测量系统
2/23
1.激光多普勒测速的基本原理
光学多普勒效应就是:当光源与光接收器之间存在相对运动时, 发射光波与接收光波之间会产生频率偏移,其大小与光源和光接收 器之间的相对速度有关。 运动粒子P以速度u 通过测量区域时,粒子相对于入射光来说是 运动的,即光源静止,接收器运动;而相对于光电探测器来说,运 动粒子的散射光相对于探测器是运动的,即光源运动,接收器静止。
特点:参考光模式的光学单元具有结构紧凑、调节方便和使用灵活的优点。
7/23
图中所示是单光束一双散射模式, 一束人射激光束直接聚焦于测量点 上,该入射光束在两个不同方向上散射,两束散射光进行光外差而得到多 普勒频移。如图3所示,两支对称的散射光束通过置于大透镜前的双孔光阑, 其余的散射光则被遮挡住,然后,两支散射光被光束分离器结合成单光束, 然后在光电检测器中进行光外差。