倒立摆拉格朗日建模方法(一)
1 球杆系统建模分析
《线性系统理论》课程设计报告书课题名称球杆系统姓名孟禹漆铖刘泽文孟凡强杨佐龙日期2013年2 月25日老师陈玮1 球杆系统建模分析本章将对球杆系统进行简单的介绍,然后采用拉格朗日方程建立其数学模型,并在此基础上分析其特性。
1.1球杆系统介绍球杆系统(Ball & Beam )是由球杆执行系统、控制器和直流电源等部分组成。
该系统对控制系统设计来说是一种理想的实验模型。
正是由于系统的结构相对简单,因此比较容易理解该模型的控制过程。
球杆执行系统(如图1 所示)由一根V 型轨道和一个不锈钢球组成。
V 型槽轨道一侧为不锈钢杆,另一侧为直线位移电阻器。
当球在轨道上滚动时,通过测量不锈钢杆上输出电压可测得球在轨道上的位置。
V 型槽轨道的一端固定,而另一端则由直流电机(DC motor )的经过两级齿轮减速,再通过固定在大齿轮上的连杆带动进行上下往复运动。
V 型槽轨道与水平线的夹角可通过测量大齿轮转动角度和简单的几何计算获得。
这样,通过设计一个反馈控制系统调节直流电机的转动,就可以控制小球在轨道上的位置。
图1 球杆系统执行机构原理图1.2拉格朗日方程介绍建立一个力学体系的动力学方程所需要的独立坐标称为广义坐标,广义坐标一旦确定,体系在空间的位置状态也就可以唯一确定。
广义坐标可以是坐标变量,也可能是是角动量或其他独立变量,凡能用来表述体系的位形、运动和动力学状态的独立参量都可作为广义坐标。
广义坐标的条件是:互相独立、满足约束方程、唯一确定体系的位形式动力学状态。
拉格朗日方程方法建模可以表述为:设一个机械系统的自由度为n ,对于系统可以采用广义坐标12(,,...,)n q q q q =,12(,,...)n q q q q =来描述,记该系统的总体动能为(,)T q q ,总体势能为()V q ,系统的运动特性可以用以下的拉格朗日方程描述:d 1,2,...,d i i iL Li n t q q τ⎛⎫∂∂-== ⎪∂∂⎝⎭ (1.1)其中,方程组中方程式的数目等于质点系的自由度数,i τ为作用在第i 个广义坐标i q 方向的外部力或力矩之和。
倒立摆的动力学模型
倒立摆的动力学模型倒立摆是一个经典的物理实验,同时也是控制系统领域中的一个重要研究对象。
本文将介绍倒立摆的动力学模型以及相关的理论背景。
一、背景介绍倒立摆是由一个杆和一个连接在其上方的质点组成的,它在重力作用下呈现出不稳定的平衡状态。
倒立摆的动力学模型可以通过建立质点与杆之间的力学关系来描述。
二、质点的动力学方程假设质点质量为m,位置用x表示,杆的最低点为平衡位置,根据牛顿第二定律,可以得到质点的动力学方程:m * d^2x / dt^2 = Fg + Fc其中Fg表示质点受到的重力,Fc表示质点受到的摩擦力。
重力可以表示为:Fg = -mg * sinx摩擦力一般可以近似为:Fc = -b * dx / dt其中b为摩擦系数。
将上述方程带入质点的动力学方程中,可以得到:m * d^2x / dt^2 + b * dx / dt + mg * sinx = 0这就是质点的动力学方程。
三、杆的动力学方程杆的运动可以由转动惯量和力矩平衡来描述。
假设杆的质量为M,长度为l,转动惯量为I,杆绕其一端的转动中心转动,可以得到杆的动力学方程:I * d^2θ / dt^2 = -Mgl * sinθ其中θ表示杆的角度。
四、控制方法倒立摆的控制方法可以分为开环和闭环控制。
开环控制是通过输入外部力或力矩来控制摆的位置或角度,而闭环控制是通过测量摆的位置或角度,并根据目标位置或角度来调整输入力或力矩。
闭环控制往往使用PID控制器。
PID控制器是一种经典的控制器,可以根据目标位置与当前位置之间的差异来调整输入力或力矩,从而实现对倒立摆的控制。
五、应用领域倒立摆的研究在控制系统领域具有广泛的应用。
例如,在工业自动化中,倒立摆可以用来模拟和控制各种平衡问题。
此外,倒立摆还可以用于教育和科普领域,帮助人们更好地理解动力学和控制原理。
六、结论倒立摆的动力学模型是控制系统领域中一个重要的研究对象。
通过建立质点与杆之间的力学关系,可以得到质点和杆的动力学方程。
02-课件:5-6 拉格朗日法动力学建模(四连杆机械臂)

动力学方程的推导
求拉格朗日函数:
L Kt P
1 2
ni i i1 j 1 k 1
TraceqTi iI
i
TiT qk
q j qk
1 2
n I ai qi2
i 1
n
mi gT Ti i ri ,
i 1
n 1,2
动力学方程的推导
求动力学方程,先求导数:
L
q p
1 2
n i1
k
i 1
Trac
p rp
注意:上述惯量项与 重力项在机械手的控 制中特别重要,它们 将直接影响到机械手 系统的稳定性和定位 精度。只有当机械手 高速运动时,向心力 和哥氏力才变得重要。
3rp
link3
3 rpT
dm)
T3 qk
T
jk
动能和位能的计算
任何机械手上任一连杆i动能为:
Ki
dKi
link i
1
Trace
i
i
2
j 1 k 1
Ti q j
I i qTi k qq j
k
具有n个连杆的机械手总的动能为 :
K
n
Ki
i1
1
n
n
Trace
i
2 i1
j 1 k1
dKi
1
Trace
i
i
2
j 1 k1
Ti q j
j r ir T
TiT q k
qqdm j k
1
Trace
i
i
2
j 1 k1
Ti (i rdmi r T ) T q j
TiT q k
直线单级倒立摆系统建模与磁悬浮建模与模型
直线单级倒立摆系统建模。
图 错误!文档中没有指定样式的文字。
-1(a)为直线单级倒立摆实际设备,为方便分析,将其抽象这小车与摆杆的示意图,如图 错误!文档中没有指定样式的文字。
-1 (b)所示。
倒摆的参数与量纲见表 错误!文档中没有指定样式的文字。
-1。
由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。
这和手持木棒使之直立不倒的现象很类似,研究此系统很有意义,如在火箭发射时,火箭必须靠开发动机来维持它沿推动力方向飞行。
显然,若对小车不加控制,摆杆的倒立状态是不稳定的平衡状态,若稍有振动摆杆必然倒下,实际上,这就是稳定性的含义。
这里暂不讨论如何控制的问题。
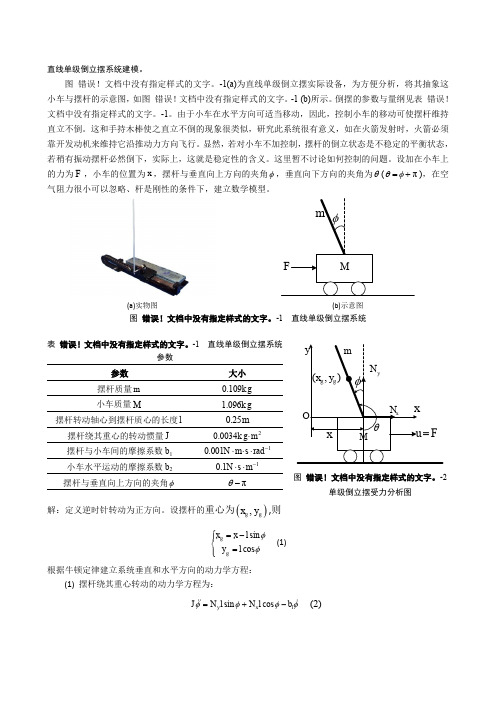
设加在小车上的力为F ,小车的位置为x ,摆杆与垂直向上方向的夹角φ,垂直向下方向的夹角为θ(πθφ=+),在空气阻力很小可以忽略、杆是刚性的条件下,建立数学模型。
(a)实物图(b)示意图图 错误!文档中没有指定样式的文字。
-1 直线单级倒立摆系统表 错误!文档中没有指定样式的文字。
-1 直线单级倒立摆系统参数参数 大小 摆杆质量m 0.109kg 小车质量M1.096k g摆杆转动轴心到摆杆质心的长度l 0.25m摆杆绕其重心的转动惯量J 20.0034k g m ⋅摆杆与小车间的摩擦系数b 1 10.001N m s rad -⋅⋅⋅ 小车水平运动的摩擦系数b 2 10.1N s m -⋅⋅摆杆与垂直向上方向的夹角φπθ-图 错误!文档中没有指定样式的文字。
-2单级倒立摆受力分析图解:定义逆时针转动为正方向。
设摆杆的重心为(),g g x y ,则sin cos g gx x l y l φφ=-⎧⎪⎨=⎪⎩ (1) 根据牛顿定律建立系统垂直和水平方向的动力学方程:(1) 摆杆绕其重心转动的动力学方程为:1sin cos y x J N l N l b φφφφ=+- (2)式中,J 为摆杆绕其重心的转动惯量:22112123J mL L l ml ==。
倒立摆原理

倒立摆原理的基本原理倒立摆是一种具有非线性动力学特性的系统,它由一个可以在垂直平面上旋转的杆和一个连接在杆顶端的质量块组成。
倒立摆在控制理论、机器人学和自动化领域有着广泛的应用,例如机器人控制、姿态稳定等。
倒立摆系统具有很高的非线性特性,因为它受到重力、惯性、摩擦等多种因素的影响。
为了使倒立摆保持平衡,需要对其进行控制,以实现杆垂直或近似垂直于地面。
动力学模型为了分析倒立摆系统的动力学行为,我们首先需要建立其动力学模型。
假设杆的长度为L,质量为m,质量块与杆之间没有弹簧和阻尼,并且杆与地面之间也没有摩擦。
根据牛顿第二定律和角动量定理,可以得到倒立摆系统的运动方程:1.杆绕固定点(底部)转动:Iθ=mL2θ=−mgLsin(θ)2.质量块沿杆方向运动:mLẍ=−mgsin(θ)其中,θ表示杆与垂直线之间的夹角,x表示质量块在杆上的位置,I表示杆对底部转动的惯性矩。
线性化由于倒立摆系统的动力学方程是非线性的,为了进行控制设计和分析,通常需要对其进行线性化处理。
线性化可以通过泰勒级数展开来实现。
假设倒立摆处于平衡点附近,即θ=0和θ=0,则可以将非线性动力学模型线性化为以下形式:1.杆绕固定点(底部)转动:mL2θ=−mgLθ2.质量块沿杆方向运动:mLẍ=−mgθ这样得到的是一个简化的线性模型,使得控制器设计更加容易。
但需要注意的是,在实际应用中,由于存在误差和不确定性等因素,可能需要对系统进行更复杂的建模和控制。
控制方法倒立摆系统的控制旨在使其保持平衡或实现特定任务。
常用的控制方法包括PID控制、模糊控制和最优控制等。
1.PID控制:PID控制是一种经典的反馈控制方法,通过比较实际输出与期望输出之间的差异,并根据比例、积分和微分三个部分的调节系数来调整控制信号。
在倒立摆系统中,可以根据杆与垂直线之间的夹角和质量块在杆上的位置来计算误差,并通过PID控制器生成合适的力或扭矩来驱动系统。
2.模糊控制:模糊控制是一种基于经验知识的控制方法,它使用模糊逻辑和模糊推理来处理系统不确定性和非线性特性。
直线一级倒立摆的牛顿—欧拉方法建模
直线一级倒立摆的牛顿—欧拉方法建模首先,我们需要定义系统的坐标和状态变量。
在这个问题中,我们可以选择将质点的位置和角度作为系统的状态。
令x表示质点的水平位置,θ表示摆杆与竖直方向的夹角。
其次,我们需要确定系统的动力学方程。
根据牛顿第二定律和欧拉定理,可以得到如下的动力学方程:m * x'' = -m * g * sin(θ) - c * x';I * θ'' = m * g * cos(θ) * L - J * θ'其中,m是质点的质量,g是重力加速度,c是摩擦系数,L是摆杆的长度,I是质点关于摆杆固定点的转动惯量,J是摆杆的转动惯量。
最后,我们可以采用数值方法来求解这个动力学方程。
牛顿-欧拉方法是一种常用的数值方法,它基于一阶泰勒级数展开近似,并使用离散时间步长来进行数值计算。
具体步骤如下:1.将时间t离散化为n个时间步长Δt的序列:t_0,t_1,...,t_n。
2.初始化系统的状态变量:x(0),θ(0),x'(0),θ'(0)。
3.对于每个时间步长i,计算状态变量的更新:a. 计算加速度:x''(i) = (1/m) * (-m * g * sin(θ(i)) - c * x'(i))θ''(i) = (1/I) * (m * g * cos(θ(i)) * L - J * θ'(i))b.使用泰勒级数展开逼近位置和速度:x(i+1)=x(i)+Δt*x'(i)+0.5*Δt^2*x''(i)θ(i+1)=θ(i)+Δt*θ'(i)+0.5*Δt^2*θ''(i)c.使用泰勒级数展开逼近速度和加速度:x'(i+1)=x'(i)+Δt*x''(i)θ'(i+1)=θ'(i)+Δt*θ''(i)d.根据实际情况对状态进行调整,如质点位置不能超过摆杆范围等。
倒立摆系统的课程设计
倒立摆系统的课程设计一、课程目标知识目标:1. 学生能够理解倒立摆系统的基本概念,掌握其物理原理;2. 学生能够描述倒立摆系统的动态特性,了解系统稳定性与不稳定性的影响因素;3. 学生能够运用数学方法分析倒立摆系统的运动方程,并求解平衡条件。
技能目标:1. 学生能够运用物理知识建立倒立摆系统的数学模型;2. 学生能够通过实验观察和分析倒立摆系统的运动状态,并提出改进措施;3. 学生能够利用控制理论知识,设计简单的倒立摆稳定控制系统。
情感态度价值观目标:1. 学生对物理现象产生好奇心,培养探究科学问题的兴趣;2. 学生在小组合作中,学会沟通、协作,培养团队精神;3. 学生通过解决实际问题,体验科学研究的乐趣,增强自信心。
课程性质:本课程为物理学科选修课程,结合实际生活中的倒立摆现象,培养学生运用物理知识解决实际问题的能力。
学生特点:本课程面向高中二年级学生,他们已具备一定的物理知识和实验技能,具有较强的逻辑思维能力和动手操作能力。
教学要求:结合学生特点,注重理论与实践相结合,强调学生的主体地位,鼓励学生主动探究、合作学习,提高解决问题的能力。
通过本课程的学习,使学生能够将所学知识应用于实际问题的解决,培养创新精神和实践能力。
二、教学内容本课程教学内容主要包括以下几部分:1. 倒立摆系统基本概念:介绍倒立摆的定义、分类及在实际中的应用,如机器人、玩具等。
2. 倒立摆系统的物理原理:分析倒立摆系统的受力情况,探讨重力、摩擦力等对系统稳定性的影响。
3. 倒立摆系统的数学建模:引导学生运用牛顿运动定律、拉格朗日方程等方法建立倒立摆系统的数学模型。
4. 倒立摆系统的动态特性:研究系统在不同参数下的运动状态,分析稳定性与不稳定性的条件。
5. 倒立摆系统的控制方法:介绍PID控制、状态反馈控制等基本控制方法,并探讨其在倒立摆系统中的应用。
6. 实践操作:组织学生进行倒立摆实验,观察系统运动状态,分析实验结果,并提出改进措施。
二级倒立摆的建模问题

目录摘要 ..................................................................................... 错误!未定义书签。
ABSTRACT ................................................................................ 错误!未定义书签。
第1章绪论 .. (1)1.1研究背景和意义 (1)1.2国内外研究现状 (2)1.3 模糊控制的简介 (3)1.4倒立摆的最优控制与模糊控制与神经网络系统的简要比较 (4)第2章控制方案 (6)2.1模糊控制方案 (6)2.2 PID方案 (7)2.3模糊控制与PID控制的比较 (8)第3章控制系统的设计 (9)3.1二级倒立摆数学模型的建立 (9)3.2二级倒立摆的最优状态反馈控制 (15)3.3融合函数的设计 (16)3.4模糊控制器的设计 (18)第4章控制仿真 (23)4.1二级倒立摆模糊控制的调试 (23)4.2二级倒立摆PID控制的调试 (26)4.3模糊控制与PID控制的比较 (28)第5章结论 (29)参考文献 (30)致谢 (32)第1章绪论1.1研究背景和意义1.1.1 研究倒立摆的工程背景20世纪60年代到现在以来,可以看到科学家们为了处理侦察卫星在摄像机的轻微抖动时等不利状况,并且摄像机的轻微抖动时等不利状况对摄像的图像质量产生的一些或小或大的影响,为了使摄像机能自动地保持摄像时摄像的图像质量稳定,并且能够消除摄像机摄像的震动。
尽管第一台机器人从制作出来问世至今已有三十年的历史,机器人的一些关键技术一直没有很好地被处理,可以看到就像机器人的行走的控制至今仍未能很好解决和得以很好的控制。
在看到通信卫星在预先计算好的轨道运行时必须要保持其稳定,并且要通信卫星在确定的位置上运行的同时,必须要保证通信卫星的稳定,从而使卫星天线的线能够恒定的指向地球。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
倒立摆拉格朗日建模方法(一)
倒立摆拉格朗日建模
介绍
倒立摆是一种经典的控制系统问题,它常用于教育和研究领域。
拉格朗日建模是一种用来描述力学系统动力学的数学方法。
本文将详细介绍倒立摆的拉格朗日建模方法,包括各种方法的详细说明。
方法一:拉格朗日方程
1.第一步:定义坐标系。
倒立摆通常使用极坐标系,其中θ表示
摆杆的角度。
2.第二步:确定系统的势能能量。
根据重力势能的定义,势能能量
可以表示为mgL(1 - cosθ),其中m是摆杆的质量,g是重力加速度,L是摆杆的长度。
3.第三步:确定动能能量。
动能能量可以表示为2θ2,其中L是摆
杆的长度。
4.第四步:应用拉格朗日方程。
拉格朗日方程可以表示为
d/dt(∂T/∂θ̇) - ∂T/∂θ = ∂V/∂θ,其中T是系统的总动能,V 是系统的总势能。
通过求解拉格朗日方程,可以得到系统的运动方程。
方法二:线性化方法
1.第一步:使用欧拉-拉格朗日方程。
欧拉-拉格朗日方程可以表示
为∑(∂L/∂qi)d q̇i = q之力 - q之耗散,其中L是拉格朗日函
数,qi是系统的广义坐标,q i̇是广义速度。
2.第二步:线性化倒立摆方程。
在小角度下,可以通过将sinθ近
似为θ,将cosθ近似为1来线性化倒立摆方程。
3.第三步:线性化的拉格朗日方程可以简化为M q̇ = τ - C q̇ -
Gq,其中M是质量矩阵,q̇是广义加速度,τ是外部输入力矩,C是速度相关的阻尼矩阵,G是重力矩阵。
方法三:控制方法
1.第一步:设计控制器。
倒立摆系统可以用PID控制器来控制。
PID控制器包括比例部分、积分部分和微分部分,可以通过调整
各个部分的参数来实现系统的稳定控制。
2.第二步:实施控制。
将PID控制器的输出作为输入力矩τ,通过
不断调整输入力矩来控制倒立摆的角度。
3.第三步:闭环控制。
通过实施闭环控制,将实际角度与目标角度
进行比较,并根据误差调整控制器的输出,以实现系统的精确控
制。
方法四:倒立摆模拟
1.第一步:选择合适的模拟软件。
倒立摆可以使用MATLAB或
Simulink进行模拟。
这些软件提供了强大的数学建模和仿真功能。
2.第二步:建立模型。
在模拟软件中建立倒立摆的数学模型,包括
系统的动力学方程以及控制器的参数。
3.第三步:运行模拟。
通过运行模拟,可以观察倒立摆的运动轨迹、
角度响应等系统行为,并根据需要调整模型和控制器的参数。
总结
倒立摆的拉格朗日建模方法包括使用拉格朗日方程、线性化方法、控制方法和倒立摆模拟。
这些方法可以帮助我们理解倒立摆系统的动
力学特性,并设计出合适的控制策略。
通过深入研究和实践,倒立摆
问题对于控制系统学习和应用具有重要意义。
方法一:拉格朗日方程
第一步:定义坐标系
倒立摆系统通常使用极坐标系,其中θ表示摆杆的角度。
第二步:确定势能能量
根据重力势能的定义,倒立摆系统的势能能量可以表示为mgL(1
- cosθ),其中m是摆杆的质量,g是重力加速度,L是摆杆的长度。
第三步:确定动能能量
倒立摆系统的动能能量可以表示为2θ2,其中L是摆杆长度。
第四步:应用拉格朗日方程
拉格朗日方程可以表示为d/dt(∂T/∂θ̇) - ∂T/∂θ = ∂V/∂θ,其中T是系统的总动能,V是系统的总势能。
通过求解拉格朗日方程,可以得到系统的运动方程。
方法二:线性化方法
第一步:使用欧拉-拉格朗日方程
欧拉-拉格朗日方程可以表示为∑(∂L/∂qi)d q̇i = q之力 - q之耗散,其中L是拉格朗日函数,qi是系统的广义坐标,q i̇是广义速度。
第二步:线性化倒立摆方程
在小角度下,可以通过将sinθ近似为θ,将cosθ近似为1来线性化倒立摆方程。
第三步:线性化的拉格朗日方程
线性化的拉格朗日方程可以简化为M q̇ = τ - C q̇ - Gq,其中M是质量矩阵,q̇是广义加速度,τ是外部输入力矩,C是速度相关的阻尼矩阵,G是重力矩阵。
方法三:控制方法
第一步:设计控制器
倒立摆系统可以用PID控制器来控制。
PID控制器包括比例部分、积分部分和微分部分,可以通过调整各个部分的参数来实现系统的稳
定控制。
第二步:实施控制
将PID控制器的输出作为输入力矩τ,通过不断调整输入力矩来
控制倒立摆的角度。
第三步:闭环控制
通过实施闭环控制,将实际角度与目标角度进行比较,并根据误
差调整控制器的输出,以实现系统的精确控制。
方法四:倒立摆模拟
第一步:选择模拟软件
倒立摆可以使用MATLAB或Simulink进行模拟。
这些软件提供了
强大的数学建模和仿真功能。
第二步:建立模型
在模拟软件中建立倒立摆的数学模型,包括系统的动力学方程以
及控制器的参数。
第三步:运行模拟
通过运行模拟,可以观察倒立摆的运动轨迹、角度响应等系统行为,并根据需要调整模型和控制器的参数。
总结
倒立摆的拉格朗日建模方法包括拉格朗日方程、线性化方法、控制方法和倒立摆模拟。
这些方法可以帮助理解倒立摆系统的动力学特性,并设计出合适的控制策略。
倒立摆问题对于控制系统学习和应用具有重要意义。