一级倒立摆的建模与控制分析
(完整版)一级倒立摆系统分析
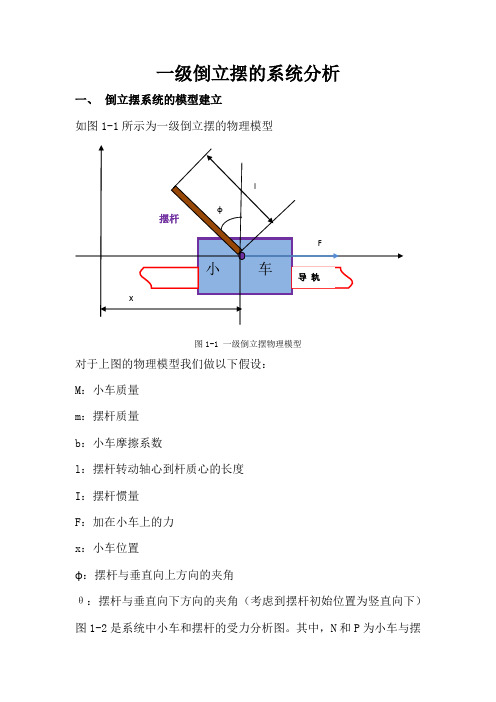
一级倒立摆的系统分析一、倒立摆系统的模型建立如图1-1所示为一级倒立摆的物理模型图1-1 一级倒立摆物理模型对于上图的物理模型我们做以下假设:M:小车质量m:摆杆质量b:小车摩擦系数l:摆杆转动轴心到杆质心的长度I:摆杆惯量F:加在小车上的力x:小车位置ɸ:摆杆与垂直向上方向的夹角θ:摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)图1-2是系统中小车和摆杆的受力分析图。
其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
注意:实际倒立摆系统中的检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。
图1-2 小车及摆杆受力分析分析小车水平方向受力,可以得到以下方程:M ẍ=F-bẋ-N (1-1)由摆杆水平方向的受力进行分析可以得到以下方程:N =md 2dt 2(x +l sin θ) (1-2)即: N =mẍ+mlθcos θ−mlθ2sin θ (1-3)将这个等式代入式(1-1)中,可以得到系统的第一个运动方程: (M +m )ẍ+bẋ+mlθcos θ−mlθ2sin θ=F (1-4)为推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得出以下方程: P −mg =md 2dt 2(l cos θ) (1-5)P −mg =− mlθsin θ−mlθ2cos θ (1-6) 利用力矩平衡方程可以有:−Pl sinθ−Nl cosθ=Iθ (1-7)注意:此方程中的力矩方向,由于θ=π+ɸ,cosɸ=−cosθ,sinɸ=−sinθ,所以等式前面含有负号。
合并两个方程,约去P和N可以得到第二个运动方程:(I+ml2)θ+mgl sinθ=−mlẍcosθ (1-8)设θ=π+ɸ,假设ɸ与1(单位是弧度)相比很小,即ɸ<<1,则可以进行近似处理:cosθ=−1,sinθ=−ɸ,(dθdt )2=0。
用u来代表被控对象的输入力F,线性化后的两个运动方程如下:{(I+ml2)ɸ−mglɸ=mlẍ(M+m)ẍ+bẋ−mlɸ=u(1-9)假设初始条件为0,则对式(1-9)进行拉普拉斯变换,可以得到:{(I+ml2)Φ(s)s2−mglΦ(s)=mlX(s)s2(M+m)X(s)s2+bX(s)s−mlΦ(s)s2=U(s) (1-10) 由于输出为角度ɸ,求解方程组的第一个方程,可以得到:X(s)=[(I+ml2)ml −gs2]Φ(s) (1-11)或改写为:Φ(s)X(s)=mls2(I+ml2)s2−mgl(1-12)如果令v=ẍ,则有:Φ(s)V(s)=ml(I+ml2)s2−mgl(1-13)如果将上式代入方程组的第二个方程,可以得到:(M+m)[(I+ml2)ml −gs]Φ(s)s2+b[(I+ml2)ml+gs2]Φ(s)s−mlΦ(s)s2=U(s) (1-14) 整理后可得传递函数:Φ(s) U(s)=mlqs2s4+b(I+ml2)qs3−(M+m)mglqs2−bmglqs(1-15)其中q=[(M+m)(I+ml2)−(ml)2]假设系统状态空间方程为:X=AX+Buy=CX+Du (1-16) 方程组对ẍ,ɸ解代数方程,可以得到解如下:{ẋ=ẋẍ=−(I+ml2)bI(M+m)+Mml2ẋ+m2gl2I(M+m)+Mml2ɸ+(I+ml2)I(M+m)+Mml2uɸ=ɸɸ=−mlbI(M+m)+Mml2ẋ+mgl(M+m)I(M+m)+Mml2ɸ+mlI(M+m)+Mml2u(1-17)整理后可以得到系统状态空间方程:[ẋẍɸɸ]=[01000−(I+ml2)bI(M+m)+Mml2m2gl2I(M+m)+Mml200010−mlbI(M+m)+Mml2mgl(M+m)I(M+m)+Mml20][xẋɸɸ]+[(I+ml2)I(M+m)+Mml2mlI(M+m)+Mml2]uy=[xɸ]=[10000010][xẋɸɸ]+[0]u(1-18)由(1-9)的第一个方程为:(I+ml2)ɸ−mgl ɸ=mlẍ对于质量均匀分布的摆杆可以有:I=13ml2于是可以得到:(13ml2+ml2)ɸ−mgl ɸ=mlẍ化简可以得到:ɸ=3g4l ɸ+34lẍ(1-19)设X={x, ẋ, ɸ , ɸ},u=ẍ则有:[ẋẍɸɸ]=[010000000001003g4l0][xẋɸɸ]+[134l]uy=[xɸ]=[10000010][xẋɸɸ]+[0]u(1-20)以上公式推理是根据牛顿力学的微分方程验证的。
一级倒立摆的建模及控制分析
直线一级倒立摆的建模及控制分析摘要:本文利用牛顿—欧拉方法,建立了直线型一级倒立摆系统的数学模型。
在分析的基础上, 采用状态反馈控制中极点配置法设计了用于直线型一级倒立摆系统的控制器。
此外,用MATLAB 仿真绘制了相应的曲线并做了分析。
一、问题描述倒立摆控制系统是机器人技术、控制理论、计算机控制等多个领域和多种技术的有机结合,其被控系统本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,是控制理论研究中较为理想的实验对象。
它为控制理论的教学、实验和科研构建了一个良好的实验平台,促进了控制系统新理论、新思想的发展。
倒立摆系统可以采用多种理论和方法来实现其稳定控制,如PID,自适应、状态反馈、智能控制等方法都己经在倒立摆控制系统上得到实现。
由于直线一级倒立摆的力学模型较简单,又是研究其他倒立摆的基础,所以本文利用所学的矩阵论知识对此倒立摆进行建模和控制分析。
二、方法简述本文利用牛顿—欧拉方法,建立了直线型一级倒立摆系统的数学模型。
在分析的基础上, 采用状态反馈控制中极点配置法设计了用于直线型一级倒立摆系统的控制器。
此外,用MATLAB 仿真绘制了相应的曲线并做了分析。
三、模型的建立及分析3.1 微分方程的推导在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图1所示。
图1 直线一级倒立摆系统假设 M 为小车质量;m 为摆杆质量;b 为小车摩擦系数;l 为摆杆转动轴心到杆质心的长度;I 为摆杆惯量;F 为加在小车上的力;x 为小车位置;φ为摆杆与垂直向上方向的夹角;θ为摆杆与垂直向下方向的夹角。
图2是系统中小车和摆杆的受力分析图。
其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。
值得注意的是: 在实际倒立摆系统中检测和执行装置的正负方向已确定, 因而矢量方向定义如图2所示, 图示方向为矢量正向。
(a) (b)图2 小车和摆杆的受力分析图分析小车水平方向所受的合力,可以得到以下方程:N x b F x M --= (1)由摆杆水平方向的受力进行分析可以得到下面等式:θθθθs i n c o s 2ml ml x m N -+= (2) 把这个等式代入上式中,就得到系统的第一个运动方程:()F ml ml x b x m M =-+++θθθθsin cos 2 (3)为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:θθθθc o s s i n 2 ml ml mg P --=- (4) 力矩平衡方程如下:θθθI Nl Pl =--cos sin (5)合并这(4)、(5)两个方程,约去P 和N ,得到第二个运动方程:()θθθc o s s i n 2x ml mgl ml I -=++ (6) 假设φ与1(单位是弧度)相比很小,即φ《1,则可以进行近似处理:0d d s i n 1c o s 2=⎪⎭⎫ ⎝⎛-=-=t θφθθ,, (7) 用u 来代表被控对象的输入力F ,线性化后两个运动方程如下:()()⎩⎨⎧=-++=-+u ml x b x m M xml mgl ml I φφφ 2 (8) 3.2 状态空间方程方程组(8)对φ,x 解代数方程,整理后的系统状态空间方程为: ()()()()()()()()u Mm l m M I m l Mm l m M I m lI x x Mm l m M I m M m gl Mm l m M I m lbMm l m M I gl m Mm l m M I b m l I x x ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡++++++⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+++++-+++++-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡222222222200001000000010φφφφ u x x x y ⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=0001000001φφφ 对于质量均匀分布的摆杆有:3/2ml I =,于是可得:()x ml mgl ml ml =-+φφ223/ 化简得:xll g 4343+=φφ设}{x u x x X ==1,,,,φφ ,则有:14301004300100000000010u l x x l g x x⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡φφφφ10001000001u x x x y ⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=φφφ 3.3 实际系统模型实际系统模型参数: M =1.096 Kg ;m =0.109 Kg ;b =0.1 N/m/s ; l =0.25 m ;I =0.0034 kg ·m ·m ;采样频率 T =0.005 s 。
一级倒立摆系统

直线一级倒立摆建模与性能分析直线一级倒立摆建模及性能分析一、数学模型建立在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图1所示。
u 为外界作用力;x 为小车位移; 为摆杆与铅垂方向的夹角;O 、G 分别为摆杆与小车的链接点、摆杆质心的位置;M 为小车的质量;m 为摆杆的质量;J 为摆杆绕G 的转动惯量;l 为O 到摆杆质心的距离,L 为摆杆的长度;0f 为小车与导轨间的滑动摩擦系数,1f 为摆杆绕 O 转动的摩擦阻力矩系数。
对于上图的物理模型我们做以下假设: M :小车质量 m :摆杆质量 b :小车摩擦系数l :摆杆转动轴心到杆质心的长度 I :摆杆惯量 F :加在小车上的力 x :小车位置ɸ:摆杆与垂直向上方向的夹角θ:摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)其机械部分遵守牛顿运动定律,其电子部分遵守电磁学的基本定律。
因此可以通过机理建模得到系统较为精确的数学模型。
应用牛顿力学来建立系统的动力学方程过程如下: 分析小车水平方向所受的合力,可以得到以下方程:N x b F xM --= 由摆杆水平方向的受力进行分析可以得到下面等式:22(sin )d N m x l dtθ=+即:2cos sin N mx ml ml θθθθ=+-把这个等式代入上式中,就得到系统的第一个运动方程:F ml ml x b x m M =-+++θθθθsin cos )(2(1-1) 为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:22(cos )d P mg m l dtθ-=-即:2sin cos P mg ml ml θθθθ-=+力矩平衡方程如下:θθθ I Nl Pl =--cos sin 注意:此方程中力矩的方向,由于θφθφφπθsin sin ,cos cos ,-=-=+=,故等式前面有负号。
合并这两个方程,约去P 和N ,得到第二个运动方程:θθθcos sin )(2xml mgl ml I -=++ (1-2) 1.1 微分方程模型设φπθ+=,当摆杆与垂直向上方向之间的夹角φ与1(单位是弧度)相比很小,即 1<<φ 时,则可以进行近似处理:1cos -=θ,φθ-=sin ,0)(2=dt d θ。
一级倒立摆的建模与控制分析

研究生《现代控制理论及其应用》课程小论文一级倒立摆的建模与控制分析学院:机械工程学院班级:机研131姓名:尹润丰学号: 2013212020162014年6月2日目录1. 问题描述及状态空间表达式建立............................ - 1 -1.1问题描述................................................................. - 1 -1.2状态空间表达式的建立..................................................... - 1 -1.2.1直线一级倒立摆的数学模型........................................... - 1 -1.2.2 直线一级倒立摆系统的状态方程 ...................................... - 5 -2.应用MATLAB分析系统性能.................................. - 6 -2.1直线一级倒立摆闭环系统稳定性分析......................................... - 6 -2.2 系统可控性分析.......................................................... - 7 -2.3 系统可观测性分析........................................................ - 8 -3. 应用matlab进行综合设计................................. - 8 -3.1状态反馈原理............................................................. - 8 -3.2全维状态反馈观测器和simulink仿真........................................ - 9 -4.应用Matlab进行系统最优控制设计......................... - 11 -5.总结.................................................... - 13 -1.问题描述及状态空间表达式建立1.1问题描述倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
一级倒立摆系统仿真及分析
一级倒立摆系统仿真及分析1•摘要本次课程设讣,我们小组选择一级倒立摆系统作为物理模型,首先通过物理分析建立数学模型,得到系统的传递函数,通过对传递函数的极点,根轨迹,单位阶跃响应来分析系统稳定性。
建立状态空间模型,利用matlab进行能控能观性分析, 输入阶跃信号,分析系统输出响应。
通过设定初始条件,查看系统稳定性,利用simulink绘制系统状态图。
再对系统进行极点配置,进行状态反馈,使得系统在初始状态下处于稳定状态,并绘制系统状态图。
2・;3课程设计目的倒立摆系统是一个经典的快速、多变量、非线性、绝对不稳定系统,是用来检验某种控制理论或方法的典型方案。
倒立摆控制理论产生的方法和技术在半导体及精密仪器加E.机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。
因此研究倒立摆系统具有重要的实践意义。
4.课程设计题目描述和要求本次课程设计•我们小组选择环节项H三:系统状态响应、输出响应的测量。
<环节目的:1. 利用MATLAB分析线性定常系统。
2. 利用SIMULINK进行系统状态空间控制模型仿真,求取系统的状态响应及输出响应。
环节内容、方法:1•给定系统状态空间方程,对系统进行可控性、可观性分析。
并利用SIMULINK 绘制系统的状态图,求取给定系统输入信号和初始状态时的状态响应及输出响应。
2.给定两个系统的状态空间模型,分别求两个系统的特征值;将两个系统的系统矩阵化为标准型;求出给定系统初始状态时,状态的零输入响应;求两个系统的传递函数并分析仿真结果。
4.课程设计报告内容数学模型的建立及分析对于倒立摆系统,山于其本身是自不稳定的系统,实验建模存在一定的困难。
但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。
下面我们采用其中的牛顿一欧拉方法建立直线型一级倒立摆系统的数学模型。
在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图1所示我们不妨做以下假设:M小车质量、m摆杆质量、b小车摩擦系数、I摆杆转动轴心到杆质心的长度、I摆杆惯、F加在小车上的力、x小车位置、<1)摆杆与垂直向上方向的夹角、0 摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)。
一级倒立摆的可视化建模与稳定控制设计
1966年
1976年
1995年
倒立摆的应用
倒立摆的分类
直线倒立摆 一级倒立摆
基座运动
环形倒立摆
摆杆
二级倒立摆
平面倒立摆
多级倒立摆
另外根据材料分类:刚体摆杆倒立摆系统和柔性摆杆倒立摆系统 „„
根据不同的分类方法,我们可以将倒立摆进行不同的分类。
倒立摆的特点
特性:非线性、多变量、强耦合、不稳定性
倒立摆系统拥有低投入、简易的结构、直观 的形象、方便仿真等特点。
设计演示界面
保存文件,命名为 fangzhenjieguo.fig ,同时会自动生成一 个fangzhenjieguo.m 文件
将摆角、小车位 移和时间参量, 导入到工作区中 ,供GUI编程使 用。
打开之前保存演示界面是生成的fangzhenjieguo.m文件,找到 “仿真开始”按钮所对应的回调函数,在函数下方加入程序: sim('daolibaimoxing');%运行仿真模型
初始条件设为[0.1rad,0.5rad/s,0,0],仿真曲线如 图所示,上面图线为摆角,下面为小车位移。
右图为未加控制器前的系统 阶跃响应曲线,可以看出, 摆角和小车位移的曲线都是 发散的。通过与仿真结果比 较,可以看出,加了BP神经 网络控制器的倒立摆系统, 摆角和小车位移曲线趋于稳 定,说明所设计的BP神经网 络控制器能够起到有效的控 制作用。验证了控制器设计 的正确性和可行性。
四、GUI设计
图形用户界面(Graphical User Interface, 简称 GUI,又称图形用户接口)是指采用图形 方式显示的计算机操作用户界面。
GUI具有下面几个方面的基本要求:轻型、 占用资源少、高性能、高可靠性、便于移 植、可配置等特点。
直线一级倒立摆的建模及性能分析
直线一级倒立摆的建模及性能分析1 直线一级倒立摆数学模型的成立 (1)2 直线一级倒立摆系统的实际模型 (5)3 直线一级倒立摆系统的性能分析 (6)相关理论的介绍 (6)倒立摆系统的性能分析 (7)1 直线一级倒立摆数学模型的成立所谓系统的数学模型,是指利用数学结构来反映实际系统内部之间、系统内部与外部某些要紧相关因素之间的精准的定量表示。
数学模型是分析、设计、预测和操纵一个系统的理论基础。
因此,关于实际系统的数学模型的成立就显得尤其重要。
系统数学模型的构建能够分为两种:实验建模和机理建模。
实验建模确实是通过在研究对象上加上一系列的研究者事前确信的输入信号,鼓励研究对像并通过传感器检测其可观测的输出,应用数学手腕成立起系统的输入-输出关系。
机理建模确实是在了解研究对象的运动规律的基础上,通过物理、化学的知识和数学手腕成立起系统内部的输入-状态关系。
关于倒立摆系统,由于其本身是不稳固的系统,无法通过测量频率特性的方法获取其数学模型,实验建模存在必然的困难。
可是通过警惕的假设忽略掉一些次要的因素后,倒立摆系统是一个典型的机电一体化系统,其机械部份遵守牛顿运动定律,其电子部份遵守电磁学的大体定律,因此能够通过机理建模取得系统较为精准的数学模型。
为了简单起见,在建模时忽略系统中的一些次要的难以建模的因素,例如空气阻力、伺服电机由于安装而产生的静摩擦力、系统连接处的松弛程度、摆杆连接处质量散布不均匀、传动皮带的弹性、传动齿轮的间隙等。
将小车抽象为质点,摆杆抽象为匀质刚体,摆杆绕转轴转动,如此就能够够通过力学原理成立较为精准的数学模型。
咱们能够应用牛顿力学的分析方式或欧拉-拉格朗日原理成立系统的动力学模型。
关于直线一级倒立摆如此比较简单的系统,咱们采纳通俗易懂的牛顿力学分析法建模。
为了成立直线一级倒立摆的数学模型,采纳如下的坐标系:图1直线一级倒立摆的物理模型其中,F 为加在小车上的力,M 为小车质量,m 为摆杆质量,I 为摆杆惯量, l 为摆杆转动轴心到杆质心的长度,x 为小车位移,φ为摆杆与垂直向上方向的夹角,b 为小车在滑轨上所受的摩擦力,N 和P 为摆杆彼此作使劲的水平和垂直方向的分量。
一阶倒立摆系统模型分析状态反馈与观测器设计
一阶倒立摆系统模型分析状态反馈与观测器设计一阶倒立摆系统是控制工程中常见的一个具有非线性特点的系统,它由一个摆杆和一个质点组成,质点在摆杆上下移动,而摆杆会受到重力的作用而产生摆动,需要通过控制来实现倒立的功能。
以下是一阶倒立摆系统的模型分析、状态反馈与观测器设计的详细介绍。
一、系统模型分析:一阶倒立摆系统是一个非线性动力学系统,可以通过线性化的方式来进行模型分析。
在进行线性化之前,首先需要确定系统的状态变量和输入变量。
对于一阶倒立摆系统,可以将摆杆角度和质点位置作为状态变量,将水平推力作为输入变量。
在对系统进行线性化之后,可以得到系统的状态空间表达式:x_dot = A*x + B*uy=C*x+D*u其中,x是状态向量,u是输入向量,y是输出向量。
A、B、C和D是系统的矩阵参数。
二、状态反馈设计:状态反馈是一种常用的控制方法,通过测量系统状态的反馈信号,计算出控制输入信号。
在设计状态反馈控制器之前,首先需要确定系统的可控性。
对于一阶倒立摆系统,可以通过可控性矩阵的秩来判断系统是否是可控的。
如果可控性矩阵的秩等于系统的状态数量,则系统是可控的。
在确定系统可控性之后,可以通过状态反馈控制器来实现控制。
状态反馈控制器的设计可以通过选择适当的反馈增益矩阵K来实现。
具体的设计方法是,根据系统的状态空间表达式,将状态反馈控制器加入到系统模型中。
状态反馈控制器的输入是状态变量,输出是控制输入变量。
然后,通过调节反馈增益矩阵K的值,可以实现对系统的控制。
三、观测器设计:观测器是一种常用的状态估计方法,通过测量系统的输出信号,估计系统的状态。
在设计观测器之前,首先需要确定系统的可观性。
对于一阶倒立摆系统,可以通过可观性矩阵的秩来判断系统是否是可观的。
如果可观性矩阵的秩等于系统的状态数量,则系统是可观的。
在确定系统可观性之后,可以通过观测器来实现状态估计。
观测器的设计可以通过选择适当的观测增益矩阵L来实现。
具体的设计方法是,根据系统的状态空间表达式,将观测器加入到系统模型中。
一阶倒立摆控制设计与实现
一阶倒立摆控制设计与实现一阶倒立摆是一种常见的控制系统模型,它由一个垂直的支柱和一个质量为m 的物体组成,物体通过支柱与地面相连。
在控制系统中,我们需要设计一个控制器来控制物体的位置和速度,使其保持在垂直位置上。
本文将介绍一阶倒立摆控制设计与实现的相关内容。
一、一阶倒立摆模型一阶倒立摆模型可以用以下方程描述:m*d^2y/dt^2 = -mg*sin(y) + u其中,y是物体的位置,u是控制器的输出,m是物体的质量,g是重力加速度,t是时间。
该方程可以通过拉普拉斯变换转换为传递函数:G(s) = Y(s)/U(s) = 1/(ms^2 + mg)二、控制器设计为了控制一阶倒立摆,我们需要设计一个控制器来产生控制信号u。
常见的控制器包括比例控制器、积分控制器和微分控制器,它们可以组合成PID控制器。
在本文中,我们将使用比例控制器来控制一阶倒立摆。
比例控制器的输出与误差成正比,误差越大,输出越大。
比例控制器的传递函数为:Gc(s) = Kp其中,Kp是比例增益。
三、闭环控制系统将控制器和一阶倒立摆模型组合起来,得到闭环控制系统的传递函数:G(s) = Y(s)/R(s) = Kp/(ms^2 + mg + Kp)其中,R(s)是参考信号,表示我们期望物体保持的位置。
四、控制系统实现在实现控制系统之前,我们需要对一阶倒立摆进行建模和仿真。
我们可以使用MATLAB等工具进行建模和仿真。
在MATLAB中,我们可以使用Simulink模块来建立一阶倒立摆模型和控制器模型。
在建立模型之后,我们可以进行仿真,观察系统的响应和稳定性。
在实现控制系统时,我们需要选择合适的硬件平台和控制器。
常见的硬件平台包括Arduino和Raspberry Pi等,常见的控制器包括PID控制器和模糊控制器等。
在实现控制系统之后,我们需要进行调试和优化,以达到最佳控制效果。
五、总结本文介绍了一阶倒立摆控制设计与实现的相关内容,包括一阶倒立摆模型、控制器设计、闭环控制系统和控制系统实现。
一阶倒立摆控制设计与实现
一阶倒立摆控制设计与实现以一阶倒立摆控制设计与实现为题,本文将介绍倒立摆控制系统的设计原理和实现过程。
倒立摆是一种经典的控制系统问题,它涉及到动力学建模、控制算法设计和实时控制等多个方面。
本文将从这些方面逐步展开,为读者介绍一阶倒立摆控制的基本知识。
1. 动力学建模倒立摆是一个复杂的动力学系统,它由一个可以旋转的杆和一个连接在杆末端的质点组成。
杆的旋转可以由一个电机控制,质点则受到重力和杆的作用力。
为了建立倒立摆的动力学模型,我们需要考虑杆的旋转角度和质点的位置。
2. 控制算法设计一阶倒立摆的控制目标是使杆保持竖直位置,即旋转角度为零,并且使质点保持在某个给定的位置上。
为了实现这个目标,我们可以设计一个控制器来控制杆的旋转角度和质点的位置。
常用的控制算法有PID控制算法、模糊控制算法和神经网络控制算法等。
PID控制算法是一种经典的控制算法,它通过调节比例、积分和微分三个参数来实现控制效果。
模糊控制算法则利用模糊逻辑的思想,将输入和输出之间的关系用模糊集合表示。
神经网络控制算法则利用神经网络的学习能力,通过训练网络来实现控制效果。
3. 实时控制倒立摆的控制需要实时采集传感器数据,并根据这些数据计算控制信号。
在实际应用中,我们可以使用编码器来测量杆的旋转角度,使用加速度计来测量质点的加速度,然后通过控制器来计算电机的控制信号。
为了实现实时控制,我们可以使用嵌入式系统来实现。
嵌入式系统是一种专门设计用于控制和处理实时数据的计算机系统,它通常由微处理器、存储器和输入输出设备组成。
通过将控制算法和传感器接口集成到嵌入式系统中,我们可以实现倒立摆的实时控制。
总结本文介绍了一阶倒立摆控制的基本原理和实现方法。
倒立摆是一个复杂的动力学系统,控制它需要建立动力学模型,并设计合适的控制算法。
通过实时采集传感器数据并计算控制信号,我们可以实现倒立摆的控制。
希望本文对读者理解一阶倒立摆控制有所帮助,同时也希望读者能够进一步探索和研究这个有趣的控制问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制工程与仿真课程设计报告报告题目直线一级倒立摆建模、分析及控制器的设计组员1专业、班级14自动化1 班姓名朱永远学号1405031009组员1专业、班级14自动化1 班姓名王宪孺学号1405031011组员1专业、班级14自动化1 班姓名孙金红学号1405031013报告评分标准直线一级倒立摆建模、分析及控制器的设计一状态空间模型的建立1.1直线一级倒立摆的数学模型图1.1 直线一级倒立摆系统本文中倒立摆系统描述中涉及的符号、物理意义及相关数值如表1.1所示。
图1.2是系统中小车的受力分析图。
其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
图1.2 系统中小车的受力分析图图1.3是系统中摆杆的受力分析图。
Fs 是摆杆受到的水平方向的干扰力, Fh是摆杆受到的垂直方向的干扰力,合力是垂直方向夹角为α的干扰力Fg。
图1.3 摆杆受力分析图分析小车水平方向所受的合力,可以得到以下方程:()11-设摆杆受到与垂直方向夹角为α 的干扰力Fg ,可分解为水平方向、垂直方向的干扰力,所产生的力矩可以等效为在摆杆顶端的水平干扰力FS 、垂直干扰力Fh 产生的力矩。
()21-对摆杆水平方向的受力进行分析可以得到下面等式:()θsin 22l x dtd m F N S +=- ()31-即:αθθθθsin sin cos 2fF ml ml xm N +-+= ()41-对图1.3摆杆垂直方向上的合力进行分析,可以得到下面方程:()θcos 22l l dtd m F mg P h -=++-()51-即 θθθθαcos sin cos 2 ml ml F mg P g+=++- ()61-力矩平衡方程如下:0cos sin sin cos cos sin =++++θθθθαθα I Nl Pl l F l F g g ()71-代入P 和N ,得到方程:()0cos 2sin sin 2cos sin cos 2cos sin 2222=+-++++θθθθθθθαθαxml ml mgl ml I l F l F g g()81-设φπθ+=,(φ是摆杆杆与垂直向上方向之间的夹角,单位是弧度),代入上式。
假设φ<<1,则可进行近似处理:φφφφφφφ===⎪⎭⎫⎝⎛==2sin ,12cos ,0,sin ,1cos 2dt dN x f F xM --= αsin g S F F =αcos g h F F =由于:231ml I =方程化为:()xm mg ml F g=-+--φφαφα34cos sin 2 ()91-令:()αφαcos sin --=g f F F ,则()91-可化为:xm mg ml F f=-+φφ342 ()101-即是化简后的直线一级倒立摆系统微分方程。
带入实际数据后,微分方程为:mF x f 234.29-+= θθ()111-当忽略了F f 时,系统的微分方程如式(1-12)所示x 34.29+=θθ()121-忽略干扰力后,直线一级倒立摆系统是单输入二输出的四阶系统,考虑干扰力后,直线一级倒立摆系统是二输入二输出的四阶系统。
其内部的4个状态量分别是小车的位移x 、小车的速度x、摆杆的角度θ、摆杆的角速度θ 。
系统输出的观测量为小车的位移x 、摆杆的角度θ。
其控制量为小车的加速度θ将微分方程(1-12)化为关于加速度输入量和角度输出量的传递函数:()()4.2932-=s s R s θ()131-1.2 直线一级倒立摆系统的状态方程实验所使用的直线一级倒立摆系系统是加速度x作为系统的控制输入,所以根据式(1-12)建立系统的状态方程为:xll g xx x x 4343+====φφφφ整理后得到系统状态方程:[][]x x x x y x l g x x l gx x⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡00010000014301004300100000000010φφφφφφφ将实际参数代入得到一级倒立摆系统的状态空间方程为:[][]x x x x y xx x x x ⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡0001000001301004.2900100000000010φφφφφφφ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=04.2900100000000010A ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=3010B ⎥⎦⎤⎢⎣⎡=01000001C ⎥⎦⎤⎢⎣⎡=00D二运动分析、能控性及能观性分析2.1 运动分析线性定常系统非齐次状态方程为:则其解为:系统的输出方程为:则运动分析可以借助计算机的MA TLAB 进行。
用MATLAB 仿真求线性非齐次状态方程的解实例如例1 所示。
例1 已知系统状态方程为用以下MATLAB 程序求系统方程的解。
其中,collect( )函数的作用是合并同类项,而ilaplace( )函数的作用是求取拉普拉斯逆变换,函数det( )的作用是求方阵的行列式,语句phi=subs(phi0,’t ’ ,(t-tao))表示将符号变量 phi0 中的自变量 t 用(t-tao)代换就构成了符号变量 phi , 而语句x2=int(F,tao,0,t)表示符号变量 F 对 tao 在 0 到 t 的积分区间上求积分, 运算结果返回到 x2。
程序执行结果为这表示2.2 系统能控性分析系统的可控性可根据秩判据进行可控性判断。
线性定常连续系统完全可控的充分必要条件是:1()n rank B AB A B n -⋅⋅⋅=,其中n 为系统矩阵A 的阶次,1()n M B AB A B -=⋅⋅⋅为系统的可控性矩阵。
matlab 程序及运行结果如下:>> A=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 29.4 0]; >> B=[0;1;0;3];>> T=ctrb(A,B); >> rank(T) ans = 4由于rank (Ic )=4,可见该系统是完全可控的。
2.3 系统能观测性分析系统的可控性可根据秩判据进行可控性判断。
线性定常连续系统完全可控的充分必要条件是:1n C CA rank N rank n CA -⎡⎤⎢⎥⎢⎥⎢⎥⋅==⎢⎥⋅⎢⎥⎢⎥⋅⎢⎥⎢⎥⎣⎦或21(()())T T T T T T n Trank C A C A C A C n -⋅⋅⋅=其中n 为系数矩阵A 的阶次。
matlab 程序及运行结果如下:>> A=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 29.4 0]; >> C=[1 0 0 0;0 0 1 0]; >> T0=obsv(A,C); rank(T0) ans = 4由于rank (T0)=4,故该系统是可观测的。
三 状态反馈与状态观测器设计3.1状态反馈原理设n维线性定常系统:Cx y Bu Ax x=+=, 其中x,u,y 分别是n 维、p 维、q 维向量;A 、B 、C 分别是n*n 维,n*p 维,n*q 维实数矩阵。
状态反馈系统的控制量u 取为状态x 的线性函数:Kx v u -=其中,v 为p 参考输入向量,K 为p*n 维实反馈增益矩阵。
加入状态反馈后系统的结构图如图3.1所示:图3.1 系统的全状态反馈结构图则系统状态反馈的动态方程为:()Cx y Bv x BK A x=+-=, 3.2状态反馈观测器和simulink 仿真状态反馈的的实现是利用状态反馈使系统的闭环极点位于所希望的极点位置。
而状态反馈任意配置闭环极点的充分必要条件是被控系统可控。
直线一级倒立摆系统是可控的。
设系统期望极点为[]4321λλλλ=[]i i 343432--+---,则系统期望特征多项式为:()()()()()4321*λλλλ----=s s s s s a列写状态反馈系统的特征多项式:()BK A SI +-det令两个特征多项式各项系数对应相等,则可解出K 阵。
由matlab 求出状态反馈矩阵K ,编程如下:A=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 29.4 0];>> B=[0;1;0;3];>> K=acker(A,B,[-2 -3 -4+3i -4-3i])K =-5.1020 -5.8844 35.1673 6.2948系统加入0.1m/s 2的阶跃输入,在构成的状态反馈调节器控制下,MATLAB 中进行系统的阶跃响应仿真,编程如下:A=[0 1 0 00 0 0 00 0 0 10 0 29.4 0];B1=[013];C=[1 0 0 00 1 0 00 0 1 00 0 0 1];D1=[0 0 0 0]';dt=0.005;ieof=801;for i=1:ieof;U(:,i)=[0.1];T(i)=i*dt;end;%%离散化op=[-2 %期望极点-3-4+3i-4-3i];K=place(A,B1,op)Ak0=[(A-B1*K)];Bk0=[B1];Ck0=[C];Dk0=[D1];lqrop=eig(Ak0);x=[0 0 0 0]';dt=0.005;%离散时[dA,dB]=c2d(Ak0,Bk0,dt);%经离散化得到离散状态方程Ak1=[(A-B1*K)];Bk1=[B1];Ck1=[C];Dk1=[D1];sys=ss(Ak1,Bk1,Ck1,Dk1);[Y,X]=lsim(sys,U,T);plot(T,-Y),grid;legend('Cart','VCart','single','Vs');图3.2 极点配置为[-2 -3 -4+3i -4-3i]时的全状态反馈仿真图横轴时间单位秒,从图中可以看出,系统稳定。
四总结通过对一级倒立摆的分析可知,在开环情况下,倒立摆的平衡系统是不稳定的的;通过秩判据可知,其系统是可控可观测的;以上都是利用MATLAB对其进行分析和设计,对其系统进行了稳定性、可控性、可观测性分析,以及极点配置和最优控制设计,从中我们可以看出,MATLAB作为一种交互式计算分析软件,其强大的运算分析功能,集科学计算、程序设计和可视化于一体的高度集成化软件环境,为控制系统的分析设计,特别是高阶系统综合设计,提供了一种方便可靠的途径。