缓冲算子公理-南京航空航天大学精品课程
数据结构第三章考试题库(含答案)

第3章栈和队列一选择题1. 对于栈操作数据的原则是()。
【青岛大学2001 五、2(2分)】A. 先进先出B. 后进先出C. 后进后出D. 不分顺序2. 在作进栈运算时,应先判别栈是否( ①),在作退栈运算时应先判别栈是否( ②)。
当栈中元素为n个,作进栈运算时发生上溢,则说明该栈的最大容量为( ③)。
为了增加内存空间的利用率和减少溢出的可能性,由两个栈共享一片连续的内存空间时,应将两栈的( ④)分别设在这片内存空间的两端,这样,当( ⑤)时,才产生上溢。
①, ②: A. 空 B. 满 C. 上溢 D. 下溢③: A. n-1 B. n C. n+1 D. n/2④: A. 长度 B. 深度 C. 栈顶 D. 栈底⑤: A. 两个栈的栈顶同时到达栈空间的中心点.B. 其中一个栈的栈顶到达栈空间的中心点.C. 两个栈的栈顶在栈空间的某一位置相遇.D. 两个栈均不空,且一个栈的栈顶到达另一个栈的栈底.【上海海运学院1997 二、1(5分)】【上海海运学院1999 二、1(5分)】3. 一个栈的输入序列为123…n,若输出序列的第一个元素是n,输出第i(1<=i<=n)个元素是()。
A. 不确定B. n-i+1C. iD. n-i【中山大学1999 一、9(1分)】4. 若一个栈的输入序列为1,2,3,…,n,输出序列的第一个元素是i,则第j个输出元素是()。
A. i-j-1B. i-jC. j-i+1D. 不确定的【武汉大学2000 二、3】5. 若已知一个栈的入栈序列是1,2,3,…,n,其输出序列为p1,p2,p3,…,p N,若p N是n,则p i是( )。
A. iB. n-iC. n-i+1D. 不确定【南京理工大学2001 一、1(1.5分)】6. 有六个元素6,5,4,3,2,1 的顺序进栈,问下列哪一个不是合法的出栈序列?()A. 5 4 3 6 1 2B. 4 5 3 1 2 6C. 3 4 6 5 2 1D. 2 34 15 6【北方交通大学2001 一、3(2分)】7. 设栈的输入序列是1,2,3,4,则()不可能是其出栈序列。
基于adams的小车式起落架着陆及全机滑跑动态仿真

ii
基于 ADAMS 的小车式起落架着陆及全机滑跑动态仿真
图清单
图 2.1 多体系统动力学建模与求解一般过程 .....................................................8 图 2.2 ADAMS 软件求解方法及过程....................................................................... 11 图 2.3 飞机数字功能样机组成 ...........................................................................14 图 3.1 小车式起落架的结构 ...............................................................................16 图 3.2 小车式起落架结构模型 ...........................................................................18 图 3.3 外筒受力图 ...............................................................................................18 图 3.4 内筒受力图 ...............................................................................................19 图 3.5 车架受力图 ...............................................................................................20 图 3.6 后轮受力图 ...............................................................................................20 图 3.7 前轮受力模型 ...........................................................................................21 图 3.8 缓冲器结构模型 .......................................................................................22 图 3.9 缓冲器受力图 ...........................................................................................24 图 3.10 圆角方形截面结构 .................................................................................25 图 4.1 起落架 CATIA 三维建模..........................................................................29 图 4.2 设计过程 Step 函数结果曲线 ..................................................................31 图 4.3 IMPACT 函数示意图.................................................................................32 图 4.4 ADAMS 仿真模型 .....................................................................................32 图 4.5 缓冲器随行程变化曲线 ...........................................................................35 图 4.6 空气弹簧力随行程变化曲线 ...................................................................35 图 4.7 油液阻尼力随行程变化曲线 ...................................................................35 图 4.8 缓冲器的功量图 .......................................................................................36 图 4.9 轮胎作用力 ...............................................................................................36 图 4.10 后轮冲击载荷 .........................................................................................37 图 4.11 前轮冲击载荷..........................................................................................37 图 4.12 缓冲器行程变化曲线 .............................................................................38 图 4.13 不同重量下的缓冲器行程 .....................................................................39 图 4.14 不同重量下起落架对机身的冲击载荷 .................................................39 图 4.15 空气弹簧力随行程变化的比较曲线 .....................................................40 图 4.16 缓冲器的功量图 .....................................................................................41 图 5.1 理想的变油孔面积曲线形式 ...................................................................46
北京航空航天大学硕士校级公共基础课程设置及课程简介

校级公共基础课程设置(数学和物理)及课程简介(1) 数学基础理论课(简称基础课):数值分析A (54学时,3学分)数值分析B (54学时,3学分)矩阵理论A (54学时,3学分)矩阵理论B (54学时,3学分)数理统计A (54学时,3学分)数理统计B (54学时,3学分)最优化理论与算法A (54学时,3学分)最优化理论与算法B (54学时,3学分)泛函分析(64学时,3学分)微分方程与动力系统(54学时,3学分)数学物理方程(54学时,3学分)注:课程A涵盖课程B的内容,但要求更高,理论性更强。
(2) 近代数学基础课(简称提高课):近世代数与拓扑(36学时,2学分)小波分析(36学时,2学分)随机过程(36学时,2学分)并行计算(36学时,2学分)应用时间序列分析(36学时,2学分)注:部分研究生课程可选修数学系的课程(3) 选修提高课微分流形及应用(36学时,2学分)偏微分方程近代理论(36学时,2学分)(4) 公共物理课量子力学(60学时,3学分)物理学在高新技术中的应用(60学时,3学分)(5) 数学和物理课程表课程代号课程名称学时学分001201 数值分析A 54 3 001202 数值分析B 54 3 001203 矩阵理论A 54 3 001204 矩阵理论B 54 3 001205 数理统计A 54 3 001206 数理统计B 54 3 001207 最优化理论与算法A 54 3 001208 最优化理论与算法B 54 3 001209 泛函分析64 3 001210 微分方程与动力系统54 3 001211 数学物理方程54 3 001212 近世代数与拓扑36 2 001216 小波分析(先修课程《泛函分析》)36 2 001217 随机过程36 2 001219 量子力学60 3 001223 物理学在高新技术中的应用60 3 001225 并行计算36 2 001226 应用时间序列分析36 2 001808 微分流形及应用36 2 001809 偏微分方程近代理论36 2课程代码001201 课程名称数值分析 A学时54 本课程英文名称Numerical Analysis A课程的目的与地位本课程是为我校非数学类优秀研究生开设的一门数学基础理论课。
(2.12.1)--第18讲:卫星瞬时位置的计算

z
Z轴绕X轴顺时针旋转ik,即可将两坐标系统重合.
Xk
xk
Yk
Rz(Lk )
R x(ik )yk
r 0
Z
k
0
Ƴ 春分点 GAST
1
R x
(i x
)
0
0
00
cos ik
sin
i k
sin ik
cos i k
cos
L k
sin L k
卫星电文中提供了一个星期的历元开始时刻的格林尼治
恒星时GAST。因为地球自转,GAST随之不断增加,其
速率即为地球自转的角速度。故观测时刻t的格林尼治恒
星时为 则:
GAST GAST et
z
Lk oe tk GAST et
Lk 0e GASTw ( e )tk etoe
Z
r 0
卫星
参数
δu= δr= δi= uk= rk= ik=
PG01
卫星 参数
-0.0000068918
xk=
58.7838456610
yk=
-0.0000001370
Ωk=
2.6549535422
Xk=
26647088.709114
0.9751048907
Yk=
Zk=
PG01
-23553617.3511 12461719.2373 -2.3335250677 21328035.0409 12197392.7551 10315321.9990
Z
r 0
而WGS-84坐标系则是随地球旋转的地球坐标系。
Ƴ
春分点 GAST
故首先要计算出升交点在观测时刻t的大地经度。
lec1
则 tn 1 tn
f f 2 f v v t x x 2
有限差分方法
f n 1 n fi fi / t i n f n n f i 1 f i 1 / 2 x i n 2 f n n 2 2 f in f 2 f / 1 i 1 i x i
密度
温度
丰富的结果
超新星爆震波与星周壳
丰富的结果
湍流
瑞利-泰勒不稳定性
N体模拟
甚至从牛顿开始,科学家就被N体问题所困扰,3体以上的问题 无解析解,仅质心方程能被分离出来。数值模拟提供了研究N体 问题的方法
直接计算
N2
TREE算法
N ln N
吸积盘by SPH J. Hawley et al.
有限差分方法
以一维对流扩 散方程为例
f f 2 f v v t x x 2
初条: f (0, x ) f 0 (x ), (0 x L )
边条: f (t ,0) f1 (t )
f (t , L ) f 2 (t )
x i 1 x i
令时间步长为
纯实 验
纯理 论
1. Shibata 2. NASA的飞机15万->6千 3 核试验
数值模拟--为什么
1.
科学研究的精确化使得线性化和小参数展开不再适用, 有必要直接研究非线性问题或求解非线性偏微分方程. 60-70年代随着计算机的出现以及高精度算法的发展 极端的参数(如高磁雷诺数)及复杂的边界条件(如天气 预报) 使得解析求解和实验模拟(如风洞)不再十分有效. 成为一种越来越重要的研究手段
计算天文
陈鹏飞
P. F. Chen
常微分方程教学大纲-北京航空航天大学
《概率统计B》教学大纲课程编号:A09B204B课程中文名称:概率统计B课程英文名称:Probability Theory and Mathematical Statistics学时/学分:32/2开课学期:□√秋季先修课程:高等数学,或工科数学分析;线性代数,或工科高等代数执笔人:邢家省一、课程教学目标概率统计是工科大学的一门基础课。
本课程的任务是使学生获得概率论、数理统计的基本理论方法和基本运算技能,学会对随机问题进行定量分析,培养学生分析随机问题、解决随机问题的能力。
本课程具有独特的科学认识方法意义,并且能为后续课提供必要的数学理论基础,为培养创新人才提供必要的知识结构和思想方法。
2、教学内容及基本要求第1章随机事件的概率(4学时)随机事件与样本空间;概率的公理化定义与性质;条件概率与乘法公式;全概率公式与贝叶斯公式;事件的独立性。
基本要求:1.理解随机事件和样本空间的概念,掌握事件之间的关系与运算;2.理解并熟练掌握概率的古典定义,会作计算;3.了解几何概率,了解概率的统计定义、公理化定义;4.熟练掌握概率的基本性质,会用于计算;5.理解并掌握条件概率的定义,掌握乘法公式、全概率公式与贝叶斯公式;6.理解并会运用事件独立性的概念。
第二章随机变量及其分布(4学时)随机变量;随机变量的分布函数;离散型随机变量及其概率分布;两点分布,二项分布,泊松(Poisson)分布;连续型随机变量及其概率密度;均匀分布,指数分布,正态分布。
基本要求:1.理解随机变量的概念;2.理解并熟练掌握分布函数、分布律、概率密度等概念及其性质,掌握分布函数与分布律,分布函数与概率密度的关系;3.掌握两点分布、二项分布、泊松分布、均匀分布、指数分布,熟练掌握正态分布,会查标准正态分布表。
第三章 二维随机变量的分布(4学时)二维随机变量及其联合分布; 边沿分布函数; 边沿分布律与条件分布律; 边沿概率密度与条件概率密度; 相互独立的随机变量。
大挠度空间梁的静、动力学建模、分析与计算
综合以上文献的研究埘以看出,建模是基于Hamilton原理或者牛顿第二运动定 律,在考虑到电子大变形掰雩{超稿位移一应变韵鞯线镶菸盛保留撵瞧粱在弯曲变形 黠熬夸熬辫率瓣嚣绞篷磺翡肇疆上接导爨寒豹粱懿丈挠度运动凌力学徽分方程。~ 系列实验和实践表明,保留到二阶或者量阶非线性项的影响所建立的梁的大挠度送 嬲微分方程是瀵怒工程或麓装求豹。
1.2.1静力学方程的求解方法概述
对于大挠度梁结构来说,位移和应变之间的已经不再表示为线性关系。而且由 于梁结构的大挠度变形,位移和应变之间呈非线性关系,刚度矩阵也不再是常数矩 阵,而是单元位移的矩阵函数。几何非线性有限元是在传统方法的基础上,引入了
大挠度空间梁的静、动力学建模、分析与计算
应变与位移之间的几何非线性关系,然后再将系统动力学方程中的非线性项作’近 似变换,非线性项就可以表示为与节点位移有关的几何刚度矩阵㈣㈣,即
influence of the nonlinearity is obvious,the conclusion drawn from the present method is
same the
to the conclusion ofthe other correlative literatures。
南京航空航天大学 2001年数据结构与程序设计 考研真题及答案
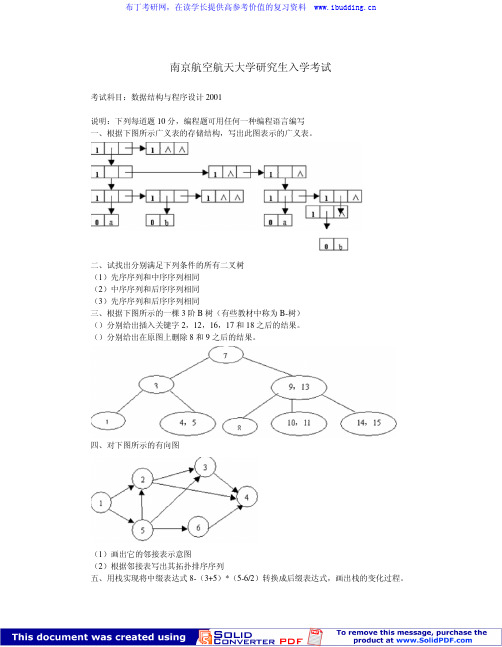
南京航空航天大学研究生入学考试
考试科目:数据结构与程序设计2001
说明:下列每道题10分,编程题可用任何一种编程语言编写
一、根据下图所示广义表的存储结构,写出此图表示的广义表。
二、试找出分别满足下列条件的所有二叉树
(1)先序序列和中序序列相同
(2)中序序列和后序序列相同
(3)先序序列和后序序列相同
三、根据下图所示的一棵3阶B树(有些教材中称为B-树)
()分别给出插入关键字2,12,16,17和18之后的结果。
()分别给出在原图上删除8和9之后的结果。
四、对下图所示的有向图
(1)画出它的邻接表示意图
(2)根据邻接表写出其拓扑排序序列
五、用栈实现将中缀表达式8-(3+5)*(5-6/2)转换成后缀表达式,画出栈的变化过程。
六、已知两个链表A和B分别表示两个集合,其元素递增排列。
编一函数,求A与B的交集,并存放于A链表中。
七、已知一棵二叉树用二叉链表存储,编写递归函数,判断其是否是平衡二叉树。
八、编写程序将一整数序列中所有负数移到所有正数之前,要求时间夊杂度为O(n)
九、已知n个顶点的有向图用邻接矩阵表示,编写函数,计算每对顶点之间的最短路径。
十、编程,判断一棵用二叉链表表示的二叉树是否是完全二叉树。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定理6.1.6 设X=(x(1),x(2), …,x(n)),令
XDi=(x(1)di,x(2)di, …,x(n)di) 其中 x(k 1) x(k )
其中为冲击扰动项,则称X为冲击扰动序列. 要从冲击扰动序列X出发实现对真实行为序列X(0)的系 统之变化规律的正确把握和认识,必须首先跨越障碍 . 如果不事先排除干扰,而用失真的数据X 直接建模、预 测,则会因模型所描述的并非由X(0) 所反映的系统真实 变化规律而导致预测的失败。
二、缓冲算子公理(the axioms of buffer operator) 定义6.1.2 设系统行为数据序列为 X=(x(1),x(2), …,x(n)) ,若 1 k=2,3, …,n ,x(k)-x(k-1)>0则称X 为单调增长序 列; 2 1中不等号反过来成立,则称X 为单调衰减序列; 3 存在k,k1 ,有 x(k)-x(k-1)>0 x(k1)-x(k1-1)<0 则称X为随机振荡序列.设 M=max{x(k)|k=1,2, …,n},m=min{x(k)|k=1,2, …,n} 称M-m 为序列X 的振幅.
四、实用缓冲算子的构造 定理6.1.4 设原始数据序列X=(x(1),x(2), …,x(n)),令 XD=(x(1)d,x(2)d, …,x(n)d) 其中 1 x(k )d [ x(k ) x(k 1) x(n)] n k 1 则当X为单调增长序列、单调衰减序列或振荡序列时,D皆为 弱化算子(weakening operator). 推论6.1.1 对于定理6.1.4中定义的弱化算子D,令 XD2=(x(1)d2,x(2)d2, …,x(n)d2) 1 x(k )d 2 [ x(k )d x(k 1)d x(n)d ] n k 1 则D2对于单调增长、单调衰减或振荡序列,皆为二阶弱化 算子。
公理6.1.1(不动点公理, Axiom of Fixed Points) 设X为系统行为数据序列,D为序列算子,则D满足 x(n)d=x(n) 公理6.1.2(信息充分利用公理, Axiom on Sufficient Usage of Information)系统行为数据序列X 中的每一个数据x(k),k=1,2, …,n,都应据序列,D为作用于X的算 子,X经过算子D作用后所得序列记为 XD=(x(1)d,x(2)d, …,x(n)d) 称D为序列算子,称XD为一阶算子作用序列. 序列算子的作用可以进行多次,若D1,D2,D3皆为序列算子, 我们称D1D2为二阶算子,并称 X D1D2=(x(1)d 1d2, x(2)d 1d2 , …,x(n)d 1d2) 为二阶算子作用序列.
南京航空航天大学经济管理学院 精品课程群建设组
6.1 序列算子(sequence operator) 一、冲击扰动系统预测陷阱 定义6.1.1 设 (0) ( 0) ( 0)
X ( x (1), x (2), , x(0) (n))
为系统真实行为序列,而观测到的系统行为数据序列为
X ( x(1), x(2), , x(n)) ( x(0) (1) 1 , x(0) (2) 2 , , x(0) (n) n ) X ( 0)
x(k )d
定理6.1.5 设原始序列和其缓冲序列分别为 X=(x(1),x(2), …,x(n)) XD=(x(1)d,x(2)d, …,x(n)d) 其中 x(1) x(2) x(k 1) kx (k )
2k 1
x(n)d=x(n) 则当X为单调增长序列或单调衰减序 列时,D皆为强化算子(strengthening operator). 推论6.1.2 设D为定理6.1.5中定义的强化算子,令 XD2=(x(1)d2,x(2)d2, …,x(n)d2) 其中 x(n)d2=x(n)d=x(n) x(1)d x(2)d x(k 1)d kx (k )d 2 x(k )d 2k 1 则 D2 对于单调增长序列和单调衰减序列皆为二阶强化算 子.
三、缓冲算子的性质 定理6.1.1 设X为单调增长序列,XD为其缓冲序列,则有 1 D为弱化算子x(k)≤x(k)d 2 D为强化算子x(k) ≥x(k)d 定理6.1.2 设X为单调衰减序列,XD为其缓冲序列,则有 1 D为弱化算子x(k) ≥x(k)d 2 D为强化算子x(k) ≤ x(k)d 定理6.1.3 设X为振荡序列,XD为其缓冲序列,则有 1 D为弱化算子 max{x(k)} ≥max{x(k)d} min {x(k)} ≤ min{x(k)d} 2 D为强化算子 max{x(k)} ≤ max{x(k)d} min {x(k)} ≥ min{x(k)d}
公理6.1.3(解析化、规范化公理, Axiom of Analytic Representations)任意的x(k)d,皆可由一个 统一的x(1), x(2), …,x(n)的初等解析式表达。
定义6.1.4 称上述三个公理为缓冲算子三公理 (three axioms of buffer operators),满足缓冲算子 三公理的序列算子,称为缓冲算子,一阶、二 阶、 … …缓冲算子作用序列称为一阶、二 阶、 … …缓冲序列(buffer sequences)。 定义6.1.5 设X为原始数据序列,D为缓冲算子,当 X分别为增长序列,衰减序列或振荡序列时: 1 若缓冲序列XD比原始序列X的增长速度(或衰 减速度)减缓或振幅减小,我们称缓冲算子D为 弱化算子; 2 若缓冲序列XD比原始序列X的增长速度(或衰 减速度)加快或振幅增大,则称缓冲算子D为强 化算子.