双电机传动机械系统的同步控制
浅析多电机的同步控制策略析

浅析多电机的同步控制策略析摘要:本文分析了多电机同步控制技术,并讨论了控制策略和控制策略比较,同时展望了多电机的同步控制特性,如何控制多电机的同步精度已成为工业控制中的关键技术。
基于同步控制技术的理论,设计了同步控制系统的硬件平台。
在硬件平台的基础上,设计了软件部分。
通过改进同步控制算法,提高了同步精度。
关键词:多电机;同步控制;策略一、引言随着现代科学技术的发展和机电一体化水平的提高,电机已成为现代工业自动化系统中的重要执行机构。
电机由于其结构紧凑、控制方便、运行稳定、响应快等优良特性,应用于自动化程度高的场合,需要对印刷机械、制造等速度、位置、力矩等进行精确控制。
造纸机械、纺织机械、工业机器人、高速电梯、数控机床等重要行业得到广泛应用。
在许多工业自动化系统中,常常需要同时使用多个电机。
当电机之间存在速度和位置约束时,需要采用适当的控制策略来协调各电机的运行。
为了满足实际需要。
二、多电机同步控制技术多电机同步控制技术有着广泛的应用,如科学、自然科学、工程和社会。
同步控制技术是影响产品质量和生产效率的关键因素。
所谓的电机同步是指系统中的每个电机必须根据要求在自身运行和其他电机运行之间保持一定的关系。
通常有三种类型的不变关系:(1)在系统中的所有电机的速度或位移被保持相同,它是一个同步控制系统里最简单的系统。
(2)同步控制的多台电机的速度或角位移,维持一个不变的比例系数。
例如,在许多情况下,系统中的各个电机速度或位移并不要求保持同一个数据,但要求各台电机之问维持一定的比值。
(3)此外,除了上述两种情况外,还有第三种情况,在某些生产情况下,要求电机之间的速度或位移保持一个固定的差值,而不是要求它们之间保持一种比例系数。
同步控制系统的判断基于两个不同:同步差值和跟踪差值。
同步差异是电机之间的速度或位移的差异。
它反映了不同电机之间的同步。
跟踪差值是单台电机的输出值和给定值的比较,他反应的是电机本身对设定值的响应情况。
双振动电机转速同步的原理和解析(二)

双振动电机转速同步的原理和解析(二)3 双振动电机机械的进动运动将左右两台振动电机对称的装在筛体纵向中心线的两侧,筛体通过弹簧支撑在筛架上,左右偏重转子转向相反,如图2所示:设左右偏重块质量均为m0,两侧偏重转子的偏心距为γ,左偏重转子角速度为ω1 ,右偏重转子角速度ω2 ,且ω1>ω2,筛体质量为M(含2 m0)、筛体回转角速度为Ω、回转振幅为λ,按两种情况分析转子进动问题。
3.1 独立转子进动运动加设将筛体平均分成左右两个独立的分筛体,质量各位1/2M,则与上节中单台振动电机机械一样,各自组成独立的转子进动系统。
左右分筛体,各自以不同的角速度进行同步进动。
若左右振动电机以相同的角速度旋转时,由于电机相对转向相反,两个分筛体的横向惯性分力相互抵消,纵向惯性分力相互叠加,形成纵向惯性往复运动。
在同步进动的情况下,两个分筛体独立进步运动之和与整体筛体的进动运动是相等的,两个独立的偏重转子可与一个整体筛体同时做同步运动。
3.2 一个整体筛体时转子进步运动若左右振动电机的角速度不同,且ω1稍大于ω2 ,ω1—ω2=△ω。
由于两台振动电机固定在同一筛体上,当两台振动电机工作时,左右偏重转子各自独立旋转,此时,偏重转子与筛体的动力学关系是,筛体M作为两偏重转子的共同支承系统,由于ω1≠ω2 ,故M不肯能对不同角速度的两个偏重转子同时做同一的同频回转相应、即不能实现同步进动。
实际上,此刻两偏重转子与筛体都是处于非同步进动状态,是惯性力不平衡的过渡状态。
振动电机偏重转子在电磁扭矩的驱动下作语速旋转,产生激振力。
迫使筛体做同步回转,产生惯性力,此筛体惯性力即是振动电机的负载。
根据电机负载特征,振动电机电流随负载成正比变化。
负载决定电流大小。
也就是Ω决定电流大小。
Ω比ω1 小,则电机电流在满足Ω回转角速度的筛体惯性力负载下,从与ω1角速度相适应的激振力电流自行下至与ω1—△ω角速度相适应的激振力电流,是电机激振力角速度与一半筛体惯性力的角速度相等,非同步进动恢复到同步进动,系统惯性力又恢复平衡。
浅析plc控制的多电机同步系统
浅析PLC控制的多电机同步系统摘要:通过对不同控制方法的分析,介绍了利用Omron系列PLC做为主控元件的多电机同步运行系统。
关键词:PLC 同步随动闭环电动机近年来,随着我国包装,分切,印刷,涂层等行业的蓬勃发展,做为配套的电气控制环节则对产品的质量起着关键的作用,目前以PLC做为中心控制元件的设备占有相当大的比重,并以其精确的控制,稳定的工作状态占据了十分重要的地位。
而在这些控制系统中核心问题便是各动力驱动轴的同步运行,即各电机的同步运行。
本文将介绍分析几种以OMRON系列PLC作为主控元件来实现多电机同步运行的方案。
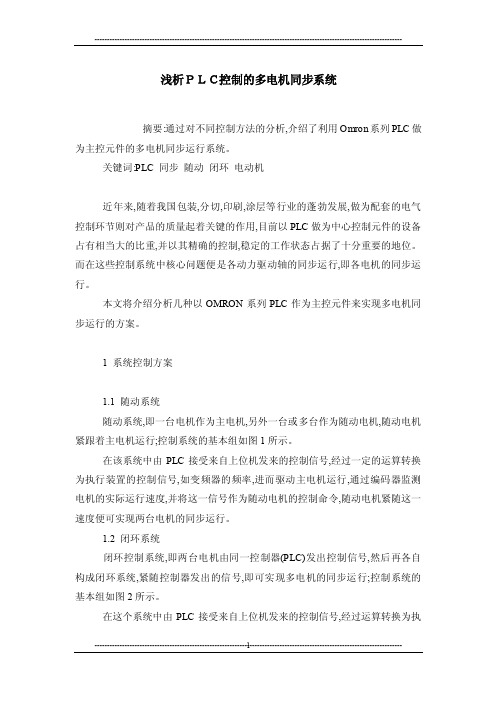
1 系统控制方案1.1 随动系统随动系统,即一台电机作为主电机,另外一台或多台作为随动电机,随动电机紧跟着主电机运行;控制系统的基本组如图1所示。
在该系统中由PLC接受来自上位机发来的控制信号,经过一定的运算转换为执行装置的控制信号,如变频器的频率,进而驱动主电机运行,通过编码器监测电机的实际运行速度,并将这一信号作为随动电机的控制命令,随动电机紧随这一速度便可实现两台电机的同步运行。
1.2 闭环系统闭环控制系统,即两台电机由同一控制器(PLC)发出控制信号,然后再各自构成闭环系统,紧随控制器发出的信号,即可实现多电机的同步运行;控制系统的基本组如图2所示。
在这个系统中由PLC接受来自上位机发来的控制信号,经过运算转换为执行装置的控制信号,同时发到两台电机的驱动器中,由于控制命令是相同的, 通过编码器监测电机的实际速度,与控制命令进行比较,构成闭环控制系统,这样只要两台电机的都紧随控制命令运行便可实现同步。
1.3 随动闭环系统随动闭环控制系统,综合了随动系统和闭环控制系统的特点,在随动控制系统的基础上构成了闭环控制。
两台电机驱动器由同一控制器(PLC)发出控制信号,并各自构成闭环系统,将辅电机的实际速度实时的与主电机进行比较,综合调整,使辅电机紧随主电机的运行速度,即可实现多电机的同步运行。
同步电机的控制方法

同步电机的控制方法
同步电机的控制方法包括:
1. 电压控制法:通过调节电压的大小和频率来控制电机的转速和转向。
通过控制电压的大小,可以实现电机的转速调节,而通过控制电压的频率,可以改变电机的转向。
2. 频率控制法:通过改变电机供电的频率来控制电机的转速和转向。
通过改变供电频率的大小,可以改变电机的转速,使其适应不同的工作负荷。
3. 矢量控制法:通过测量电机的转子位置和速度信息,并与电机的模型进行比较,计算出电机的逆向模型,从而实现对电机的精确控制。
4. 磁场定向控制法:通过对电机的转子磁通进行定向控制,使得转子磁通和定子磁通之间的夹角保持不变,从而实现电机的转速和转向控制。
5. 直接转矩控制法:通过测量电机的转速和转矩信息,并与期望的转速和转矩进行比较,计算出直接转矩指令,从而实现对电机的转矩精确控制。
变频技术在双电机同步驱动控制中的研究
中图分类号 :M3 T 2
文献标识码 : A
文章编号 :0 6 4 1 (0 0)6 0 8 一 1 10 — 3 l2 1 3 — 12 O
1 问题 的 提 出 器 和 转 矩控 制调 节 器 。 以往 薄 膜 幅宽 在 5 m 以 下 的 双 向拉 伸 ( O P或 B P T) 膜 . 2 BP OE 薄 32双 电机 同 步驱 动 同一 负载 的基 本 要 求 两 台 矢 量控 制 变频 -
成 套 设 备 中 , 常横 向拉 伸 机 ( D 左 右 链 铁 的传 动 是 由一 台 电机 器驱动 2台 电机拖动同一个机械 负载 的基本要求是 . 通 T O) ①两台变频器 通过 左 右传 动 轴 和 齿 轮 箱 及链 轮驱 动 的 ; 当薄 膜 幅 宽 超 过 5 m 后 , 必 须保 持 严 格 的 同步 运 行 关 系 两 台 变频 器 之 间 实现 动 态 和 稳 态 . 2 ② 横 向拉 伸 机 (D 设 备 宽 度 相 应 要 增 加 , 薄膜 产 量 的 提 高 , 了 负载 的 自动平 衡 分 配 。 T O) 而 除 有宽 幅 的 拉膜 设 备 外 , 需 要 大 幅提 升 拉 膜 设 备 的 生 产速 度 。 但 生 还 33三 种 基 本 的控 制 方 案 下 面 介 绍 的 三 种 基 本控 制 方 案 可 以 . 产速 度 的 提 高 , 得齿 轮 传 动机 构和 连 接 轴 的 体 积 和 质 量都 相 应 增 满足上述的基本要求。 使 ①转矩跟踪控制方案 1 将两台矢量控制变频 加 , 继 续 沿 用 单 电机 的驱 动 方 式 , 得横 向 拉 伸 机 ( D 的 动 态 器 的其 中 1台作 为主 动 装 置 , 1台作 为 从 动 装 置 , 从 两 装 置 之 若 使 T O) 另 主 机械 负载平衡性及可靠性和机加工精度都很难满足生产工艺要求。 间用串行方式连接成主从控制方式 ;在主动装置上加装一块 S B C2 为此 , 用 两 台 电机 分 别 直 接驱 动 左 右齿 轮 箱 和 链 轮 , 右 齿 接 口板 , 从 动 装 置 上加 装 一块 T 0 艺板 。 产 线速 度 链 的调 速 采 左 在 3 0工 生 轮 箱 之 间 用一 根 传动 轴 刚性 连 接 , 而 降 低 了传 动机 械 的转 动 惯 量 信 号 送 至 主 动 装 置 ,再 经 S B 从 C 2接 口板 分 配 到 从 动 装 置 的 T o 30工 和振动幅度 , 高了动态机械负载平衡性及可靠性 , 提 降低 了机 加 工 艺板 上 ,应 用 T 0 3 0工 艺板 的多 电机传 动控 制功 能 通 过 转 矩 限 制 的 难 度 。 但 由此 引出 的 新 问题 是 如 何 使 控 制 系统 满足 驱 动 左 右 齿 轮 软 特 性 和 补偿 进 行 负 载 平衡 调 节 , 使两 台 变频 器 之 间 实 现 动 态和 稳 箱 两 台同功 率 电机 的 负载 平 衡 和 同步 驱 动 的 要 求。 态 负载 的 自动平 衡 分 配 。该 方 法 的缺 点 是 要增 加 一 块 S B C 2接 口板 2 横 向拉伸机 ( D 对控制 系统的要求 T O) 和一块 T 0 30工艺板。② 转矩跟踪控制方案 2同样将两台矢量控 制 影 响 薄 膜 质 量 的 因素 有 很 多 , 生产 工 艺 参 数 、 备 加 工 和 安 变频器连接成主从控制方式。 如 设 生产线速度链 的调速信号送至主动装 装精度、 生产温度及速度的控制精度 、 生产操作人员的技能等, 都会 置 ,而主 动 装 置 的 转矩 输 出信 号 经 主 动 装置 的 模 拟量 输 出 口 对薄膜质量产生影响。但从薄膜成 套设备 的角度来看 , 向拉伸机 X12 1 2端子送至从动装置 的模拟量输入 口X121 . 横 0. . 22 0. 1 7 8端子 , 作 (D 对 薄膜 的质 量 特 别 是 成 膜率 , 着 直 接 的 影 响 。根 据 薄 膜 生 为从 动 装 置 的转 矩 给 定信 号 , T O) 有 并将 主动 装 置 设 置 成 编 码 器 反馈 的速 产 工 艺 的特 点 , 向拉 伸 机 ( D 除 了与 整 条 生 产 线 要保 持 速 度 链 度 闭环 控 制模 式 , 从 动 装 置 设 置 成 带 编码 器 反 馈 的 直 接 转矩 控 制 横 T O) 而 关 系外 , 本 身左 右 链 条 的 两 台驱 动 电机 还 要 保 持速 度 同步 和 机 械 模式 ,这样从动装置输出的转矩值就紧紧跟随主动 装置 的转矩值 , 其 动 态 负载 平 衡 的关 系 , 则 将 会 出 现 因 两 台 电机 速 度 不 同 步 , 造 确 保 主 从 装 置 的 同步 运 行 以及 动 态 和 稳态 负载 的 自动 平 衡 分 配。 否 而 ③ 成 两 台 电机 承 受 的机 械 负载 不平 衡 , 现 一 台 电机 电流 过 大 , 另 转矩跟 踪控 制方案 3同样 将两 台矢量控 制变频器连接成主从控 制 出 而 台电机电流过小的情况。 严重时还会造成变频器 因电流过大而频 方式。生产 线速度链的调速信号经 P O IU R FB S总线送至主、 从控制 繁 出现过载保护现 象, 使得控制系统无法正常工作 , 这对控 制系统 装置 ,再将 主动 装置 的转矩输 出信号经 主动 装置的模拟量输 出口 和 电机 以 及 机 械 设 备 都 是 极 为 有 害 的 。 因 此 , 要 求 横 向拉 伸 机 Xl22 . 0 .1 2送 至从 动 装 置 的模 拟 量 输 入 口 X 0 . . 2 121 1 子 , 为从 7 8端 作 (D 的 速度 控 制 系 统 要 有 极 高 的稳 速 精 度 和 动 态相 应 品质 , 保 动 装 置 的转 矩 限 幅信 号 ; 际 应 用 时 , 人 为 将从 动 装 置 的 速 度 给 T O) 确 实 先 机 械 负 载 的动 态 平衡 。 点 值 设 成 约 大于 主 动 装 置 的速 度 给 点 值 , 从 动 装 置 实 际 运 转速 度 使 3 横 向拉 伸机 ( D 控 制 系统 组成 和 工 作 原 理 T O) 约 大于 主动 装置 的实 际 运转 速 度 : 果没 有 将 主 动 装 置 输 出 的转 矩 如 31 频 器 的 选 择 采 用 一 般 的 通 用 变 频 器 给 异 步 电动 机 供 电 限幅 信 号送 至 从 动 装 置 的模 拟量 输 入 口 , 为从 动 装 置 的 转矩 限幅 。变 作 时 , 以实 现 电机 无 级 平 滑调 速 。 是 , 速 时有 静 差 , 度 不 高 , 可 但 调 精 调 给 定 信 号 , 么 , 动 装 置 的 实际 转 速 则 大 于 主动 装置 的 实际 转 速 , 那 从 速范围在 h O左右 , l 而且不能像直流调速系统那样提供很高 的动态 所 以从动装置 的实际输 �
动梁式龙门机床的双驱同步控制系统建模

机床 匀速及 S型加 减速 运 动 下 的两轴 不 同步误 差 , 与 Malb Smuik的; 并 t /i l a n 漠型仿 真 结果 进行 对
比. 果表 明 , 两轴 摩擦 特 性及机 械耦 合特 性 的双 驱 同步控 制模 型仿 真 结果 与 实测结果 的相 关 系 结 具 数 达 08 18所 建模 型 能够 有效反 映 动 梁式龙 门机床 双驱 同步 结构 的 运行 状 况 , . 6 , 两轴 机 械耦 合 及 摩擦 力不 同是 解决 双驱动 不 同步 问题 不 可忽略 的 因素. 关键 词 :双 驱动 ; 建模 ; 械耦 合 ; 机 摩擦 ; 同步误 差 不
0253987xofgantrytypemachinetoolsliyuxiaasynchronouscontrolsystemmodelisproposedtostudythereasonsandmechanismthatcausethenonsynchronouserrorsindualdrivingsystemsongantrytypetoolswithtravelingbridgetheproposeddualdrivingmodelisbasedondynamicstheoryanalysisfromwhichtheeffectsofmechanicalcrosscouplinganddifferentfrictionalcharacteristicsonnonsynchronouserrorscanbedescribedexperimentsarecarriedoutonthedk1200machinetoolstoverifytheproposedmodelnonsynchronouserrorsaremeasuredandcomparedwithmatlabsimulinksimulationresultswhenmachinetoolmovesatauniformvelocityandsacceleratedeceleratecurvetheresultsshowthatthecoefficientofcorrelationbetweensimulatedandpracticalexperimentalresultsforthemodelwithmechanicalcouplingandfrictionreachesupto08618themodelcanreflectthestateofmotionofthemachinetoolswellandthefrictiondifferenceandmechanicalcouplingareunignorablefactorsinsolvingtheproblemofnonsynchronouserrorskeywords双电机同步驱动是动梁式龙门数控机床的关键环节其最大的优点是可以获得高的加速度特性及控制带宽但由于双驱同步结构中的电机丝杠等部件从出厂即有特性上的差异加上其他非线性因素如摩擦力不同负载运动环境因素等的影响使龙门框架的移动不能保证一致性
多电机同步操作的常识
多电机同步操作的常识随着现代制造业的发展与机械控制技术的深入研究,多电机同步操作已成为当今工业自动化领域最为重要的控制技术之一。
在实际生产中,多电机同步操作能够使多个电机互相配合、协同工作,从而提高生产效率、降低生产成本、提高产品质量。
本文将从多电机同步操作的原理、应用、常见问题等方面进行探讨。
一、多电机同步操作原理多电机同步操作实质上是通过对多个电机之间的相对位置关系进行精细计算和控制,使得不同电机输出的信号能够始终保持同步。
在实际应用中,多电机同步操作依赖于精准的控制算法和精确的位置反馈传感器。
简单地说,多电机同步操作可以分为两类:硬件同步和软件同步。
硬件同步指的是通过硬件电路将多个电机进行同步,实现电机在控制时采用同步脉冲信号,从而实现多电机的同步。
这种同步方式通常适用于需要高精度的控制环境,如自动化加工线等。
而软件同步则是通过计算机算法控制,实现多个电机之间软件同步。
该方法使用成本较低,可以适用于各种不同场景,如自动化生产线、机器人控制等。
二、多电机同步操作应用多电机同步操作通常适用于生产线上需要将多个电机同步控制的场景,例如切割、加工、装配等过程。
其中,多电机同步操作在包装行业中的应用尤为广泛,由于产品体积较小,高效的包装生产通常需要通过高速连续的包装过程来实现。
多电机同步操作能够保证机器运行时间和稳定性,从而提高生产效率。
另外,在机器人工业中,自动化生产链使用了许多不同的机器人,机器人之间通常需要同步工作以提高生产效率。
多电机同步操作在这种情况下可以保证不同机器人之间的动作协调,并能够实现高效的生产。
三、多电机同步操作的常见问题在实际应用中,多电机同步操作需要面对许多常见问题。
其中最为常见的问题包括:1. 时序精度问题:不完美的信号周期可能导致时序接受误差,从而导致电机同步失败。
2. 位置共振问题:多电机同步需要非常精细的位置反馈传感器,并且需要避开可能产生机械共振的频率范围。
3. 电机导致的振动问题:如果多个电机的振动不同步,则会导致整个工作环境的振动。
同轴多电机同步控制
浅谈同轴多电机同步控制在数控系统中,有时采用多台电机联动虚拟为一个坐标轴,来驱动机床坐标的运动。
最常用的多电机驱动为同步(Synchronous)运动的形式,比如,要求两台以相同的速度和位移运动的电机带动齿轮与齿条啮合作为一个坐标轴运动,这样的坐标轴被称为“同步轴”。
同步技术被广泛应用在数控技术中,比如大跨距龙门机床的龙门直线移动、大型三坐标测量机的双柱直线移动,为保持运动的均匀,都需要两个电机同步驱动。
一、同步控制系统本文主要从TFT-LCD产线内Stoker实现自动搬送的村田Crane Y-Axis四个私服电机的精确同步控制来讨论,使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量较大等特点。
现在我们所需要讨论的是为什么四个伺服电机的转速、定位达到同步,如图1所示。
图1实现同步一般有两种方法:一是机械同步:同步系统由机械装置组成。
这种同步方法容易实现,但机械传动链复杂,传动件加工精度要求高,所需的零件多,难以更换传动比,且占用的空间大。
二是电伺服同步:同步系统由控制器、电子调节器、功率放大器、伺服电机和机械传动箱等组成。
所需机械传动链简单、调试方便、精度高、容易改变电子齿轮比。
在电伺服同步系统中,“同步”的概念是指系统中具有两个或两个以上由电子控制的伺服放大器和伺服电机组成的“控制对象”,其中一个为“主(Master)控制对象”,另外一个或多个为“从(Slave)控制对象”,控制量为机械的位移或速度(对旋转运动为转角或转速)。
通过控制器使“从控制对象”和“主控制对象”的输出控制量保持一定的严格比例关系,这种运动系统称为同步系统。
一般同步系统的输出控制量为位置和速度。
前面所提到的“同步轴”,“主控制对象”与“从控制对象”的输出控制量相等。
为了简化讨论,同步系统中的控制装置可被简化为具有一个积分环节的位置系统,其框图如图2所示。
其中KV为简化后控制装置的位置控制器的开环增益,XC、XO为位置输入、输出;FC为速度指令,Δ为位置误差,KF为速度环增益。
利用PLC和变频器实现多电机速度同步控制
利用PLC和变频器实现多电机速度同步控制在传统的传动系统中,要保证多个执行元件间速度的一定关系,此中包括保证其间的速度同步或具有一定的速比,常采用机械传动刚性联接装置来实现。
但有时若多个执行元件间的机械传动装置较大,执行元件间的距离较远时,就只得考虑采用独立控制的非刚性联接传动方法。
底下以两个例子分别介绍利用PLC和变频器实现两个电机间速度同步和保持速度间一定速比的控制方法。
一、利用PLC和变频器实现速度同步控制薄膜吹塑及印刷机组的主要功能是,利用挤出吹塑的方法进行分子化合物塑料薄膜的加工,然后经过凹版印刷机实现对薄膜的印刷,印刷工艺根据要求不同可以采用单面单色、单面多色、双面单色或双面多色等方法。
在整个机组中,有多个电机的速度需要进行控制,如挤出主驱动电机、薄膜拉伸牵引电机、印刷电机和成品卷绕电机等。
电机间的速度有一定的关系,如:挤出主电机的速度由生产量要求确定,但该速度确定然后,根据薄膜厚度,相应的牵引速度也就确定,是以挤出速度和牵引速度之间有一确定的关系;同时,多组印刷胶辘必须保证同步,印刷电机和牵引电机速度也必须保持同步,不然,将影响薄膜的质量、印刷效果和生产的连续性;卷绕电机的速度受印刷速度的限制,作相应变化,以保证经过印刷的薄膜能以恒定的拉力进行卷绕。
在上述机组的传动系统中,多组印刷胶辘的同步驱动可利用刚性的机械轴联接,整个印刷胶辘的驱动由一台电机驱动,如许就保证了它们之间的同步。
印刷电机的速度必须保证与牵引电机的速度同步,不然,在此两道工艺之间薄膜会出现过紧或过松的现象,影响印刷质量和生产的连续性。
但是印刷生置与牵引装置相距甚远,没有办法采用机械刚性联接的方法。
为实现牵引与印刷间的同步控制,牵引电机和印刷电机各采用变频器进行调速,再用PLC对两台变频器直接控制。
牵引电机和印刷电机采用变频调速,其控制框图如图1所示。
在这个闭环控制中,以牵引辘的速度为目标,由印刷电机变频器调节印刷辘速度来跟踪牵引辘的速度。
双电机交叉耦合同步控制原理
双电机交叉耦合同步控制原理The principle of cross-coupled synchronous control of dual motors is a technique used in various applications, such as robotics and industrial automation, to achieve precise and coordinated movement of multiple motors. This control method involves the interconnection of two motorsin a way that enables them to work together in a synchronized manner, even when subjected to disturbances or variations in load.One of the main advantages of cross-coupled synchronous control is its ability to improve the overall performance and accuracy of motion control systems. By coupling the two motors together, any disturbances or variations in load affecting one motor can be compensated by the other motor. This results in enhanced stability and reduced tracking errors, especially in high-precision applications.From a technical perspective, the cross-coupled synchronous control principle involves the use of feedbackcontrol loops to monitor and adjust the position, velocity, and torque of each motor. These control loops continuously compare the desired motion trajectory with the actual motion of the motors and generate control signals accordingly. By cross-coupling the control loops of the two motors, any discrepancies between their motions can be corrected in real-time.To implement cross-coupled synchronous control, it is crucial to have accurate and reliable position feedback from each motor. This can be achieved using various sensing technologies, such as encoders or resolvers, which provide precise information about the motor's position. Additionally, the control algorithms used in this technique should be capable of handling the interconnection between the motors and adjusting the control signals accordingly.Furthermore, the success of cross-coupled synchronous control heavily relies on the mechanical design and characteristics of the system. The motors should have similar dynamic response characteristics, such as torque-speed curves, to ensure effective coupling. Mechanicalbacklash and compliance should also be minimized to prevent unwanted vibrations or oscillations in the system.In terms of applications, the cross-coupled synchronous control principle finds extensive use in robotics, where precise and coordinated motion of multiple joints or limbs is required. For example, in a humanoid robot, the movements of its arms and legs can be controlled using this technique to achieve smooth and natural motions. Similarly, in CNC machines or industrial manipulators, cross-coupled synchronous control enables accurate and synchronized movement of multiple axes.In conclusion, the principle of cross-coupled synchronous control of dual motors is a powerful technique that enhances the performance and accuracy of motioncontrol systems. By interconnecting the control loops of two motors, disturbances or variations in load affecting one motor can be compensated by the other, resulting in improved stability and reduced tracking errors. Accurate position feedback, suitable control algorithms, and proper mechanical design are essential for successfulimplementation. This technique finds widespread applications in robotics and industrial automation, enabling precise and coordinated movement of multiple motors.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 变频器-电动机的数学模型
根据文献[ 12] 提出的 IIM( Idealized Induct ion Mo-
tor) 模型, 异步电机转子的运动方程可表示为
J X#= K m ( X0 - X) - Ml
( 1)
式中, J 为转子转动惯量; Ml 为转子阻力矩; X 为转
子的角速度; X0 为电机的理想空载角速度( X0= 2PP@
2 0 05 年 7 月 第12卷第4期
控制工程 Control Engineering of China
Jul . 2 0 0 5 Vol. 12, No. 4
文章编号: 1671- 7848( 2005) 04- 0398- 03
双电机传动机械系统的同步控制
卢金铎, 刘锦波
( 山东大学 控制科学与工程学院, 山东 济南 250061)
3 非线性同步控制规律及其实现
双轴控制系统的结构如图 1 所示。
图 1 同步 控制结构图
设
xi1d (
t ) 为系统的参考输入,
x# i 1d
(
t) ,
x&i 1d
(
t)
为
其一阶、二阶导数,
x
i 1
(
t)
为实际输出位置;
i=
1, 2,
分别代表 X , Y 轴。
定义:
E x#1i d ( t ) -
g1 ( xi1 ( t ) - xi1d (
控制工程
第 12 卷
y 1d ( t ) = ( 1- sint ) sint , t I [ 0, 2P] } ( 16)
仿真结果分别如图 2~ 5 所示。图 2~ 4 中, 曲 ( 15) 线 1 为实际轮廓线, 曲线 2 为参考轮廓线。图 5 中,
实线 1, 2 分别为 X , Y 轴实际跟踪信号, 虚线 3, 4 分 别为 X , Y 参考信号, 点线 5, 6 分别为加在 X , Y 轴 上的扰动信号。
1引言
近年来, 随着各种机械性能和产品质量的逐渐 提高, 仅针对一台电机的控制已经无法满足现代高 科技发展的要求, 需要同时使用多个伺服电机。当 各伺服电机之间存在速度、位置等约束时, 就需要 采取适当的控制策略对各电机 的运转进行协 调控 制。自从 1980 年 Koren 提出交 叉耦合控制器[ 1] 以 后, 许多科学工作者围绕多机协调控制理论展开了 进一步的研究, 已经深入到速度和转角( 位置) 双重 同步的多电机协调控制。Kulkarni 和 Srinivasan[ 2, 3] 详
设 x 1d ( t ) , y 1d ( t ) 为给定的关于时间的函数, 且
其具有二阶导数; 下面设计控制规律 u1, u2, 使得系
统输 出 位 置 信 号 x 1 ( t ) , y 1 ( t ) 在 同 一 时 刻 0 [ t * < ] 开始 跟踪参 考输入 x 1d ( t ) , y 1d ( t ) , 当 t > t * 时, 有 x 1 ( t ) = x 1d ( t ) , y 1 ( t ) = y 1d ( t ) 。
由式( 9) 得:
x# i 2d
(
t)
=
x&i 1d
(
t)
-
g1 Ei( t)
E2
(
e
i 1
(t))2 Nhomakorabea3P2
i= 1
当 xi1 ( 0) - xi1d ( 0) X 0
( 10)
x&i 1d
(
t)
当 xi1 ( t ) - xi1d ( t ) = 0( t \0)
这里:
E1( t) : =
e
2 1
摘
要: 针对多电机同步控制研究的 现状, 用基 于位置 和速度 的非线性 同步控 制规律 设
计双电机传动机械系统控制器, 实现两组 变频器- 电 动机机 械系统 的同步控 制。Matlab 环境 下
的仿真结果表明, 系统具有良好的性能, 能够 在有限 的时间 内实现 对输入信 号的同 步无差 跟
踪, 即使轮廓线是存在突变尖角的心形线, 整 个系统 的运动 轨迹也 能够按照 期望的 轮廓线 运
2
( ei1 ( t ) ) 2
t) )
1P2
i= 1
x
i 2d
(
t)
:
=
当
x
i 1
(
0)
-
x
i 1d
(
0)
X0
( 9)
x#1i d ( t )
当
x
i 1
(
t)
-
x
i 1d
(
t)
=
0( t \0)
增益 g1>
0; 当 t \0 时,
e
1 1
(
t)
:
=
x1( t) -
x 1d
( t ) , e21 ( t ) : = y1 ( t ) - y1 d ( t ) 。
细分析了交叉耦合补偿控制策略, 并于 1989 年提出 了最优控制方案[ 4] ; Tomizuka 等[5] 又将自适 应前馈 控制用于交叉耦合控制器中, 以提高瞬间响应和抗 干扰能力; Koren 和 Lo( 1991, 1992) 针对一般性的轨 迹曲线提出了变增益交叉耦合控制[6] ; 近年来, 又有 许多科学工作者把鲁棒控制[ 7] 、变结构控制[8] 、模型 参考自适应控制[ 9] 、神经网络与遗传算法[ 10] 大批的
将式( 4) 代入式( 3) , 得:
J X#- Km X= Ku- Ml
( 5)
式中, K = K mKfK b 。
令 a = KmPJ , b = KPJ , d = - MlPJ , 式( 5) 可以
写成:
X# + aX= bu + d
( 6)
由此可以得到 X , Y 轴以速度和加速度为状态
变量的状态方程:
制系统的响应比电动机的电磁瞬变过程和转子的动
态过程快得多。 » 不考虑磁场减弱问题。
令 Kf = 2PPP , 则式( 1) 可以写成:
J X# = Km ( Kf f - X) - Ml
( 3)
变频器可以简化为一比例环节, 即:
f = K bu
( 4)
式中, Kb 为比例系数; u 为变频器控制端电压。
第 4期
卢金铎等: 双电机传动机械系统的同步控制
# 399 #
式中, Lm = amL12 ; am 为任意常数; L12 为定子与转子
之间的互感; S0 = LmPr 2 ; r 2 为转子绕组电阻; im 为
等效励磁电流。
这里 Km 为常数, 其原因是: ¹ 对于 VPf 控制, im 2 保持常 值。 º 假 设控
(
t)
(
e
2 1
(
t)
e#11 (
t)
-
e#21 ( t ) e11 ( t ) )
E2( t) : =
e
1 1
(
t)
(
e
1 1
(
t)
e#21 (
t)
-
e#11 ( t ) e21 ( t ) )
( 11)
式中,
当
t
\0
时,
e#
1 1
(
t
)
=
x2( t) -
x# 1d ( t ) , e#21 ( t ) =
x#1 ( t ) = x 2 ( t )
x 1 ( 0) = x 10
x#2 ( t ) = - a1 x 1 ( t ) + b1 u1 + d1 x 2 ( 0) = x 20 ( 7)
y#1 ( t ) = y 2 ( t )
y 1 ( 0) = y 10
y#2 ( t ) = - a2 y 1 ( t ) + b2 u2 + d2 y 2 ( 0) = y 20 ( 8)
跟踪曲线分如下 3 种情况进行讨论:
¹ 直线 L = { ( x 1d ( t ) , y 1d ( t ) ) I R2 :
x 1d ( t ) = sint ,
y 1d ( t ) = sint , t I [ 0, P] }
( 14)
º 半径为 1 的圆
# 400 #
L = { ( x 1d ( t ) , y 1d ( t ) ) I R2 : x 1d ( t ) = sint , y 1d ( t ) = cost , t I [ 0, 2P] } » 心形线 H = { ( x 1d ( t ) , y 1d ( t ) ) I R2 : x 1d ( t ) = ( 1- sint ) cost ,
现代控制理论 的控制方法应用到多电 机协调控制 中, 取得了很好的效果。
本文采用 Pradeep 和 Shahruz 提出的一种非线性 同步控制规律[ 11] , 以两组变频器- 电动机 X , Y 为控 制对象, 设计双轴同步控制系统。仿真结果表明, 这 种方法设计的控制器简单易行, 不仅能够实现对给 定信号的同步无差跟踪, 而且对于外部的干扰具有 很强的鲁棒性。
u2 = y 3d ( t )
几点说明: ( i) 非线性输入 u1 , u2 有界; ( ii) 开始 跟踪时刻 t * 与 g1 , g2 的取值相关; ( iii) 当 g2 > g 1
时, 系统的性能较好。
4 仿真实例
取扰动为三角函数输入, 频率为输入的 3 倍, 选 取 g1 = 015, g2 = 30, 选取电机的参数: a= b = 10[ 13] 。
LU Jin-duo, LIU Jin-bo