位置度公差及其计算89840
位置度计算公式
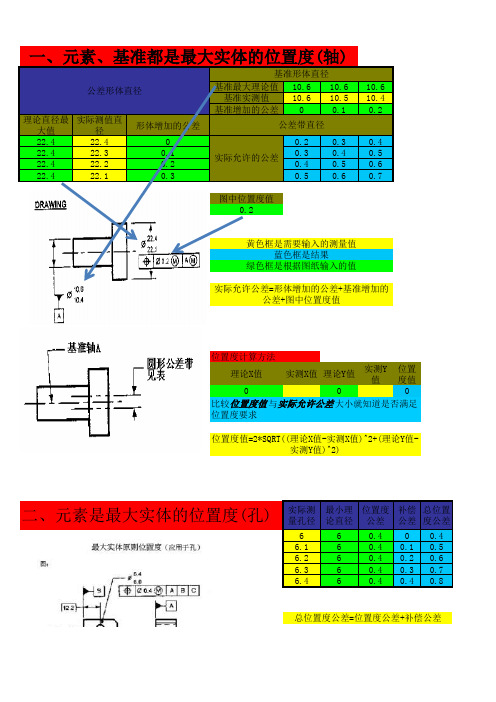
基准最大理论值10.610.610.6基准实测值10.610.510.4基准增加的公差00.10.2理论直径最大值实际测值直径形体增加的公差22.422.400.20.30.422.422.30.10.30.40.522.422.20.20.40.50.622.422.10.30.50.60.7图中位置度值0.2理论X值实测X值理论Y值实测Y 值位置度值000实际测量孔径最小理论直径位置度公差补偿公差总位置度公差660.400.46.160.40.10.56.260.40.20.66.360.40.30.76.460.40.40.8一、元素、基准都是最大实体的位置度(轴)基准形体直径公差形体直径公差带直径实际允许的公差位置度计算方法实际允许公差=形体增加的公差+基准增加的公差+图中位置度值位置度值=2*SQRT((理论X值-实测X值)^2+(理论Y值-实测Y值)^2)总位置度公差=位置度公差+补偿公差黄色框是需要输入的测量值蓝色框是结果绿色框是根据图纸输入的值比较位置度值与实际允许公差大小就知道是否满足位置度要求二、元素是最大实体的位置度(孔)位置度值=2*SQRT((理论X值-实测X 值)^2+(理论Y值-实测Y值)^2)位置度值=2*SQRT((理论X值-实测X 值)^2+(理论Y值-实测Y值)^2)总位置度公差=位置度公差+补偿公差基准最小理论值18.118.118.1基准实测值18.218.1518.1基准增加的公差0.10.05理论直径最小值实际测值直径形体增加的公差2525.050.050.350.30.252525.040.040.340.290.242525.020.020.320.270.2225250.30.250.2图中位置度值0.2理论X值实测X值理论Y值实测Y 值位置度值000位置度值=2*SQRT((理论X值-实测X值)^2+(理论Y值-实测Y值)^2)实际允许公差=形体增加的公差+基准增加的公差+图中位置度值位置度计算方法比较位置度值与实际允许公差大小就知道是否满足实际允许的公差公差带直径公差形体直径基准形体直径四、元素、基准都是最大实体的位置度(孔)孔类与轴类的最大最小实体增加的公差区别:轴:最大理论直径-测量直径孔:测量直径-最小理论直径。
位置度公差

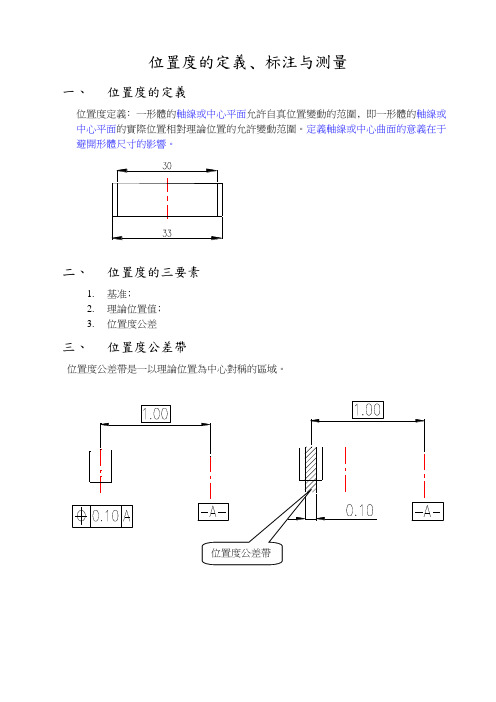
位置度公差位置度公差是现代工程设计和制造中一个非常重要的概念,它在确保零件装配质量和功能性方面起着关键作用。
位置度公差是指零件几何尺寸与指定位置之间的偏差允许范围,它在工程图纸中通常用符号ε表示。
通过合理地设置位置度公差,可以确保零件的装配精度和性能,避免因为工艺、材料等因素导致的不良影响。
位置度公差的重要性位置度公差在工程设计和制造中的重要性不可忽视。
它可以有效控制零件在装配时的位置偏差,确保零件之间的相对位置关系达到设计要求。
通过合理设置位置度公差,可以有效降低零件装配过程中的损耗和失败率,提高产品的稳定性和可靠性。
同时,位置度公差还可以帮助设计者合理选择加工工艺和工艺参数,提高生产效率,降低成本。
位置度公差的确定确定位置度公差需要考虑多个因素,包括零件的功能要求、装配方式、使用环境和制造工艺等。
通常情况下,位置度公差的确定应遵循以下原则:1.根据零件的功能要求确定位置度公差的总体策略,包括使用最大材料原则、功能定位原则等。
2.结合零件的装配方式和使用环境,确定不同特征的位置度公差要求,包括基准特征、核心特征等。
3.考虑零件的制造工艺,合理设置位置度公差的数值范围,确保在实际生产中可实现。
4.在确定位置度公差时应考虑到零件装配的方便性和稳定性,避免过度精度导致装配困难。
位置度公差的应用位置度公差在实际工程设计和制造中有着广泛的应用。
在设计阶段,设计师通过合理设置位置度公差,确保零件在装配时位置偏差在允许范围内,满足产品功能和性能要求。
在制造阶段,操作人员根据工程图纸上的位置度公差要求选择合适的加工工艺和工艺参数,保证零件加工精度符合要求。
结语位置度公差作为工程设计和制造中的一个重要概念,对产品的质量和性能起着至关重要的作用。
合理设置位置度公差,能够有效控制零件在装配时的位置偏差,提高产品的装配精度和稳定性。
设计者和制造者应该充分理解位置度公差的意义和应用,确保产品质量和性能达到设计要求,满足用户需求。
让你更容易理解的位置度公差
2021/3/27
CHENLI
2
2021/3/27
CHENLI
3
2021/3/27
CHENLI
4
2021/3/27
CHENLI
5
2021/3/27
CHENLI
6
2021/3/27
CHENLI
7
二、位置度公差的标注
• 单个要素在零件上的定位要求,可以根据基准体系和理论 正确尺寸确定的理想位置标注位置度公差来实现。
• 图6-12所示的滤油网盖上四孔组内四个孔的轴线应垂直于基准端面A, 因为装配时该端面与箱体上相应的端面贴合。但不要求四个孔的几何 图框的轴线与滤油网盖外圆柱面或内孔的轴线重合。
2021/3/27
CHENLI
19
③复合位置度公差注 法:图6-13。
• 四个孔的实际轴线应同时位 于孔组位置度公差带和各孔 位置度公差带内,即四个孔 的实际轴线应位于两个公差 带的重叠部分,但各孔位置 度公差带中心不必位于孔组 位置度公差带内,则满足设 计要求。
2021/3/27
CHENLI
16
二、位置度公差的标注
• (2)圆周布置孔组。 • ①基准孔尺寸公差与被测孔位置度公差的关系采用最大实
体要求:图6-10。 • ②不规定孔组在零件上的确定位置:图6-11、6-12。
2021/3/27
CHENLI
Hale Waihona Puke 172021/3/27
CHENLI
18
• 图6-11所示的爪形扳手上的四销组内四个销只要求能够分别插入螺纹 堵盖上的四孔组内四个孔中,可以施力,但不要求它们的端面贴合。 因此,不要求四个销的轴线垂直于扳手端面,也不要求四个销的几何 图框的轴线与扳手外圆柱面或内孔的轴线同轴线。
位置度公差测量方法
1.基准﹔2.理論位置值﹔3.位置度公差三、位置度公差帶四、位置度的標注與測量方法3﹑以中心线左边第二根端子为例﹐测出实际尺寸D1(0.82)﹑D2(1.02)﹐根据位置度公差定义﹐DE=abs(Da-Dt)=abs{(D1+D2)/2-Dt)}=abs[(0.85+1.00)/2-0.90}]=0.025<0.05其中﹐DE表示实际偏差abs表示绝对值Da表示实际位置尺寸Dt表示理论位置尺寸﹐对于不同的端子﹐它们的理论位置尺寸是不同的﹐测量时测量者须自行计算﹐因为下面这种方法多了一次置中归零﹐置中归零不仅测量繁琐﹐而且会增加测量误差。
DE=abs(Da-Dt)=abs{(D1+D2)/2-Dt)}= abs{[(d1+ Dt) +( Dt-d2)]/2-Dt)}=abs[(d1-d2)/2]=abs[(0.12-0.08)/2]=0.02<0.05四﹑制作位置度公差表PIN BASE D1 D2 Da=(D1+D2)/2 Dt DE 判定12345(二)﹑IDE 44P垂直位置度的标注与测量如图﹐IDE 44P端子在垂直方向上具有以下特点﹕排数少(只有两排)﹐每排端子数量多(达22PIN)﹐长度值为端子材厚值﹐对于不同的端子﹐其值差异极小﹐因此我们可把上排端子和下排端子分别看成两个整体。
下面以下排端子为例介绍其测量方法。
一、测出角柱垂直方向上Φ1.70的实际尺寸﹐然后置中归零﹔二、往下偏移2.00﹐然后归零﹔三、分别找出位置向上和向下偏离最大的端子﹐测出其端子上下表面的距离﹐并测出端子实际材厚值﹕DE1=d1-T/2=0.15-0.20/2=0.05DE2=d2-T/2=0.17-0.20/2=0.07下排端子的位置度最大偏差为﹕max(DE1﹐DE2)=0.07<0.10为基准﹐用于控制端子锡脚与与PCB板的配合﹐现其位置度公差0.18﹔另一个是端子接触区域的位置度﹐此位置度以KEY为基准﹐用于控制端子接触区域与对插件的配合﹐现其位置度公差0.3。
位置度公差详解

位置度實例:sheet film
如何測量位置度 (5 of 5 pages)
A=11.54-11.50=0.04
11.54
B
C
11.50 =實際的測量結果
A
C=SQRT((A=0.04)^2+(B=0.05)^2)=0.064
<
=GD=C*2=0.064*2=0.128 0.128 = OK 0.2
如何用Werth自動影像測量儀計算位置度 3: 按圖紙將被測孔的實際幾何中心 測量.
4: 以手動輸入的方式將被測孔的理 論位置作出來(即在以理論的坐標 作圓).
理論圓(心)位置
實際的幾何中心 基準 A
實際的幾何位置
如何計算測量後其位置度公差的結果
基準 A
位置度的求法(一):
如何用Werth自動影像測量儀計算位置度 1: 以基位A,B孔連線建成Y軸,并將A孔 圓心定義為坐標原點.
2: 以A點為原點,使Y軸反時針方向 旋轉 28.16°,并設定為新的Y軸.
坐標點 point A
位置度的求法(一):
11.54
如何測量位置度 (3 of 5 pages)
6.92
Not OK
ø0.2
實際的幾何中心
基準 A
位置度實例:sheet film
如何測量位置度 (4 of 5 pages)
如何計算測量後其位置度公差的結果:
目標位置
實際位置
=位置度
B A
B=6.97-6.92=0.05
6.92 6.97 =實際的測量結果
1: 以基位A,B孔連線建成時針方向 旋轉 28.16°,并設定為新的Y軸.
坐標點 point A
位置度實例:sheet film
位置度的计算公式

位置度的计算公式
位置度是一个用于描述零件几何特征的概念,它可以用来评估零件与设计要求之间的偏差程度。
位置度的计算公式如下:位置度=|L1-L2|
其中,L1为设计要求中的理论位置,L2为测量结果中实际位置。
位置度的大小取决于L1和L2之间的差距,如果差距越小,位置度就越小,说明零件的几何特征与设计要求越接近。
反之,如果差距越大,位置度就越大,说明零件的几何特征与设计要求越远离。
因此,位置度的计算公式可以帮助工程师评估零件的质量,并提供改进设计或生产流程的依据。
- 1 -。
位置度计算
陈一士
一
概述
机械零件装配在一起最为常用的有如下两种连接: 1)以活动紧固件(或轴)通过被装配零件上的光孔进行连接,这种方 式最常用的如螺栓(两个零件均为光孔)连接。
图 1
2)以固定紧固件(或轴)牢固地连接在一个零件上,且通过另一零 件上的光孔进行连接,这种方式最常用的如螺钉(一零件为光孔、 一零件为螺孔)连接。
同轴件(活动紧固件连接)
Ø 10 H9
Ø T1 M
+ 0.043 0
件1 A
Ø 10 d9
Ø T2 M
- 0.040 - 0.076
件2 A
A M
A M
Ø 20 H9
+ 0.052 0
E
Ø 20 e9
- 0.040 - 0.076
E
图 10
计算: 由式 (7) 得
H1+ H2 = F1 + F2 + T1 + T2 T1 + T2 = 20 + 10 -19.96 – 9.96 = 0.08
图 2
在这些连接中,常用位置度度公差控制连接孔距的变化。当实 际要素处于最大实体状态(MMC),其轴线或中心面又处在位置度 公差带的极限位置,此时装配最为不利。以此作为计算依据,则其 它零件合格的场合则都能自由装配。
二
A)“活动”紧固件连 接
H C min Ø T/2 T/2 F H/2 F/2 ØT
综合
2 – M4X12
Ø T1 M
底座 A
Ø 4.2
+ 0.2 0
盖板
2 – Ø 4.2 Ø 4.2
+ 0.2 0
A-A
A
位置度公差值计算示例
因螺栓不遵守包容要 求,遵守最大实体要 求,尺寸为MMVS = MMS + T ,而不是 MMS。
螺栓的MMVS(最大实体实效尺寸) MMVS = MD(螺纹外径)+ T (螺杆轴线直线度)
而MD = 中径 + 2x(3/8)H, H = 0.866025404 P, P – 螺距。 设:M10(P = 1.25 ) 则:MD (螺纹外径) = 9.99989881625 ≈ 10 。
0.2垂直A、定位B(与B为正确理论尺寸),可在0.8内沿C左右平动。
效果不一样
复合轮廓度标注
2.5 A B C 0.5
对基准A、B和C的位置和方向要求
仅对形状要求 0.5可在2.5内沿水平方向平动、摆 动;垂直方向摆动
独立轮廓度标注
=
2.5 A B C
0.5
对基准A、B和C的位置和方向要求
仅对形状要求
用式 (1):T2 = H - F = 4.2 - 4 = 0.2 ; 取0.15。 (3)求 T3
解:为活动紧固件连接
用式 (1):T3 = H - F = 7.8 x 2 - 15 = 0.6 ; 取0.5。 (4)求 ± ΔL
解:因为允差为1
所以 ± ΔL = ± 1/2 = ± 0.5 。
A-A
MMVS = 10 + 0.125 = 125。
可见某一直径螺栓的MMVS大小与其长度与公差等级有关。
2.2 活动紧固件连接
计算时紧固件(轴)仍取最大实体尺寸MMS。
C min Ø T/2 T/2
H F H/2
F/2 ØT
T/2
设: H – 光孔的MMS(MMC) F – 紧固件(轴)的MMS (MMC) Ø T – 公差带大小 Cmin – 孔与轴的最小间隙
螺栓螺钉连接位置度公差计算
螺栓、螺钉连接位置度公差计算
一、螺栓连接的计算公式
用螺栓连接丙个或两个以上的零件,且被连接零件均为光孔,其计算计算公式为:
T≤KZ
Z=D MIN-d MAX
T——位置度公差值
Z——孔与紧固件之间的间隙
D MIN——最小孔径
d MAX——螺栓或螺钉的最大直径
K——间隙利用系数
推荐值:不需调整的固定连接K=1
需调整的固定连接K=0.8或0.6
若考虑结构、加工等因素,被连接零件采用不相等的位置度公差T a 、T b时,则必须满足:T a+T b≤2T
二、螺钉连接的计算公式
被螺钉连接的零件中有一个是螺孔(或其它不带间隙的过盈配合孔).而其它均为光孔,其计算公式为:
T≤0.5KZ
Z=D MIN-d MAX
若考虑结构、加工等因素,被连接零件采用不相等的位置度公差T a 、T b时,螺孔(或过盈配合孔)与任一零件的位置度公差的组合必须满足:
T a+T b≤2T
注:圆整后取标准公差值
摘自机械工业出版社《机械工业最新基础标准应用手册》1988年出版。
位置度计算.
二板件各4个光孔用4个M4螺栓连接(活动紧固件连接)
ØT 0.5 M M Ø
图 9
若上例中光孔尺寸为 Ø 4 B11 求:T1、T2 ?
+ 0.215 + 0.140
[ MMS(H)= 4 .14 ]
计算: A)由式 (2):H = F +(T1+T2)/2 4.14 = 4 +(T1+T2)/2 则: T1+ T2 = 0.28 , T1 = T2 = 0.14 。 B)由式 (1):T = H – F = 4.14 - 4 = 0.14。 若上例中已知位置度公差都为Ø0.5 求:光孔H的MMS尺寸 ? 计算: A)由式 (2):H = F +(T1+T2)/2 = 4 +(0.51+ 0.5)/2 则: H = 4.5 。 B)由式 (1):H = F + T = 4 + 0.5 = 4.5 。
图 6
4
B)“固定”紧固件连接
H
F
ØT
图 7
设: H – 光孔的MMS F – 紧固件(轴)的MMS T – 公差带大小 C min – 孔与轴的最小间隙 则: F/2 = H/2 – T F = H – 2T T =(H – F)/2 = C min/2 …(5)
公式的讨论: T1 ≠ T2 ≠ T 则: F = H -(T1 +T2 )
+ 0.12 0
件1
4 - Ø 3.5
0 - 0.12
件2
ØT1 M
ØT2 M
图 12
计算: A)由式 (6) 得: H = F + T1 + T2, 4 = 3.5 + T1+T2 则: T1+T2 = 0.5 如: T1 = T2 = 0.25 或 T1 = 0.2, T2 = 0.3 等。 B)由式 (5) 得:T =(H - F)/2 =(4 – 3.5)/2 = 0.25
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位置度公差及其计算89840
• 2.孔组位置度公差的基本标注方法 满足第一种设计要求的位置度公差注法 • (1)矩形布置孔组。图6-6。
位置度公差及其计算89840
• (2)圆周布置孔组。图6-5。
位置度公差及其计算89840
• 2.孔组位置度公差的基本标注方法 满足第二种设计要求的位置度公差注法 • (1)矩形布置孔组。 • ①复合位置度公差注法:指将孔组的两种位置度公差分别
位置度公差及其计算89840
• 1. 孔组内各孔位置度公差的计算 • 孔组内各孔的位置度公差带计算公式由紧固件与被连接零
件的连接方式决定。 • 通孔连接方式:用螺栓、销钉等紧固件穿过两个或几个被
连接零件上的通孔; • 螺孔连接方式:把双头螺柱、螺钉等紧固件拧入一个被连
接零件的螺孔中,且穿过其余的被连接零件上的通孔。 • (1)通孔连接方式的位置度公差计算(图6-14)
• 孔组应平行于一个侧面的注法,见图6-9。
位置度公差及其计算89840
• (2)圆周布置孔组。 • ①基准孔尺寸公差与被测孔位置度公差的关系采用最大实
体要求:图6-10。 • ②不规定孔组在零件上的确定位置:图6-11、6-12。
• 图6-11所示的爪形扳手上的四销组内四个销只要求能够分别插入螺纹 堵盖上的四孔组内四个孔中,可以施力,但不要求它们的端面贴合。 因此,不要求四个销的轴线垂直于扳手端面,也不要求四个销的几何 图框的轴线与扳手外圆柱面或内孔的轴线同轴线。
• 孔组位置度公差带与各孔位置度公差带重合,几何图框轴线对基准轴 线的允许变动量δl等于各孔位置度公差值t1 与该孔直径的尺寸公差值T 之和。
• δl=t1+T
• 满足第二种设计要求:(图6-10)
• 图6-10(a),各被测孔的轴线对
基准轴线的允许变动量:
δl=t1+T+T1 t1和T——被测孔的位置度公差值和
度公差值相同,而通孔的位置度公差采用最大实体要求, 螺孔的位置度公差不采用最大实体要求,而采用独立原则。
t=(DM-dM)/2=0.5Xmin • 上式中,紧固件采用包容要求
பைடு நூலகம் 位置度公差及其计算89840
• 2. 孔组位置度公差的计算 • (1)矩形零件(基准要素为平面要素) • 满足第一种设计要求:只需计算各孔位置度公差值t1,不
位置度公差及其计算89840
• 单个要素在零件上的定位要求,可以根据基准体系和理论 正确尺寸确定的理想位置标注位置度公差来实现。
• 要素组在零件上的定位,要考虑该要素组的两种位置关系 和两种设计要求。
• 1.孔组位置度公差标注应包含的两项主要内容 孔组的两种位置关系 • (1)孔组内各孔的位置关系。是指几何图框上各孔理想
• 图6-12所示的滤油网盖上四孔组内四个孔的轴线应垂直于基准端面A, 因为装配时该端面与箱体上相应的端面贴合。但不要求四个孔的几何 图框的轴线与滤油网盖外圆柱面或内孔的轴线重合。
位置度公差及其计算 89840
• 四个孔的实际轴线应同时位 于孔组位置度公差带和各孔 位置度公差带内,即四个孔 的实际轴线应位于两个公差 带的重叠部分,但各孔位置 度公差带中心不必位于孔组 位置度公差带内,则满足设 计要求。
必计算孔组位置度公差值t2,因为它们相等。(图6-6)
• 满足第二种设计要求:(图6-7和图6-4)
• t2=δl-T δl为孔的轴线至零件有关侧面的距离的允许变动量,T为通孔 直径的尺寸公差值
• 定位尺寸公差值:T 1=T2=δl
• (2)圆盘形零件(基准要素为轴线)
• 满足第一种设计要求:(图6-5)
t=DM-dM=Xmin • 上式中,紧固件采用包容要求
• 一般情况,各零件上通孔直径的基本尺寸和极限偏差都相同,其轴 线的位置度公差值也相同,且采用最大实体要求,通孔的形状误差 由最大实体实效边界控制。
位置度公差及其计算89840
• (2)螺孔连接方式的位置度公差计算(图6-15) • 一般情况下,螺孔(包括过盈配合销钉孔)和通孔的位置
尺寸公差值;
T1——基准孔的尺寸公差值 • 图6-10(b),各被测孔的轴线对
基准轴线的允许变动量:
δl=t1+T+T1+t3 t1和T——被测孔的位置度公差值和
尺寸公差值;
T1和t3——基准孔的尺寸公差值和垂 直度公差值
位置度公差及其计算89840
• 装配时,如果设计要求各个被连接零件上孔组内各孔分别 对准,但不要求这些零件的外圆柱面或内孔的基准轴线彼 此重合,则可采用图6-11、图6-12或6-13所示注法。
用两个公差框格注出。图6-7。
孔组位置度公差 各孔位置度公差
位置度公差及其计算89840
• ②位置度公差与定位尺寸公差组合注法:图6-4和6-8。
➢ 四个孔的实际轴线必 须位于Φt1位置度公差 带内,且I、II、III孔 的实际轴线还必须位 于相应的定位尺寸公 差带内,才能满足设 计要求。
位置度公差及其计算89840
位置度公差及其计算89840
位置度公差及其计算89840
• 在几何精度设计中,确定中心距是一个重要的方 面。
• 坐标尺寸注法存在着以下缺点: • 1.加工时产生累积误差; • 2.用两点法测量各个中心距不能保证坐标方向。 • 位置度公差注法建立在由理论正确尺寸和几何图框给出的
理想位置上。见图6-1到6-5。
位置之间的关系,各孔之间保持定的坐标位置关系和几何 关系。(各孔位置度公差) • (2)孔组对零件上其他要素的位置关系。是指孔组或孔 组内各孔在零件上的定位要求。(孔组位置度公差)
位置度公差及其计算89840
孔组的两种设计要求 • (1)第一种设计要求。装配时不仅要求被连接的两个零
件上对应孔组内各孔的位置分别对准,而且要求这两个零 件上的某些其他要素也应分别对准。(对孔组和各孔的位 置变动量都应规定较严格的位置度公差。) • (2)第二种设计要求。装配时仅要求被连接的两个零件 上对应孔组内各孔的位置分别对准,而不要求这两个零件 上的某些其他要素也分别对准。(对各孔的位置变动量应 规定较严格的位置度公差,而对孔组位置度公差或定位尺 寸公差则应规定的较松。) • 孔组位置度公差与各孔位置度公差的关系:前者一定要不 小于后者。