结构动力学中的常用数值方法(精)
结构动力学基础

m l/ 5
m l/ 5
m l/ 5
m l/ 5
0
1
2
3
4
5
l/5
0
l/5
1y = 1 1 φ1(x) 2
l/5
3
l/5
4
l/5
5
0
2 θ1 = 1 1 φ (x) 2
3
4
5
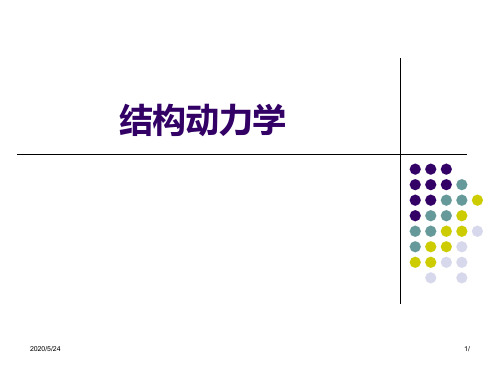
如图10-9a中,梁分为5个单元,取结点位移参数(挠度y 和转角θ)作为 广义坐标。在图10-9a中取中间四个结点的八个位移参数 y1、θ1,y2、θ2,y3、 θ3,y4、θ4 作广义坐标。
T
sin t
(10 3)
(10 4)
0 -y y T
t
y cos t
v v
y A
0
t
v
sin t
T t
0
A sin t
-A
3、结构的自振周期
由式
A
y (t ) A sin(t ) 及图,可见位移方程是一个周期函数。 2 y T 周 期: T
⑶ 是结构动力特性的重要数量标志。
泛美大厦,60层 钢结构,南北方向 的基本固有周期为 2.90秒,
大坝,400英尺高的混凝土重力坝的基 本固有周期由强迫振动试验测得在蓄水 为310英尺和345英尺十分别为0.288秒 和0.306秒,
金门大桥,金门大桥桥墩跨距1280.2米全桥总 长2737.4米的悬索桥,其横向振动的基本基本固 有周期为18.20秒,竖向振动的基本基本固有周期 为10.90秒,纵向振动的基本基本固有周期为3.81 秒,扭转振动的基本基本固有周期为4.43秒
结构动力学研究

结构动力学研究一、引言结构动力学研究是一门研究结构在外部作用下的响应行为的学科,主要研究结构的振动、动态响应、动力特性等问题。
它对于建筑物、桥梁、飞机、汽车等工程结构的设计、分析和优化具有重要意义。
本文将从动力学的基本概念入手,介绍结构动力学研究的相关内容。
二、动力学基础1. 动力学概述动力学是研究物体在外力作用下的运动规律的学科,它包括静力学和动力学两个方面。
静力学研究物体在平衡状态下的力学行为,而动力学研究物体在受到外力作用时的运动行为。
2. 振动与谐振振动是物体在固有频率下的周期性运动,谐振则是指物体在受到与其固有频率相同的外力作用下振幅不断增大的现象。
谐振现象在结构动力学中具有重要意义,需要进行合理的设计和控制,以避免结构破坏。
三、结构动力学分析方法1. 动力学方程结构动力学方程是描述结构在外力作用下的运动行为的数学模型,常用的动力学方程有牛顿第二定律方程和拉格朗日方程。
通过求解动力学方程,可以获得结构的振动响应。
2. 模态分析模态分析是结构动力学研究中常用的分析方法,它通过求解结构的特征方程和特征向量,得到结构的固有频率和振型。
模态分析可以帮助工程师了解结构的振动特性,为结构设计和优化提供依据。
3. 动力响应分析动力响应分析是研究结构在外力作用下的动态响应行为的方法。
通过施加不同的外力,可以得到结构在不同工况下的响应结果,如位移、速度、加速度等。
动力响应分析可以帮助工程师评估结构的安全性和稳定性。
四、结构动力学应用1. 地震工程地震是结构动力学研究中重要的外力作用,地震工程旨在研究结构在地震作用下的响应行为,以保证结构的安全性。
地震工程需要进行地震响应分析、地震动力试验等研究,以提高结构的抗震能力。
2. 振动控制振动控制是结构动力学研究的一个重要方向,它旨在通过合理的控制手段减小结构的振动响应。
常用的振动控制方法包括质量阻尼器、液体阻尼器、主动控制等。
振动控制技术的应用可以提高结构的舒适性和安全性。
结构动力学中的风振问题分析

结构动力学中的风振问题分析结构动力学是研究结构在外界力作用下的振动行为的学科,而风振问题则是结构动力学中一个重要的研究方向。
本文将从风振问题的背景和原因、影响因素和评估方法等方面进行详细分析和讨论。
一、背景和原因在风振问题中,结构物在大风环境下会受到风力的作用,引起结构的振动。
风振问题主要存在于高层建筑、长跨度桥梁、烟囱、塔楼等高耸结构中。
这种振动既可能是结构自身的自由振动,也可能是受到风力激励后的强迫振动。
风振问题的产生原因可以归结为以下几点:1. 气象因素:大风引起的气动力是产生风振问题的主要原因之一。
气象因素包括风速、风向、风向变化频率等。
2. 结构刚度:结构刚度的大小将直接影响结构的振动特性,而刚度小的结构更容易受到风力的激励而发生振动。
3. 结构阻尼:结构的阻尼越小,振动越容易发生和持续。
因此,结构的阻尼对于风振问题的研究具有重要意义。
4. 结构质量:结构质量的大小也将影响结构的振动特性,质量越大,振动频率越低,风振问题相对较小。
二、影响因素风振问题的复杂性决定了其受到多个因素的共同影响。
主要的影响因素包括:1. 风速和风向:风速和风向是产生风振问题的主要因素,其中风速对结构振动的影响最为显著。
2. 结构特性:结构的刚度、质量和阻尼等特性将直接影响结构的振动响应。
3. 结构形状和几何尺寸:结构的形状和几何尺寸影响着结构对风力的反应,尤其是在流体作用下的层流和湍流区域。
4. 地面效应:结构与地面之间的交互作用对风振问题也具有重要影响。
三、评估方法针对风振问题,需要进行定量的评估和分析,以寻找有效的风振控制措施。
常用的评估方法包括:1. 数值模拟:通过数值模拟方法,可以模拟结构在大风作用下的振动响应。
常用的数值方法包括有限元法、计算流体力学方法等。
2. 风洞试验:风洞试验可以模拟真实的风场环境,并通过模型的测试来评估结构的振动响应。
风洞试验是评估风振问题最为直观和准确的方法之一。
3. 实测方法:通过实际的结构振动监测数据,可以对结构的风振问题进行评估和分析。
结构动力学

第一章概述1.动力荷载类型:根据何在是否随时间变化,或随时间变化速率的不同,荷载分为静荷载和动荷载根据荷载是否已预先确定,动荷载可以分为两类:确定性(非随机)荷载和非确定性(随机)荷载。
确定性荷载是荷载随时间的变化规律已预先确定,是完全已知的时间过程;非确定性荷载是荷载随时间变化的规律预先不可以确定,是一种随机过程。
根据荷载随时间的变化规律,动荷载可以分为两类:周期荷载和非周期荷载。
根据结构对不同荷载的反应特点或采用的动力分析方法不同,周期荷载分为简谐荷载(机器转动引起的不平衡力)和非简谐周期荷载(螺旋桨产生的推力);非周期荷载分为冲击荷载(爆炸引起的冲击波)和一般任意荷载(地震引起的地震动)。
2.结构动力学与静力学的主要区别:惯性力的出现或者说考虑惯性力的影响3.结构动力学计算的特点:①动力反应要计算全部时间点上的一系列解,比静力问题复杂且要消耗更多的计算时间②于静力问题相比,由于动力反应中结构的位置随时间迅速变化,从而产生惯性力,惯性力对结构的反应又产生重要的影响4.结构离散化方法:将无限自由度问题转化为有限自由度问题集中质量法:是结构分析中最常用的处理方法,把连续分布的质量集中到质点,采用真实的物理量,具有直接直观的优点。
广义坐标法:广义坐标是形函数的幅值,有时没有明确的物理意义,但是比较方便快捷。
有限元法:综合了集中质量法与广义坐标法的特点,是广义坐标的一种特殊应用,形函数是针对整个结构定义的;有限元采用具有明确物理意义的参数作为广义坐标,形函数是定义在分片区域的。
①与广义坐标法相似,有限元法采用了形函数的概念,但不同于广义坐标法在全部体系(结构)上插值(即定义形函数),而是采用了分片的插值(即定义分片形函数),因此形函数的公式(形状)可以相对简单。
②与集中质量法相比,有限元法中的广义坐标也采用了真实的物理量,具有直接直观的优点。
5.结构的动力特性:自振频率、振型、阻尼第二章分析动力学基础及运动方程的建立1.广义坐标:能决定质点系几何位置的彼此独立的量;必须是相互独立的参数2.约束:对非自由系各质点的位置和速度所加的几何或运动学的限制;(从几何或运动学方面限制质点运动的设施)3.结构动力自由度,与静力自由度的区别:结构中质量位置、运动的描述动力自由度:结构体系在任意瞬间的一切可能的变形中,决定全部质量位置所需要的独立参数的数目静力自由度:是指确定体系在空间中的位置所需要的独立参数的数目为了数学处理上的简单,人为在建立体系的简化模型时忽略了一些对惯性影响不大的因素确定结构动力自由度的方法:外加约束固定各质点,使体系所有质点均被固定所必需的最少外加约束的数目就等于其自由度4.有势力的概念与性质:有势力(保守力):每一个力的大小和方向只决定于体系所有各质点的位置,体系从某一位置到另一位置所做的功只决定于质点的始末位置,而与各质点的运动路径无关。
常用数值计算方法简介-连续+非连续方法

四、著名有限元分析软件的应用范围
➢ UG 软件起源于美国麦道飞机公司,1991年11月并入世界上
MARC 美国 MARC 有限元 多行业通用 非线性计算 JACOBS
ADINA 美国 Bathe 有限元 多行业通用 非线性计算
FLAC
美国 Cundell 有限差分 岩土行业 前后处理麻烦、 计算收敛性好
MIDAS 韩国
有限元 土木工程 中文操作、易学
同济曙光 中国 朱合华
有限元 隧道工程 中文操作、 快速计算(二维)
三、有限元分析软件的发展( 1980~1990年)
➢1988年Flomerics公司成立,提供用于子系统内部空气流 及热传递的分析程序。 ➢1989年Engineering Software Kessemochand Development公司成立,致力于发展P法有限元程序。同时 期还有多家专业性软件公司投入专业CAE程序的开发。 ➢这一时期的CAE发展的特点:有限元分析技术在结构分析 和场分析领域获得了很大的成功,从力学模型开始拓展到各 类物理场(如温度场、磁场、声波场)的分析;从线性分析向 非线性分析(如材料为非线性、几何大变形导致的非线性、 接触行为引起的边界条件非线性等)发展,从单一场的分析 向几个场的耦合分析发展。
四、著名有限元分析软件的应用范围
➢ MSC系列工程分析软件: MSC.PATRAN:可进行静力 /动力学 / 非线性 /热分析 /复
合材料 /优化灵敏度分析等分析。 MSC.DYTRAN:求解高度非线性、瞬态动力学、动力响
结构动力学-第一章
2019/9/16
38
2019/9/16
39
2019/9/16
40
2019/9/16
41
2019/9/16
42
2019/9/16
43
三. 自由度的确定
广义坐标法:广义坐标个数即为自由度个数; 有限元法:独立结点位移数即为自由度数; 集中质量法:独立质量位移数即为自由度数;
11
l3 3EI
柔度系数
my(t) 3 EI l3y( Nhomakorabea)
P(t)
2019/9/16
柔度法步骤: 1.在质量上沿位移正向加惯性力; 2.求外力和惯性力引起的位移; 3.令该位移等于体系位移。
49
二、刚度法
P(t)
m
1
my(t)
y(t)
l EI
y
k11
k11 y(t )
k11y(t) P(t) my(t)
变分法(Hamilton原理)以及lagrange等。
我们这节课主要介绍达朗泊尔原理建立的动力学微分方程,用能量法建立 微分方程的方法在以后的章节中介绍。
达朗泊尔原理
质点系运动的任意瞬时,除了实际作用于每个质点的主动力和约束反力外, 在加上假象的惯性力,则在该瞬时质点系处于假象的平衡状态。
m P(t) my(t)
结构动力学
2019/9/16
1/
思考问题
1,结构动力学和静力学的区别和联系在哪里?
运动方程为:
m y(t) c y(t) k y(t) p(t)
静力学方程为:
k y p
201所9/9/以16 两者的区别在于:动力学问题多了惯性力项以及由运动产生的阻尼力。 2
结构动力学的刚度系数柔度系数通用课件
扭曲刚度系数计算
扭曲刚度系数定义
01
扭曲刚度系数是衡量结构在扭曲载荷下抵抗变形的能力的系数。
扭曲刚度系数的计算公式
02
扭曲刚度系数可以通过结构材料的弹性模量和截面极惯性矩计
算得出。
扭曲刚度系数的物理意义
03
扭曲刚度系数越大,表示结构在扭曲载荷下的变形越小,结构
的抗扭能力越强。
复合受力下的刚度系数计算
分析方法
通过对处理后的数据进行统计分析、曲线拟合、模式识别等,可以进一步分析结构的动力学特性,包括固有频率、 阻尼比等参数。此外,还可以通过对比不同结构的响应数据,评估不同结构的动力学性能。
实验结果及讨论
实验结果
实验测得了不同结构在不同激振条件下的响 应数据,包括加速度和位移。通过对数据进 行处理和分析,得到了不同结构的刚度系数 和柔度系数以及相关的动力学参数。
刚度系数和柔度系数是结构动力学中两个重要的概念,可以反映结构的刚度和柔度性质。
本文通过理论和实例分析,对结构动力学中的刚度系数和柔度系数进行了详细阐述,并介绍了它们在工 程实际中的应用和意义。
对未来研究的展望
随着科学技术的发展,结构动力学的研究领域将不断扩大,对刚度系数和柔度系数 的认识也将更加深入。
复合受力下的柔度系数的计算
复合受力下的柔度系数可以通过结构在复合力作用下的变形量进行计算。
03
复合受力下的柔度系数的影响因素
复合受力下的柔度系数受到材料性质、截面形状、边界条件等因素的影
响。
04
刚度系数与柔度系数的应用
在结构设计中的应用
刚度系数
在结构设计中,刚度系数是用来衡量结构抵抗变形的能力。通过计算和分析刚度 系数,可以确定结构的稳定性、承载能力和振动特性。
lammps最常用的数值方法

lammps最常用的数值方法LAMMPS最常用的数值方法引言LAMMPS(Large-scale Atomic/Molecular Massively Parallel Simulator)是一种广泛应用于分子力学模拟的开源软件。
在LAMMPS 中,数值方法是模拟的核心。
本文将详细介绍LAMMPS中最常用的数值方法。
分子力学模拟基础分子力学模拟基于牛顿力学,通过数值方法模拟原子或分子之间的相互作用。
这些相互作用力可以通过势函数表示。
以下是LAMMPS中常见的数值方法:分子动力学(Molecular Dynamics, MD)MD是一种经典的分子力学模拟方法,通过求解牛顿方程模拟粒子在力场中的运动。
MD方法具有高计算效率和适用于长时间尺度模拟等优点。
以下是LAMMPS中常用的MD方法:•Velocity-Verlet算法:Velocity-Verlet算法是MD 中最常用的积分算法之一。
它根据粒子的速度和加速度迭代更新粒子的位置和速度。
•NVE集团法:这种方法可以保证系统的粒子数(N)、体积(V)和能量(E)不变。
通过在数值积分过程中固定这些变量,可以模拟封闭系统的动力学性质。
蒙特卡罗(Monte Carlo, MC)MC方法通过随机选择和更新粒子的状态,在相空间中搜索最稳定或最佳结构。
MC方法常用于研究温度等参数对系统性质的影响。
以下是LAMMPS中常用的MC方法:•Metropolis算法:Metropolis算法是MC模拟中最常用的一种方法,通过接受或拒绝状态转移来模拟系统的平衡状态。
•其他MC算法:LAMMPS还提供了各种其他MC算法,包括重粒子MC、聚集体MC等。
束缚动力学(Brownian Dynamics, BD)BD方法模拟粒子在溶液中受到的随机力和耗散力的作用下的运动。
它常用于模拟细胞、胶体、高聚物等系统。
以下是LAMMPS中常见的BD 方法:•Langevin算法:Langevin算法模拟系统受到的随机力和耗散力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 结构动力学中的常用数值方法5.1.结构动力响应的数值算法....0()(0)(0)M x c x kx F t x a x v ⎧++=⎪⎪=⎨⎪=⎪⎩当c 为比例阻尼、线性问题→模态叠加最常用。
但当C 无法解耦,有非线性存在,有冲击作用(激起高阶模态,此时模态叠加法中的高阶模态不可以忽略)。
此时就要借助数值积分方法,在结构动力学问题中,有一类方法称为直接积分方法最为常用。
所识直接是为模态叠加法相对照来说,模态叠加法在求解之前,需要对原方程进行解耦处理,而本节的方法不用作解耦的处理,直接求解。
(由以力学,工程中的力学问题为主要研究对象的学者发展出来的)中心差分法的解题步骤1. 初始值计算(1) 形成刚度矩阵K ,质量矩阵M 和阻尼矩阵C 。
(2) 定初始值0x ,.0x ,..0x 。
(3) 选择时间步长t ∆,使它满足cr t t ∆<∆,并计算 021()a t =∆,112a t =∆,202a a = (4) 计算...00101122tx x x x a a -∆=-+(5) 形成等效质量阵01M a M a C -=+ (6) 对M -阵进行三角分解T M LDL -= 2.对每一时间步长(1) 计算时刻t 的等效载荷201()()t t t t t Q Q Ka M x a Ma C x--∆=---- (2) 求解t t +∆时刻的位移 ()Tt t t LDL x Q -+∆=(3) 如需要计算时刻t 的速度和加速度值,则.1()t t t t t x a x x +∆-∆=- ..0(2)t t t t t t x a x x x +∆-∆=-+若系统的质量矩阵和阻尼矩阵为对角阵时,则计算可进一步简化。
纽马克法的解题步骤1.初始值计算(1)形成系统刚度矩阵K ,质量矩阵M 和阻尼矩阵C (2)定初始值0x ,.0x ,..0x 。
(3)选择时间步长t ∆,参数γ、σ。
并计算积分常数0.5γ≥,20.25(0.5)δγ≥+021a t δ=∆,1a t γδ=∆,21a t δ=∆ 3112a δ=-,41a γδ=-,5(2)2t a γδ∆=- 6(1)a t γ=∆-,7a t γ=∆(4)形成等效刚度矩阵K -01K K a M a C -=++ (5)K -矩阵进行三角分解 T K L D L -=2. 对第一时间步长(1)计算t t +∆时刻的等效载荷......623145()()t t t t t t t t t Q Q M a x a x a x C a x a x a x -+∆=++++++(2)求解t t +∆时刻的位移 ()Tt t t t LDL x Q -+∆+∆=(3)计算t t +∆时刻的加速度和速度 .....023()t t t t t t t x a x x a x a x +∆+∆=--- ......67t t t t t t x x a x a x +∆+∆=++威尔逊-θ法的解题步骤1. 初始值计算(1)形成系统刚度矩阵K ,质量矩阵M 和阻尼矩阵C (2)定初始值0x ,.0x ,..0x 。
(3)选择时间步长t ∆,并计算积分常数1.4θ= 026()a t θ=∆,13a t θ=∆,212a a = 32ta θ∆=,04a a θ=,25a a θ-=631a θ=-,72t a ∆=,286t a ∆=(4)形成等效刚度K -01K K a M a C -=++(5)将等效刚度K -进行三角分解 T K L D L -=2.对每一个时间步长(1)计算t t +∆时刻的等效载荷...02()(2)t t t t t t t t t R Q Q Q M a x a x x θθ-+∆+∆=+-+++...13(2)t t t C a x x a x +++ (2)求解t t +∆时刻的位移 ()Tt t t t LDL x R θθ-+∆+∆=(3)计算在t t +∆时刻的加速度、速度和位移.....456()t t t t t t t x a x x a x a x θ+∆+∆=-++5.2 结构动力响应数值算法性能分析对公式(5.1)描述的线性系统结构动力学问题,已经有证明对整个多自由度的积分,等价于将模态分解后对单自由度的积分的结果进行模态叠加,因此可以通过对单自由度问题的分析,来说明算法的特性,其中阻尼均假设为比例阻尼,这样,模态分解后的单自由度结构动力学方程为:)(22t f x x x=++ωξω (5-29) 以下算法的性能分析,均将算法用于这个方程。
5.2.1 算法用于结构动力学方程的有限差分表示将数值计算方法应用于(5-29), 即分别在相邻的不同时刻应用算法可得如下一般形式k k k L Ay y +=+1 (5-30)A 为放大矩阵或称逼近算子,k L 为载荷逼近算子。
{}{}T m k k k k T m k k k k x x x y x x x y -+++--== ,,,,,1111例如将Newmak 方法应用于方程(5-29)有:d t A A A 1-= (5-33)⎢⎢⎣⎡+=2221γωδωh h A t ⎥⎥⎦⎤+γξωδξωh h 2122,⎢⎢⎢⎣⎡----=222)1()21(21ωγωδh h A d ⎥⎦⎤----ξωγξωδ)1(21])21(1[h h h矩阵A 的特征多项式为02)det(212=+-=--A A I A λλλ (5-34)其中A 1,A 为该矩阵的两个特征向量,分别为矩阵的迹的一半和矩阵的行列式 )(212122111A A traceA A +== (5-35)211222112det A A A A A A -== (5-36)22112,1A A A -±=λ (5-37)对Newmak 方法有:Dv A ])412()12(1[21Ω--+Ω-+=δξγ, DA ])21()22(1[22Ω+-+Ω-+=γδξγ (5-38)其中 h 为时间步长,221,Ω+Ω+==ΩδγξωD h 。
Newmak 方法放大矩阵的规模是二维的,因此特征值也只有两个,可以根据它们进行分析。
有的算法放大矩阵是三维的,例如Wilson-θ方法,在无阻尼情况下放大矩阵为: ⎢⎢⎢⎣⎡-+Ω-=Ω-22366)1(13ωθθωD A ωθθθθθΩ+-ΩΩ-Ω+h h 6)6)3(()6(22232 ⎥⎥⎥⎥⎦⎤-Ω-Ω+Ω--Ω+Ω--Ω+)636)2/336()26(2232222322232θθθθθθθθθh h (5-39) θθ)6(22+Ω=D放大矩阵A 的特征多项式为:02)det(32213=-+-=--A A A I A λλλλ (5-40)其中A 1,A 2,A 3为该矩阵的三个特征向量,分别为矩阵的迹的一半、各阶主子式的和以及矩阵的行列式,对Wilson-θ方法有⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧+ΩΩ+Ω+Ω-Ω-+-=+Ω-+Ω-Ω+Ω=+ΩΩ-Ω-Ω-Ω+-=)6(3366)6(1218634)6(233361822232222322223222222222321θθθθθθθθθθθθθθc A A c c A (5-41) 此外,在几个不同时刻应用数值算法,然后将方程中的速度和加速度项消去,可得数值算法关于位移的差分方程,例如Newmak 方法,有n n x x ])412()12(1[2)21(212Ω--+Ω-+-Ω+Ω++γδξγδγξ0])21()22(1[12=Ω+-+Ω-++-n x γδξγ (5-42)很显然,其特征方程与其放大矩阵A 的特征方程是相同的,使用关于位移的线性多步方式和放大矩阵来说明算法性能是一样的,只不过各有方便之处。
5.2.2 算法的稳定性分析设m i i 2,1,=λ为放大矩阵A 的特征值,则i λρmax =定义为A 的谱半径,若特征值互异,则1≤ρ的算法是稳定的,但若有重特征根,则要求1<ρ。
如果算法的稳定性要求对步长的选取有限制,称算法是有条件稳定的,反之为无条件稳定的。
放大矩阵的谱半径小于等于1成立的充分条件是⎪⎩⎪⎨⎧≥-≥++≥+-0102102122121A A A A A (5-43) 对33⨯的放大矩阵⎪⎪⎪⎩⎪⎪⎪⎨⎧≥-+-≥+++≥--+≥+--≥-+-0)2(10210323032302213132321321321321A A A A A A A A A A A A A A A A (5-44) 上两式是关于算法自由参数Ω,ξ的不等式,由它可以判断算法是否无条件稳定,若不是,将给出稳定条件。
例5-1分析Newmak 方法、Wilson-θ方法的稳定性 解: 将(5-38)代入(5-43)有0)21(22≥-Ω+Ωγξ01)21()2(2≤-Ω-+-Ωξγδγ显然,当2,21γδγ≥≥ (5-45)算法无条件稳定。
当2,21γδγ<≥且δγξδγγξ--+-+-=Ω≤Ω2])21(2[)21(2122c (5-46)算法稳定,但为条件稳定,其中c Ω为临界采样频率。
由于(5-43)式仅仅是充分条件,所以可进一步按照稳定性的定义得到5.1.2节叙述的无条件稳定条件。
对Wilson-θ方法,将(5-41)代入(5-44)得⎪⎪⎪⎩⎪⎪⎪⎨⎧≥-+Ω≥-+Ω-+≥-+-Ω+≥-Ω≥Ω0)312(01224)614(0)661(120)12(606242232222c c c θθθθθ (5-47) 容易看出,其中第一,二,五不等式恒成立,对第三,四不等式若希望对任意的Ω均成立,则有:⎪⎩⎪⎨⎧≥+-≥-+-01640661232θθθθ 求解上述不等式得37.1231≈+≥θ (5-48) 实际使用中通常选取θ=1.4 5.2.3 算法的相容性和收敛性直接积分算法的相容性、收敛性分析同样要使用其位移型的差分方程,或对应的单步多值形式。
在算法(5-30)式中,用精确解代替近似解,即可得到局部截断误差表达式,用符号)(k t e 表示)()()(1k k k k t he L t Ay t y ++=+ (5-49)局部截断误差表达式用放大矩阵的特征量以最常用的线性三步法为例可表示为2321/)]2()()(2)([)(h h t x A h t x A t x A h t x t e k k k k k ---+-+= (5-50)其中321,,A A A 分别为对应的33⨯的放大矩阵的三个特征向量,然后将),(h t x k - )2(h t x k -在k t 点进行泰勒展开,然后利用运动平衡方程化简即可。