基于ARM的热敏打印机系统
Arm7应用

• 存储器控制器
• • 总线仲裁 • – 处理来自ARM7和外设数据控制器的请 求 • – 3个1M 字节的片内存储区 • – 一个256M 字节的片内外设区 • • 对齐(alignment)检测 • • 重映射(Remap)命令
• – 低供耗RC 振荡器,3 到20MHz 的片上 振荡器和一个PLL • • 电源管理控制器(PMC) • – 可以通过软件进行电源优化 • – 三个可编程的外部时钟信号 • • 先进的中断控制器(AIC) • 调试单元(DBGU) • • 周期性间隔定时器(PIT) • • 时间窗看门狗(WDT) • • 实时定时器(RTT) • – 时钟来源于片内RC 振荡器
•
随着技术的发展和应用的需求,对嵌入式系统的应用要求 越来越高,传统的系统机应用和嵌入式应用的界限越来越模 糊,以51系列为主的单片机应用越来越不适应这种需求,而 以ARM为内核的32位高档单片机经过数年的发展,价格越来 越低,接近单片机的成本,而性能又高很多,有操作系统支 持,在很多领域已经取代了8位单片机的应用,这也是大势所趋。
ARM7TDMI 处理器综述
ARM7TDMI内核有两个指令集,既可以 执行高性能32位的ARM®指令集,也可 以执行16位的高代码密度Thumb®指令集, 从而可以使用户在高性能和高代码密度 之间进行平衡。基于ARMv4T 冯-诺依曼 结构的RISC 处理器,具有三级流水线, 即指令获取(F) 、解码(D)和执行(E)三个 阶段。运行速度可达55 MHz, 0.9 MIPS/MHz
常见嵌入式系统三件套:ARM 、DSP、FPGA/CPLD….Βιβλιοθήκη ARM 、DSP、FPGA对比
• ARM:是32位单片机,由于结构和计算速度的原因,主要做控制, 目前适合做事务处理或者中低端应用,从中高级工控到简单语音/ 图片(不含视频)处理 。 • DSP:它从16位~32位,内部采用哈佛结构,特别适合数据处理。 其中16位DSp适合中高级工控到简单语音/图片(不含视频)处理; 其中32位DSp适合复杂语音/图片/视频处理 ,综合速度比fpga慢 比arm快,做控制也可以大材小用,在控制方面编程难 不如arm通 用性好 • FPGA:新型FPGA可以用内部乘法器/寄存器/内存块构造软核, 例如构造ARM,则可以实现ARM的功能;若构造成DSP,则可以 实现DSP的功能。不过FPGA的功耗较大,一般情况下构造 ARM/DSP不如专用ARM/DSP方便,成本也高,但是在高速信号 处理时,可以采用并行结构,大大提高处理速度,超过目前最快 的DSP。
ARM嵌入式Web服务器Boa的软、硬件设计 毕业设计
摘要论文主要介绍了基于ARM9的嵌入式Web服务器Boa的软、硬件设计及其实现,其中硬件部分的核心是三星的S3C2410X为处理器。
最后成果形式为可以远程访问的WebServer嵌入式服务器。
Boa是一款单任务的HTTP服务器。
与其他传统的Web服务器不同的是当有连接请求到来时,它并不为每个连接单独创建进程, 也不通过复制自身进程来处理多链接。
而是通过建立HTTP请求列表来处理多路HTTP连接请求。
同时它只为CGI程序创建新的进程,这样就在最大程度上节省了系统资源,这对嵌入式系统来说至关重要。
同时它还具有自动生成目录、自动解压文件等功能。
因此, Boa在嵌入式系统中具有很高的应用价值。
关键词:ARM;Linux;嵌入式Web服务器;CGIThis paper has mainly developed the software hardware design and realization of the embedded Web server Boa based on ARM. And the core of the hardware part is S3C2410X microprocessor produced by Samsung . The final achievement is the embedded webserver which can remote visit. Boa is a single-tasking HTTP server. That means that unlike traditional webservers, it does not fork for each incoming connection, nor does it fork many copies of itself to handle multiple connections. It internally multiplexes all of the ongoing HTTP connections. And forks only for CGI programs, this is very important to embedded system. At the same time, it also has the function of automatic directory generation、automatic file gunzipping and so on. So Boa is of highly value in the embedded system application.Keywords: ARM;Linux;Embedded Web server;CGI摘要 (1)Abstract (2)目录 (3)第一章引言 (5)第二章课题背景 (6)2.1 嵌入式系统简介 (6)2.2 嵌入式系统和Linux (6)2.3 ARM9硬件平台 (7)2.3.1 ARM简介 (7)2.3.2 JXARM9-2410 ARM嵌入式教学实验系统 (8)第三章嵌入式Web服务器 (9)3.1 概述 (9)3.2 Web服务器原理 (9)3.3 嵌入式Web服务器实现原理 (9)3.3.1 TCP/IP协议 (9)3.4 嵌入式Web服务器Boa (10)3.4.1 Boa概述 (10)3.4.2 Boa的功能实现 (11)第四章CGI技术 (12)4.1 CGI概述 (12)4.2 CGI工作原理 (12)第五章建立嵌入式系统开发环境 (14)5.1 在Vmware下安装Redhat 9.0 (14)5.2 编译配置主机开发环境 (18)5.2.1 配置以太网 (18)5.2.2 安装配置tftp服务器 (19)5.2.3 配置防火墙 (21)5.2.4 配置NFS服务器 (22)5.3 JXARM9-2410中U-boot烧写 (22)5.3.1 u-boot的功能 (22)5.3.2 使用ADT IDE烧写u-boot (23)第六章系统功能的实现 (25)6.1 GCC简介 (25)6.1.1 GCC概述 (25)6.1.2 GCC基本用法 (25)6.2 Linux内核移植 (26)6.2.1 Linux内核源代码的安装 (26)6.2.2 Linux交叉编译环境的建立和使用 (27)6.2.3 Linux内核的配置和编译 (27)6.3 加载Linux内核映像 (30)6.4 Boa Web服务器的移植 (31)6.4.1 Boa Web服务器的建立 (31)6.5 Linux下动态Web页面的实现 (32)6.5.1 CGI程序分析 (32)6.5.2 Form输入的分析和解码 (34)第七章系统功能的测试 (36)7.1 测试Web服务器 (36)7.2 动态Web页面测试 (37)结束语 (40)致谢 (41)参考文献 (42)附录 (43)第一章引言随着计算机技术的发展,嵌入式系统已成为计算机领域的一格重要组成部分。
第2章 ARM体系结构

• 控制位
–
程序状态寄存器PSR(Program Status Register)的最低8位I、F、T和 M[4:0]用作控制位。当异常出现时改变控制位。处理器在特权模式 下时也可由软件改变。
• 中断禁止位 I:置1,则禁止IRQ中断; F:置1,则禁止FIQ中断。 • T位 T=0 指示ARM执行; T=1 指示Thumb执行。 • 模式控制位 M4、M3、M2、Ml和M0(M[4:0])是模式位,决定处理器 的工作模式,如表2.3.1所列。
6 (最低)
6 5
数据中止
IRQ (外部中断请求) FIQ (快速中断请求)
中止(数据)
IRQ FIQ
中止模式
IRQ FIQ
0x0000,0010
0x0000,0018 0x0000,001C
2
4 3
2.4.2 异常类型的含义
(1)复位
• • 处理器的复位电平有效时,产生复位异常 当ARM处理器或协处理器遇到不能处理的指令时,产生未定义指令异常
2.4 ARM微处理器的异常处理
• 异常:在一个正常的程序流程执行过程中,由内 部或外部源产生的一个事件使正常的程序产生暂 时的停止,称之为异常。
2.4.1 ARM体系结构的异常类型
• ARM体系结构支持7种类型的异常
• 异常出现后,强制从异常类型对应的固定存储器地址开始 执行程序。这些固定的地址称为异常向量(Exception Vectors)。
M[4:0]模式控制位
M[4: 0] 10000 10001 10010 10011 10111
处理器工作 模式 用户模式 FIQ模式 IRQ模式 管理模式 中止模式
可访问的寄存器 PC,CPSR,R14~R0 PC,R7~R0,CPSR, SPSR_fiq,R14_fiq~ R8_fiq PC,R12~R0,CPSR, SPSR_irq,R14_irq, R13_irq PC,R12~R0, CPSR, SPSR_svc,R14_svc, R13_svc PC,R12~R0, CPSR, SPSR_abt,R14_abt, R13_abt
基于FDM 3D打印机机械结构和控制系统设计的研究

基于FDM 3D打印机机械结构和控制系统设计的研究
童和平;张香红;肖晓兰;李达人
【期刊名称】《机电工程技术》
【年(卷),期】2024(53)4
【摘要】研究FDM技术支持下的3D打印机设计策略。
使用步进控制精度在0.002 mm的丝杠滑块和步进电机的核心坐标控制系统,分别使用1组丝杠控制X 轴和Y轴的定位,使用2组丝杠控制Z轴的定位,使用3组FDM挤出系统控制彩色打印过程,在探讨了坐标控制算法和冷却成型算法后,设计了一种包含7个执行机构且有LED综合状态显示功能的3D打印机机械结构和控制系统,且该系统可直接通过USB连接线从桌面端直接将文件传输到3D打印机的ARM系统中。
基于FDM 3D打印机机械结构和控制系统设计的研究,可以得出:通过对坐标控制算法和冷却成型算法进行革新,提升对步进电机的控制策略,增加驱动程序可识别的3D模型文件种类,对FDM材料的成型过程进行进一步优化控制,是未来FDM技术支持下的3D打印机重点发展方向。
【总页数】4页(P180-183)
【作者】童和平;张香红;肖晓兰;李达人
【作者单位】广东开放大学机电工程学院;广东工业大学机电工程学院
【正文语种】中文
【中图分类】TP334
【相关文献】
1.基于FDM的彩色3D打印机控制系统设计
2.基于恒温控制的FDM3D打印机PID系统设计
3.FDM技术下的3D打印机机械结构和控制系统设计探讨
4.基于FDM工艺的3D打印机机械结构设计
5.基于FDM技术的多喷头3D打印机机械结构和控制系统关键技术研究
因版权原因,仅展示原文概要,查看原文内容请购买。
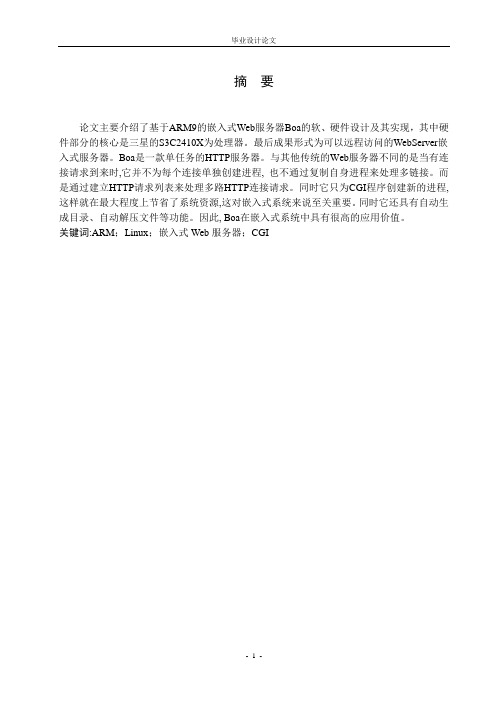
基于Android平台的无线打印模块设计
设 备 提 供 打 印机 驱 动 程 序 。本 文 设 计 了 一 种 新 型 的 基 于
An d r o i d平 台 的无 线 打 印 模 块 , 采 用移 植 L i n u x下 相 关 开 源驱动 的方 式 , 通 过 调 用 Li n u x内 核 的 C UP S( C o mmo n
瘗
地J
基 于 An d r o i d平 台 的 无 线 打 印模 块 设 计 *
陈剑 。陈 华政
( 广 东 科 学 技术 职业 学 院 计 算 机 工 程 技 术 学 院 , 珠海 5 1 9 0 9 0 )
摘 要 :在 ARM 芯 片 AT9 1 RM9 2 0 0上 构 建 了无 线 打 印模 块 的硬 件 平 台 , 在 An d r o i d操 作 系统 上 完成 了软 件 平 台 的搭 建 ,
文 献 标 识 码 :A
De si g n o f W l r el e s s Pr i n t er Mo d u l ar Bas e d o n An dr oi d
Ch e n J i a n,Ch e n Hu a z h e n g
( C o mp u t e r E n g i n e e r i n g Te c h n i c a l C o l l e g e , Gu a n g d o n g I n s t i t u t e o f S c i e n c e a n d Te c h n o l o g y,Z h u h a i 5 1 9 0 9 0 ,Ch i n a)
移 动 终 端 搜 索 、 v i F i 无线 网络
发送打 印命令
打印机接收打 印 命令并打印文件 打 印机发送结束命令 适配器接收结束命令 并标注 已打 印文件
第7章基于Arduino控制的3D打印机项目

图7-11 材料图
图7-12 联轴器和电机组装图
图7-13 固定图
找出剩余的两根光轴和丝杆,组装成图7-14的样式。 安装过程中要特别注意,光杆要轻缓的穿过直线轴承。 如果遇到阻塞,可以适当的调节期间的宽度,但是动作 一定要轻缓。
图7-14 光轴与丝杆组装图
找出同步带、扎带、张紧弹簧,按图7-15的方法和Y 轴同步带进行组装,一定要注意张紧弹簧的安装位置。
72材料清单序号元器件名称型号参数规格数量参考实物图型材2020铝材246mmx2020铝材410mmz2020铝材385mmy2020铝材410mm横2020铝材230mm横2020铝材150mm耗2020铝材100mm耗电源线12v25maarduino主控板mega2560reprapramps14打印件详见教材配套资料32个1015个11螺母5t124t13直线轴承10个14燕尾夹15联轴器16限位开关ss5g17t8铜螺18轴承m519弹簧20张紧弹簧21同步轮22同步带23usb线24电源线12v25热缩管若干27杜邦线28风扇29固体胶30喷嘴组31螺丝m5821个32m51033m52534m3835m31011个36m31437m31613个38m32039m32540m34041m41022个42包线管43电机17hd4000522b73安装过程首先将所有的型材进行分类找出x型材245mmy型材385mmm5螺丝m5t螺母和角件如图71所示
7.3.2 平台安装
1.平台安装
找出铝板、直线轴承3个、打印件4个、M3螺丝8个、M3T螺母8个、 扎带6个。首先用扎带固定直线轴承在打印件上,之后减掉多余的扎带。然后 将三个直线轴承固定在铝板上。如图7-6所示。
图7-6 直线轴承固定示意图
ARM与单片机的区别
一、软件方面这应该是最大的区别了。
引入了操作系统。
为何引入操作系统?有什么益处嘛?1)方便。
主要表此刻后期的开发,即在操作系统上直接开发应用程序。
不像单片机一样一切都要从头写。
前期的操作系统移植工作,仍是要专业人士来做。
2)安全。
这是LINUX的一个特点。
LINUX的内核与用户空间的内存管理分开,不会因为用户的单个程序错误而引发系统死掉。
这在单片机的软件开发中没见到过。
3)高效。
引入进程的管理调度系统,使系统运行加倍高效。
在传统的单片机开发中大多是基于中断的前后台技术,对多任务的管理有局限性。
二、硬件方面此刻的8位单片机技术硬件发展的也超级得快,也出现了许多功能超级壮大的单片机。
可是与32ARM相较仍是有些差距吧。
ARM芯片大多把SDRAM,LCD等控制器集成到片子当中。
在8位机,大多要进行外扩。
总的来讲,单片机是个微控制器,ARM显然已是个微处置器了。
arm是单片机的一种,51也是,但arm的ROM和RAM远大于51,而且IO口功能和处置速度也是两个级别的,arm能上很多操作系统,51只能勉强上极为简单的实时操作系统,所以arm常常利用来开发等多媒体产品,51只能完成有限的实时控制功能,形象一点说,51和arm的品级不同就像和个人电脑的品级不同。
arm此刻分为A R M三个系列,A面向高端,M主要面向低端,或说白了就是单片机,此刻比较流行的cortex-m3,区别的话,应该在于高端低端,和性能上面;stm32(cortex-m3内核)的低端的价格可以低到10块钱以下,价格非常的低廉,性能很强,而且有库函数的支持,开发的流程简化很多,理论上应该会替代,但是其他的单片机也有自己的优势,比如:51也有自己的优势,简单,使用的人多,价格更低,开发工具更多,MSP430的低功耗,各有各的优势,取不取代还要看市场,公司的推广ARM与单片机其实没有什么区别的,ARM就是集成了各类模块,可以不像51单片机那样还要买什么芯片所需要的功能,ARM自身就集成了,直接写寄放器就哦了~~当然ARM的功耗低,实现的功能强大就不说了~~我感觉ARM最大的优点就是移植操作系统了!!这个是学习ARM的大方向吧,呵呵~~第一,处置速度块、处置能力强、贮存容量大、给用户带来便利传统的51单片机为8为处置器,而ARM芯片为32位处置器,简单的说,51单片机就是前期咱们应用的“赛扬”式电脑,而ARM芯片就是我们此刻应用的“双核”式电脑。
嵌入式系统课程设计题目
嵌入式系统课程设计题目1.ARM系统在LED显示屏中的应用(利用ARM系统控制彩色LED显示屏)2.ARM-Linux 嵌入式系统在农业大棚中的应用(温度、湿度和二氧化碳浓度是影响棚栽农作物生长的3 大要素。
为了实现农业大棚中这3 种要素数据的远程实时采集,引入了当前嵌入式应用中较为成熟的ARM9 微处理器和Linux 嵌入式操作系统技术, 采用温度传感器PH100TMPA、湿度传感器HM1500 和二氧化碳浓度传感器NAP221A ,设计一种基于TCP/ IP 协议的嵌入式远程实时数据采集系统方案。
从硬件设计和软件实现2方面对该系统进行具体设计。
)3.ARM 嵌入式处理器在智能仪器中的应用(设计一种基于ARM 嵌入式处理器系统的智能仪器的硬件和软件设计方案, 并结合uc/o s2II或者Linux嵌入式实时操作系统, 给出一套完整的任务调度和管理的方法, 最后用实例说明)4.ARM系统在汽车制动性能测试系统中的应用(采用ARM系统构建一个路试法的汽车制动性能测试系统)5.ARM 嵌入式控制器在印染设备监控中的应用(针对拉幅热定型机,设计一种基于485 总线的分布式监控系统。
用ARM 嵌入式控制器实现主、从电机的同步运行和烘房温度的控制;在PC 机上用VB6. 0 设计转速和温度的监控画面;实现ARM、变频器和PC 机之间的数据通信。
)6.基于ARM系统的公交车多功能终端的设计(完成电子收费、报站、GPS定位等功能)7.基于ARM9的双CAN总线通信系统的设计(设计一种基于ARM9内核微处理器的双路CAN总线通信系统。
完成系统的总体结构、部分硬件的设计,系统嵌入式软件的设计,包括启动引导代码U - boot、嵌入式L inux - 操作系统内核、文件系统以及用户应用管理软件四个部分。
)8.基于ARM9 和Linux 的嵌入式打印终端系统(嵌入式平台上的打印终端的外围电路连接设计、嵌入式Linux 的打印机驱动程序开发和应用程序的开发)9.基于ARM 的车载GPS 终端软硬件的研究(重点研究基于ARM 的导航系统的软硬件设计)10.ARM系统在B超系统中的应用(完成系统软件硬件设计,包括外围电路)11.基于ARM 的嵌入式系统在机器人控制系统中应用(提出一种基于ARM、DSP 和arm-linux 的嵌入式机器人控制系统的设计方法, 完成控制系统的功能设计、结构设计、硬件设计、软件设计)12.基于ARM的视频采集系统设计(完成系统软件硬件设计,包括外围电路,采用USB接口的摄像头)13.基于ARM的高空爬壁机器人控制系统(构建一种经济型的爬壁机器人控制平台, 与上位机视觉定位和控制系统结合,使其适用于导航与定位、运动控制策略、多机器人系统体系结构与协作机制等领域。
ARM体系简介解析
2、采用哈佛结构
根据计算机的存储器结构及其总线连接形式,计算机系统可以分为冯· 诺 依曼结构和哈佛结构。ARM9采用的就是哈佛结构,而ARM7采用的则是 冯·诺依曼结构。
主流的ARM处理器介绍
冯· 诺依曼结构
数据存储器
哈佛结构
地址 数据 地址 指令 CPU PC
程序存储器
在RISC架构的处理器中大约有30%的指令是Load-Store指令,而采 用哈佛结构将大大提升这两个指令的执行速度,提高系统效率。
ARM9是本书所采用的微处理器,下面关于ARM9的介绍也是更多地 集中于ARM9E。
主流的ARM处理器介绍
• ARM9处理器的特点 • 1、流水线
对嵌入式系统设计者来说,硬件通常是第一考虑的因素。每一级流水 都对应CPU的一个时钟周期,如果一级流水中的逻辑过于复杂,使得执 行时间居高不下,必然导致所需的时钟周期变长,造成CPU的主频不能 提升。所以流水线的拉长,有利于CPU主频的提高。Arm7使用三级流水 线、ARM9使用五级流水线。
Cortex-M系列基本特征:
成本低 能耗低可兼容性好 易于使用
主流的ARM处理器介绍
• ARM Cortex嵌入式处理器应用领域
Cortex-R系列基本特征 快速 确定性 安全 成本效益
Cortex-M系列应用领域
Cortex-R系列应用领域
主流的ARM处理器介绍
• 经典ARM处理器
S3C2440A处理器
• 我们使用的开发板是基于S3C2440A处理器的。S3C2440A是一款由 Samsung公司使用ARM920T核,它的低功耗、精简而出色的全静态设计 特别适用于对成本和功耗敏感的领域。S3C2440A实现了MMU、 AMBA(Advanced Micro controller Bus Architecture)BUS和哈佛高 速缓冲体系结构。
基于ARM9的Web服务器Boa的软、硬件设计
基于ARM9的Web服务器Boa的软、硬件设计作者:金勇来源:《电子世界》2013年第13期【摘要】文章介绍了基于ARM9的嵌入式Web服务器Boa的软、硬件设计及其实现,硬件部分的核心是三星的S3C2410X处理器。
最后成果形式为可以远程访问的WebServer嵌入式服务器。
Boa是一款单任务的HTTP服务器。
与其他传统的Web服务器不同的是当有连接请求到来时,它并不为每个连接单独创建进程,也不通过复制自身进程来处理多链接。
而是通过建立HTTP请求列表来处理多路HTTP连接请求。
同时它只为CGI程序创建新的进程,这样就在最大程度上节省了系统资源,这对嵌入式系统来说至关重要。
同时它还具有自动生成目录、自动解压文件等功能。
因此,Boa在嵌入式系统中具有很高的应用价值。
【关键词】ARM;Linux;嵌入式Web服务器;CGI1.ARM简介广义地讲,凡是带有微处理器的专用软硬件系统都可以称为嵌入式系统。
它是嵌入到对象体系中的专用计算机系统,以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗等严格要求的专用计算机系统。
目前非常流行的ARM 内核有ARM7TDM1、StrongARM、ARM720T、ARM9TDM1、ARM920T、ARM940T、ARM946T、ARM966T、ARM10TDM1等。
本文所讨论的目标板的CPU为ARM920T内核的三星S3C2410芯片。
ARM9系列微处理器主要应用于无线设备、仪器仪表、安全系统、机顶盒、高端打印机、数字照相机和数字摄像机等。
它包含ARM920T、ARM922T和ARM940T三种类型,广泛应用于PDA、移动通信、路由器、工业控制等领域。
2.嵌入式Web服务器实现原理嵌入式Web服务器是指将Web服务器引入到现场嵌入式设备中,并驻留其中有限的代码空间内。
与传统的Web应用相比,简化了系统结构,并将信息采集和信息发布都集成到现场的嵌入式设备中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
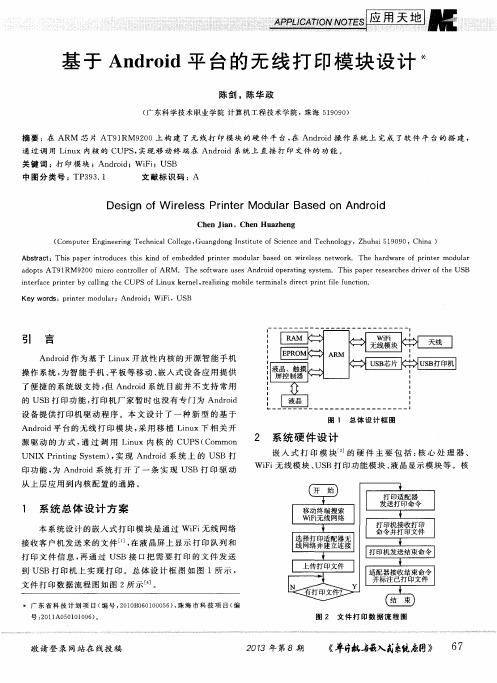
1概述 每一点行 为 5 6 7 个点。假设数据 的传输频率 为 印头。打印头内置热敏电阻由 T E M S O 连 H R I R T 热敏打印机根据其热敏元件的排列方式可 1 H , M z每一点行的加热时间为 l s m, 走纸电机的驱 接到外部检测电路 , L 3 9 经过 M 3 M比 器, 一旦温 分 为行式热敏(h ra ieD tSs m 和列式 动频率为 1O p s采用普通控制模式, T em lLn o yt ) e 5 O p, 打印每一 度超过极限温度, 就通过 OV R H T脚发出低电 E _O 热敏(’ a Sr l o ytm) .I l ei t s 。列式 I咖 a D S e I 印 点行时问为: 7 5 10 6 =. m ,打印速度为 平给主控芯片. 0 6+ + . 72 3 s . 6 4 从而可以 及时采取相应的保护措 主要应用于打印速度要求不高的场合,国内已经 4 0 1 点行砂 ; 而采用先进控制模式, 打印每一点行 施 。 有应用。行式热敏打印较列式热敏打印的打印速 的时间为 :+. 7 1 6 m , 10 6 =. 7 s打印速度为 5 9点行, 6 6 9 5热敏打印机软件功能 度快很多,目 前国内的最快速度达到 2 0 m 。 秒 , 2m  ̄ 由此可见, 软件的主要功能是接收来 自 主机通过串 口 行式热敏打印是现在热敏打印机的主流打印方 4热敏打印机的硬件结构 或并 口 发来的数据, 然后判断数据的 类型。 如果是 法。 要想实现高速热敏打印, 选取高速热敏打 除了 4 1系统结构。硬件系统 由控制器、走纸电 印的字符 , 则从 F A H中取出各字符的字形码 , LS 印头外 , 还必须有相应的控制板。 根据热敏打印机 机、 热敏打印头以 及检测和保护电路组成。 并进行转换,然后送往打印头的行缓冲区进行打 性能要求 , 了 介绍 行式热敏打印机的原理、 组成和 4 2打 印头 。行式热敏打印机 ,在一条长 印 ; 如果数据是控制命令 , 则转到相应控制命令的 容易 发生故障的处理。 7r 2 m的基体 E a 均匀安装 5 6 7 个发热元件。 打印前 执行程序。 在对打印头传送数据时 , 使用了 A M R 2热敏打印机工作原理 将 V 连到打印机电源 , p 要打印的数据在时钟的配 控制器的 S I 因 A M只需向打印头单向传送 P 口, R 热敏打印机的原理是, 在淡色材料上( 通常是 合下由 D T端移到移位寄存器。当一个点行 的 数据, A 仅是主从式工作方式 , 所以只要通过 3 根 纸) 覆上一层透明膜 , 将膜加热—段时问后变成深 56位数据 全部 移到 移位 寄存器 后 ,锁存 端 线——时钟线( K L ) 7 S C K、 P 数据输 出线( L O O S M S、 P 色 搬是黑色, 也有蓝色) 图象是通过加热 , 。 在膜 AT C 低, 片选线( I 行通信, 部通过 S I A 寄存器完 Ci s挂 内 PD T 中产生化学反应而生成的。这种化学反应是在一 锁存寄存器; 然后在数据选通端 s 生低电平, 成转换。 定的温度下进行的。 高温会加速这种化学反应。 此时再根据输入的数据是 1 0 当 或 决定发热元件是 6对比 针式打印机 温度低于 6 'r , o f膜需要经过相当长, o 甚至长达几 否发热 , 从而在热敏纸 匕 产生要打印的点行 , 每一 6 . 1针式打印机原理。 针式打印机, 提指 年的时间才能变成深色;而当温度为 2o  ̄ , oo 这 点的规格均为 0 5 m 0 5 m 利用这种点阵方 矩阵针式打印机。 c . m x2 m 。 2 这种打印机主要是由打印头、 字 种反映会在 兀 微秒内完成。 式, 打印机可把组成文字和图像的打印点在热敏 车结构 、 色带、 输纸机构和控制电路组成。由于大 热敏打印机有选择地在热敏纸 的确定位置 纸 的 任意位置 匕 打印成像。这种技术已用于纸张 规模集成电路的发展 , 使打印机中也出现了基于 上加热, 由此就产生了相应的图形。 加热是由与热 打印机和标签打印机上。热敏打印头的关键技术 微处理器控制的系统。 这样, 打印机 匕 所有的机械 敏材 相壕 打印 上的— 电 热器 料 触的 头 个小 子加 提 在于加热元件 ,热敏打印机芯上有—排微小的半 上的复杂动作、字符的形成等都可以经过微处理 供的。加热器排成疗 点或条的形式由打印机进行 导体元件。 这些元件排得很密, Z Op 6Op 器进行存储记忆、 从 9di Odi - 控制和操作。 打印头是针式打印 逻辑控制 , 当被驱动时 , 就在热敏纸 E 产生—个与 不等。这些元件在通过—定电流时会很快产生高 机的核心部件, 它包括打印针、 电磁铁等。这些钢 当热敏纸的涂层遇到这些元件时 , 在极短的时 针在纵向 排成单列或双列构成打印头 , 某列钢针 加热元素相应的图 。 形 控制加热元素的同一逻辑 温 , 电路, 同时也控制着进纸, 因而能在整个标签或纸 间内温度会升高 , 涂层就会发生化学反应 , 出 显 颜 在电 磁铁的带动下 , 先打击色带( 色带多数是由尼 张上印出图形。 色。以 C 1 型行式热敏打印头为例, 26 其打印宽度 龙丝绸制成 , 带上浸涂有打印用的色料。 装色带的 3AR M控制器 可达 2 6mi,即 12 点行 。 1 l l 78 机构有盒式和盘式两种 , 由于盒式色带结构 比较 31控制器。热敏打印机选用高速微处理器 . 4 3走纸电路。打印机走纸控制采用双极斩 简单 , 更好 重 . , 以 力便 所 我们平时的针式打印机 及快速存储器 , 用以实现快速打印, 要求处理器给 波驱动的步进电机来实现。P ip 公司的 hi ls 专用双 上—般都用盒式色带 ) , 色带后面是同步旋转的打 /  ̄头传送数据的速度要快。所以 30 - 选用 A M7 全桥 P R 内 WM步进电机驱动器 A 9 9 L 来驱动电 印纸 , 2 1S B 从而打印出字符点阵 , 而整爪字符就是 由数 核芯片 A 9 F 06 作为控制器, r 1 4 12 r 该芯片具有 2 机 。驱动 器输 出双路可 直 接驱 动步 进 电机 , 根钢针打印出来的点拼凑而成的。 M 的片内高速 F s 存僻 器, 6 B的 R M容量 , P AS 1 P AS 2分另 由 A lh a } 2 K 5 0 4 H E和 H E H RM控制器输出相 6 2打印结果对 比。热敏打印具有打印速度 噪音低 , 打印清晰 , 使用方便的优点。 但热敏打 K B的片内高速 S A 以 R M 在最高时钟速度下进 应脉冲来控制输 出脉冲 频率 , 从而得到理想的速 快、 A 99L 2 V 芯片参 印机不能直接打印双联 , 打印出 来的单据不能永 行单时钟周期访问探怍) , 片上收发器 , 8 3 字节可 度。 2 1S B驱动电机工作电压为+4 , 2 编程的 nF , O 主从串行外设接口 D8 位可 考供电电压为 V C 驱动芯片的电机驱动电流取 久保存 , , 以2 O , 如果用最好的热敏纸 , 能保存十年。而针 编程的数据长度 , 个片选线。通过 S I 传送数 决于参考 电压 V E 4 P口 R F和参考电阻 R ,以及 I 和 式打印可以打印双联, S o 而且如果用好的色带的话 , 据控制打印头 。每—个字符的字形码从内存中取 F 高低电平的组合 , I 在能带动打印纸的情况下 , 应 打印单据可以保存 久 , 良 但针式打印机打印速度 出。 并按照一定格式放入内存的打印点行缓冲区 , 尽量采用较小的供电电流。 通过 V 与 V 2的组 慢 , R1 R 噪音大, 打印字迹粗糙, 需要经常更换色带。 如 最后将点行缓冲区的内容送到打印头的移位寄存 合,可以给驱动电机提供不同的基准电压 V , R从 果用户需要打印发票 , 建议使用针式打印 , 其他打 器中, 进行加热打印。打印的汉字采用 2:4 42 点 而给 < 走纸电机提供不同的供电电流。 印其他单据时 , 建议使用热敏打印。 阵, 这样对每—个汉字 , 就要先由该汉字的机 内 码 4 - 4打印头保护及
科
: R 高速 打 印 ; 印 头 A M; 打
的热敏 打 印机 系统
施坚强 - 吴 丹 z
( 、 尔滨点 时信息服务有限责任公司 , 1哈 黑龙江 哈 尔滨 10 0 2哈 尔滨铁路 电子公 司, 501 、 黑龙江 哈 尔滨 10 0 ) 50 0