精密三轴测试转台控制系统设计与实现
三轴转台结构介绍

三轴转台结构介绍三轴转台是一种用于控制运动方向和角度的机械装置。
它通常由三个相互垂直的轴组成,分别是水平轴、垂直轴和旋转轴。
三轴转台主要用于航空航天、军事、船舶、机器人等领域的精密定位和追踪操作。
水平轴是三轴转台的基本轴之一,也是最基础的运动轴。
它使转台能够在水平方向上进行平移运动,常用于改变转台的位置。
垂直轴是另一个基本轴,它使转台能够在垂直方向上进行上下运动。
通过控制垂直轴的运动,可以改变转台的高度。
旋转轴是最重要的轴,它使转台能够在水平面内进行旋转运动。
通过控制旋转轴的运动,可以改变转台的方向和角度。
三轴转台的结构设计要考虑到稳定性、精度和可靠性。
为了保证转台的稳定性,常采用重型结构和防震装置来减少外界干扰对转台运动的影响。
为了保证转台的精度,需要采用高精度的轴承和驱动装置,以及精密的控制系统。
为了保证转台的可靠性,需要采用可靠的传感器和执行器,并进行合理的维护和检修。
在航空航天领域,三轴转台广泛应用于卫星地面测试和发射场测试。
在卫星地面测试中,可以使用三轴转台模拟卫星在轨道上的运动,以验证卫星的姿态控制系统和传感器的性能。
在发射场测试中,可以使用三轴转台模拟发射过程中的运动情况,以验证发射车辆和卫星的适应性和可靠性。
在军事领域,三轴转台主要应用于导弹、雷达和光电设备的定位和追踪。
通过控制转台的运动,可以实现对目标的精确定位和持续追踪,提高军事系统的作战效能和战场信息获取能力。
在船舶领域,三轴转台主要应用于船舶导航系统和海洋观测设备的定位和导航。
通过控制转台的运动,可以实现对船舶航向和船首方向的控制,提高航行安全性和导航精度。
同时,通过安装观测设备,可以对海洋环境进行实时监测和数据采集。
在机器人领域,三轴转台主要应用于机器人的运动控制和视觉定位。
通过控制转台的运动,可以实现机器人在三维空间的精确定位和运动控制,提高机器人的运动灵活性和操作精度。
同时,通过安装相机和传感器,可以实现机器人的视觉感知和环境识别,提高机器人的自主导航和任务执行能力。
三轴雷达仿真转台设计
摘要三轴雷达仿真转台是三轴转台的一种,本次设计的三轴雷达仿真转台主要用于某型机载雷达的测试。
转台性能的优劣直接关系到仿真和测试试验的可靠性,是保证某型机载雷达的精度和性能的基础。
本文针对三轴雷达仿真转台的机械结构设计进行了详细的讨论,并进行了理论论证及必要的计算,同时对本转台中使用到的测量元件及联轴器等其他原件的结构及原理作了简单的介绍,设计中采用铸铝合金作为台体的材料,实现了低转速、高精度的要求,并且减轻了整体的重量,使机构在满足:转角范围、速度范围、最大角加速度等设计参数要求的前提下,使结构设计尽量优化。
本设计紧紧围绕着设计任务书中的各项指标,从内环开始至外环一步一步地展开设计。
本文主要内容包括转台的总体结构论证、转台的详细结构设计、转台的误差分析等。
结合转台设计的特点,本文重点讨论了转台机械结构的设计思想及设计过程。
关键词:三轴仿真转台;机载雷达;测量元件;联轴器:内环:中环:外环。
ABSTRACTThree shafts radar simulation turntable is one type of the three shafts turntable . The three shafts radar simulation turntable in this design is mainly used to test a certain type of airborne radar. The simulation turntable has great influence on the reliability and credence of experimentation,so the precision accuracy of a certain type of airborne radar is based on simulation turntable.This paper discusses detailedly the design of mechanical structure of the three shafts radar simulation turntable . Then uses the principle to demonstrate it and do the necessary calculation . At the same time, introduce the principle and structure of measurement components and clutch and other components used in the turntable in brief . This design closely revolves around every targets in design assignment,and spreads out from inner frame to outer frame step by step. The chief content of this paper involves the demonstration of the general structure , the design of the detailed structure and the analysis of error of the turntable. Combining the designing character of the turntable ,this paper emphatically discusses the idea and the process in designing the turntable.Key words:;Three Axis simulation turntable;Airborne radar;Measuring element;Coupling;Inner ring;Central;Outer ring目录摘要 (1)第1章绪论 (5)1.1课题背景 (5)1.2.1 智能扫描机械台的发展状况 (5)1.2.2 国内智能扫描机械台的发展状况 (7)1.2.3 未来转台的发展趋势 (8)1.3 立题的目的和意义 (8)1.4 本文主要工作 (8)第2章智能扫描机械台总体设计 (9)2.2总体设计流程 (9)2.3转台类型的确定 (9)2.4转台运动功能设计 (10)2.4.1 工作原理 (10)2.4.2 运动功能方案 (10)2.5转台总体布局设计 (10)2.6转台主要参数设计 (11)第3章智能扫描机械台机械结构详细设计 (12)3.1转台内环结构设计 (12)3.1.1 结构设计 (12)3.1.2 转矩计算 (13)3.1.3轴向固定方式的选择 (14)3.1.4轴的最小直径的确定 (15)3.1.5轴承的选择 (15)3.1.6轴承的固定与密封 (15)3.1.7内框轴与负载盘的联接方式 (16)3.1.8 主要零件刚度校核 (17)3.1.9 电机转矩的校核 (18)3.2转台中环结构设计 (19)3.2.1 结构设计 (19)3.2.2 转矩计算 (20)3.2.3 电机转矩校核 (21)3.3转台外环结构设计 (21)3.3.1 结构设计 (21)3.3.2 转矩计算 (21)3.3.3 电机转矩校核 (23)3.4机械转角限位装置设计 (23)第4章误差分析 (26)4.1回转精度分析 (26)4.1.1 滚动轴系回转精度 (26)4.1.2 俯仰轴系回转精度 (26)4.1.3 方位轴系回转精度 (27)4.2三轴相交度分析 (27)4.2.1 滚动轴与俯仰轴的相交度 (27)4.2.2 俯仰轴与方位轴的相交度 (28)第5章测量及其它元件简介 (29)5.1直流无刷电机 (29)5.2感应同步器 (30)5.3绝对式光电码盘 (30)5.4钢丝滚道轴承 (31)5.5胀紧式联轴器 (32)结论 (33)参考文献 (34)致谢 (33)第1章绪论1.1 课题背景远古时代,人类的祖先面对着充满神秘色彩的天空,编织出许多美丽、动人的神话、传说故事。
三轴仿真转台上位机软件设计
求发 送指 令给 伺服 驱动 器, 由伺 服驱 动器驱 动伺 服电 机执 行相 关指 令。 交 流伺 服系 统是 由交 流伺 服放 大器 、交 流伺服 电机 和光 电编 码器 组成 的闭 环 控制系统。伺服放大器接受来QPMAC卡的脉冲信号( 脉冲的个数和频率分 别对应位置和速度的给定值) ,并以此为给定值控制电机的转动。伺服放 大器 从光 电编 码器 获得 闭环 系统 的位 置反馈 信号 ,并 将此 信号 传给 电机 控 制#。
[ 关键词] 转台上位机软件PMAC 中图分类号:TP273+.5 文献标识码: ^ 文章编号;1671 - - 75 97( 2 008 ) 111 0116 一02
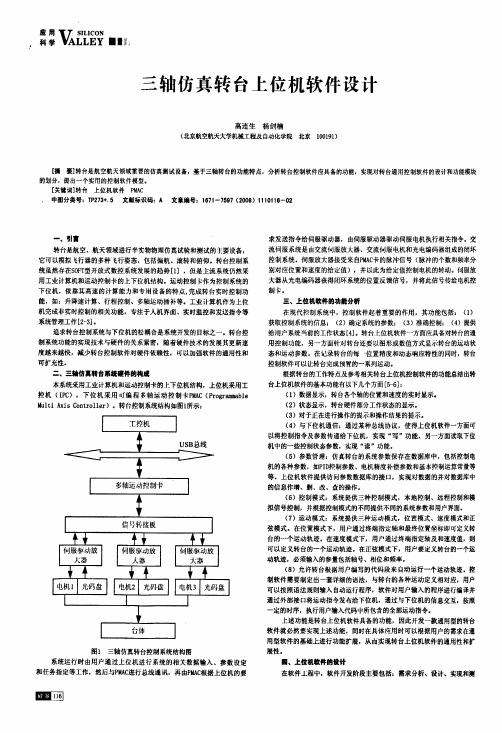
一 、弓 I一 转台是 航空、航 天领域进 行半实物物 理仿真试 验和测试 的‘t 要设 备, 它可以模拟b行器的多种飞行姿态,包括偏航,滚转和俯仰。转台控制系 统虽然存在SOFT型开放式数控系统发展的趋势[ 1] ,但是土流系统仍然采 用 工业 计算 机和 运动 控制 卡的 上下 位 机结 构。 运动 控制 膏作 为控 制系 统的 下 位机 ,依 靠其 高速 的计 算能 力和 专 用设 备的 特点 ,完 成转 台实 时控 制功 能 ,如 ;升 降速 计算 、行 程控 制、 多 轴运 动插 补等 。工 业计 算机 作为 上位 机 完成 非实 时控 制的 相关 功能 ,专 注 于人 机界 面, 实时 监控 和发 送指 令等 系统管理工作[2—3]。 追求 转台 控制 系统 与下 位机 的松 耦合是 系统 开发 的目 标之 一。 转台 控 制 系统 功能 的实 现技 术与 硬件 的关 系 紧密 ,随 着硬 件技 术的 发展 其更 新速 度 越来 越快 ,减 少转 台控 制软 件对 硬 件依 赖性 ,可 以加 强软 件的 通用 性和 可扩充性。 :、 三轴 仿真转 台系 统硬件 的构 成 本系 统 采用工 业计 算机 和运 动控 制卡 的十 下位 机结 构, 上位 机采 用工 控机( I PC) , 下位机采用 町编程多轴 运动控制 卡PMAC( Pr ogr ammabl e Mul t i Axi s Con t r ol l er ) 。 转台控 制系 统结构 如图 l 所示 :
三轴飞行仿真转台控制系统设计

三轴飞行仿真转台控制系统设计路平;刘凯;王龙【摘要】为实现转台的高精度控制,设计了转台数字控制系统.该控制系统以MSP430单片机为控制核心,采用模块化的设计理念和开放式的结构形式,设计了转台控制系统的硬件电路,并对其功能和原理进行了论述.以VC+ +6.0为开发环境,设计了控制系统的上位机软件结构;以IAR EW 5.0为开发环境设计了控制系统的下位机软件结构.为验证控制系统的性能,进行了控制实验,结果表明:系统控制效果良好,达到了预期效果.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)009【总页数】5页(P110-113,117)【关键词】三轴转台;控制系统;硬件电路;软件设计【作者】路平;刘凯;王龙【作者单位】军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003【正文语种】中文【中图分类】TP273三轴飞行仿真转台是一种在航空、航天等领域中进行模拟、仿真、测试等相关实验的半实物仿真设备,可以通过对三个框架实施不同的运动,模拟飞行器在空中的各种飞行动作和姿态变化,军事和民用价值日益突出。
转台的内、中、外三个框架分别模拟飞行器的滚转、俯仰、偏航运动[1]。
超低速、宽调速、高频响、高精度是仿真转台最重要的技术指标,设计合理的控制系统是实现转台技术指标的关键,关系到仿真结果的优劣[2]。
转台控制系统作为转台系统的核心部件,主要用于控制转台转动,实现转台的飞行仿真功能。
本文设计了一种基于MSP430单片机的转台数字控制系统,从硬件设计、软件设计和系统调试与转台控制实验三个方面对搭建的转台数字控制系统进行了较为详尽的阐述。
通过数字控制器实现对转台的闭环控制,控制策略采用软件程序实现,具有结构简单、控制精度高、抗干扰能力强、可靠性高等特点,控制效果良好。
转台控制系统的设计思路是采用人机交互界面的形式,实现转台指令的收发以及转台的检测;通过下位机即转台的数字控制器实现对转台的高精度控制。
转台运动性能检测系统的设计与实现

( ,S h o f e a o is N  ̄ w s r oy e ne nvri , i a 10 2 C ia 1 c o l h t nc , o h et n P lt h i U i s y X ’ n7 0 7 , hn ; o Me r e e l a e t 2 e a t e t fM c a i l n lc i ni er g Z e gh u Is tt o eo a t a Id s y Ma a e e tZ e gh u4 0 1 , hn ) .D p r n e h c d Ee t c E gn ei , h n z o n tue fA rn ui n u t n g m n, h n z o 5 0 5 C ia m o n aa ra l n i c l r
Ab t a t T e a c r c f ih p e ii n tr e a i r t l n i ot n u r n e o te v l i f va in smu a in r s t . sr c : h c u a y o g rc s h e —x st n a e i a h o u b s mp r tg a a te t h a i t o it i l t e u s a dy a o o l T e l e te a tma i ts f rt r t l ’ i e t s p o e is o o i o c u a y s e d a c r c , c e ea in a c r c n o r a i h u o t e t o u a e S k n ma i r p r e fp st n a c r c , p e c u a y a c l rt c u a y a d z c n b t l ’ n u d o t u nef c . is, h e in a d h r w r e e t n o T e p o h e  ̄ lp r a d c mb n n u a e S i p t t h nb n a up ti tr e F rt t e d sg a d a e s lci f a n o TK S a r — r
毕业设计_三坐标测量机原理及应用

三坐标测量机原理及应用摘要三坐标测量机是近40年发展起来的一种高效率的新型精密测量仪器。
它广泛地应用于机械制造、电子、汽车和航空航天等工业领域中。
它可以进行零件和部件的尺寸、形状及相互位置的检测。
如箱体、导轨、涡轮和叶片、缸体、凸轮、形体等空间型面的测量。
此外,还可以用于划线、定中心孔、光刻集成电路等,并可对连续曲面进行扫描及制备数控机床的加工程序等。
由于它的通用性强、测量范围大、精度高、效率好、能与柔性制造系统相连接,已成为一类大型精密仪器,故有“测量中心”之称。
三坐标测量机在模具行业中的应用相当广泛,它是一种设计开发、检测、统计分析的现代化的智能工具,更是模具产品无与伦比的质量技术保障的有效工具。
当今主要使用的三坐标测量机有桥式测量机、龙门式测量机、水平臂式测量机和便携式测量机。
测量方式大致可分为接触式与非接触式两种。
关键词三坐标测量机传感器三维光栅尺目录第一章三坐标测量机简介第一节三坐标测量机的意义 (3)第二节三坐标测量机的研究现状 (4)第二章三坐标测量机的组成与结构第一节三坐标测量机的组成 (5)第二节三坐标测量机的结构。
(6)第三章三坐标测量机的分类及测量方法第一节三坐标测量机的分类 (8)第二节三坐标测量机的测量方法 (9)第四章三坐标测量机的应用及发展第一节三坐标测量机的应用 (10)第二节三坐标测量机的发展 (13)结束语 (15)参考文献 (16)第一章三坐标测量机简介三坐标测量机指在一个六面体的空间范围内,能够表现几何形状、长度及圆周分度等测量能力的仪器,又称为三坐标测量仪或三次元。
三坐标测量机作为现代大型精密测量仪器已有40多年的历史,20世纪60年代以来,随着机床、机械,汽车、航空航天和电子工业的兴起,各种复杂零件的研制急需先进的检测仪器对其检测;同时,随着产品更新节奏的加快,对产品检测速度的要求也越来越高,三坐标测量机正是集合了这两个优点,得以在测量领域得到广泛的应用。
三轴测试转台结构设计与分析

三轴测试转台结构设计与分析作者:王晨晨来源:《科学导报·学术》2020年第33期摘要:本文介绍了一种用于天线测试的三轴重载高精度转台,转台各轴均采用双电机驱动的方式实现齿轮消隙,实现较高的定位精度。
文章详细介绍了转台的技术指标及结构组成,并对传动链功率设计进行了计算校核。
使用Hyperworks/optistuct软件有限元建模,对搬运器进行各工况下变形和强度的力学分析。
分析结果表明,整机安全裕度符合设计指标要求。
关键词:三轴测试转台;定位精度;双电机消隙;驱动回差;引言高精度的重载测试转台作为关键设備,在雷达天线内场、外场标定中起着不可替代的作用,其承载能力、测角精度和定位精度直接关系到测试实验的可靠性和置信度。
其中,精密三轴天线测试转台可在实验环境下模拟重型天线实际工作时的各种姿态,复现其不同姿态下的微波场特性,从而对其微波器件的功能和性能反复仿真、测试和标定,是天线近场测量的重要设备之一[1-3]。
随着雷达天线阵面尺寸重量的大型化和高精度化,对测量标定转台设备的性能和精度要求也在不断提高。
因此,高精度重载多轴测试转台的研究和制造,对航空航天及国防建设有重要意义[4]。
本文所述三轴转台主要为位置和随动功能转台,承载较大,为侧重静态稳态性能的角度指示型测试转台。
其可承载较大负载并实现三轴大范围转动,并可在大负载下保持在空间的稳定指向;可接收上位机的控制指令,实现相应的上方位、俯仰和下方位任意位置定位或随动运动,引导被测天线精确指向目标,并可长时间锁定在该位置,以满足标校测试要求。
1.技术指标及结构系统组成三轴测试转台由上、下方位轴和俯仰轴组成,各轴均具有定位锁定及掉电位置锁定功能。
其中上、下方位轴配置导电滑环,可360︒连续旋转,其它基本技术指标如下:三轴转台主要由上方位转台、俯仰轴系和下方位转台三大部分组成。
上方位转台由上台面、上回转支承、精密减速机、驱动齿轮、汇流环、双级旋变和上底座等组成;俯仰框架主要由主齿轮、中心主轴、轴承组、二级减速齿轮、限位开关、双级旋变、俯仰框架和限位挡块组成;下方位转台由下台面、下回转支承、精密减速机、驱动齿轮、汇流环、双级旋变和下底座等组成。
三轴飞型转台

摘要航空、航天工业发展水平是一个国家科技、经济和国防实力的重要标志。
而转台则作为航空、航天等领域中进行半实物仿真和测试的关键设备,也就在其研制过程中起到了极其重要的作用。
采用飞行模拟转台进行仿真不仅加快了武器与飞行控制系统的研制过程,也是研制费用大大降低,同时它是保证航空、航天型号产品和武器系统精度及性能的基础。
因此,转台的研究与制造对航空、航天工业和国防建设的发展具有重要作用。
本次毕业设计主要工作有对现有三轴飞行转台进行调研和分析,明确三轴转台的工作原理和结构组成部分,同时对实验室现有状况进行考察并对其建模,给出其中现有各物件尺寸及相对位置,还有设计外框马达单通道试验结构、中框马达单通道试验结构和内框电机试验结构、撰写论文。
关键字转台;仿真;驱动元件IAbstractAviation and aerospace industry development level is an important symbol of national science and technology, economy and national defense strength. While the turntable as aviation, aerospace and other fields ofhardware-in-the-loop simulation and test of key equipment, also in the process of its development has played a very important role.The flight simulation turntable simulation not only speed up the process of development of weapon and flight control system, also is development cost is greatly reduced, at the same time it is to ensure that aviation and aerospace model product and the basis of weapon system accuracy and performance. Therefore, the study of the turntable and manufacturing for the development of aviation, aerospace industry and national defense construction plays an important role.The graduation design main job is to the existing research and analysis for three axis turntable flight, clear the working principle and structure of the three-axis turntable part of inspection for the laboratory existing conditions and its modeling, given the current size of various objects and the relative position, and the design frame motor single channel of frame structure, the test motor single channel test structure and frame motor test structure, writing essays.Keywords turntable;simulation;driving elementII目录摘要 (I)Abstract ........................................................................................................................ I I 第1章绪论.. (1)1.1 课题研究的目的、背景和意义 (1)1.2 国内外测试转台的发展概况 (1)1.2.1 国外对测试转台的研究 (1)1.2.2 国内对测试转台的研究 (3)1.3 未来转台发展趋势 (5)1.4 本章小结 (5)第2章半实物仿真 (6)2.1 半实物仿真系统定义 (6)2.2 半实物仿真的先进性及其特点 (6)2.3 半实物仿真的基本组成和原理 (6)2.4 三轴飞型转台与半实物仿真 (7)2.5 本章小结 (8)第3章三轴转台的概述 (9)3.1 三轴转台工作原理的概述 (9)3.2 仿真转台驱动原件的选择和标准 (9)3.2.1 液压驱动的优缺点 (9)3.2.2 电机驱动的优缺点 (10)3.3 驱动型式的选择 (10)3.4 本章小结 (11)第4章驱动元件试验场地 (13)4.1 实验室地基 (13)4.2 储能器 (13)4.3 实验室整体建模 (14)4.4 本章小结 (15)第5章外框马达单通道实验方案 (16)5.1 试验环境 (16)5.2 马达受力计算 (16)III5.3 负载盘设计 (16)5.3.1 设计条件 (16)5.3.2 偏载件 (17)5.3.3 负载盘 (17)5.3.4 负载总成 (18)5.4 底座 (19)5.5 外框驱动元件试验结构 (21)5.6 本章小结 (22)第6章中框马达与内框电机试验 (24)6.1 中框马达试验 (24)6.1.1 试验环境 (24)6.1.2 模拟负载 (24)6.1.3 底座 (25)6.1.4 安装弯板 (25)6.2 内框电机试验 (25)6.2.1 模拟负载 (25)6.2.2 电机的安装及固定 (25)6.3 中框马达和内框电机试验 (26)6.4本章小结 (27)结论 (28)致谢 (29)参考文献 (30)附录1 (32)附录2 (36)IV第1章绪论1.1课题研究的目的、背景和意义航天、航空以及航海事业的发展水平反映了一个国家的综合国力,体现了一个国家的经济发展水平、科技发展水平以及军事实力的综合体现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011年机械电子学学术会议论文集 2011年9月
精密三轴测试转台控制系统设计与实现
黄建国
(南京电子技术研究所,江苏 南京 210039)
摘 要:本文论述了用于雷达天线测试的精密三轴转台的控制系统设计原理及关键技术。设计中采用
了基于8051F040的三轴步进电机驱动和双通道旋转变压器测角方案,转台的位置控制精度可达0.01°。
该转台具有硬件成本较低、控制精度高的特点。
关键词:精密转台;双通道旋转变压器;步进电机;三轴
Design and Realization of Three-axis Precise Test
Turntable Control System
HUANG Jian-guo
(Nanjing Research Institute of Electronics Technology, Nanjing 210039,China)
Abstract:The design principle and key technologies of the three-axis precise test turntable control system
for radar antenna test are described in this paper. Three-axis step motor driving based on C8051F040 and
two-speed resolver angle measurement is used in the design. The position control accuracy of the turntable
can reach 0.01°. The turntable has the advantages of lower cost and high accuracy.
Key words:precise turntable; two-speed resolver; step motor; three-axis
引 言
精密三轴天线测试转台是天线平面近场测量的重要设备之一, 要求实现高精度的上方位、俯仰和下方位运动,且在运动范围内任意位置锁定。主要技术指标如下:上、下方位轴旋转范围为0°~360°, 定位精度小于0.01°, 最高转速为6°/s,俯仰轴转动范围为-90°~90°, 定位精度小于0.05°, 最高转速为2°/s,转台承重1t。从指标看,转台转速较低,无动态指标要求,但要求定位精度高,低速平稳。常规齿轮传动无法保证0.01°的定位精度,为此方位采用机械消隙消除了转台回转误差的影响,测角采用直套式带通孔定位精度为±15s的双通道旋转变压器,通过采用上述措施保证了方位定位精度。俯仰采用具有自锁功能的精密蜗轮蜗杆减速器,末级齿轮传动,带动俯仰轴转动,测角采用0级精度的单通道旋转变压器。三轴驱动均采用德国百格拉步进电机。 1 系统组成 控制系统主要包括转台运动控制板、步进电机
及驱动器、双通道旋转变压器、单通道旋转变压器、
限位开关等。控制系统原理框图如图1所示。
图1 控制系统原理框图
控制系统全部安装于转台底座,系统布局更加
紧凑美观,布线少,转台控制仅需2根电缆(220V
120
2011年机械电子学学术会议论文集 2011年9月
交流供电和通讯电缆),另外,由于电机驱动电缆
短,也减少了电磁辐射干扰。转台结构外形见图2。
图2 转台结构外形图
2 控制系统设计
2.1 转台运动控制板
控制器以 C8051F040为核心,C8051F040是
完全集成的混合信号系统级MCU芯片,高速、流
水线结构的8051兼容的CIP-51内核。采用全速、
非侵入式在系统调试接口,提供C编译调试环境,
可以大大提高产品开发速度和效率。由于单片机内
置丰富的外围电路,简化了系统电路设计。单片机
主要完成三轴的速度和位置控制、步进脉冲控制、
RDC角度信息读取、限位状态采集、上位机通讯等
功能。转台运动控制板的功能框图如图3所示。
图3 转台运动控制板的功能框图
2.2 步进电机控制
该转台对动态性能要求低,设计时主要考虑低
速性能和定位精度。三轴驱动均采用德国百格拉步
进电机,具有成本低、电机端不需反馈信号、可靠
性高等优点。百格拉三相混合式步进电机采用了与
传统的两相和五相混合式步进电机不同的控制方
式,使其在很多应用中可以取代甚至优于交流伺服
电机。该电机驱动器的特点有:
1)定位精度高,在10000步/转时每步都能精
确运动和定位,而且输出扭矩不下降;
2)低速无爬行、噪音小、几乎无共振、低速
性能可与高档伺服的性能媲美。
单片机定时器具有方波输出功能,通过改变方
波频率控制步进电机的速度。单片机通过旋变的位
置反馈完成闭环位置控制。为使转台运动平稳,软
件采用了缓加减速功能。转台位置控制原理见图4。
图4 转台位置控制原理
转台上/下方位最小步进角度=360/最小细分/速
比=360/10000/360=0.0001°,满足方位0.01°的定位
精度要求。
3 软件设计
控制软件采用C语言编写。软件主要完成初始
化、通讯、上下方位和俯仰的位置控制、角度位置
读取、安全联锁保护、内建测试功能等。软件模块
主要包括主程序循环、串口通讯中断子程序、定时
中断子程序。其中,定时中断为10毫秒,完成数
据采样、位置回路控制等功能。主程序流程见图5。
图5 主程序流程图
定时中断子程序流程图如图6所示。
图6 定时中断子程序流程图
入口
初始化
工作指示
串口发送
内建测试
上方位
俯仰
下方位
控制箱
移动车
P调节
位置反馈
位置
设定
驱动器 电机 转台
旋变
脉冲
变频
中断入口
数据采集
上方位位置
回路控制
联锁保护
下方位位置
回路控制
俯仰位置回
路控制
返回
121
2011年机械电子学学术会议论文集 2011年9月
4 与国外同类产品主要指标的比较
该精密三维测试转台与国外同类型产品主要
指标比较见表1。
表1 主要指标比较
序号 主要指标 本转台
国外同类型产品
(NSI公司
NSI-SC-5675)
1 垂直承重 1000kg 1134kg
2
驱动方式 步进电机 步进电机
3 下方位速度 6°/s 5°/s
4 俯仰速度 2°/s 2.5°/s
5 上方位速度 6°/s 30°/s
6 方位定位精度 0.01° 0.05°
7 俯仰定位精度 0.05° 0.05°
8 上/下方位 测角精度 0.005° 0.005°
9 上/下方位齿隙 <0.01° 0.05°
10 上/下方位 最小步进角度 0.0001° 0.0015°
11 俯仰最小步 进角度 0.0000333° 0.0002°
从上述比较可以看出,该转台方位定位精度高
于NSI的同类型产品,测角精度相同。
5 结束语
精密三轴测试转台在雷达天线测量中有着广
泛的应用,本文提出的方案设计紧凑、可靠性高、
成本低,满足测量精度要求。目前,该转台已应用
于微波暗室雷达天线测量。
参 考 文 献
[1] 邓星钟. 机电传动控制[M]. 武汉:华中科技大学出
版社,2001.
[2] 童长飞. C8051F系列单片机开发与C语言编程[M]. 北
京: 北京航空航天大学出版社,2005.
[3] 李连升.雷达伺服系统[M]. 北京:国防工业出版社,
1983.
——————
黄建国(1973 -),男,高级工程师,主要从
事雷达伺服系统的研究开发工作。
E-mail: gulinpark@163.com
.
122