串联超前校正的计算方法
完成一个控制系统的设计任务,往往需要经过理论和实践的反复比较才可以
得到比较合理的结构形式和满意的性能,在用分析法进行串联校正时,校正环节
的结构通常采用超前校正、滞后校正、超前滞后校正这三种类型,也就是工程上
常用的PID 调节器。本次课设采用的超前超前校正的基本原理是利用超前相角
补偿系统的滞后相角,改善系统的动态性能,如增加相角裕度,提高系统稳定性
能等,而由于计算机技术的发展,matlab 在控制器设计,仿真和分析方面得到
广泛应用。本次课设采用用Matlab 软件对系统进行了计算机仿真,分析未校正
系统的动态性能和超前校正后系统是否满足相应动态性能要求。
超前校正就是在前向通道中串联传递函数为:
()()()1
11G c ++?==Ts aTs a s R s C s 其中:
C R R R R T 2
121+= 1221>+=
R R R a 通常 a 为分度系数,T 叫时间常数,由式(2-1)可知,采用无源超前网络进行
串联校正 时,整个系统的开环增益要下降 a 倍,因此需要提高放大器增益交易
补偿. 如果对无源超前网络传递函数的衰减由放大器增 益所补偿,则
()1
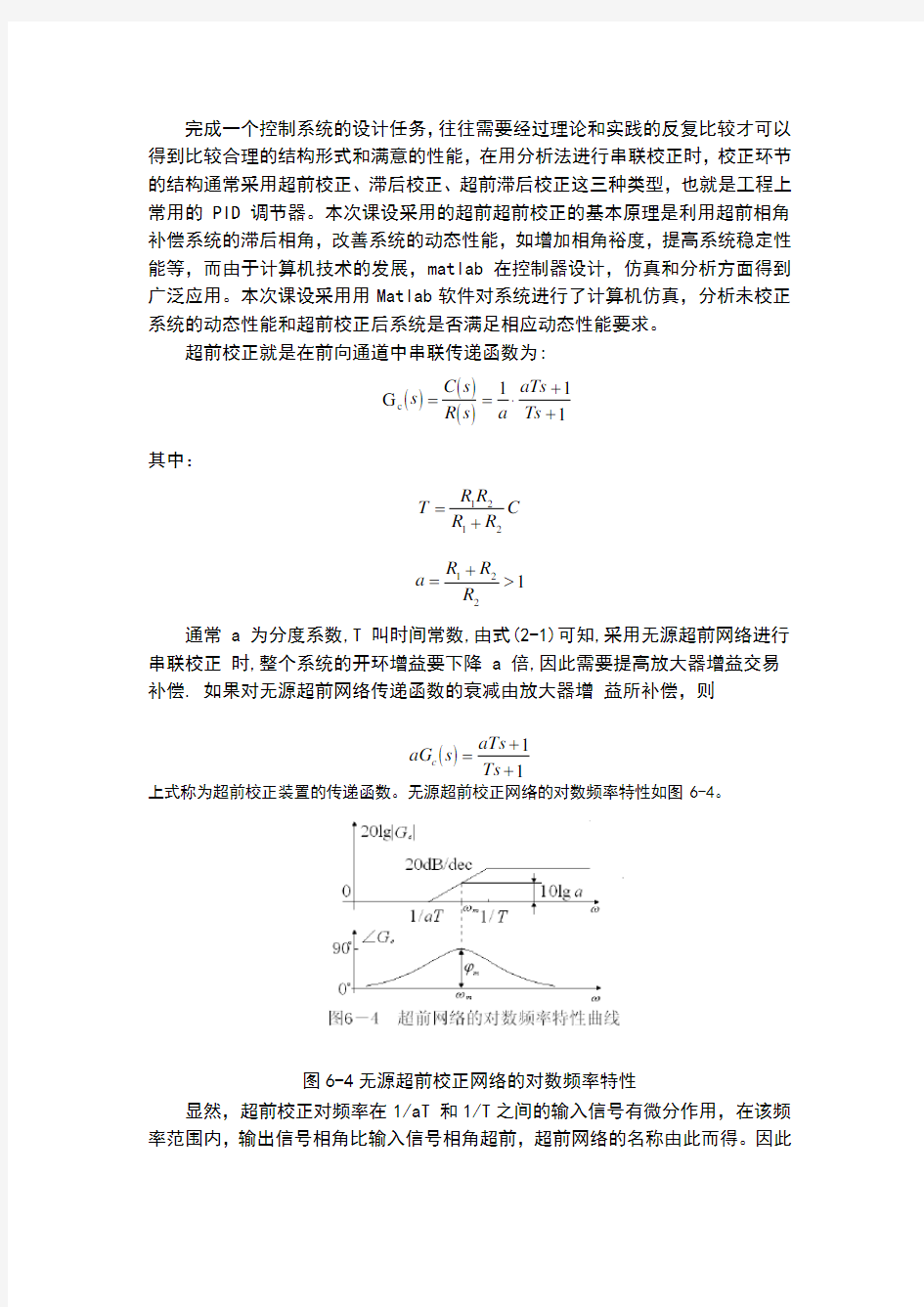
1++=Ts aTs s aG c 上式称为超前校正装置的传递函数。无源超前校正网络的对数频率特性如图6-4。
图6-4无源超前校正网络的对数频率特性
显然,超前校正对频率在1/aT 和1/T 之间的输入信号有微分作用,在该频
率范围内,输出信号相角比输入信号相角超前,超前网络的名称由此而得。因此
超前校正的基本原理就是利用超前相角补偿系统的滞后相角,改善系统的动态性
能,如增加相位裕度,提高系统的稳定性等。
下面先求取超前校正的最大超前相角m ?及取得最大超前相角的频率m
ω,则像
频特性: ()ω?c =arctanaT ω-arctanT ω ()()()221T
1d ωωω?ωT T a aT d c +-+= 当(),0=ω?ωd d e 则有: T a m 1=
ω 从而有:
a
a T a T T a aT 1arctan arctan 1arctan 1arctan m -=-=? =11arcsin 21arctan 111arctan +-=-=+-a a a a a
a a a 既当T a m 1=ω时,超前相角最大为11arcsin m +-=a a ?,可以看出m
?只与a 有关这一点对于超前校正是相当重要的
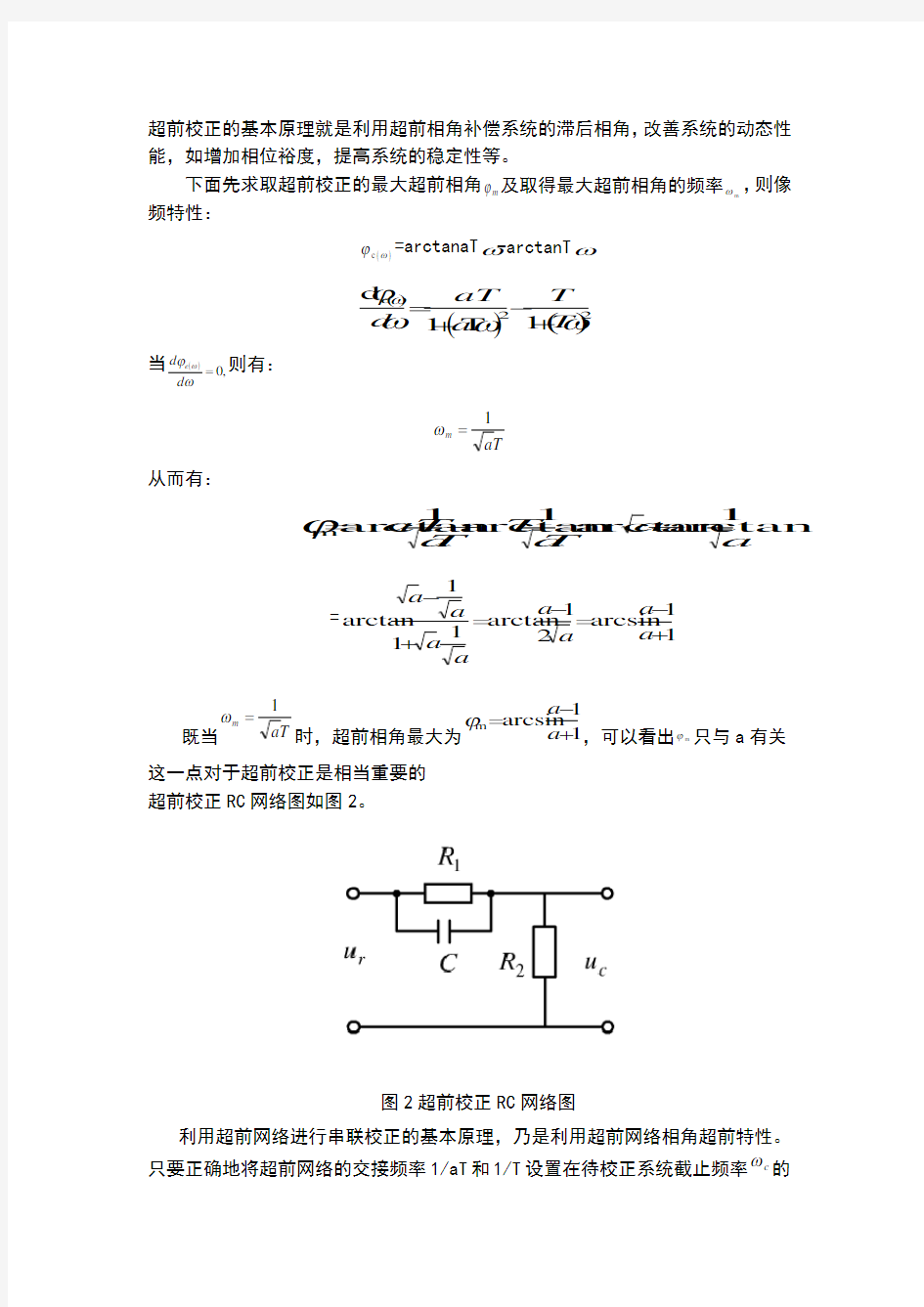
超前校正RC 网络图如图2。
图2超前校正RC 网络图
利用超前网络进行串联校正的基本原理,乃是利用超前网络相角超前特性。
只要正确地将超前网络的交接频率1/aT 和1/T 设置在待校正系统截止频率c ω的
两边,就可以使已校正系统的截止频率'c ω和相裕量满足性能指标要求,从而达
到改善系统动态性能的目的。
串联超前校正设计的一般步骤为
(1)根据稳态误差要求,确定开环增益K 。
(2)在已确定K 值条件下,计算未校正系统的相裕量。
(3)根据指标要求,确定在系统中需要增加的相角超前量。
(4)确定a 值及m L 值,在未校正系统的对数幅频特性曲线上找到幅值等于-m L 点所对应的频率,即为'c ω,这一频率为所选网络的c ω,并且在此频率上
将产生最大超前相角值m ?。
(5)确定超前网络的交接频率1ω=1/aT ,2ω=1/T 。
(6)验算。
二、原系统分析
设单位反馈系统的开环传递函数为:)
1001.0)(16.0)(1(5)(+++=s s s s s G 要求校正后系统的幅值裕度大于10dB ,相角裕度ο40≥γ,试设计串联超前
校正装置。
校正装置参数的确定
校正前截止频率s rad w c /73.1=,相角裕度γo o 402.16<-=,可知相角裕度不
满足要求,由此考虑加入串联超前校正系统。
为了满足校正后的系统的相角裕度?≥40γ的条件,故需要加入 m θ='γ-[γ-(??12~5)]=?40-[?-2.16-(??12~5)], 然后再根据2.621
1sin
arg =+-=a a m θ求出7.15=a 。跟据系统对相角裕度的要求,确定校正后系统的截止频率'c ω,由式10lg )(lg 20'c W A +α=0,由此可求得02.3c ='ω计算校正装置的时间常数T 。 由于a T W W m c 1
'==,由此可以解出T=.
则校正装置的传递函数为()1084.01
3188.1s G c ++=s s
二次校正系统分析
如图6所示相角裕度o r 407.18<=,可知相角裕度不满足要求,由此考虑在次加入串联超前校正系统进行二次校正。
故需要加入m θ='γ-[γ-(??12~5)]=o 50-[?7.18-(??12~5)], 然后再根据4.431
1sin arg =+-=a a m θ求出365.5=a 。 跟据系统对相角裕度的要求,确定校正后系统的截止频率"c ω
,由式10lg )''(lg 20c W A +α=0,由此可求得7.4''c =ω
计算校正装置的时间常数T 。 由于a
T W W m c 1''==,由此可以解出T=. 则二次校正装置的传递函数为()1092.0149.0s "G c ++=
s s 校正后的传递函数为:
)
1092.0)(1084.0)(1001.0)(16.0)(1()149.0)(13188.1(5)(+++++++=s s s s s s s s G 如图7所示,由图可知h=,ο8.43=γ满足系统要求
在设计超前校正装置校正时,要合理选择校正装置的参数,一般可以改善系统的动态性能。从频率特性角度出发,可以利用将较高频段幅值下降20lg α、相位幅度较小的特性,减小系统的截止频率,提高相角裕度,从而提高了系统的稳定性。但同时我们也应认识到串联校正装置本身所存在的缺陷和不足,以更好的把它应用于工程设计中。
如果在未校正系统的截止频率c ω附近,相频特性的变化率很大,即相角减小得很快,则采用单级串联校正效果将不大,这是因为随着校正后的截止频率'c
ω向高频段的移动,相角在c ω附近将减小得很快,于是在新的截止频率上便很难
得到足够大的相裕量。在工程实践中一般不希望a 值很大,当a =20时,最大超
前角?=60m ?,如果需要60°以上的超前相角时,可以考虑采用两个或两个以上的串联超前校正网络由隔离放大器串联在一起使用。在这种情况下,串联超前校正提供的总超前相角等于各单独超前校正网络提供的超前相角之和。
(2)校正前系统的bode图
图2 (3)校正后系统的Bode图
图6 (4)二次校正后系统的Bode图
图7
工程控制基础课程实验课前预习 电子科技大学机械电子工程学院
目录 实验一二阶系统时频域分析实验 (2) 实验二频域法串联超前校正 (4) 实验三直流电机PID控制 (7)
实验一 二阶系统时频域分析实验 一. 实验目的 通过二阶系统的时频域分析验证课程讲授内容,加深学生对理论知识的理解程度,扩大学生视野,掌握基本的频域图解方法和时域系统校正方法。 二. 系统模拟电路图 二阶闭环系统时域分析模拟电路如图1-2所示。它由积分环节(A2单元)和惯性环节(A3单元)的构成,其积分时间常数T i =R 1*C 1=1秒,惯性时间常数 T =R 2*C 2=0.1秒。 图1-2 Ⅰ型二阶闭环系统时域特性测试模拟电路 模拟电路的各环节参数代入,得到该电路的开环传递函数为: 2100()(1)(0.11) i R K K k G s K T s Ts s s R R = = = = ++其中, 模拟电路的开环传递函数代入式,得到该电路的闭环传递函数为: K s s K s s s n n n 1010102)(2222++=++=ωξωωφ 30.6s n t ξω==秒 0.21p t == ⒈ 二阶系统时域分析 改变可变电阻R 的阻值,就可改变阻尼比和开环增益K ,分析该系统临界阻尼响应,欠阻尼响应,过阻尼响应时R 的取值。计算欠阻尼二阶闭环系统在 阶跃信号输入时的动态指标M p 、t p 、t s :(K =25、=0.316ξ、15.8n ω=) ⒉ 二阶系统频域分析 由于Ⅰ型系统含有一个积分环节,它在开环时响应曲线是发散的,因此欲获得其开环频率特性时,还是需构建成闭环系统,测试其闭环频率特性,然后通过公式换算,获得其开环频率特性。频率分析所用的模拟电路如图1-3所示。频率分析所用的模拟电路与时域分析所用的模拟电路的区别在于:输入信号不同。
天津城市建设学院 课程设计任务书 2010 —2011 学年第 2 学期 电子与信息工程 系 电气工程及其自动化 专业 08-1 班级 课程设计名称: 自动控制原理课程设计 设计题目: 串联超前校正装置的设计 完成期限:自 2011 年5 月 30 日至 2011 年 6 月 3 日共 1 周 设计依据、要求及主要内容: 已知单位反馈系统的开环传递函数为:) 104.0(100)(+= s s K s G 要求校正后系统对单位斜坡输入信号的稳态误差01.0≤ss e ,相角裕度 45≥γ,试设计串联超前校正装置。 基本要求: 1、对原系统进行分析,绘制原系统的单位阶跃响应曲线, 2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。 3、绘制原系统的Nyquist 曲线。 4、绘制原系统的根轨迹。 5、设计校正装置,绘制校正装置的Bode 图。 6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。 7、绘制校正后系统的单位阶跃响应曲线。 8、绘制校正后系统的Nyquist 曲线。 9、绘制校正后系统的根轨迹。 指导教师(签字): 教研室主任(签字): 批准日期:2011年5月28日
目录 一、绪论 (2) 二、对原系统进行分析 (3) 1)绘制原系统的单位阶跃曲线 (3) 2)绘制原系统bode图 (3) 3)绘制原系统奈式曲线 (4) 4)绘制原系统根轨迹 (4) 三、校正系统的确定 (5) 四、对校正后的装置进行分析 (5) 1)绘制校正后系统bode图 (5) 2)绘制校正后系统单位阶跃响应曲线 (6) 3)绘制校正后的奈式曲线 (7) 4)绘制校正后的根轨迹 (7) 五、总结 (8) 六、附图 (9) 参考文献 (15)
学号09750201 (自动控制原理课程设计) 设计说明书 串联滞后校正装置的设计起止日期:2012 年 5 月28 日至2012 年 6 月1 日 学生姓名安从源 班级09电气2班 成绩 指导教师(签字) 控制与机械工程学院 2012年6 月1 日
天津城市建设学院 课程设计任务书 2011 —2012 学年第 2 学期 控制与机械工程 学院 电气工程及其自动化 系 09-2 班级 课程设计名称: 自动控制原理课程设计 设计题目: 串联滞后校正装置的设计 完成期限:自 2012 年 5 月 28 日至 2012 年 6 月 1 日共 1 周 设计依据、要求及主要内容: 设单位反馈系统的开环传递函数为:) 2()(+= s s K s G 要求系统的速度误差系数为120-≥s K v ,相角裕度 45≥γ,试设计串联滞后校正装置。 基本要求: 1、对原系统进行分析,绘制原系统的单位阶跃响应曲线, 2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。 3、绘制原系统的Nyquist 曲线。 4、绘制原系统的根轨迹。 5、设计校正装置,绘制校正装置的Bode 图。 6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。 7、绘制校正后系统的单位阶跃响应曲线。 8、绘制校正后系统的Nyquist 曲线。 9、绘制校正后系统的根轨迹。 指导教师(签字): 系主任(签字): 批准日期:2012年5月25日
目录 一、绪论 (4) 二、原系统分析 (5) 2.1原系统的单位阶跃响应曲线 (5) 2.2 原系统的Bode图 (5) 2.3 原系统的Nyquist曲线 (5) 2.4 原系统的根轨迹 (5) 三、校正装置设计 (5) 3.1 校正装置参数的确定 (5) 四、校正后系统的分析 (6) 4.1校正后系统的单位阶跃响应曲线 (6) 4.2 校正后系统的Bode图 (6) 4.3 校正后系统的Nyquist曲线 (6) 4.4 校正后系统的根轨迹 (6) 五、总结 (7) 六、参考文献 (7) 七、附图 (8)
系统的滞后超前频域法校正 1 设计目的 通过课程设计熟悉频域法分析系统的方法原理。 通过课程设计掌握滞后-超前校正作用与原理。 通过在实际电路中校正设计的运用,理解系统校正在实际中的意义。 2设计任务 控制系统为单位负反馈系统,开环传递函数为G(s)=180/[s(s/6+1)(s/2+1)],设计校正装置,使系统满足下列性能指标:相角裕量45+-3度;幅值裕量不低于10db;调节时间不超过3s. 3 具体要求 1)使用MATLAB进行系统仿真分析与设计,并给出系统校正前后的MATLAB仿真结果,同时使用Simulink仿真验证。 2)使用EDA工具EWB搭建系统的模拟实现电路,分别演示并验证校正前和校正后的效果。3)在实验箱上搭建实际电路,验证系统设计结果。 4 设计原理概述 校正方式的选择。按照校正装置在系统中的链接方式,控制系统校正方式分为串联校正、反馈校正、前馈校正和复合校正4种。串联校正是最常用的一种校正方式,这种方式经济,且设计简单,易于实现,在实际应用中多采用这种校正方式。串联校正方式是校正器宇受控对象进行串联链接的。本设计按照要求将采用串联校正方式进行校正。 校正方法的选择。根据控制系统的性能指标表达方式可以进行校正方法的确定。本设计要求以频域指标的形式给出,因此采用基于Bode图的频域法进行校正。 几种串联校正简述。串联校正可分为串联超前校正、串联滞后校正和滞后-超前校正等。 超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提下,提高系统的动态性能。通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。一般使校正环节的最大相位超前角出现在系统新的穿越频率点。 滞后校正通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。 滞后-超前校正适用于对校正后系统的动态和静态性能有更多更高要求的场合。施加滞后-超前校正环节,主要是利用其超前部分增大系统的相位裕度,以改善系统的动态性能;利用其滞后部分改善系统的静态性能。 设计步骤如下: 1)根据静态性能指标,计算开环系统的增益。之后求取校正前系统的频率特性指标,并与 设计要求进行比较。 2)确定校正后期望的穿越频率,具体值的选取与所选择的校正方式相适应。 3)根据待设计的校正环节的形式和转折频率,计算相关参数,进而确定校正环节。 4)得出校正后系统。检验系统满足设计要求。如不满足则从第二步重新开始。 在MA TLAB中基于Bode图进行系统设计的基本思路是通过比较校正后的频率特性。尝试选定合适的校正环节,根据不同的设计原理,确定校正环节参数。最后对校正后的系统进行检验,并反复设计直至满足要求。 五设计方案及分析 1 观察原系统性能指标 1)使用MATLAB编写程序观察原系统的频率特性及阶跃响应。 程序如下:
自动控制原理课程设计报告 学院:信息工程学院 班级:自动化-2 姓名:闫伟 学号:1105130201 地点:电信实验 指导教师:崔新忠
目录 一.设计要求 (3) 二.设计目的 (3) 三.设计内容 (3) 3.1设计思路 (3) 3.2设计步骤 (4) 3.2.1.确定系统的开环增益 (4) 3.2.2.求出系统的相角裕度 (4) 3.2.3.确定超前相角.................. .. (4) 3.2.4.求出校正装置的参数 (4) 3.2.5.校正后系统的开环剪切频率 (4) 3.2.6.确定超前校正装置的传递函数 (5) 3.2.7.确定校正后系统的开环传递函数 (5) 3.2.8.检验系统的性能指标 (5) 五.Matlab 程序及其运行结果 (6) 4.1绘制校前正后的bode图.......... . (7) 4.2绘制校前正后的Nyquist图 (7) 4.3绘制校前正后的单位阶跃响应曲线 (7) 五.课程设计总结 (10) 六.参考文献 (11)
自动控制原理课程设计 一. 设计要求: 已知单位反馈系统开环传递函数如下: ()()() 10.110.3O k G s s s s = ++ 试设计超前校正环节,使其校正后系统的静态速度误差系数 6v K ≤,相角裕度为45 度,并绘制校正前后系统的单位阶跃响应曲线,开环Bode 图和闭环Nyquist 图。 二. 设计目的: 1.通过课程设计使学生更进一步掌握自动控制原理课程的有关知识,加深对内涵的理解,提高解决实际问题的能力。 2.理解自动控制原理中的关于开环传递函数,闭环传递函数的概念以及二者之间的区别和联系。 3.理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统。 4.理解在校正过程中的静态速度误差系数,相角裕度,截止频率,超前(滞后)角频率,分度系数,时间常数等参数。 5.学习MATLAB 在自动控制中的应用,会利用MATLAB 提供的函数求出所需要得到的实验结果。 6.从总体上把握对系统进行校正的思路,能够将理论操作联系实际、运用于实际。 三. 设计内容: 3.1设计思路: 频域法中的超前校正是利用校正装置的超前相位在穿越频率处对系统进行相位补偿,以提高系统的相位稳定裕量,同时也提高了穿越频率值,从而改善系统的稳定性快速性。串联超前校正主要适用于稳定精度不需要改变(即稳态性能较好),动态性能不佳,而穿越频率附近相位变化平稳的系统。
2016届毕业(设计)论文 题目基于频域的校正方法及实验设计 专业班级过程自动化 学号 1204160134 学生姓名于春明 第一指导教师陈杰 指导教师职称 学院名称电气信息院 完成日期: 2016年 5月 20日
基于频域的校正方法及实验设计 Correction Method and Experimental Design based on Frequency Domain 学生姓名于春明 第一指导教师陈杰
摘要 在经典控制理论中,系统校正设计,就是在给定的性能指标下,对于给定的对象模型,确定一个能够完成系统满足的静态与动态性能指标要求的控制器,即确定校正器的结构与参数。串联校正控制器的频域设计方法中,使用的校正器有超前校正器、滞后校正器、滞后-超前校正器等。超前校正设计方法的特点是校正后系统的截止频率比校正前的大,系统的快速性能得到提高,这种校正设计方法对于要求稳定性好、超调量小以及动态过程响应快的系统被经常采用。滞后校正设计方法的特点是校正后系统的截止频率比校正前的小,系统的快速性能变差,但系统的稳定性能却得到提高,因此,在系统快速性要求不是很高,而稳定性与稳态精度要求很高的场合,滞后校正设计方法比较适合。滞后-超前校正设计是指既有滞后校正作用又有超前校正作用的校正器设计。它既具有了滞后校正高稳定性能、高精确度的好处,又具有超前校正响应快、超调小的优点,这种设计方法在要求较高的场合经常被采用。 关键词:
ABSTRACT In classical control theory, system design correction, that is, given the performance for a given object model to determine a controller to complete the system meets the static and dynamic performance requirements, namely to determine the structure and corrector parameter. Frequency Domain controller series corrected using correction has lead corrector corrector lag lag - lead Corrector like. Features advanced design correction method is to correct the system cut-off frequency than the fast performance is improved before the correction is large, the system, this correction method for design requires good stability, small overshoot and dynamic process of rapid response systems are often use. Lag compensation design approach is characterized by system after correcting the cutoff frequency than the fast performance before correction is small, the system is deteriorated but stable performance of the system has improved, therefore, the system speed requirements are not high, and the stability and steady-state high precision of the occasion, lag compensation design method is more suitable. Lag - lead Corrector design means there are both lagging corrective action ahead of corrective action calibration designs. It has a lag correction high stability, high accuracy advantages, but also has the leading correction fast response, small overshoot of the advantages of this design approach in demanding situations are often used. Keywords:
课程设计任务书 院部名称机电工程学院 专业自动化 班级 M11自动化 指导教师陈丽换 金陵科技学院教务处制
摘要 MATLAB是一个包含大量计算算法的集合。其拥有600多个工程中要用到的数学运算函数,可以方便的实现用户所需的各种计算功能。函数中所使用的算法都是科研和工程计算中的最新研究成果,而前经过了各种优化和容错处理。在通常情况下,可以用它来代替底层编程语言,如C和C++ 。在计算要求相同的情况下,使用MATLAB的编程工作量会大大减少。MATLAB的这些函数集包括从最简单最基本的函数到诸如矩阵,特征向量、快速傅立叶变换的复杂函数。函数所能解决的问题其大致包括矩阵运算和线性方程组的求解、微分方程及偏微分方程的组的求解、符号运算、傅立叶变换和数据的统计分析、工程中的优化问题、稀疏矩阵运算、复数的各种运算、三角函数和其他初等数学运算、多维数组操作以及建模动态仿真等。 此次课程设计就是利用MATLAB对一单位反馈系统进行滞后-超前校正。通过运用MATLAB的相关功能,绘制系统校正前后的伯德图、根轨迹和阶跃响应曲线,,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试。 关键字:超前-滞后校正 MATLAB 仿真
1.课程设计应达到的目的 1. 掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。 2. 学会使用MATLAB 语言及Simulink 动态仿真工具进行系统仿真与调试。 2.课程设计题目及要求 题目: 已知单位负反馈系统的开环传递函数, 试用频率法设计串 联滞后——超前校正装置,使之满足在单位斜坡作用下,系统的速度误差系数1v K 10s -=,系统的相角裕量045γ≥,校正后的剪切频率 1.5C rad s ω≥。 设计要求: 1. 首先, 根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T ,α等的值。 2.. 利用MATLAB 函数求出校正前与校正后系统的特征根,并判断其系统是否 稳 定 , 为 什 么 ? 3. 利用MATLAB 作出系统校正前与校正后的单位脉冲响应曲线,单位阶跃响应曲线,单位斜坡响应曲线,分析这三种曲线的关系。求出系统校正前与校正后的动态性能指标σ%、tr 、tp 、ts 以及稳态误差的值,并分析其有何变化。 4. 绘制系统校正前与校正后的根轨迹图,并求其分离点、汇合点及与虚轴 交点的坐标和相应点的增益K *值,得出系统稳定时增益K * 的变化范围。绘制系 统校正前与校正后的Nyquist 图,判断系统的稳定性,并说明理由。 5. 绘制系统校正前与校正后的Bode 图,计算系统的幅值裕量,相位裕量,幅值穿越频率和相位穿越频率。判断系统的稳定性,并说明理由。 ()(1)(2) K G S S S S = ++
课题:串联超前滞后校正装置专业:电气工程及其自动化班级:一班 学号: 姓名: 指导教师: 设计日期:2013.12.6-2013.12.12成绩:
自动控制原理课程设计报告 一、设计目的 () (1)掌握控制系统设计与校正的步骤和方法。 (2)掌握对控制系统相角裕度、稳态误差、剪切频率、相角穿越频率以及增益裕度的求取方法。 (3)掌握利用Matlab对控制系统分析的技能。熟悉MATLAB这一解决具体工程问题的标准软件,能熟练地应用MATLAB软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。 (4)提高控制系统设计和分析能力。 (5)所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。校正方案主要有串联校正、并联校正、反馈校正和前馈校正。确定校正装置的结构和参数的方法主要有两类,分析法和综合法。分析法是针对被校正系统的性能和给定的性能指标,首先选择合适的校正环节的结构,然后用校正方法确定校正环节的参数。在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正和滞后-超前校正这三种类型。超前校正通常可以改善控制系统的快速性和超调量,但增加了带宽,而滞后校正可以改善超调量及相对稳定度,但往往会因带宽减小而使快速性下降。滞后-超前校正兼用两者优点,并在结构设计时设法限制它们的缺点。 二、设计要求(姬松) 1.前期基础知识,主要包括MATLAB系统要素,MATLAB语言的变量与语句,MATLAB的矩阵和矩阵元素,数值输入与输出格式,MATLAB系统工作空间信息,以及MATLAB的在线帮助功能等。 2.控制系统模型,主要包括模型建立、模型变换、模型简化,Laplace变换等等。 3.控制系统的时域分析,主要包括系统的各种响应、性能指标的获取、零
电子与电气工程学院 课程设计报告 课程名称自动控制原理 设计题目串联超前校正装置的设计所学专业名称自动化 班级自动化133 学号2013211269 学生姓名 指导教师华贵山 2015年12月26日
电气学院 自动控制原理 课程设计 任 务 书 设计名称: 串联超前校正装置的设计 学生姓名: 指导教师: 华贵山 起止时间:自 2015 年 12 月 13 日起 至 2015 年 12 月 26 日止 一、课程设计目的 1、通过课程设计进一步掌握自动控制原理课程的有关知识,加深对所学内容的理解,提高解决实际问题的能力。 2、理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统。 3、了解控制系统设计的一般方法、步骤。 4、从总体上把握对系统进行校正的思路,能够将理论运用于实际。 二、课程设计任务和基本要求 设计任务: 已知单位反馈系统的开环传递函数为:) 104.0(100)(+= s s K s G 要求校正后系统对单位斜坡输入信号的稳态误差01.0≤ss e ,相角裕度 o 45≥γ,试设计串联超前校正装置。 基本要求: 1、对原系统进行分析,绘制原系统的单位阶跃响应曲线,
2、绘制原系统的Bode图,确定原系统的幅值裕度和相角裕度。 3、绘制原系统的Nyquist曲线。 4、绘制原系统的根轨迹。 5、设计校正装置,绘制校正装置的Bode图。 6、绘制校正后系统的Bode图、确定校正后系统的幅值裕度和相角裕度。 7、绘制校正后系统的单位阶跃响应曲线。 8、绘制校正后系统的Nyquist曲线。 9、绘制校正后系统的根轨迹。
课程设计任务书 2012 —2013 学年第 1 学期 电子与信息工程 系 电气工程及其自动化 专业 10-1 班级 课程设计名称: 自动控制原理课程设计 设计题目: 串联超前校正装置的设计 完成期限:自 2012 年12 月 10 日至 2012 年 12 月 14 日共 1 周 设计依据、要求及主要内容: 设单位反馈系统的开环传递函数为:) 1001.0)(16.0)(1(5 )(+++= s s s s s G 要求校正后系统的幅值裕度大于10dB ,相角裕度 40≥γ,试设计串联超前校正装置。 基本要求: 1、对原系统进行分析,绘制原系统的单位阶跃响应曲线, 2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。 3、绘制原系统的Nyquist 曲线。 4、绘制原系统的根轨迹。 5、设计校正装置,绘制校正装置的Bode 图。 6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。 7、绘制校正后系统的单位阶跃响应曲线。 8、绘制校正后系统的Nyquist 曲线。 9、绘制校正后系统的根轨迹。 指导教师(签字): 教研室主任(签字): 批准日期:2012年12月8日
目录 一、绪论 (3) 二、原系统分析 (5) 2.1 原系统的单位阶跃响应曲线 (5) 2.2 原系统的Bode图 (5) 2.3 原系统的Nyquist曲线 (6) 2.4 原系统的根轨迹 (6) 三、校正装置设计 (7) 3.1 校正装置参数的确定 (7) 3.2 校正装置的Bode图 (7) 四、校正后系统的分析 (7) 4.1 校正后系统的Bode图 (8) 4.2 二次校正系统分析 (8) 五、二次校正后系统的分析 (8) 5.1二次校正后系统的Bode图 (9) 5.2校正后系统的单位阶跃响应曲线 (9) 5.3 校正后系统的Nyquist曲线 (9) 5.4 校正后系统的根轨迹 (10) 六、总结 (10) 七、附图 (11) 七、参考文献 (16)
课程设计报告 题 目 用频率法设计串联超前校正装置 课 程 名 称 自动控制原理 院 部 名 称 机电工程学院 专 业 自动化 班 级 12自动化2班 学 生 姓 名 学 号 课程设计地点 C214 课程设计学时 1周 指 导 教 师 陈丽换 金陵科技学院教务处制
目录 一、设计目的 (1) 二、设计的内容、题目与要求 (1) 2.1 设计的内容 (1) 2.2 设计的条件 (1) 2.2 设计的要求 (1) 2.2 设计的题目 (2) 三、设计原理 (2) 四、设计的方法与步骤 (3) 4.1 分析校正前的传递函数 (3) 4.1.1 求开环增益 K (3) 4.1.2 求校正前闭环系统特征根 (3) 4.1.3 绘制校正前Bode图判断系统稳定性 (3) 4.2 求解串联超前校正装置 (4) 4.2.1 一次校正系统分析 (4) 4.2.2 二次校正系统分析 (6) 4.3 分析校正后的传递函数 (6) 4.3.1 求校正后闭环系统特征根 (6) 4.3.2 绘制校正后的Bode图判断系统稳定性 (7) 4.4 求校正前后各种响应 (8) 4.5 求校正前后的各种性能指标 (13) 4.6 绘制系统校正前后的根轨迹图 (14)
4.7 绘制系统校正前后Nyquist图判断系统稳定性 (16) 五、课程设计心得体会 (18) 六、参考文献 (19) \
一、设计目的 1、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。 2、学会使用MATLAB 语言及Simulink 动态仿真工具进行系统仿真与调试。 二、设计内容、题目与要求 2.1设计内容: 1、查阅相关书籍材料并学习使用Mutlab 软件 2、对系统进行稳定性分析、稳态误差分析以及动态特性分析 3、绘制根轨迹图、Bode 图、Nyquist 图 4、设计校正系统以满足设计要求 2.2设计条件: 已知单位负反馈系统被控制对象的传递函数为 m m 1m 2012m n n 1n 2012n b b b b ()s s s G s a s a s a s a ----+++ += +++ + (n m ≥)。 参数n 210a ,a ,a ,a 和m 210b ,b ,b ,b 以及性能指标要求 2.3设计要求: 1、首先, 根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T ,α等的值。 2、利用MATLAB 函数求出校正前与校正后系统的特征根,并判断其系统是否稳定,为什么? 3、利用MATLAB 作出系统校正前与校正后的单位脉冲响应曲线,单位阶跃响应曲线,单位斜坡响应曲线,分析这三种曲线的关系?求出系统校正前与校正后 的动态性能指标σ%、tr 、tp 、ts 以及稳态误差的值,并分析其有何变化? 4、绘制系统校正前与校正后的根轨迹图,并求其分离点、汇合点及与虚轴交点的坐标和相应点的增益K * 值,得出系统稳定时增益K * 的变化范围。绘制系统校正前与校正后的Nyquist 图,判断系统的稳定性,并说明理由?
自动控制原理课程设计 一. 设计题目 1.掌握控制系统的设计与校正方法、步骤。 2.掌握对控制系统的相角裕度、稳态误差、截止频率和动态性能分析。 3.掌握利用matlab 对控制理论内容进行分析。 4.提高大家分析问题解决问题的能力。 二. 题目任务及要求 题目1:已知单位负反馈系统被控制对象的开环传递函数 ()() 10+=s s K s G 用串联校正的频率域方法对系统进行串联校正设计。 任务:用串联校正的频率域方法对系统进行串联校正设计,使系统满足如下动态 及静态性能指标: (1)在单位斜坡信号作用下,系统的稳态误差rad e ss 15 1< ; (2)系统校正后,相位裕量 45≥γ。 (3)截止频率s rad c /5.7≥ω。 设单位负反馈系统的开环传递函数为 ) 1()(+=s s K s G 用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能: (1) 相角裕度045≥γ; (2) 在单位斜坡输入下的稳态误差为1.0=ss e ; (3) 系统的剪切频率wc <4.4rad/s 。 (4)模值余度h ≥10dB k=10;
num1=[1]; den1=conv([1 0],[1 1]); sys1=tf(k*num1,den1); figure(1); Margin(sys1); hold on figure(2); sys=feedback(sys1,1) step(sys) Transfer function: 10 ------- s^2 + s
未校正前的Bode图 未校正前的的阶跃响应曲线 由图可以看出未经校正的Bode图及其性能指标,还有如图(-2)所示的未校正的系统的阶跃响应曲线。由图(-1)可以看出系统的: 模值稳定余度; h=∞dB; -pi穿越频率:Wg=∞dB; 相角稳定余度为γ=180剪切频率:Wc=3.08rad/s; 由图(-1)可以知道,系统校正前,相角稳定余度=18<45。为满足要求,开环系剪切频率wc=3.08rad/s<4.4rad/s。也未能满足要求。其阶跃曲线如图(-2)其超调量竟达σ%=60%,固原系统需要矫正。 Transfer function: 10 ------------ s^2 + s + 10 h = Inf r = 17.9642 wx = Inf
完成一个控制系统的设计任务,往往需要经过理论和实践的反复比较才可以 得到比较合理的结构形式和满意的性能,在用分析法进行串联校正时,校正环节 的结构通常采用超前校正、滞后校正、超前滞后校正这三种类型,也就是工程上 常用的PID 调节器。本次课设采用的超前超前校正的基本原理是利用超前相角 补偿系统的滞后相角,改善系统的动态性能,如增加相角裕度,提高系统稳定性 能等,而由于计算机技术的发展,matlab 在控制器设计,仿真和分析方面得到 广泛应用。本次课设采用用Matlab 软件对系统进行了计算机仿真,分析未校正 系统的动态性能和超前校正后系统是否满足相应动态性能要求。 超前校正就是在前向通道中串联传递函数为: ()()()1 11G c ++?==Ts aTs a s R s C s 其中: C R R R R T 2 121+= 1221>+= R R R a 通常 a 为分度系数,T 叫时间常数,由式(2-1)可知,采用无源超前网络进行 串联校正 时,整个系统的开环增益要下降 a 倍,因此需要提高放大器增益交易 补偿. 如果对无源超前网络传递函数的衰减由放大器增 益所补偿,则 ()1 1++=Ts aTs s aG c 上式称为超前校正装置的传递函数。无源超前校正网络的对数频率特性如图6-4。 图6-4无源超前校正网络的对数频率特性 显然,超前校正对频率在1/aT 和1/T 之间的输入信号有微分作用,在该频 率范围内,输出信号相角比输入信号相角超前,超前网络的名称由此而得。因此
超前校正的基本原理就是利用超前相角补偿系统的滞后相角,改善系统的动态性 能,如增加相位裕度,提高系统的稳定性等。 下面先求取超前校正的最大超前相角m ?及取得最大超前相角的频率m ω,则像 频特性: ()ω?c =arctanaT ω-arctanT ω ()()()221T 1d ωωω?ωT T a aT d c +-+= 当(),0=ω?ωd d e 则有: T a m 1= ω 从而有: a a T a T T a aT 1arctan arctan 1arctan 1arctan m -=-=? =11arcsin 21arctan 111arctan +-=-=+-a a a a a a a a 既当T a m 1=ω时,超前相角最大为11arcsin m +-=a a ?,可以看出m ?只与a 有关这一点对于超前校正是相当重要的 超前校正RC 网络图如图2。 图2超前校正RC 网络图 利用超前网络进行串联校正的基本原理,乃是利用超前网络相角超前特性。 只要正确地将超前网络的交接频率1/aT 和1/T 设置在待校正系统截止频率c ω的
学号 (自动控制原理课程设计) 设计说明书 串联滞后校正装置的设计起止日期:2012 年5 月28 日至2012 年6 月1 日 学生姓名 班级09电气1班 成绩 指导教师(签字) 控制与机械工程学院 2012年6 月1 日
天津城市建设学院 课程设计任务书 2011 —2012 学年第 2 学期 控制与机械工程 学院 电气工程及其自动化 系 09-1 班级 课程设计名称: 自动控制原理课程设计 设计题目: 串联滞后校正装置的设计 完成期限:自 2012 年 5 月 28 日至 2012 年 6 月 1 日共 1 周 设计依据、要求及主要内容: 设单位反馈系统的开环传递函数为:) 13.0)(1()(++= s s s K s G 要求校正后系统的静态速度误差系数110-≥s K v ,相角裕度 45≥γ,试设计串联滞后校正装置。 基本要求: 1、对原系统进行分析,绘制原系统的单位阶跃响应曲线, 2、绘制原系统的Bode 图,确定原系统的幅值裕度和相角裕度。 3、绘制原系统的Nyquist 曲线。 4、绘制原系统的根轨迹。 5、设计校正装置,绘制校正装置的Bode 图。 6、绘制校正后系统的Bode 图、确定校正后系统的幅值裕度和相角裕度。 7、绘制校正后系统的单位阶跃响应曲线。 8、绘制校正后系统的Nyquist 曲线。 9、绘制校正后系统的根轨迹。 指导教师(签字): 系主任(签字): 批准日期:2012年5月25日
目录 一、绪论 (4) 二、原系统分析 (4) 2.1原系统的单位阶跃响应曲线 (4) 2.2绘制原系统的Bode图,确定原系统的幅值裕度和相角裕度 (5) 2.3 原系统的Nyquist曲线 (6) 2.4 原系统的根轨迹 (7) 三、校正装置设计 (8) 3.1 校正装置参数的确定 (8) 3.2 校正装置的Bode图 (8) 四、校正后系统的分析 (9) 4.1校正后系统的单位阶跃响应曲线 (9) 4.2 校正后系统的Bode图 (9) 4.3 校正后系统的Nyquist曲线 (10) 4.4 校正后系统的根轨迹 (11) 五、总结 (12) 六、附图 (12)
实验五-频域法串联超前校正 实验报告 课程名称________ 控制工稈基础___________ 实验项目实验五频域法串联超前校正 专业电子科学与技术班级一 姓名______________________ 学号_________________ 指导教师_________________ 实验成绩 ______________
2014年6月1 2日 实验五频域法串联超前校正 、实验目的 1 ?了解和掌握二阶系统中的闭环和开环对数幅频特性和相频特性(波德图) 的构造及绘制方法。 2?了解和掌握超前校正的原理,及超前校正网络的参数的计算。 3?熟练掌握使用本实验机的二阶系统开环对数幅频特性和相频特性的测试方法。 4.观察和分析系统未校正和串联超前校正后的开环对数幅频特性L()和相 频特性(),幅值穿越频率处①c',相位裕度丫,并与理论计算值作比对。 二、实验仪器 PC机一台,实验箱 三、实验内容及操作步骤 1、未校正系统的频域特性的测试 本实验将数/模转换器(B2 )单元作为信号发生器,自动产生的超低频正弦信号的频率从低到高变化(0.5Hz~16Hz), 0UT2输出施加于被测系统的输入端r(t),然后分别测量被测系统的输出信号的对数幅值和相位,数据经相关运算后在虚拟示波器中显示。未校正系统频域特性测试的模拟电路图见图 图2 未校正系统频域特性测试的模拟电路图 实验步骤: (1)将数/模转换器(B2)输出0UT2作为被测系统的输入。 (2)构造模拟电路:按图3-3-4安置短路套及测孔联线,在《1。未校正系统时域特性的测试》的联线表上增加频率特性测试模块,表如下。
“自控原理课程设计”参考设计流程 一、理论分析设计 1、确定原系统数学模型; 当开关S断开时,求原模拟电路的开环传递函数个G(s)。 c);ω(γc、ω2、绘制原系统对数频率特性,确定原系统性能: 3、确定校正装置传递函数Gc(s),并验算设计结果; 设超前校正装置传递函数为: ,rd>1 ),则:'cω处的对数幅值为L('cωm,原系统在ω='cω若校正后系统的截止频率 由此得: 由,得时间常数T为: 4、在同一坐标系里,绘制校正前、后、校正装置对数频率特性; 二、Matlab仿真设计(串联超前校正仿真设计过程) 注意:下述仿真设计过程仅供参考,本设计与此有所不同。 利用Matlab进行仿真设计(校正),就是借助Matlab相关语句进行上述运算,完成以下任务:①确定校正装置;②绘制校正前、后、校正装置对数频率特性; ③确定校正后性能指标。从而达到利用Matlab辅助分析设计的目的。 例:已知单位反馈线性系统开环传递函数为: ≥450,幅值裕量h≥10dB,利用Matlab进行串联超前校正。'γ≥7.5弧度/秒,相位裕量'cω要求系统在单位斜坡输入信号作用时,开环截止频率 c)]、幅值裕量Gmω(γ1、绘制原系统对数频率特性,并求原系统幅值穿越频率wc、相位穿越频率wj、相位裕量Pm[即 num=[20]; den=[1,1,0]; G=tf(num,den); %求原系统传递函数 bode(G); %绘制原系统对数频率特性 margin(G); %求原系统相位裕度、幅值裕度、截止频率[Gm,Pm,wj,wc]=margin(G); grid; %绘制网格线(该条指令可有可无) 原系统伯德图如图1所示,其截止频率、相位裕量、幅值裕量从图中可见。另外,在MATLAB Workspace下,也可得到此值。由于截止频率和相位裕量都小于要求值,故采用串联超前校正较为合适。 图1 校正前系统伯德图 2、求校正装置Gc(s)(即Gc)传递函数 L=20*log10(20/(7.5*sqrt(7.5^2+1))); =7.5处的对数幅值L'cω%求原系统在
自动控制超前校正课程设计
大连海洋大学课程设计报告纸息工程专业班级:自动化09-1 姓名:学号:090513 自动化专业课程设计报告 《自动控制原理课程设计》 班级自动化09-1班 姓名 学号09051 时间2011-12-26 ~2011-12-30 地点电信实验中心软件机房19 指导教师邓长辉、崔新忠 大连海洋大学信息工程学院 自动化教研室
目录 一、课程设计的题目与要求 (1) 二、课程设计的目的 (1) 三、课程设计的内容与安排 (1) 四、课程设计的步骤 (1) 五、课程设计的心得与体会 (7) 六、参考文献 (8)
超前校正课程设计 一、 课程设计设计题目: 已知单位反馈系统开环传递函数如下: ()()()10.110.3O k G s s s s = ++ 试设计超前校正环节,使其校正后系统的静态速度误差系数 6v K ≤,相角裕度为45度,并绘制校正前后系统的单位阶跃响应曲线, 开环Bode 图和闭环Nyquist 图。 二、 课程设计目的 1. 通过课程设计使学生更进一步掌握自动控制原理课程的有关知识,加深 对内涵的理解,提高解决实际问题的能力。 2. 理解自动控制原理中的关于开环传递函数,闭环传递函数的概念以及二 者之间的区别和联系。 3. 理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到 最佳的系统。 4. 理解在校正过程中的静态速度误差系数,相角裕度,截止频率,超前(滞 后)角频率,分度系数,时间常数等参数。 5. 学习MATLAB 在自动控制中的应用,会利 用MATLAB 提供的函数求出所需要得到的实验结果。 三、课程设计的内容与安排 1. 布置任务书,查阅资料设计、计算(1天) 2. 程序设计、上机调试程序(3天) 3. 调试、验收,书写报告(0.5天) 4. 成绩评定(0.5天) 四、课程设计步骤 1. 设计思想: 设计一个串联超前校正环节,适当地选择参数a 和T,就可以使其校正后系统的静态速度误差系数,相角裕度等满足指标的要求,从而改善系统的动态性能。 2. 设计步骤:
目录 设计任务 (3) 设计要求 (3) 设计步骤 (3) 未校正前系统的性能分析 (3) 1.1开环增益 K (3) 1.2校正前系统的各种波形图 (4) 1.3由图可知校正前系统的频域性能指标 (7) 1.4特征根 (7) 1.5判断系统稳定性 (7) 1.6分析三种曲线的关系 (7) 1.7求出系统校正前动态性能指标及稳态误差 (7) 1.8绘制系统校正前的根轨迹图 (7) 1.9绘制系统校正前的Nyquist图 (9) 校正后的系统的性能分析 (10) 2.1滞后超前校正 (10) 2.2校正前系统的各种波形图 (11) 2.3由图可知校正前系统的频域性能指标 (15) 2.4特征根 (15) 2.5判断系统稳定性 (15) 2.6分析三种曲线的关系 (15) 2.7求出系统校正前动态性能指标及稳态误差 (15) 2.8绘制系统校正前的根轨迹图和Nyquist图 (16) 心得体会 (18) 主要参考文献 (18)
一、设计任务 已知单位负反馈系统的开环传递函数0 ()(0.11)(0.011) K G S S S S =++,试用频率 法设计串联滞后——超前校正装置。 (1)使系统的相位裕度045γ> (2)静态速度误差系数250/v K rad s ≥ (3)幅值穿越频率30/C rad s ω≥ 二、设计要求 (1)首先,根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T ,α等的值。 (2)利用MATLAB 函数求出校正前与校正后系统的特征根,并判断其系统是否稳定,为什么? (3)利用MATLAB 作出系统校正前与校正后的单位脉冲响应曲线,单位阶跃响应曲线,单位斜坡响应曲线,分析这三种曲线的关系?求出系统校正前与校正后的 动态性能指标σ%、tr 、tp 、ts 以及稳态误差的值,并分析其有何变化? (4)绘制系统校正前与校正后的根轨迹图,并求其分离点、汇合点及与虚轴交 点的坐标和相应点的增益K *值,得出系统稳定时增益K * 的变化范围。绘制系统校正前与校正后的Nyquist 图,判断系统的稳定性,并说明理由? (5)绘制系统校正前与校正后的Bode 图,计算系统的幅值裕量,相位裕量,幅值穿越频率和相位穿越频率。判断系统的稳定性,并说明理由? 三、设计步骤 开环传递函数0 ()(0.11)(0.011) K G S S S S = ++ 1、未校正前系统的性能分析 1.1开环增益0K 已知系统中只有一个积分环节,所以属于I 型系统 由静态速度误差系数 250/v K rad s ≥ 可选取 v K =600rad/s s rad K S S S K S S H S SG K s s V /600) 101.0)(11.0(lim )()(lim 00 ==++==→→