直流电机双闭环调速系统设计
(完整word版)双闭环不可逆直流调速系统课程设计

双闭环晶闸管不可逆直流调速系统设计一.设计目的一1了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。
2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。
3熟悉NMCL_18,NMCL_33的结构及调试方法。
4掌握双闭环不可逆直流调速系统的调试步骤,方法及参数的整定。
二.实验内容1 各控制单元调试2 测试电流反馈系数3 测定开环机械特性及闭环静特性三.实验系统组成及工作原理双闭环晶闸管不可逆直流调速系统有电流和转速两个调节器综合调节,由于调速系统调节的主要是转速,故转速环作为主环放在外面,电流环作为副环放在里面,这样可拟制电网电压波动对转速的影响,试验系统的组成如图6-8所示。
系统工作时,先给电动机加励磁,改变给定电压的大小即可方便的改变电机的转速。
ASR,ACR均有限幅环节,ASR的输出作为ACR的给定,利用ASR的输出限幅可达到限制启动电流的目的,ACR的输出作为移向触发电路的控制电压,利用ACR的输出限幅可达到限制和的目的。
当加入给定Ug后,ASR即饱和输出,使电动机以限定的最大起动电流加速启动,直到电机转速达到给定转速(即Ug=Ufn),并出现超调后,ASR退出饱和,最后稳定运行在略低于给定转速的数值上。
四.实验设备及仪器1,NMCL系统教学实验台主控制屏。
2,。
NMCL—18组件(适合NMCL—Ⅱ)或那么长了组件(适合NMCL—Ⅲ)。
3.NMCL—33组件或NMCL—53组件。
4.NMCL—03A三相可调电阻(或自配滑线变阻器)。
5.电机导轨及测速装置、直流发电机M01。
6.直流电动机M03。
五.注意事项1.三相主电压源连线时需注意,不可换错相序。
2.电源开关闭合时,过流保护,过压保护的发光二极管可能会亮,只需按下对应的复位开关SB1、SB2即可正常工作。
3.系统开环连接时,不允许突加给定信号Ug启动电机。
4.启动电机时,需吧MEL —13的测功机加载旋钮逆时针旋到底,以免带负载启动。
双闭环直流调速系统设计及仿真
双闭环直流调速系统设计及仿真一转速、电流双闭环控制系统一般来说,我们总希望在最大电流受限制的情况下,尽量发挥直流电动机的过载能力,使电力拖动控制系统以尽可能大的加速度起动,达到稳态转速后,电流应快速下降,保证输出转矩与负载转矩平衡,进入稳定运行状态[1]。
这种理想的起动过程如图1所示。
nnt图1 转速调节系统理想起动过程为实现在约束条件快速起动,关键是要有一个使电流保持在最大值的恒流过程。
根据反馈控制规律,要控制某个量,就要引入这个量的负反馈。
因此很自然地想到要采用电流负反馈控制过程。
这里实际提到了两个控制阶段。
起动过程中,电动机转速快速上升,而要保持电流恒定,只需电流负反馈;稳定运行过程中,要求转矩保持平衡,需使转速保持恒定,应以转速负反馈为主。
如何才能做到使电流、转速两种负反馈在不同的控制阶段发挥作用呢?答案是采用转速、电流双闭环控制系统。
如图2所示。
图2 双闭环直流调速控制系统原理图参考双闭环的结构图和一些电力电子的知识,采用机理分析法可以得到双闭环系统的动态结构图。
如图3所示。
图3 双闭环直流调速系统动态结构图在转速环、电流环的反馈通道和输入端增加了转速滤波、电流滤波和给定滤波环节。
因为电流检测信号中常含有交流成分,须加低通滤波,其滤波时间常数按需要而定。
滤波环节可以抑制检测信号中的交流分量,但同时也个反馈检测信号带来延迟。
所以在给定信号通道中加入一个给定滤波环节,使给定信号与反馈信号同步,并可使设计简化。
由测速发电机得到的转速反馈电压含有电机的换向纹波,因此也需要滤波,其时间常数用表示[2]。
二双闭环控制系统起动过程分析前面已经指出,设置双闭环控制的一个重要目的就是要获得接近于理想的起动过程,因此在分析双闭环调速系统的动态性能时,有必要先探讨它的起动过程。
双闭环调速系统突加给定电压由静止状态起动时,转速和电流的过渡过程如图4所示。
由于在起动过程中转速调节器ASR 经历了不饱和、饱和、退饱和三个阶段,整个过渡过程也就分为三个阶段,在图中表以Ⅰ、Ⅱ和Ⅲ。
双闭环直流电机调速系统设计综述

双闭环直流电机调速系统设计综述《自动控制系统论文设计报告》班级:自动化 09-1姓名:许丹阳学号:0918120123时间:2012年 5月 12号指导老师:丁丽娜大连海洋大学信息工程学院自动化研究所双闭环直流电机调速系统设计摘要转速、电流双闭环控制直流调速系统是性能很好、应用最广的直流调速系统。
依据晶闸管的特征,经过调理控制角α 大小来调理电压。
鉴于设计题目,直流电动机调速控制器选用了转速、电流双闭环调速控制电路。
在设计中调速系统的主电路采纳了三相全控桥整流电路来供电。
本文第一确定整个设计的方案和框图。
而后确定主电路的构造形式和各元零件的设计,同时对其参数的计算,包含整流变压器、晶闸管、电抗器和保护电路的参数计算。
接着驱动电路的设计包含触发电路和脉冲变压器的设计。
最后,即本文的要点设计直流电动机调速控制器电路,本文采纳转速、电流双闭环直流调速系统为对象来设计直流电动机调速控制器。
为了实现转速和电流两种负反应分别起作用,可在系统中设置两个调理器,分别调理转速和电流,即分别引入转速负反应和电流负反应,两者之间推行嵌套联接。
从闭环构造上看,电流环在里面,称作内环;转速环在外边,称做外环。
这就形成了转速、电流双闭环调速系统。
先确定其构造形式和设计各元零件,并对其参数的计算,包含给定电压、转速调理器、电流调理器、检测电路、触发电路和稳压电路的参数计算而后最后采纳MATLAB/SIMULINK 对整个调速系统进行了仿真剖析,最后画出了调速控制电路电气原理图。
要点词:双闭环;转速调理器;电流调理器目录一.绪论二 . 直流调速系统的方案设计2. 1. 12 . 2三.调理器的设计3. 1四.鉴于 MATLAB/SIMULINK的调速系统的仿真五.课程设计总结六.参照文件绪论直流调速系统的概括三十多年来,直流电机调速控制经历了重要的改革。
第一实现了整流器的更新换代,以晶闸管整流装置代替了惯用已久的直流发电机电动机组及水银整流装置使直流电气传动达成了一次大的跃进。
直流双闭环调速系统设计
摘要直流双闭环调速系统的性能很好,具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动系统中得到了广泛的应用。
直流双闭环调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流。
本文对直流双闭环调速系统的设计进行了分析,对直流双闭环调速系统的原理进行了一些说明,介绍了其主电路、检测电路的设计,详细介绍了电流调节器和转速调节器的设计以及一些参数的选择和计算,使其满足工程设计参数指标。
关键词:直流双闭环调速系统电流调节器转速调节器目录摘要 (I)1设计任务与分析 (1)2调速系统总体设计 (2)3直流双闭环调速系统电路设计 (3)3.1晶闸管-电动机主电路的设计 (3)3.1.1主电路设计 (3)3.1.2主电路参数计算 (4)3.2转速、电流调节器的设计 (5)3.2.1电流调节器 (5)3.2.1.1电流调节器设计 (5)3.2.1.2电流调节器参数选择 (6)3.2.2转速调节器 (8)3.2.2.1转速调节器设计 (8)3.2.2.2转速调节器参数选择 (8)3.3转速检测电路设计 (10)3.4电流检测电路设计 (10)4小结与体会 (11)5参考文献 (12)直流双闭环调速系统设计1设计任务与分析直流电动机具有良好的起、制动性能,宜于在大范围内实现平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流拖动控制系统又是交流拖动控制系统的基础,所以应该首先掌握直流拖动控制系统。
采用转速负反馈和PI调节器的单闭环直流调速系统是比较基础比较容易掌握的,它可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。
原因是因为在单闭环系统中不能随心所欲地控制电流和转矩的动态过程。
为了实现在允许条件下I的恒流过程,采用电流负反馈就的最快起动,关键是要获得一段使电流保持为最大值dm可以得到近似的恒流过程。
双闭环直流调速系统的设计
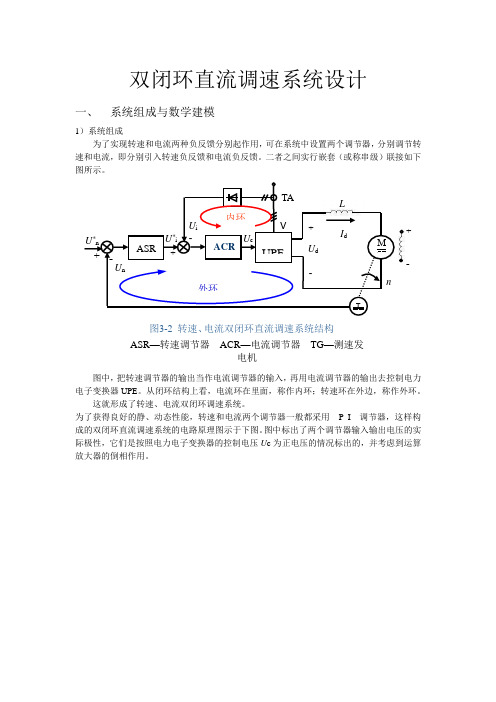
双闭环直流调速系统设计一、系统组成与数学建模1)系统组成为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。
二者之间实行嵌套(或称串级)联接如下图所示。
L+-图中,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
为了获得良好的静、动态性能,转速和电流两个调节器一般都采用P I 调节器,这样构成的双闭环直流调速系统的电路原理图示于下图。
图中标出了两个调节器输入输出电压的实际极性,它们是按照电力电子变换器的控制电压U c为正电压的情况标出的,并考虑到运算放大器的倒相作用。
2)数学建模图中W ASR(s)和W ACR(s)分别表示转速调节器和电流调节器的传递函数。
如果采用PI调节器,则有ss K s W i i iACR 1)(ττ+= ss K s W n n nASR 1)(ττ+=二、 设计方法采用工程设计法 1、设计方法的原则: (1)概念清楚、易懂; (2)计算公式简明、好记;双闭环直流调速系统的动态结构图(3)不仅给出参数计算的公式,而且指明参数调整的方向; (4)能考虑饱和非线性控制的情况,同样给出简单的计算公式; (5)适用于各种可以简化成典型系统的反馈控制系统。
2、工程设计方法的基本思路:(1)选择调节器结构,使系统典型化并满足稳定和稳态精度。
(2)设计调节器的参数,以满足动态性能指标的要求。
一般来说,许多控制系统的开环传递函数都可表示为∏∏==++=n1i irm1j j )1()1()(s T ss K s W τ上式中,分母中的 sr 项表示该系统在原点处有 r 重极点,或者说,系统含有 r 个积分环节。
根据 r=0,1,2,……等不同数值,分别称作0型、I 型、Ⅱ型、……系统。
基于MATLAB的直流电机双闭环调速系统设计
摘要直流电机双闭环调速系统是一个复杂的自动控制系统,是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都是比较成熟的系统,在拖动领域中发挥着极其重要的作用。
由于直流电机双闭环调速是各种电机调速系统的基础,本文从直流电机的基本特性进行双闭环直流电机设计,最后用实际系统进行工程设计,并采用MATLAB/SIMULINK进行仿真。
对于直流电机双闭环调速系统,在设计和调试过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难。
本文对直流电机双闭环调速系统进行辅助设计,选择调节器结构,进行参数计算和近似校验,根据给出和计算出的相应参数,建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和电流的仿真波形,并进行调试,使直流电机双闭环调速系统趋于完善、合理。
仿真结果证明了该方法的可行性和合理性。
关键词:直流调速,双闭环系统,电流调节器,转速调节器,计算机仿真AbstractThe double closed loop direct current velocity modulation system is a complex automatic control system, is in the present direct current velocity modulation system mainstream equipment, has the velocity modulation scope width, the stability is good, the steady fast precision higher merit, in the theory and the practice aspect all is the quite mature system, in drives in the domain to play the extremely vital role.Because the direct current machine double closed loop velocity modulation is each kind of electrical machinery velocity modulation system foundation, from the direct current machine basic characteristic conducts the double closed loop direct current machine design method research, finally uses the actual system to carry on the engineering design, and uses MATLAB/Simulink to carry on the simulation.Regarding the double closed loop direct current velocity modulation system, has the massive parameters in the design and the debugging process to need to calculate and to adjust, the utilization tradition design method work load is big, system debugging difficulty.This article carries on the assistance design to the double closed loop direct current velocity modulation system, chooses the regulator structure, carries on the parameter computation and the approximate verification, according to produces the corresponding parameter which and calculates, establishes applies the brake, the anti- electrical network voltage perturbation and the anti-load perturbation MATLAB/Simulink simulation model, the analysis rotational speed and the electric current simulation profile, and carries on the debugging, enable the double closed loop direct current velocity modulation system to tend to the consummation, is reasonable. The simulation result has proven this method feasibility and the rationality.Keywords:Speed control of DC-drivers,Double-closed-loop,Current regulator,Speed regulator,Computer simulation目录摘要 (I)Abstract........................................................... I I 目录........................................................... I II 1.绪论. (1)1.1 课题背景 (1)1.2 课题研究的目的和意义 (1)1.3 论文的主要内容 (2)2.直流电动机调速系统 (4)2.1 直流电动机简介 (4)2.1.1 直流电动机的工作原理 (4)2.1.2 直流电动机的运行特性 (5)2.1.3 直流电动机的起动与调速 (6)2.2 转速控制的要求和调速指标 (7)3.方案选择及系统工作原理 (9)3.1 电动机参数及设计要求 (9)3.2 方案选择及系统框图 (9)3.2.1 方案一:直流电机单闭环调速系统 (9)3.2.2 方案二:直流电机双闭环调速系统 (10)3.2.3 方案三:双闭环脉宽调速系统 (11)3.3 系统工作原理简介 (11)3.3.1 双闭环调速系统静态特性 (11)3.3.2 双闭环系统启动过程分析 (14)3.3.3 双闭环调速系统的动态抗扰动性能 (17)3.3.4 双闭环调速系统中两个调节器的作用 (18)4.双闭环调速系统的设计 (19)4.1 双闭环直流调速系统总体设计方案 (19)4.2 主电路设计与参数计算 (20)4.2.1 主电路原理图 (20)4.2.2 整流变压器的设计 (21)4.2.3 晶闸管元件选择 (23)4.2.4 电抗器参数的计算 (24)4.2.5 励磁电路 (26)4.2.6 三相桥式全控整流电路 (26)4.2.7 晶闸管触发电路 (28)4.3 直流调速系统的保护 (30)4.3.1 过电压保护 (30)4.3.2 电流保护 (33)4.4 控制电路设计 (34)4.4.1 电流调节器的设计 (35)4.4.2 转速调节器的设计 (37)5.调速系统的仿真 (40)5.1.1 MATLAB简介 (40)5.1.2 MATLAB的安装 (41)5.1.3 MATLAB的启动运行 (41)5.1.4 MATLAB的帮助文件 (41)5.1.5 MATLAB所定义的特殊变量及其意义 (41)5.1.6 MATLAB工具箱及SIMULINK简介 (42)5.2 调速系统仿真模型的建立 (43)5.3 仿真结果 (43)5.4 仿真结果分析 (46)结论 (47)参考文献 (48)致谢 (49)附录 A (50)1.绪论1.1 课题背景直流调速是现代电力拖动自动控制系统中发展较早的技术。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
双闭环直流电动机调速系统
04
系统软件设计
控制算法设计
算法选择
算法实现
根据系统需求,选择合适的控制算法, 如PID控制、模糊控制等。
将控制算法用编程语言实现,并集成 到系统中。
算法参数整定
根据系统性能指标,对控制算法的参 数进行整定,以实现最优控制效果。
调节器设计
调节器类型选择
根据系统需求,选择合适 的调节器类型,如PI调节 器、PID调节器等。
在不同负载和干扰条件下测试系统的性能, 验证系统的鲁棒性。
06
结论与展望
工作总结
针对系统中的关键问题,如电流和速度的动态 调节、超调抑制等,进行了深入研究和改进。
针对实际应用中可能出现的各种干扰和不确定性因素 ,进行了充分的考虑和实验验证,提高了系统的鲁棒
性和适应性。
实现了双闭环直流电动机调速系统的优化设计 ,提高了系统的稳定性和动态响应性能。
通过对实验数据的分析和比较,验证了所设计的 双闭环直流电动机调速系统的可行性和优越性。
研究展望
进一步研究双闭环直流电动机 调速系统的控制策略,提高系
统的动态性能和稳定性。
针对实际应用中的复杂环境和 工况,开展更为广泛和深入的 实验研究,验证系统的可靠性
和实用性。
探索双闭环直流电动机调速系 统在智能制造、机器人等领域 的应用前景,为相关领域的发 展提供技术支持和解决方案。
功率驱动模块
总结词
控制直流电动机的启动、停止和方向。
详细描述
功率驱动模块是双闭环直流电动机调速系统的核心部分,负责控制直流电动机的启动、停止和方向。它通常 由电力电子器件(如晶体管、可控硅等)组成,通过控制电动机的输入电压或电流来实现对电动机的速度和 方向的控制。功率驱动模块还需要具备过流保护、过压保护和欠压保护等功能,以确保电动机和整个系统的
双闭环直流调速系统的设计与仿真毕业设计论文
本科毕业设计(论文)题目:双闭环直流调速系统的设计与仿真研究Graduation Design (Thesis)Design and Simulation of Double Loop DC Motor Control SystemByWu JieSupervised byAssociate Prof. Zhang zhenyanDepartment of Automation EngineeringNanjing Institute of TechnologyMay, 2014摘要为了提高运动控制系统在实际工程中的应用效率,本文介绍了直流调速系统的工程设计方法[1],利用 MATLAB软件,对直流调速系统进行数学建模和系统仿真的研究。
所给出的仿真方法,可以灵活地调节系统的参数,从而获得理想的设计结果,并对设计出的系统进行分析。
建立调节器工程设计方法所遵循的原则是:1)概念清楚、易懂。
2)计算公式简明、好记。
3)不仅给出参数计算公式,而且指明参数调节方向。
4)能考虑饱和非线性控制的情况,同时给出简单的计算公式。
5)适合于各种可以简化成典型系统的反馈控制系统[2]。
由于这个课题相对简单,我在里面加入了相关性的内容以丰富本课题的广度和深度。
在本设计中,我加入了三种简单的单闭环直流调速系统,并且通过对它们进行仿真分析,比较找出了它们的不足之处,从而更明显地体现了双闭环直流调速系统的优越性。
并且通过对两种典型的双闭环直流调速系统进行仿真分析,从而更好地理解和运用双闭环直流调速系统[3]。
关键词:直流电动机;双闭环调速;MATLAB;仿真;直流调速系统;直流脉宽调制;工程设计方法ABSTRACTIn order to raise application efficiency of the motion control system in actual project ,this article discussed the engineering design methods of the speed-governing system of DC motor. The mathematical modeling and system simulation of direct current governor system are researched by means of MATLAB platform . The simulation method can adjust the system controller parameters flexibly, so as to achieve the ideal design results, and the design of the system are analyzed.A controller design method is the principles of:(1)The concept of clear, easy to understand.(2)Simple formula, easy to remember.(3)Not only gives the parameter calculation formula, and indicates the parameter adjustment direction.(4)Can consider the saturation nonlinear control, and gives a simple formula.(5)Suitable for all kinds of feedback control systems can be simplified into a typical system.Because this subject is relatively simple, I joined the correlation content inside to enrich the breadth and depth of the subject. In this design, I added three simple single loop DC speed regulation system, and then analyze them, compared to find their deficiencies, and thus more clearly showed the superiority of double closed loop DC speed regulating system. And through the simulation analysis of two kinds of typical double loop DC speed control system, so as to better understand and use the double loop DC speed control system.Keywords: DC motor, double closed loop,MATLAB,Simulation,V-M,PWM-M,The engineering design method目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 课题研究背景 (1)1.2 直流调速系统国内外研究现状 (1)1.3 研究双闭环直流调速系统的意义 (2)1.4 论文的主要研究内容 (2)第二章仿真软件以及相关硬件简介 (3)2.1 MATLAB/Simulink仿真平台 (3)2.2 仿真的数值算法 (3)2.3 工程设计法 (4)2.4 直流电动机 (4)第三章简单闭环调速系统的设计与仿真 (5)3.1 单闭环有静差转速负反馈调速系统的设计与仿真 (5)3.2 单闭环无静差转速负反馈调速系统的设计与仿真 (11)3.3 带电流截止负反馈的转速反馈系统的设计与仿真 (13)3.4 简单闭环调速系统的优缺点比较 (15)第四章转速、电流双闭环直流调速系统的设计与仿真 (17)4.1 转速、电流双闭环调速系统的设计与仿真 (17)4.2 V-M直流调速系统的设计与仿真 (19)4.3 PWM-M直流调速系统的设计与仿真 (26)第五章总结与展望 (34)致谢 (35)参考文献 (36)第一章绪论1.1 课题研究背景在现代化的工业生产过程中,许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的稳态、动态性能[4]。
双闭环直流调速系统课程设计
SHi-MAML;皿;TI hlHI 门JI iljCi g ^iJtKJ-h直流拖动控制系统课程设计报告目: 双闭环直流调速系统设计院: 沈阳工业大学工程学院业: 电气工程及其自动化级: 1101 班名: 孔令慧号: 120112724指导教师: 佟维妍起止日期:2014年6月16日〜2014年6月22日设计概述.2... 第一章系统总体设计 3...1.1 系统电路结构 3...1.2 两个调节器的作用.4..第二章整体电路分析 6...2.1 电流环设计 6...2.2 转速环设计 6...2.3 典型 I 型系统介绍2.4 典型n型系统介绍.8..2.5 转速调节器的实现.9..2.6 电流调节器的实现.9..2.7 校核转速超调量9...第三章参数计算 1..03.1 相关参数 1...03.2 主要参数计算.1..03.2.1 电流环参数计算 1...03.2.2 转速环参数的计算 1..2 MATLAB 仿真 1..5课程设计体会 1...9.双闭环直流调速系统是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点。
在理论和实践方面都是比较成熟的系统,在电力拖动领域中发挥着及其重要的作用。
由于直流电机双闭环调速是各种电机调速系统的基础,本人就直流电机调速进行了比较系统的研究,从直流电机的基本特性到单闭环调速系统,再进行双闭环直流电机设计方案的研究,用实际系统进行工程设计,并用所学的MATLABS 行仿真,分析了双闭环调速系统的工程设计方法中由于忽略和简化造成的误差。
在双闭环直流调速系统中,转速和电流调节器的结构选择与参数设计需从动态校正的需要来解决,设计每个调节器是,都必须先求该闭环的原始系统开环对数频率特性,再根据性能指标确定校正后系统的预期特性,对于经常正反转运动的系统,尽量缩短启、制动过程的时间是提高生产率的重要因素。
为此,在电机最大允许电流和转矩受到限制的条件下,应该充分利用电机的过载能力,最好是在过渡过程中始终保持电流为允许的最大值,是电力拖动系统以最大的加速度启动,到达稳定转速时,立即让电流降下来,使转矩马上与负载相平衡,从而装入稳态运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙源期刊网 http://www.qikan.com.cn
直流电机双闭环调速系统设计
作者:汪理
来源:《硅谷》2013年第12期
摘 要 双闭环直流调速系统是工业生产过程中应用最广泛的电气传动装置之一。本文主要
是根据三相全波相控整流电路的原理,选择合适的变压器、晶闸管、平波电抗器以及晶闸管保
护、触发电路,组成整流电路。
关键词 直流电机;双闭环;调速系统
中图分类号:TP391 文献标识码:A 文章编号:1671-7597(2013)12-0026-02
1 双闭环调速系统的组成
双闭环调速系统的结构并不复杂,调速效果却非常的好。这个系统中一共有两个调节器,
一个是转速,一个是电流调速器。它的结构原理图如图1所示,图里面的符号分别为:ASR是
转速调节器;TG为测速发电机;ACR为电流调节器;TA是电流互感器;UPE为电力电子变
换器;U*n-转速给定电压;Un-转速反馈电压;Ui-电流反馈电压;U*i是电流给定电压。
2 系统硬件的保护
2.1 晶闸管的保护
晶闸管元件的优点很多。比如承受电压和电流容量在所有器件中最高,开关速度高,开关
损耗小等特点。可是跟其他一些电气元件比较来说,由于晶闸管的击穿电压较为接近运行电
压,而且热时间常数比较小,因此过电压、过电流能力很不好,过电压、过电流在短时间内都
可能损坏元件。所以如果要使晶闸管元件正常的工作,只通过选择合理的器件还远远不够,对
于保护环节也要十分注意。一般在这类装置中,要有相应的保护设计。对于晶闸管的保护设
计,往往是通过计算其过电流,过电压的产生的特性,分析其相应的原因,采取有效的措施,
避免此类损坏元件的情况出现,进而让装置更加稳定工作。
2.2 晶闸管关断过电压及其保护
晶闸管关断时会有过电压情况,这种过电压是瞬时的。对于这种瞬时过电压,如果能有个
元件吸收掉这个瞬时电压,让电压在允许的范围内,这样就能起到保护作用了。我们都知道电
容器正好具有这样的特点,因此我们最常用的方法就是在晶闸管两段并联电容。如果在电路中
的电容电路加入一个电阻并且是串联接法,那么我们就叫这种电路为过电压阻容吸收电路。
2.3 直流侧过电压及其保护
龙源期刊网 http://www.qikan.com.cn
当把负载断开时,储存在变压器、交流电路的磁场能量会在开关和整流桥间产生过电压。
在整流器两端某两桥臂突然断开(快速熔断或晶闸管烧断)的时候,因为大电感中电流具有不
可能突变的性质,所以立刻在直流侧感应出很高的反向电压,此时通过负载加在处于关断状态
的晶闸管上,可能出现硬开通导致损坏的情况。因为直流侧过电压的能量很大,所以应该采用
小晶闸管来保护。用快速熔断器作为晶闸管的保护电路是晶闸管装置采用的几种过电流保护措
施中最常用的。因为这种保护电路与普通熔断器相比具有快速熔断性质,是最简单有效的过电
流保护器件。
3 平波电抗器的计算
如果想要在电路中让直流负载通过比较平稳的直流电,一般情况下会将铁芯电抗器(带有
气隙)串联接入整流电路输出端口,我们称之为平波电抗。其中有两个主要的计算方面:一是
输出电流脉动系数必须达到一定要求时电抗器电感值;二是在保证电流连续时电抗的电感值。
3.1 电抗器保持输出电流连续时的计算
为了能否使得全部的工作区域里面输出电流一直连续,必须使得临界电流小于等于负载电
流的最小值。
3.2 电抗器限制输出电流脉动时的计算
为了让输出电流连续,在选取平波电感等于60 mH时,能同时满足脉动要求。
3.3 晶闸管触发电路的要求及分析
本文的直流电动机是由三相桥式全控整流电路供电,采用锯齿波同步双脉冲触发电路。
3.3.1 电流环的设计
确定时间常数,选择调节器结构 ,校验近似条件。
3.3.2 转速环的设计
确定时间常数,选择调节器结构,计算转速调节器参数,验近似条件。
4 同步
在三相晶闸管电路中,正确选择触发电路同步电压的相位是十分重要的。在阳极电压接入
正电压的一个区间内,触发脉冲此时出现才会使得晶闸管被触发导通。那么在一些常用的电路
中,例如正弦波移相电路;锯齿波移相触发电路,脉冲送出的时刻是取决于接入触发电路的不
同相位同步电压。想要实现移相就需要改变控制与偏移电压的值。所以这里可以看出,要让触
龙源期刊网 http://www.qikan.com.cn
发电路在各个管子需要触发信号时输出脉冲,需要根据被触发的管子的阳极电压的相位,选择
合适的同步电压。我们称这样的方法叫做晶闸管电路的同步或定相。
实现同步的具体步骤如下。
1)依照脉冲移相范围和触发的要求,我们可以首先确定一个相位关系即同步信号电压与
相对应的晶闸管阳极电压两者间的相位关系。
2)通过将电网的线电压,一般是380 v作为矢量参考,加入整流变压器的接法、钟点数
量,可以画出晶闸管阳极电压的矢量坐标位置,然后用步骤1)的结果可以描绘出对应的同步
相电压和线电压的矢量图。
3)确定同步变压器的钟点数和接法,这个只需要根据同步变压器一次,二次的线电压位
置即可。
5 PI控制器设计
参考文献
[1]陈伯时.电力拖动自动控制系统(第二版)[M].机械工业出版社,2002.
[2]夏德矜.自动控制原理[M].机械工业出版社,2001.
[3]康光华.电子技术基础(模拟部分)[M].高等教育出版社,1998.
[4]彭容修.数字电子技术基础[M].武汉理工大学出版社.
[5]李永东.交流电机数字控制系统[M].机械工业出版社.
6]施保华,等.计算机控制技术[M].华中科技大学出版社.
[7]Mohan,Undeland,Robbins.《Power Electronics》.Third Edition.Higher Education Press.