基于时间分割的前加减速快速插补算法
合集下载
数控插补计算法

2011年4月28日9时41分
23
在一个△t内:(1)原理:设刀具沿逆时针
在0~t内(取△t=1):
2011年4月28日9时41分
24
• (2)与直线插补原理的区别: • 圆弧插补中被积函数是变量,被积函数为动点坐标,每进 一步x坐标-1,y坐标+1,直线插补的被积函数是常数(Xe, Ye)。 • x轴的累加用y坐标,y轴的累加用x坐标. • 圆弧插补终点判别需采用两个终点计数器。 • 对于直线插补,如果寄存器位数为n ,无论直线长短都需迭 代次到达终点。
•
2011年4月28日9时41分
5
插补误差不得大于一个脉冲当量。这种方法控制精度和进给 速度低,主要运用于以步进电动机为驱动装置的开环控制系 统中. • 二、数据采样插补 • 数据采样插补又称时间标量插补或数字增量插补。这类 插补算法的特点是数控装置产生的不是单个脉冲,而是一组 数字量。插补运算分两步完成。 第一步为粗插补,它是在给定起点和终点的曲线之间插入 若干个点,即用若干条微小直线段来拟合给定曲线,每一微 小直线段的长度△L都相等,且与给定进给速度有关。粗插 补时每一微小直线段的长度△L与进给速度F和插补T周期有 关,即△L=FT。
2011年4月28日9时41分
9
四个步骤: 1.偏差判别 2.坐标进给 3.新点偏差计算 4.终点判别
2011年4月28日9时41分
10
1)偏差判别 在直线插补时,以第一象限直线OE为例,直线的起点O在坐 标原点,终点坐标为E(xe,ye),如图1.10所示,对直线上任一 点(x,y),则由直线方程, xey—xye=0 设P(xi,yi)为加工动点,则: 若P位于该加工直线上,有:xe yi—xiye=0 若P位于该加工直线上方,有:xe yi—xiye>0 若P位于该加工直线上方,有:xe yi—xiye<0 由此定义偏差判别函数Fi为:Fi= xe yi—xiye 当Fi=0时,加工动点在直线上; 当Fi>0时,加工动点在直线上方; 当Fi<0时,加工动点在直线下方。
数控技术第3章插补原理

5. 运算举例(第Ⅰ 象限逆圆弧) 运算举例( 象限逆圆弧) 加工圆弧AE 起点(4,3) AE, (4,3), 终点(0,5) E=(4-0)+(5加工圆弧AE,起点(4,3), 终点(0,5) ,E=(4-0)+(53)=6 插补过程演示
三.逐点比较法的进给速度 逐点比较法的进给速度
逐点比较法除能插补直线和圆弧之外,还能插补椭圆、 逐点比较法除能插补直线和圆弧之外,还能插补椭圆、 抛物线和双曲线等二次曲线。此法进给速度平稳, 抛物线和双曲线等二次曲线。此法进给速度平稳, 精度较高。在两坐标联动机床中应用普遍. 精度较高。在两坐标联动机床中应用普遍. 对于某一坐标而言, 对于某一坐标而言,进给脉冲的频率就决定了进给速 度 :
插补是数控系统最重要的功能; 插补是数控系统最重要的功能; 插补实际是数据密集化的过程; 插补实际是数据密集化的过程; 插补必须是实时的; 插补必须是实时的; 插补运算速度直接影响系统的控制速度; 插补运算速度直接影响系统的控制速度; 插补计算精度影响到整个数控系统的精度。 插补计算精度影响到整个数控系统的精度。 插补器按数学模型分类,可分为一次插补器、 插补器按数学模型分类,可分为一次插补器、二次插补器及高 次曲线插补器; 次曲线插补器; 根据插补所采用的原理和计算方法不同, 根据插补所采用的原理和计算方法不同,分为软件插补和硬件 插补。目前大多采用软件插补或软硬件结合插补。 插补。目前大多采用软件插补或软硬件结合插补。 根据插补原理可分为:脉冲增量插补和数字采样插补。 根据插补原理可分为:脉冲增量插补和数字采样插补。
脉冲当量: 脉冲当量:每一个脉冲使执行件按指令要求方向移动的直线 距离,称为脉冲当量, 表示。一般0.01mm 0.001mm。 0.01mm~ 距离,称为脉冲当量,用δ表示。一般0.01mm~0.001mm。 脉冲当量越小, 脉冲当量越小,则机床精度越高
第三章 数控插补原理

解:插补完这段直线刀具沿X和Y轴应走的总步数为 = x e + y e =5 + 3=8。 Y 刀具的运动轨迹如图 E(5,3) 3
2 1 O 1 2 3 4 5 X
第二节 基准脉冲插补
插补运算过程见表:
循环序号 偏差判别 F ≥0 坐标进给 +X 偏差计算 Fi+1=Fi-ye
教案 3
终点判别
m
Y
m(Xm,Ym) B(XB,YB)
+Y2
2 m-R
若Fm=0,表示动点在圆弧上;
若Fm>0,表示动点在圆弧外; 若Fm<0,表示动点在圆弧内。
Rm
R A(XA,YA)
第Ⅰ象限逆圆弧
X
第二节 基准脉冲插补
2)坐标进给
教案 3
与直线插补同理,坐标进给应使加工点逼近给定圆弧,规定如下: 当Fm≥0时,向-X方向进给一步; 当Fm<0时,向+Y方向进给一步。
教案 3
若Fi=0,表示动点在直线OE上,如P; 若Fi>0,表示动点在直线OE上方,如P′; 若Fi<0,表示动点在直线OE下方,如P″。
O
xi 第Ι象限直线
X
第二节 基准脉冲插补
2)坐标进给
教案 3
坐标进给应逼近给定直线方向,使偏差缩小的方向进给一步,由插补装 置发出一个进给脉冲控制向某一方向进给。
教案 3
直线线型 进给方向 偏差计算 直线线型
L1、L4 L2、L3 +X -X Fi+1=Fi-ye L1、L2 L3、L4
偏差计算
Fi+1=Fi+xe
注:表中L1、L2、L3、L4分别表示第Ⅰ、第Ⅱ、 第Ⅲ、第Ⅳ象限直线,偏差计算式中xe、ye均代 入坐标绝对值。
第六讲 插补的基本原理
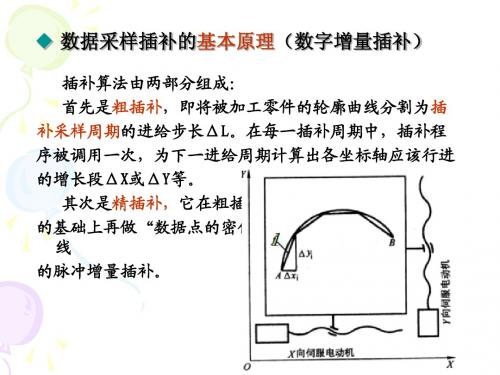
yi − ∆yi −1 / 2 ∆xi = ∆L R xi +1 = xi + ∆xi yi +1 = R 2 − x 2 i +1 ∆yi = yi − yi +1
y ym (公式1) 公式1
A( x0 , y0 ) Pi ( xi , yi ) ∆xi
θi
D
β i ∆α i
d (∆yi ) = xi +1 / yi +1 d (∆xi )
d (∆xi ) = yi +1 / xi +1 d (∆yi )
当 xi ≤ y i 当 xi > yi
应选公式1 时,应选公式1。 应选公式2 时,应选公式2。
§2.5 刀具半径补偿
一、刀具补偿原理 数控系统对刀具的控制是以刀架参考点为基准 数控系统对刀具的控制是以刀架参考点为基准 刀架参考点 而零件加工程序给出的是零件轮廓轨迹 零件轮廓轨迹, 的,而零件加工程序给出的是零件轮廓轨迹,但实 际上是要用刀具的刀尖实现加工的, 刀尖实现加工的 际上是要用刀具的刀尖实现加工的,这样需要在刀 架的参考点与加工刀具的刀尖之间进行位置偏置 位置偏置。 架的参考点与加工刀具的刀尖之间进行位置偏置。 这种位置偏置由两部分组成: 这种位置偏置由两部分组成:刀具长度补偿及刀具 半径补偿。
Pi(xi,yi) x
∆xi = ∆L cos α ye ∆yi tan α = x = ∆x 任意T内 任意T e i xi +1 = xi + ∆xi xe 公式1 (公式1) cos α = 2 2 yi +1 = xi +1 tan α xe + ye ∆yi = yi +1 − yi
第三章插补原理及控制方法

及
控
终点判别
N
终点?
制
方
法
结束
25
二、逐点比较法圆弧插补---其它象限
y
F>0
y
F>0
第
F<0
F<0
三 章
o
x
o
x
插
补
原
理
逆圆
顺圆
及 控
各象限插补进给方向, 各象限插补进给方向,远
制
远离原点坐标值加一接 离原点坐标值加一,接近
方
近原点坐标值减一。
原点坐标值减一。
法
26
作业
试推导逐点比较法第一象限顺圆弧 第 插补的递推公式,并画出程序流程图。
逐点比较插补计算法(简称逐点比较法)
第
三 章
数字积分插补计算法(简称数字积分法)
插 时间分割插补计算法(简称时间分割法)
补
原
理 及
样条插补计算方法等。
控
制
方
法
2
3-1 逐点比较法插补
逐点比较插补计算法(简称逐点比
第 较法)又称区域判别法。
三
章
其原理是:计算机在控制加工轨迹过
插 程中逐点计算和判断加工偏差以控制坐
章
当M点在直线上时, + Δ X
y
插 补
(αi= α)
原
M (x i y j )
A
理
及 控
tg αi= tg α
制
方 法
αi
oα
x
6
其中 tg αi= y j / xi
tgα= y e / x e
tg αi -tgα= y j / xi - y e / x e
数控车床的进给速度和加减速控制

二、进给速度控制
CNC系统中进给速度控制方式:
软件控制 采用——程序计时法(程序延时法)。
软件与接口控制 采用——时钟中断法、 v/Δ L积分器法(适于采用DDA或 扩展DDA插补中的稳速控制)。
1、程序计时法(程序延时法)
其过程是:
(1)计算出每次插补运算所占用的时间;
(2)由给定的F值计算出相应的进给脉冲间隔时间 ;
前加减速控制是对编程的F指令值即合成速度进 行控制。首先要计算出稳定速度Fs和瞬时速度Fi。
稳定速度——就是系统处于恒定进给状态时, 在一个插补周期内每插补一次的进给量。实际上就 是编程给定F值(mm/min)在每个插补周期T(ms) 的进给量。
考虑调速方便,设置了快速和切削进给的倍率 开关,其速度系数设为K(%),可得Fs的计算公式 为:
设直线终点P坐标为(xe , ye),x为长轴,其 加工点A(xi , yi) 已知,则瞬时加工点A离终点P距 离si为:
si
xe
xi
1
c os
对于圆弧插补,
si的计算应按圆弧所 对应的圆心角小于及
大于π 两种情况进行 分别处理,如图。
小于π 时,瞬时加
工点离圆弧终点的直线
距离越来越小,以MP为
每加速一次,瞬时速 度为: Fi+1=Fi+at
新的瞬时速度Fi+1参 加插补计算,对各坐标轴 进行进给量的分配。
减速时,系统每进行一次插补运算后,都要进 行终点判断,也就是要计算出离终点的瞬时距离si 。
并按本程序段的减速标志,判别是否已到达减速区 ,若已到达,则要进行减速。
如图,如果稳定速度 Fs和设定的加/减速度a已 确定,可用下式计算出减 速区域:
后加减速控制的规律实际 上与前加减速一样,通常 有直线和指数规律的加减 速控制。
2.2-插补原理
Numerical Control Technology
插补原理
Chapter 2 Interpolation Principle
algorithm
机床数控技术
Numerical Control Technology
1
插补的概念
2
常用的插补方法
3 4 5
逐点比较法
数字积分法 时间分割法
6
本章小结
机床数控技术
1 插补的基本概念 Basic Concepts
A 什么是插补
Numerical Control Technology
根据所给定的进给速度和轮廓线形的要求,在 轮廓已知点之间,确定一些中间点的方法,这种方 法称为插补方法或插补原理。
机床数控技术
1 插补的基本概念 Basic Concepts
A 什么是插补 B 要解决的基本问题
(4) 终点判别
开始加工时,将刀具移到起点,刀具正好处于直线上,偏差为零, 即F=0,根据这一点偏差可求出新一点偏差,随着加工的进行,每一新 加工点的偏差都可由前一点偏差和终点坐标相加或相减得到。 在插补计算、进给的同时还要进行终点判别。常用终点判别方法, 是设置一个长度计数器,从直线的起点走到终点,刀具沿X轴应走的步数 为X e,沿Y轴走的步数为Ye,计数器中存入X和Y两坐标进给步数总和∑= ∣Xe∣+∣Ye∣,当X或Y坐标进给时,计数长度减一,当计数长度减到 零时,即∑=0时,停止插补,到达终点。
图2 圆弧插补轨迹
图3 直线插补轨迹
机床数控技术
Numerical Control Technology
逐点比较法,就是每走一步都要和给定轨迹比较一次, 根据比较结果来决定下一步的进给方向,使刀具向减小偏差 的方向并趋向终点移动,刀具所走的轨迹应该和给定轨迹非 常相“象”。 算法的特点是;运算直观,插补误差小于一个脉冲当量, 进给速度波动小,调节方便,在两坐标联动的数控机床中应 用较为广泛, 逐点比较插补法通过比较刀具与所加工曲线的 相对位置,确定刀具的起动力向。
插补原理
Chapter 2 Interpolation Principle
algorithm
机床数控技术
Numerical Control Technology
1
插补的概念
2
常用的插补方法
3 4 5
逐点比较法
数字积分法 时间分割法
6
本章小结
机床数控技术
1 插补的基本概念 Basic Concepts
A 什么是插补
Numerical Control Technology
根据所给定的进给速度和轮廓线形的要求,在 轮廓已知点之间,确定一些中间点的方法,这种方 法称为插补方法或插补原理。
机床数控技术
1 插补的基本概念 Basic Concepts
A 什么是插补 B 要解决的基本问题
(4) 终点判别
开始加工时,将刀具移到起点,刀具正好处于直线上,偏差为零, 即F=0,根据这一点偏差可求出新一点偏差,随着加工的进行,每一新 加工点的偏差都可由前一点偏差和终点坐标相加或相减得到。 在插补计算、进给的同时还要进行终点判别。常用终点判别方法, 是设置一个长度计数器,从直线的起点走到终点,刀具沿X轴应走的步数 为X e,沿Y轴走的步数为Ye,计数器中存入X和Y两坐标进给步数总和∑= ∣Xe∣+∣Ye∣,当X或Y坐标进给时,计数长度减一,当计数长度减到 零时,即∑=0时,停止插补,到达终点。
图2 圆弧插补轨迹
图3 直线插补轨迹
机床数控技术
Numerical Control Technology
逐点比较法,就是每走一步都要和给定轨迹比较一次, 根据比较结果来决定下一步的进给方向,使刀具向减小偏差 的方向并趋向终点移动,刀具所走的轨迹应该和给定轨迹非 常相“象”。 算法的特点是;运算直观,插补误差小于一个脉冲当量, 进给速度波动小,调节方便,在两坐标联动的数控机床中应 用较为广泛, 逐点比较插补法通过比较刀具与所加工曲线的 相对位置,确定刀具的起动力向。
第16讲数据采样插补的原理

刀尖位置与机床控制刀位点不同时,需要刀尖位置 补偿。刀具磨损或者换了新的刀具后,实际刀尖位置变 化,需要补偿。
14
3.6 刀具半径补偿 数 控 技 术
第 三 章
1)B功能刀具半径补偿计算: ◆直线加工时刀具补偿;
Y
A(x,y) ∆y r A’(x’,y’)
第 三 章
计 算 机 数 控 装 置
扩展DDA插补是在DDA插补的基础上发展起来,并将DDA法 用切线逼近圆弧的方法改进为用割线逼近,减少了逼近误差, 提高了圆弧插补的精度。
7
3.5 数据采样插补的原理 数 一. 数据采样插补的基本思想 控 (二) 数据采样法之二——扩展DDA法 技 1 .扩展DDA直线插补 V 术 X V T TX X
第 三 章
ΔPAG∽ΔAOC
AOC PAC i
i 1 i
1 i 2
计 算 机 数 控 装 置
插补步长和角步距的关系
l cos X
l sin Y
5
3.5 数据采样插补的原理
数 一. 数据采样插补的基本思想 控 直线函数法的主要问题: 技 1.用弦线逼近圆弧,因此插补误差主要为半径的绝对误差。 术 因插补周期是固定的,该误差取决于进给速度和圆弧半径,
第 三 章
直线与X轴夹角为,若已知轮廓步长,则本次插补周期内各坐 标轴进给量为: X l cos
计 算 机 数 控 装 置
Ye Y x Xe
下式可以避免计算三角函数:
cos
Xe X e2 Ye2一. 数据采样插补的基本思想 控 2. 直线函数法圆弧插补: 技 直线函数法圆弧插补,需先根据进给速度指令F,计算出 术 轮廓步长l,然后以长为l的弦线逼近圆弧,再将弦l分解到两个