第12讲 连续体的振动

第6章--弹性体的一维振动题解
第6章--弹性体的一维振动题解
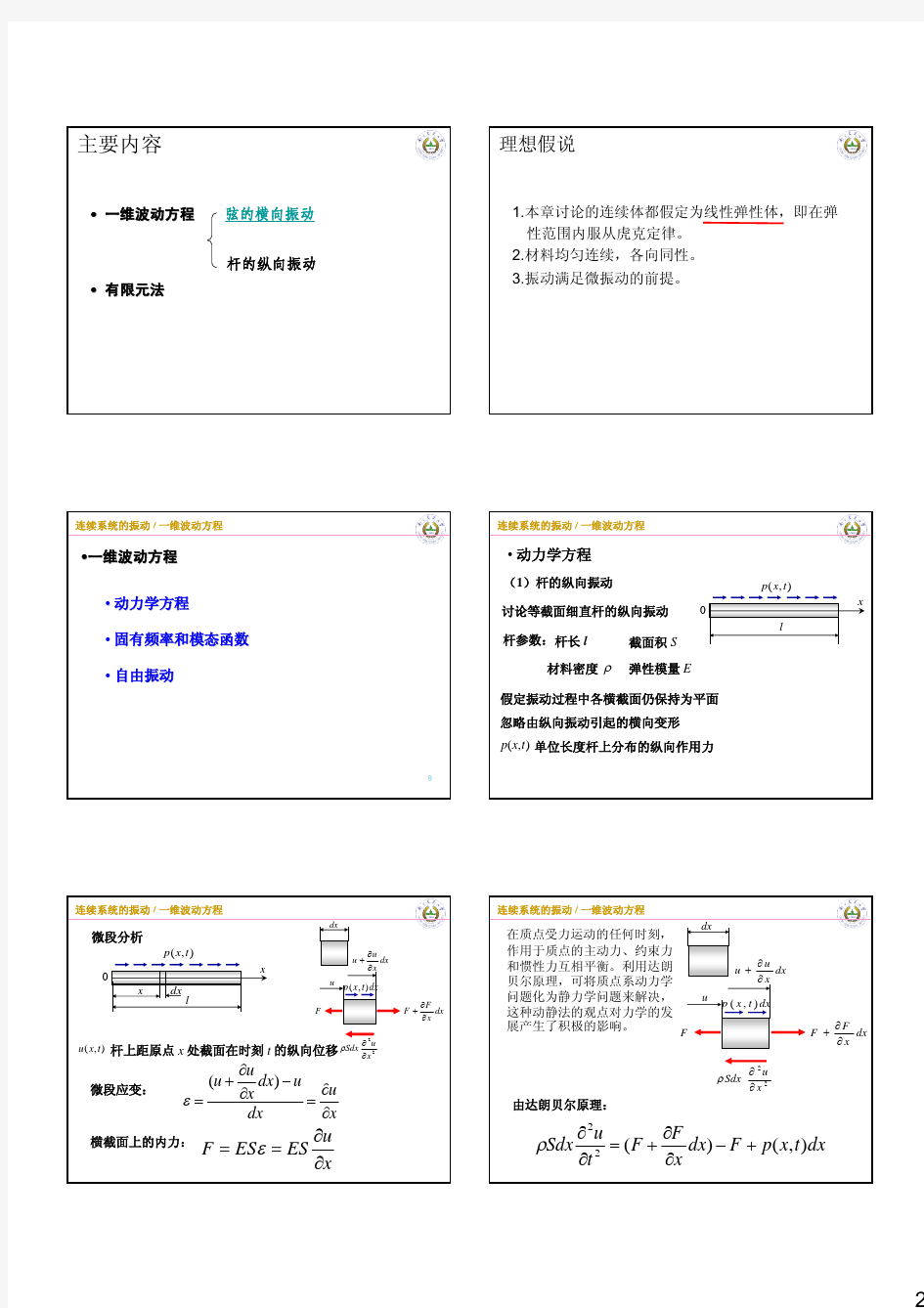
126 习题 6-1 一等直杆沿纵向以等速v 向右运动,求下列情况中杆的自由振动∶ (1) 杆的左端突然固定;杆的右端突然固定;杆的中点突然固定。 解;(1)杆的左端突然固定; 杆的初始条件为:()()0 ,00u x u x == (),0u x V =& 由式(8-15),(8-16)可知,1,3,52i i a p i l π==,… ,...3,2,1i ,x 2l i sin D x)U ~ i i ==π( 由归一化条件 2 0sin 12l i i x A D dx l πρ? ?= ?? ??得2 i D Al ρ= 即正则振型为,...3,2,1i ,x 2l i sin Al 2x)U ~ i == π ρ( 由式(8-39)得正则坐标表示的初始条件为 ()0 0sin 2l i i i AVD xdx l πη ρ=?&2i l AVD i ρπ = ()00i η=,i=1,3,5,… 由式(8-40)得()0sin i i i i p t p ηη = &,进而有: t 2l a i sin 2l x i sin i 1a 8V l t sinp a i 2l i 2l AV D 2l x i sin D )t (U ~ )t ,x (u ,...3,1i 2 2i i ,... 3,1i i i ,...3,1i i ∑∑∑∞=∞ =∞ === =πππππρπη (2)杆的右端突然固定;
127 杆的初始条件为:()()0 ,00u x u x == (),0u x V =& 由式(8-15),(8-16)可知,1,3,52i i a p i l π==,… ...5,3,1i ,x 2l i cos C x)U ~ i i ==π( 由归一化条件1)2cos (2 =? dx l x i C A i l πρ得Al C i ρ2= 即正则振型为,...5,3,1i ,x 2l i cos Al 2x)U ~ i == π ρ( 由式(8-39)得正则坐标表示的初始条件为 ?--==l i i i i i l AV C dx l x i AVC 0 2 1 )1(22cos )0(π ρπρη& ()00i η=,i=1,3,5,… 由式(8-40)得()0sin i i i i p t p ηη = &,进而有: t 2l a i sin 2l x i cos i 1)1(a 8Vl t sinp a i 2l i 2l AVD 2l x i sin D )t (U ~ )t ,x (u ,...3,1i 2 2 1 2i i ,...3,1i i i ,...3,1i i ∑∑∑∞ =-∞ =∞ =-== =πππππρπηi 6-2 求下列情况中当轴向常力突然移去时两端固定的等直杆的自由振动。 (1) 常力F 作用于杆的中点,如题6-2(a) 图所示; (2) 常力F 作用于杆的三分之一点处,如题6-2(b) 图所示;
机械振动系统考试复习题
机械振动系统考试复习题 一、填空题(本题15分,每空1分) 1、不同情况进行分类,振动(系统)大致可分成,()和非线性振动;确定振动和();()和强迫振动;周期振动和();()和离散系统。 2、在离散系统中,弹性元件储存( ),惯性元件储存(),( )元件耗散能量。 3、周期运动的最简单形式是(),它是时间的单一()或()函数。 4、叠加原理是分析()的振动性质的基础。 5、系统的固有频率是系统()的频率,它只与系统的()和()有关,与系统受到的激励无关。 二、简答题(本题40分,每小题10分) 1、简述机械振动的定义和系统发生振动的原因。(10分) 2、简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。(10分) 3、共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?(10分) 4、多自由系统振动的振型指的是什么?(10分)
一、填空题(本题15分,1空1分) 1、机械振动是指机械或结构在(静平衡)附近的(弹性往复)运动。 2、按不同情况进行分类,振动系统大致可分成,线性振动和(非线性振动);确定性振动和随机振动;自由振动和和(强迫振动);周期振动和(非周期振动);(连续系统)和离散系统。 3、(惯性 )元件、(弹性 )元件、(阻尼 )元件是离散振动系统的三个最基本元素。 4、叠加原理是分析(线性振动系统 )的振动性质的基础。 5、研究随机振动的方法是(统计方法),工程上常见的随机过程的数字特征有:(均值),(方差),(自相关)和互相关函数。 6、系统的无阻尼固有频率只与系统的(质量)和(刚度)有关,与系统受到的激励无关。 二、简答题(本题40分,每小题5分) 1、简述确定性振动和随机振动的区别,并举例说明。 答:确定性振动的物理描述量可以预测;随机振动的物理描述量不能预测。比如: 单摆振动是确定性振动,汽车在路面行驶时的上下振动是随机振动。 4、简述非周期强迫振动的处理方法。 答:1)先求系统的脉冲响应函数,然后采用卷积积分方法,求得系统在外加激励下 的响应; 2)如果系统的激励满足傅里叶变换条件,且初始条件为0,可以采用傅里叶变换的方法,求得系统的频响函数,求得系统在频域的响应,然后再做傅里叶逆变换,求得系统的时域响应; 3)如果系统的激励满足拉普拉斯变换条件,且初始条件不为0,可以采用拉普拉斯变换的方法,求得系统的频响函数,求得系统在频域的响应,然后再做拉普拉斯逆变换,求得系统的时域响应; 5、什么是共振,并从能量角度简述共振的形成过程。 答:当系统的外加激励与系统的固有频率接近时候,系统发生共振;共振过程中,外加激励的能量被系统吸收,系统的振幅逐渐加大。 6、简述刚度矩阵[K]的元素,ijk的意义。 答:如果系统的第j个自由度沿其坐标正方向有一个单位位移,其余各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i个自由度上施加的外力就是kij。 7、简述线性变换[U]矩阵的意义,并说明振型和[U]的关系。答:线性变换[U]矩阵是系统解藕的变换矩阵;[U]矩阵的每列是对应阶的振型 8、简述线性系统在振动过程中动能和势能之间的关系。 答:线性系统在振动过程中动能和势能相互转换,如果没有阻尼,系统的动能和势能之和为常数。
《机械振动》考试试题
2009--2011中南大学考试试卷 一、填空题(本题15分,每空1分) 1、按不同情况进行分类,振动系统大致可分成,线性振动和(非线性振动);(确定性振动)和随机振动;自由振动和(强迫振动);周期振动和(瞬态振动);(连续系统)和离散系统。 2、(惯性 )元件、(弹性 )元件、(阻尼 )元件是离散振动系统的三个最基本元素。 3、系统固有频率主要与系统的(质量)和(刚度)有关,与系统受到的激励无关。 4、研究随机振动的方法是(概率统计),工程上常见的随机过程的数字特征有:(均值),(方差),(自相关函数)和(互相关函数)。 二、简答题(本题40分,每小题8分) 1、 简述机械振动的定义和系统发生振动的原因。(10分) 答:机械振动是指机械或结构在它的静平衡位置附近往复弹性运动。 振动系统发生振动的原因是由于外界对系统运动状态的影响,即外界对系统的激励或作用。 2、 简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。 答:实际阻尼是度量系统消耗能量的能力的物理量,阻尼系数c 是度量阻尼的量; 临界阻尼是c2enm ω=;阻尼比是/ecc ξ= (8分) 3、 共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程? 答:共振是指振动系统在激励频率约等于系统的固有频率时的振动状态。在此过程中,激励力与阻尼力平衡,弹性力与惯性力平衡。即动能与势能相互转化,激励力提供阻尼消耗。 4、 简述线性系统在振动过程中动能和势能之间的关系。 (8分) 5、 简述刚度矩阵[K]中元素k ij 的意义。 答:如果系统的第j 个自由度沿其坐标正方向有一个单位位移,其余各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i 个自由度上施加的外力就是kij (8分) 三、计算题(45分) 3.1、(10分)求如图1所示的扭转系统的固有频率。 3.2、(15分)如图2所示系统,轮子可绕水平轴转动,对转轴的转动惯量为I ,轮缘绕有软绳,下端挂有重量为P 的物体,绳与轮缘之间无滑动。在图示位置,由水平弹簧维持平衡。半径R 与a 均已知。 图 1
第四章 连续体的振动
第四章连续体的振动 拉格朗日(https://www.360docs.net/doc/f72951565.html,grange):1762年建立了离散系统振动的一般理论. 对连续系统研究最早的是弦线的振动 达朗贝尔(J.le R.d’Alembert)1746年用偏微分方程得到弦线振动的波动方程,并求出行波解 伯努利(D.Bernoulli)1753年用无穷多个模态叠加的方法得到了弦线振动的驻波解 1759年拉格朗日(https://www.360docs.net/doc/f72951565.html,grange):从驻波解推得行波解 1811年傅里叶提出函数的阶数展开理论,给出严格的数学证明‘其它连续系统的振动问题也相继得到研究 伯努利(D.Bernoulli)1744-1751年研究了梁的横向振动,导出了自由.简支和固定端的频率方程和振型函数 奇拉尼(E.F.F.Chladni):1802年研究了杆的轴向和扭转振动.
本章只讨论理想弹性体的振动理想弹塑性体满足以下假设条件 ①各向同性;②均质分布;③服从虎克定律 §4.1 弦的振动 T (,)q x t 讨论两端受到张力拉紧的弦,弦上还受到横向干扰力 的作用 (,) q x t y x dx x dm Ads ρ=第四章连续体的振动
设弦的密度为ρ(质量/单位体积)假设小变形,弦力不随挠度变化。 则弦上的任意一点的位移y 应为位置x 与时间t 的函数,即 (,) y y x t =2 2 ()()dm Ads A dx dy Adx ρρρ==+≈(,) (,)y x t x t tg x θθ ?=≈?y [,]x x dx +沿方向作用在微小区间的外力之和为 (,) [(,)](,)(,)(,)(,)x t T x t dx T x t q x t dx x x t T dx q x t dx x θθθθ?+-+??=+?
机械振动1
机械振动课程总结 一、课程总结 经过32个学时系统的学习,对机械振动这门课程有了一定的掌握和理解。老师先从机械振动的基本概念入手,逐步深化,带我们领略了机械振动的内涵。下面按照所学知识结构对该门课程进行总结和回顾。 机械振动这门课程先讲述了机械振动的简单概念,然后按照自由度的概念分别讲述了一自由度系统振动,即振系在受到初始激扰后的振动,包括自由振动、强迫振动以及瞬态振动,然后是二自由度和多自由度系统的振动,以及这些振动的分析方法。还分析了弹性体振动的准确解以及近似解法,这也属于多自由度系统的振动。在这个过程中,还简要介绍了拉格朗日方程以及非线性振动和随机振动。整门课程内容饱满充实,结构紧凑,从一自由度到多自由度,从离散系统到连续系统,衔接紧密。 所谓机械振动,就是物体在平衡位置附近来回往复的运动。任何物体都有质量和弹性,因此都有可能发生振动,它们都是振动系统。振动系统有离散系统和连续系统之分。描述振动系统的参数有自由度,也就是确定一个振动系统空间位置所需要的独立坐标的个数。振动系统在外界振动激扰(激励)作用下,会呈现一定的振动响应(反应)。激扰就是系统的输入,响应是输出。按照激扰的方式可以讲振动分为自由振动、强迫振动、自激振动和参激振动。然后具体讲述了自由振动和强迫振动。它们和瞬态振动一样,同属于一自由度系统的振动。 一般来说,自由振动是弹性系统偏离于平衡状态以后,不再受外界激扰的情形下所发生的振动。简谐振动是自由振动的一种形式,它是无阻尼振系的自由振动,其位移可表示为时间的正弦函数。对理想的无阻尼的自由振动的分析可以采用能量法。其遵循的原理是,在阻尼略去不计的条件下,振系在自由振动时的动能与势能之和(即机械能)保持常值。令T与U分别代表振系动能与势能,有T+U=常数。这就是应用于振系的能量守恒原理。实际系统都是有阻尼的,如衰减振动,它们的分析可以应用牛顿运动定律,列出确定这种振动规律的微分方程,求解得出位移与速度的表达式以及频率与周期的公式。 强迫振动是弹性系统在受到外界控制的激扰作用下发生的振动。激扰可以是周期性的,也可以是非周期的任意的时间函数,或者是只持续极短时间的冲击作
弹性体的一维振动题解
习题 6-1 一等直杆沿纵向以等速v 向右运动,求下列情况中杆的自由振动∶ (1) 杆的左端突然固定;杆的右端突然固定;杆的中点突然固定。 解;(1)杆的左端突然固定; 杆的初始条件为:()()0,00u x u x == (),0u x V = 由式(8-15),(8-16)可知,1,3,52i i a p i l π= =,… ,...3,2,1i ,x 2l i sin D x)U ~ i i ==π( 由归一化条件2 0sin 12l i i x A D dx l πρ? ?= ?? ?? 得i D =即正则振型为,...3,2,1i ,x 2l i sin Al 2x)U ~ i == π ρ( 由式(8-39)得正则坐标表示的初始条件为 ()0 0sin 2l i i i AVD xdx l πηρ=?2i l AVD i ρπ = ()00i η=,i=1,3,5,… 由式(8-40)得() 0sin i i i i p t p ηη= ,进而有: t 2l a i sin 2l x i sin i 1a 8V l t sinp a i 2l i 2l AV D 2l x i sin D )t (U ~ )t ,x (u ,...3,1i 22i i ,... 3,1i i i ,... 3,1i i ∑∑∑∞=∞ =∞ === =πππππρπη (2)杆的右端突然固定; 杆的初始条件为:()()0,00u x u x == (),0u x V = 由式(8-15),(8-16)可知,1,3,52i i a p i l π= =,… ...5,3,1i ,x 2l i cos C x)U ~ i i ==π( 由归一化条件 1)2cos (2 =? dx l x i C A i l πρ得Al C i ρ2=
机械振动学习题解答大全
机械振动习题解答(四)·连续系统的振动 连续系统振动的公式小结: 1 自由振动分析 杆的拉压、轴的扭转、弦的弯曲振动微分方程 22 222y y c t x ??=?? (1) 此式为一维波动方程。式中,对杆,y 为轴向变形,c =y 为扭转 角,c ;对弦,y 为弯曲挠度,c =。 令(,)()i t y x t Y x e ω=,Y (x )为振型函数,代入式(1)得 20, /Y k Y k c ω''+== (2) 式(2)的解为 12()cos sin Y x C kx C kx =+ (3) 将式(3)代入边界条件,可得频率方程,并由此求出各阶固有频率ωn ,及对应 的振型函数Y n (x )。可能的边界条件有 /00, 0/0p EA y x Y Y GI y x ??=???? '=?=????=???? 对杆,轴向力固定端自由端对轴,扭矩 (4) 类似地,梁的弯曲振动微分方程 24240y y A EI t x ρ??+=?? (5) 振型函数满足 (4)442 0, A Y k Y k EI ρω-== (6) 式(6)的解为 1234()cos sin cosh sinh Y x C kx C kx C kx C kx =+++ (7) 梁的弯曲挠度y (x , t ),转角/y x θ=??,弯矩22/M EI y x =??,剪力 33//Q M x EI y x =??=??。所以梁的可能的边界条件有 000Y Y Y Y Y Y ''''''''======固定端,简支端,自由端 (8) 2 受迫振动 杆、轴、弦的受迫振动微分方程分别为 222222222222(,) (,), (,) p p u u A EA f x t t x J GI f x t J I t x y y T f x t t x ρθθ ρρ??=+????=+=????=+??杆:轴:弦: (9) 下面以弦为例。令1 (,)()()n n n y x t Y x t ?∞==∑,其中振型函数Y n (x )满足式(2)和式(3)。代入式(9)得 1 1 (,)n n n n n n Y T Y f x t ρ??∞ ∞ ==''-=∑∑&& (10) 考虑到式(2),式(10)可改写为 2 1 1 (,)n n n n n n n Y T k Y f x t ρ??∞ ∞ ==+=∑∑&& (11) 对式(11)两边乘以Y m ,再对x 沿长度积分,并利用振型函数的正交性,得 222 (,)l l l n n n n n n Y dx Tk Y dx Y f x t dx ρ??+=???&&
第三章 弹性体的振动
第三章 弹性体的振动 §3.1 弦的振动 3.1.1 用动力学基本定律建立弦振动基本方程 在前二章里,对弹性体动力学的一般规律、基本原理和基本方程作了介绍。但不同的弹性体有其本身的力学特性,采用不同的简化假设,建立的基本方程是不相同的。因而,它们的解法也不完全一样。除了共同的动力学特性外,还有一些独特的特性,必须分别加以讨论。 弹性体按其构型可分为: (1)一维构型,它的截面尺寸比长度小得多。它有两类,一类是弦、杆、轴;一类是各种梁。 (2)二维构型,它的厚度比其它尺寸小得多。它有膜、平面应力板、弯曲板与壳等。 (3)三维构型,三向尺寸相当。它是各类实体结构。 最简单的弹性体动力学问题是弦的横向振动(图3.1)。受常张力作用的弦是一种一维弹性体。从弦上取出一个微分长度来分析,当它发生横向位移,由于张力作用产生有恢复力,它等于 x T dx ),(t x w e df dx x w T df x e 2 2??= (3.1) 图3.1 弦的横向振动 设弦的长度密度为,则在振动时的惯性力是 m dx t w m df y 2 2???= (3.2) ·1·
根据动力学的基本定律,弦横向振动的基本方程是 02 22 2=+?????f t w m x w T x (3.3) 其中是作用在弦上的横向分布载荷。 ),(t x f 3.1.2 用能量变分原理建立弦振动基本方程 弦横向振动有三种能量: (1)弦的位能 i U dx x w x w T U x L i ????= ∫210 (3.4) (2)弦的动能T dx t w t w m T L ????= ∫210 (3.5) (3)弦的外力功 e W L L L x L e w fwdx w x w T fwdx W 00 00 ||τ+=??+= ∫∫ (3.6) 其中τ=??x w T x 是张力的垂直分量。弦的哈密尔登作用量为 dt W U T L e i t )(0 +?= ∫ 由哈密尔登作用量原理给出 0}|]2121[{00 =++?????????=∫∫∫dt w dx fw x w x w T t w t w m Ldt L x L t t τδδ (3.7) 上式给出能量泛函的极值条件。经过变分运算可推出基本方程和自然边界条件。动能作用量的变分等于 dx w t w m wdx t w m dxdt x w t w m t t L t L }|{)(02 20 000 δδδ??+???=????∫∫∫∫ 和位能作用量的变分等于 dt w t w T wdx x w T dxdt x w x w T L x x L t x t L }|{020 000δδ??+??? =????∫∫∫∫ 于是,代入哈密尔顿作用量变分原理得 ||)(}{0000222200 =??+???++?????∫∫∫∫ dx w t w m dt w x w T wdxdt f t w m x w T t L L x t x t L δδτδ (3.8) ·2·
机械振动的概念 (1)
第一章绪论 1-1 机械振动的概念 振动是一种特殊形式的运动,它是指物体在其平衡位置附近所做的往复运动。如果振动物体是机械零件、部件、整个机器或机械结构,这种运动称为机械振动。 振动在大多数情况下是有害的。由于振动,影响了仪器设备的工作性能;降低了机械加工的精度和粗糙度;机器在使用中承受交变载荷而导致构件的疲劳和磨损,以至破坏。此外,由于振动而产生的环境噪声形成令人厌恶的公害,交通运载工具的振动恶化了乘载条件,这些都直接影响了人体的健康等等。但机械振动也有可利用的一面,在很多工艺过程中,随着不同的工艺要求,出现了各种类型利用振动原理工作的机械设备,被用来完成各种工艺过程,如振动输送、振动筛选、振动研磨、振动抛光、振动沉桩等等。这些都在生产实践中为改善劳动条件、提高劳动生产率等方面发挥了积极作用。研究机械振动的目的就是要研究产生振动的原因和它的运动规律,振动对机器及人体的影响,进而防止与限制其危害,同时发挥其有益作用。 任何机器或结构物,由于具有弹性与质量,都可能发生振动。研究振动问题时,通常把振动的机械或结构称为振动系统(简称振系)。实际的振系往往是复杂的,影响振动的因素较多。为了便于分析研究,根据问题的实际情况抓住主要因素,略去次要因素,将复杂的振系简化为一个力学模型,针对力学模型来处理问题。振系的模型可分为两大类:离散系统(或称集中参数系统)与连续系统(或称分布参数系统),离散系统是由集中参数元件组成的,基本的集中参数元件有三种:质量、弹簧与阻尼器。其中质量(包括转动惯量)只具有惯性;弹簧只具有弹性,其本身质量略去不计,弹性力只与变形的一次方成正比的弹簧称为线性弹簧;在振动问题中,各种阻力统称阻尼,阻尼器既不具有惯性,也不具有弹性,它是耗能元件,在有相对运动时产生阻力,其阻力与相对速度的一次方成正比的阻尼器称为线性阻尼器。连续系统是由弹性元件组成的,典型的弹性元件有杆、梁、轴、板、壳等,弹性体的惯性、弹性与阻尼是连续分布的。严格的说,实际系统都是连续系统,所谓离散系统仅是实际连续系统经简化而得的力学模型。例如将质量较大、弹性较小的构件简化为不计弹性的集中质量;将振动过程中产生较大弹性变形而质量较小的构件,简化为不计质量的弹性元件;将构件中阻尼较大而惯性、弹性小的弹性体也可看成刚体。这样就把分布参数的连续系统简化为集中参数的离散系统。 例如图1-1(a)所示的安装在混凝土基 础上的机器,为了隔振的目的,在基础下面一 般还有弹性衬垫,如果仅研究这一系统在铅垂 方向的振动,在振动过程中弹性衬垫起着弹簧 作用,机器与基础可看作一个刚体,起着质量 的作用,衬垫本身的内摩擦以及基础与周围约 束之间的摩擦起着阻尼的作用(阻尼用阻尼器 表示,阻尼器由一个油缸和活塞、油液组成。 活塞上下运动时,油液从间隙中挤过,从而造 成一定的阻尼)。这样图1-1(a)所示的系统 可简化为1-1(b)所示的力学模型。又如图1-2中假想线表示的是一辆汽车,若研究的问题是汽车沿道路行驶时车体的上下运动与俯仰运动,则可简化为图中实线所示的刚性杆的平面运动这样一个力学模型。其中弹簧代表轮胎及其悬挂系统的弹性,车体的惯性简化为平移质量及绕质心的转动惯量,轮胎及其悬挂系统的内摩擦以及地面的摩擦等起着阻尼作用,用阻尼器表示。
第8章 弹性体振动
第八章 弹性体振动 §8-1 概述 任何机器的零部件都是由质量和刚度连续分布的物体所组成,也就是说这些零部件都是弹性体。但是在很多情况下,为了使问题简化,计算简便,常常将它们简化成多自由度的离散系统来分析。然而,在有些工程实践中,却要求对弹性体振动作严密的分析,这时就不能对它进行离散化处理。因此对工程上常用的连续弹性体(如杆、轴、梁、板、壳,以及它们的组合系统)进行振动分析求出它们的固有频率和主振型,计算他们的动力响应,这在实用上和理论研究上都有非常重要的意义。 多自由度系统(离散系统)和弹性体(连续系统)是对同一个客观事物(机器零部件)的不同的分析方法,因此它们之间必然存在一定的联系和明显的区别。 x x ) a ) b (( 图8-1 多自由度系统和弹性体的动力学模型 从动力学模型上看,多自由度系统是将零部件看成由质量、刚度集中在若干点上的离散元件所组成。如图8-1(a )所示它是把一个零件分成若干段,每段的质量分成两半,分别加在两端的集中质量上。两个质量之间则用不计质量、只计刚度的弹性元件相联结。这样就形成了具有n 个集中质量(m 1、m 2、…m n )和n -1个弹簧(k 1、k 2、…、k n -1)所组成的n 个自由度的集中参数模型,其广义坐标用振动位移y i (t)表示。弹性体则将零部件看成由质量、刚度连续分布的物体所组成如图8-1(b )所示。当一个零件的分段数n →∞时,离散系统就变成连续系统,其横坐标x 也从一个离散值(x 1、x 2、…x n )变为连续函数。因此系统的广义坐标要用一个由截面位置x 和时间t 所表达的二元函数y (x ,t )来表示。这就是说,弹性体有无穷多个广义坐标,而且它们之间有一定的相互关系。 从运动方程来看,多自由度系统用一个方程数与自由度相等的常系数线性微分方程组来描述;而弹性体则要用偏微分方程式来描述,其阶数决定于所研究的对象和振动形态。 从振动特性来看,多自由系统振动特性的推广即为弹性体的振动特性;而弹性体振动特性的近似即为多自由度系统的振动特性。 在本章中,我们只研究弹性体的最简单情况,即等截面的杆、轴的振动,而且假设弹性体的质量和刚度均匀分布,在振动过程中弹性体不产生裂纹,即要求广义坐标的变化是连续的。此外,我们的讨论只局限在线性范围内,即认为弹性体的应力应变关系服从虎克定律,而且是均质各向同性的。
机械振动习题及答案
第一章概述 1?一简谐振动,振幅为,周期为,求最大速度和加速度。 解: g 1 X max W* X max 2* * f * X max 2* * * A 8.37cm/S X max w 2 * x max (2* * f )2* x max (2* *^)2* A 350.56cm/ s 2 2. —加速度计指示结构谐振在 80HZ 时具有最大加速度 50g ,求振 动的振幅。(g=10m/s2) 解: X max W 2 *X max (2* *f)2*X max x max X max /(2* * f)2 (50*10) /(2*3.14*80) 2 1.98mm 3. 一简谐振动,频率为 10Hz ,最大速度为s ,求谐振动的振幅、周期、最大加速度。 解: x max X max /(2* * f) 4.57/(2*3.14*10) 72.77mm g g X max W * X max 2* * f * X max 2*3.14*10*4.57 4. 机械振动按激励输入类型分为哪几类?按自由度分为哪几类? 答:按激励输入类型分为自由振动、强迫振动、自激振动 按自由度分为单自由度系统、多自由度系统、连续系统振动 1 丄 f 10 0.1s 287.00m/s
5.什么是线性振动?什么是非线性振动?其中哪种振动满足叠加原理? 答:描述系统的方程为线性微分方程的为线性振动系统,如I0&& mga 0 描述系统的方程为非线性微分方程的为非线性振动系统mgas in 线性系统满足线性叠加原理 6.请画出同一方向的两个运动: 捲⑴2sin(4 t),X2(t) 4sin(4 t)合成的的振动波形 7.请画出互相垂直的两个运动: X i(t) 2sin(4 t),X2(t) 2sin(4 t)合成的结果。 如果是x1(t) 2sin(4 t /2),x2(t) 2sin(4 t) 第二章单自由度系统 1. 物体作简谐振动当它通过距平衡位置为0.05m, 0.1处时的速度分别为0.2m/和0.08m/s 求其振动周期、振幅和最大速度 物体放在水平台面上,当台面沿铅垂方向作频率为5Hz的简谐振动时,要使物体不跳离平台, 对台面的振幅有何限制?
机械振动学复习试题
(一) 一、填空题(本题15分,每空1分) 1、不同情况进行分类,振动(系统)大致可分成,( )和非线性振动;确定振动和( );( )和强迫振动;周期振动和( );( )和离散系统。 2、在离散系统中,弹性元件储存( ),惯性元件储存( ),( )元件耗散能量。 3、周期运动的最简单形式是( ),它是时间的单一( )或( )函数。 4、叠加原理是分析( )的振动性质的基础。 5、系统的固有频率是系统( )的频率,它只与系统的( )和( )有关,与系统受到的激励无关。 二、简答题(本题40分,每小题10分) 1、 简述机械振动的定义和系统发生振动的原因。(10分) 2、 简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。(10分) 3、 共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?(10分) 4、 多自由系统振动的振型指的是什么?(10分) 三、计算题(本题30分) 1、 求图1系统固有频率。(10分) 2、 图2所示为3自由度无阻尼振动系统。 (1)列写系统自由振动微分方程式(含质量矩阵、刚度矩阵)(10分); (2)设1234t t t t k k k k k ====,123/5I I I I ===,求系统固有频率(10分)。 解:1)以静平衡位置为原点,设123,,I I I 的位移123,,θθθ为广义坐标,画出123,,I I I 隔离体,根据牛顿第二定律得到运动微分方程: 1111212222213233333243()0 ()()0()0 θθθθθθθθθθθθθ?++-=? +-+-=?? +-+=?t t t t t t I k k I k k I k k 图1 图2
机械振动试题及答案
一、填空题 1、机械振动按不同情况进行分类大致可分成(线性振动)和非线性振动;确定性振动和(随机振动);(自由振动)和强迫振动,连续振动和离散系统。 2、(弹性元件)元件、(惯性元件)元件、(阻尼元件)元件是离散振动系统的三个最基本元素。 3、在振动系统中,弹性元件存储(势能)、惯性元件存储(动能)、(阻尼元件)元件耗散能量。 4、系统固有频率主要与系统的(质量)和(刚度)有关,与系统受到的激励无关。 5、研究随机振动的方法是(数理统计),工程上常见的随机过程的数字特征有:(均值)(方差)(自相关函数)和(互相关函数)。 6、周期运动的最简单形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。 7、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的激励无关。 8、简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。 9、工程上分析随机振动用(数学统计)方法,描述随机过程的最基本的数字特征包括均值、方差、(自相关函数)和(互相关函数)。 10、机械振动是指机械或结构在(静平衡)附近的(弹性往复)运动。 11、单位脉冲力激励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。 12、叠加原理是分析(线性振动系统)和(振动性质)的基础。 二、简答题 1、什么是机械振动?振动发生的内在原因是什么?外在原因是什么? 答:机械振动是指机械或结构在它的静平衡位置附近的往复弹性运动。 振动发生的内在原因是机械或结构具有在振动时储存动能和势能,而且释放动能和势能并能使动能和势能相互转换的能力。 外在原因是由于外界对系统的激励或者作用。 2、机械振动系统的固有频率与哪些因素有关?关系如何? 答:机械振动系统的固有频率与系统的质量矩阵、刚度矩阵和阻尼有关。 质量越大,固有频率越低;刚度越大,固有频率越高;阻尼越大,固有频率越低。 3、从能量、运动、共振等角度简述阻尼对单自由度系统振动的影响。 答:从能量角度看,阻尼消耗系统的能力,使得单自由度系统的总机械能越来越小;
连续体振动讲解
Vibration of Countinuous System 1. Euler—Bernoulli Beam Euler—Bernoulli运动过程中没有考虑剪切效应的影响。 Euler—Bernoull Beam:变形前垂直于梁中心线的截面在变形后仍保持垂直于梁的中心线。 Timoshenko Beam:Euler—Bernoull 梁中并没有考虑梁的剪切变形,在实际工程中,会存在梁的剪切变形,变形后截面与中心线存在一个夹角,截面的转角变为 y x θγ ? =- ? 中性面定义:+++ 变形的几何关系: 假设距离中性层距离为h的层为b b -。根据平面假设,单元体d x变形后层面b b -为b b '' - 其中,dθ为变形的角度 b b o o h C C' dθ o o'o' b' b' M M R h A' B' A ?B?
M C 应变的表达式为 ()d -d d R h R h R R θθεθ+= = 弯矩的表达式为 2d d d A A A E EI M h A h E A h A R R σε=== =??? 其中,I 为截面的惯性矩。 转角的表达式,A 点的转角为A ?,B 点的转角为B ? A y x ??= ? 对于B 点,假定转角对位置坐标线性变化,有 2 2 d d A B A x x y y x x x ????=+ ???=+?? 因此,弯曲的角度d θ表示为 22d d B A y x x θ???=-=? 由于梁弯曲变形为小变形,有如下 d d R x θ= 得到 221y R x ?=? 得到弯矩的表达式
2M EI x =? 1.1 Newton 2th law Equation. y x 取长度为L 的梁中的微元体研究,单元体的长度为d x 。假定受到与位置坐标x 相关的载荷()p x 的作用,考虑到变截面梁,假定截面面积为()A x 。梁的密度表示为位置坐标x 的函数()x ρ。单元体受力情况如图++所示。其中M 为弯矩(bending),V 为剪力(shear force) 这里认为弯矩M 与剪力V 在位置坐标系下随x 线性变化,因此单元体右端的弯矩和剪力分别表示为如下形式 d right M M M x x ?=+ ? (1)
机械振动习题及答案
机械振动习题及答案 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
第一章 概述 1.一简谐振动,振幅为,周期为,求最大速度和加速度。 解: 2.一加速度计指示结构谐振在80HZ 时具有最大加速度50g ,求振动的振幅。(g=10m/s2) 解:.. 22max max max *(2**)*x w x f x π== 3.一简谐振动,频率为10Hz ,最大速度为s ,求谐振动的振幅、周期、最大加速度。 解: 4. 机械振动按激励输入类型分为哪几类按自由度分为哪几类 答:按激励输入类型分为自由振动、强迫振动、自激振动 按自由度分为单自由度系统、多自由度系统、连续系统振动 5. 什么是线性振动什么是非 线性振动其中哪种振动满足叠加原理 答:描述系统的方程为线性微分方程的为线性振动系统,如00I mga θθ+= 描述系统的方程为非线性微分方程的为非线性振动系统0sin 0I mga θθ+= 线性系统满足线性叠加原理 6. 请画出同一方向的两个运动:1()2sin(4)x t t π=,2()4sin(4)x t t π=合成的的振动波形
7.请画出互相垂直的两个运动:1()2sin(4)x t t π=,2()2sin(4)x t t π=合成的结果。 如果是1()2sin(4/2)x t t ππ=+,2()2sin(4)x t t π= 第二章 单自由度系统 1. , 0.05m, 0.1m 0.2m/s 0.08m/s 一物体作简谐振动当它通过距平衡位置为处时的速度分别为和。 求其振动周期、振幅和最大速度。 2. Hz 一物体放在水平台面上,当台面沿铅垂方向作频率为5的简谐振动时,要使物体不跳离平台,对台面的振幅有何限制? 3. 55123 2.5kg, 210N/m, 310N/m m k k k ===?=?写出图示系统的等效刚度的表达式。当时,求系统的固有频率。 123 k k k 分析表明:和并联,之后与串联1212 eq k k k k k =+和并联后的等效刚度:
第6章 弹性体的一维振动题解
126 习题 6-1 一等直杆沿纵向以等速v 向右运动,求下列情况中杆的自由振动∶ (1) 杆的左端突然固定;杆的右端突然固定;杆的中点突然固定。 解;(1)杆的左端突然固定; 杆的初始条件为:()()0,00u x u x == (),0u x V = 由式(8-15),(8-16)可知,1,3,52i i a p i l π= =,… ,...3,2,1i ,x 2l i sin D x)U ~i i ==π( 由归一化条件2 sin 12l i i x A D dx l πρ? ?= ??? ? 得i D = 即正则振型为,...3,2,1i ,x 2l i sin Al 2 x)U ~ i ==πρ( 由式(8-39)得正则坐标表示的初始条件为 ()0 0sin 2l i i i A V D xdx l πη ρ=? 2i l A V D i ρπ = ()00i η=,i=1,3,5,… 由式(8-40)得()0sin i i i i p t p ηη= ,进而有: t 2l a i sin 2l x i sin i 1a 8Vl t sinp a i 2l i 2l AVD 2l x i sin D )t (U ~ )t ,x (u ,... 3,1i 2 2 i i ,... 3,1i i i ,...3,1i i ∑ ∑ ∑ ∞ =∞ =∞ == = = πππππρπη (2)杆的右端突然固定; 杆的初始条件为:()()0,00u x u x == (),0u x V = 由式(8-15),(8-16)可知,1,3,52i i a p i l π= =,…
第7章:连续系统的振动
兰州理工大学李有堂编著 机械系统动力学 第7章 连续系统的振动
7.1 引言 实际的物理系统都是由弹性体组成的系统,通常为连续系统。 离散系统是连续系统的近似模型,当其近似程度不能满足实际要求时,必须增加模型的自由度,或者采用连续模型。 连续模型是离散模型自由度无限增加时的极限。连续系统是具有无限多个自由度的系统。 主要讨论可以获得精确解的问题。弦的横向振动、杆的纵向振动和扭转振动、梁的弯曲振动
7.2 弦的横向振动 ?弦:只能承受拉力,而抵抗弯曲及压缩的能力很弱。 ?钢索、电线、电缆和皮带等柔性体构件?假设: 材料是均匀连续和各向同性的; 材料变形在弹性范围,服从虎克定律; 运动是微幅的
如图所示为一段长度为l 、两端固定的弦的横向振动的模型,f (x ,t )是作用在弦上的载荷密度,弦的线密度为ρ。 T ——弦上的张力,近似为常量; ——时刻t 张力T 与x 轴的夹角 ——时刻t 弦上x 处的横向位移量 (,)x t (,)y x t
沿y 方向的运动微分方程为 2 2 (,) sin (,)sin (,)y x t T x dx t T x t dx t θθρ?+-=?对于微幅振动 sin tan y x θθθ?≈≈≈ ?(,)(,)x dx t x t dx x θ θθ?+=+?22 22 (,)(,)y x t y x t T x t ρ??=??T αρ =22 222 (,)(,)y x t y x t x t α??=??弦的振动微分方程
◆ 是一个偏微分方程 ◆ 对离散系统,运动是一种“同步运动” ◆ 弹性体系统即连续系统也应为同步运动,同时 达到极大值,同时过零点,因而整个弦的形状在振动中保持不变 ◆ 弦上各点随时间变化的位移可以分解为两部分的乘积 22 2 22 (,)(,)y x t y x t x t α??=??(,)()() y x t Y x t Φ=分离变量
机械振动基础 试卷
一、 填空题 ( 本大题共5小题,每小题2分,共10分 ) 1、 简谐振动的三要素是 振幅 、 频率 和 初相位 。 2、 不论隔力还是隔幅,当频率比λ满足 2λ> 时,隔振器才具有隔振效果。 3、 单自由度系统欠阻尼振动频率d ω,阻尼比ζ和固有频率n ω的关系为 21d n ωωζ=- 。 4、 多自由度系统中加速度频响函数矩阵的元素()i j H ω表示的物理意义是指: 幅值是指在系 统的第j 个自由度上施加单位幅值正弦激励后系统第i 个自由度上的加速度稳态响应幅值;幅角是指上述加速度响应滞后(超前)激励的相位角 。 5、 直梁的自由端 剪力 和 弯矩 为零。 二、 判断题 ( 本大题共5小题,每小题2分,共10分 ) 1、 叠加原理适用于线性和非线性系统。(×) 2、 旋转机械中,不平衡质量会引起系统产生振动。(√) 3、 单自由度系统共振时系统呈阻尼特性。(√) 4、 瑞利阻尼是比例阻尼。(√) 5、 无限自由度系统的振动方程是一个常微分方程。(×) 三、 解答题 ( 本大题共4小题,共60分 ) 1、 图示系统中不计刚性杆的质量,试建立系统的振动微 分方程,并求系统的固有频率。(10分) 解:取广义坐标为θ,顺时针为正方向,取质量块m 进行受力分析 厦门大学《机械振动基础》课程试卷 物理与机电工程 学院 航空系 2009年级 各 专业 主考教师:张保强 试卷类型:(A 卷)
根据动量矩定理得: 2sin cos ml k a a θθθ=-??&& 对于微振动,sin ,cos 1θθθ≈≈,化简得到系统运动微分方程 220ml k a θθ+?=&& 系统固有频率为 n ω=2、 试推导单自由度欠阻尼振动系统的单位脉冲响应函数表达式。(10分) 解:受单位脉冲激励的单自由度欠阻尼系统运动方程为 ()()()1()mu t cu t ku t t δ++=?&&& 初始条件(0)(0)0u u ==&。 设脉冲力的作用时间区间是[0,0]+, 根据冲量定理:1(0)(0)mu mu +=-&& 所以1 (0)u m += &,因此初始条件变为1(0)0,(0)u u m ++==&,所以 ()()()0 1 (0)0,(0)mu t cu t ku t u u m ++++=== &&&& 因此得到 1sin ,0 ()()0, 0n t d d e t t m u t h t t ζωωω-?≥? ==??
第三章 弹性体振动学
第3章弹性体振动学简介 在以上的讨论中,我们都包含着这样的假定:振动系统的质量是集中于一点的,即质量块的密度分布是均匀的;弹簧的压缩与伸长也是均匀的。当然,涉及的其他参量,例如摩擦阻尼的分布同样也应是均匀的。总而言之,描述系统的参量都作为同空间分布无关的集总参数处理的。这种系统,我们称之为集总参数系统②。在这种情况下,整个系统的运动只要 一个时间变量‘就可以完全描述。采取这种简化的方法处理问题,可以避免繁杂的数学运算,并可获得研究物体振动的一些基本规律。这在本章的开头就已经加以说明。 事实上,物体的大小是有限的,而且在一般情况下,其线度大多数都和声波的波长可以比拟。这时,“质点”的假定就不再成立。在许多情况下,质量在空间均有一连续的空间分布,甚至在空间某一部分的质量本身还具有弹性和阻尼,这种系统称为分布参数系统。具有这种性质的物体称为弹性体。例如,扬声器的纸盆与传声器的振膜,它们的质量在空间都是 连续分布的,而且质量的每一部分又具有弹性与阻尼的特性。描述这类物体的振动,如果只用时间一个变量,显然是不够的,还必须引入空间位置的变量。这时变量就将多达四个,即空间位置变量X、y、Z和时间变量‘,因此,问题的求解也比较复杂。 作为研究问题的理论基础,对于几何形状比较简单的弹性体,例如,弦、棒、膜等的分析研究。分析它们的振动规律,不仅具有重要的理论意义,而且对于实际问题的理解也是十分重要的。在录音中经常要遇到的各种乐器,从弦乐器、吹奏乐器直至打击乐器,无不涉及弹,r生体的振动问 本节不可能进行详细讨论,只想从物理意义上作某些介绍,以求有一概念 性的了解。需要深入了解的读者可参阅有关文献。 3.1 张紧的弦 所有的弦乐器,不论它是拉弦乐器、拨弦乐器还是敲弦乐器,几乎都是依靠张紧的弦振动发声的。一般地说,弦的振动方式有两种:一种是振动的方向与振动的传播方向(即与弦的方向)相一致,这种振动叫做纵振动;另一种是振动方向与振动的传播方向相垂直,这种振动称为横振动。尽管弦振动包含着这两种不同的振动形式,但在实际问题中,往往横振动 具有更加重要的意义。例如,对于拉弦乐器来说,重要的是应使其产生横振动,而应尽可能避免纵振动的产生。纵振动产生的音,比长度相同的弦的横振动产生的音要高得多。在演奏拉弦乐器时,如果同时激发了这两种振动方式,所发出的声音将会给人以一种很不愉快的感觉。初学小提琴者奏出的那种令人难受的声音就是一个典型的例子。 对于截面积与密度均匀、两断固定并张紧的弦而言,其振动方程是: (3.1.1) 31‘ C a2‘