matlab课后习题标准答案-(附图)
Get清风MATLAB教程a第5章习题解答张志涌
MATLAB教程2012a第5章习题解答-张志涌第5章 数据和函数的可视化习题5及解答1 椭圆的长、短轴2,4==b a ,用“小红点线〞画椭圆⎩⎨⎧==tb y ta x sin cos 。
〔参见图p5-1〕〖解答〗 clf a=4;b=2;t=0:pi/80:2*pi; x=a*cos(t); y=b*sin(t);plot(x,y,'r.','MarkerSize',15) axis equal xlabel('x') ylabel('y')shg-4-3-2-101234-3-2-1123xy2 根据表达式θρcos 1-=绘制如图p5-2的心脏线。
〔提示:采用极坐标绘线指令polar 〕〖解答〗 clftheta=0:pi/50:2*pi;rho=1-cos(theta);h=polar(theta,rho,'-r');%极坐标绘线指令。
h 是所画线的图柄。
set(h,'LineWidth',4) %利用set 设置h 图形对象的“线宽〞axis square %保证坐标的圆整性0.51 1.523021060240902701203001503301800ρ=1-cos θ3 A,B,C 三个城市上半年每个月的国民生产总值如见表p5.1。
试画出如图p5-3所示的三城市上半年每月生产总值的累计直方图。
表p5.1 各城市生产总值数据〔单位:亿元〕城市 1月 2月 3月 4月 5月 6月 A 170 120 180 200 190 220 B 120 100 110 180 170 180 C 70508010095120〖目的〗● 借助MATLAB 的帮助系统,学习直方图指令polar 的使用。
● bar 指令常用格式之一:bar(x,Y,'style') 。
x 是自变量列向量;Y 是与x 行数相同的矩阵,Y 的每一行被作为“一组〞数据;style 取stacked 时,同一组数据中每个元素对应的直方条被相互层叠。
第5章MATLAB绘图_习题答案
第5章MATLAB绘图习题5一、选择题1.如果x、y均为4×3矩阵,则执行plot(x,y)命令后在图形窗口中绘制()条曲线。
DA.12B.7C.4D.32.下列程序的运行结果是()。
Ax=0:pi/100:2*pi;forn=1:2:10plot(n*sin(x),n*cos(x))holdonendaxissquareA.5个同心圆B.5根平行线C.一根正弦曲线和一根余弦曲线D.5根正弦曲线和5根余弦曲线3.命令text(1,1,'{\alpha}+{\beta}')执行后,得到的标注效果是()。
C A.{\alpha}+{\beta}B.αβ}C.α+βD.αβ4.subplot(2,2,3)是指()的子图。
AA.两行两列的左下图B.两行两列的右下图C.两行两列的左上图D.两行两列的右上图x的曲线绘制成直线,应采用的绘图函数是()。
C5.要使函数y=2eA.polarB.semilogxC.semilogyD.loglog6.下列程序的运行结果是()。
B[x,y]=meshgrid(1:5);surf(x,y,5*ones(size(x)));A.z=x+y平面B.与xy平面平行的平面C.与xy平面垂直的平面D.z=5x平面7.下列函数中不能用于隐函数绘图的是()。
DA.ezmeshB.ezsurfC.ezplotD.plot38.下列程序运行后,看到的图形()。
Ct=0:pi/20:2*pi;[x,y]=meshgrid(-8:0.5:8);z=sin(sqrt(x.^2+y.^2))./sqrt(x.^2+y.^2+eps);surf(x,y,z)view(0,90);axisequalA.像墨西哥帽子B.是空心的圆C.边界是正方形D.是实心的圆9.下列程序运行后得到的图形是()。
A[x,y]=meshgrid(-2:2);z=x+y;i=find(abs(x)<1&abs(y)<1);z(i)=NaN;surf(x,y,z);shadinginterpA.在一个正方形的正中心挖掉了一个小的正方形B.在一个正方形的正中心挖掉了一个小的长方形C.在一个正方形的上端挖掉了一个小的正方形D.在一个正方形的下端挖掉了一个小的正方形10.在使用MATLAB“绘图”选项卡中的命令按钮绘图之前,需要()。
中南大学matlab课后习题(10)
中南大学matlab课后习题(10)Unit 1实验内容1.答:用help命令可以查询到自己的工作目录。
输入help命令:help <函数名>2.答:MATLAB的主要优点:通过例1-1至例1-4的验证,MATLAB的优点是MATLAB以矩阵作为数据操作的基本单位,使得矩阵运算变得非常简捷,方便,高效。
还提供了丰富的数值计算函数。
MATLAB绘图十分方便,只需输入绘图命令,MATLAB便可自动绘出图形。
3.答:INV(X) is the inverse of the square matrix X。
A warning message is printed if X is badly scaled or nearly singular. PLOT(X,Y) plots vector Y versus vector X. If X or Y is a matrix, then the vector is plotted versus the rows or columns of the matrix, whichever line up. If X is a scalar and Y is a vector, length(Y) disconnected points are plotted. PLOT(Y) plots the columns of Y versus their index. If Y is complex, PLOT(Y) is equivalent to PLOT(real(Y),imag(Y)).In all other uses of PLOT, the imaginary part is ignored. For vectors, MAX(X) is the largest element in X. For matrices,MAX(X) is a row vector containing the maximum element from each column. For N-D arrays, MAX(X) operates along the first non-singleton dimension. [Y,I] = MAX(X) returns the indices of the maximum values in vector I. If the values along the first non-singleton dimension contain more than one maximal element, the index of the first one is returned. ROUND(X) rounds the elements of X to the nearest integers. MAX(X,Y) returns an array the same size as X and Y with the largest elements taken from X or Y. Either one can be a scalar。
汽车理论课后习题答案及MATLAB编程
汽车理论课后习题答案—附MATLAB编程教材:汽车理论(第5版)清华大学余志生主编机械工业出版社出版本文档包含第三章 4.3 5.11 6.2 6.4 6.5所要求的MATLAB编程其它习题答案:第一章:1.1 1.2 1.7 1.8第二章:2.2 2.3 2.4第三章第四章:4.1 4.2 4.3 4.5第五章:5.1 5.8 5.10 5.11 5.12 5.14 5.17第六章:6.1~6.5见本作者另一百度文库文档。
获取方法:点击左上角本作者的昵称,进入本作者的文库,《汽车理论课后习题答案(含MATLAB编程)》第三章:m=3880;%总质量g=9.8;%重力加速度r=0.367;%车轮半径eta_t=0.85;%传动系机械效率f=0.013;%滚动阻力系数CDA=2.77;%空气阻力系数*迎风面积i0=[5.175.435.836.176.33];%主减速器传动比If=0.218;%飞轮转动惯量Iw1=1.798;Iw2=3.598;%两前轮/四后轮转动惯量Iw=Iw1+Iw2;ig4=[6.09 3.091.711];%4挡变速器传动比ig5=[5.56 2.7691.64410.793];%5挡变速器传动比n=600:1:4000;%发动机转速Tq=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;%4挡发动机for i=1:5Ft1=Tq*ig4(1)*i0(i)/r;%各档对应转速下的驱动力Ft2=Tq*ig4(2)*i0(i)/r;Ft3=Tq*ig4(3)*i0(i)/r;Ft4=Tq*ig4(4)*i0(i)/r;u1=0.377*r*n/(i0(i)*ig4(1));%各档对应转速下的车速u2=0.377*r*n/(i0(i)*ig4(2));u3=0.377*r*n/(i0(i)*ig4(3));u4=0.377*r*n/(i0(i)*ig4(4));F1=m*g*f+CDA*u1.^2/21.15;%各档对应转速下的行驶阻力F2=m*g*f+CDA*u2.^2/21.15;F3=m*g*f+CDA*u3.^2/21.15;F4=m*g*f+CDA*u4.^2/21.15;delta1=1+(Iw+If.*ig4(1).^2.*i0(i).^2.*eta_t)./(m.*r.^2);%汽车旋转质量换算系数delta2=1+(Iw+If.*ig4(2).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta3=1+(Iw+If.*ig4(3).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta4=1+(Iw+If.*ig4(4).^2.*i0(i).^2.*eta_t)./(m.*r.^2);a1=(Ft1-F1)/(delta1*m);%加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);b1=1./a1;%加速度倒数b2=1./a2;b3=1./a3;b4=1./a4;figure(1)subplot(2,3,i)plot(u1,b1,u2,b2,u3,b3,u4,b4);title('加速度倒数-速度曲线');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')gtext(['i0='num2str(i0(i))]);%计算采用2挡起步加速至96.6km/h的原地起步加速时间u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=96.6;x1=[];x2=[];x3=[];x4=[];y=3401;for j=1:3401if u3(j)<=u3minx1=[j];endendq1=max(x1);ua3=u3(q1:y);a3=b3(q1:y);for k=1:3401if u4(k)<=u4minx2=[k];elseif u4(k)<=u4maxx3=[k];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);a4=b4(q2:q3);s2=trapz(b2,u2);%二挡运行时间s3=trapz(ua3,a3);%三挡运行时间s4=trapz(ua4,a4);%四挡运行时间s=[s2s3s4];t=sum(s)*1000/3600;%总时间disp('t=');disp(t);gtext(['t='num2str(t)'s']);Pe1=Ft1.*u1./3600;%各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;endPemax=max([max(Pe1)max(Pe2)max(Pe3)max(Pe4)]);%发动机最大功率disp('90%负荷');Pe=0.9*Pemax%90%负荷rou=0.7;Ua=0.377*r*3401./(i0.*ig4(4));B=[1233.9-84.4782.9788-0.0474490.00028230];%负荷特性曲线拟合公式系数,对应n=3403r/min for i=1:5b=B*[1Pe Pe^2Pe^3Pe^4]';%根据拟合公式计算比油耗Qs4(i)=Pe.*b./(1.02.*Ua(i).*rou.*g);%百公里油耗量enddisp('Qs4=');disp(Qs4);tt=[48.423546.351141.555733.379630.5564];figure(2)plot(Qs4,tt,'*')hold onxi=25:0.001:31;pp=interp1(Qs4,tt,xi,'cubic');plot(xi,pp)title('燃油经济性-加速时间曲线');xlabel('燃油经济性--等速百公里油耗(L/100km)');ylabel('动力性--原地起步加速时间(s)');gtext('5.17')gtext('5.43')gtext('5.83')gtext('6.17')gtext('6.33')%5挡发动机for i=1:5Ft1=Tq*ig5(1)*i0(i)/r;%各档对应转速下的驱动力Ft2=Tq*ig5(2)*i0(i)/r;Ft3=Tq*ig5(3)*i0(i)/r;Ft4=Tq*ig5(4)*i0(i)/r;Ft5=Tq*ig5(5)*i0(i)/r;u1=0.377*r*n/(i0(i)*ig5(1));%各档对应转速下的车速u2=0.377*r*n/(i0(i)*ig5(2));u3=0.377*r*n/(i0(i)*ig5(3));u4=0.377*r*n/(i0(i)*ig5(4));u5=0.377*r*n/(i0(i)*ig5(5));F1=m*g*f+CDA*u1.^2/21.15;%各档对应转速下的行驶阻力F2=m*g*f+CDA*u2.^2/21.15;F3=m*g*f+CDA*u3.^2/21.15;F4=m*g*f+CDA*u4.^2/21.15;F5=m*g*f+CDA*u5.^2/21.15;delta1=1+(Iw+If.*ig5(1).^2.*i0(i).^2.*eta_t)./(m.*r.^2);%汽车旋转质量换算系数delta2=1+(Iw+If.*ig5(2).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta3=1+(Iw+If.*ig5(3).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta4=1+(Iw+If.*ig5(4).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta5=1+(Iw+If.*ig5(5).^2.*i0(i).^2.*eta_t)./(m.*r.^2);a1=(Ft1-F1)/(delta1*m);%加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);a5=(Ft5-F5)/(delta5*m);b1=1./a1;%加速度倒数b2=1./a2;b3=1./a3;b4=1./a4;b5=1./a5;figure(3)subplot(2,3,i)plot(u1,b1,u2,b2,u3,b3,u4,b4,u5,b5);title('加速度倒数-速度曲线');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')gtext('1/a5')gtext(['i0='num2str(i0(i))]);%计算采用2挡起步加速至96.6km/h的原地起步加速时间u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=max(u4);u5min=u4max;u5max=96.6;x1=[];x2=[];x3=[];x4=[];x5=[];y=3401;for j=1:3401if u3(j)<=u3minx1=[j];endendq1=max(x1);ua3=u3(q1:y);a3=b3(q1:y);for k=1:3401if u4(k)<=u4minx2=[k];endendq2=max(x2);ua4=u4(q2:y);a4=b4(q2:y);for l=1:3401if u5(l)<=u5minx3=[l];elseif u5(l)<=u5maxx4=[l];endendq2=max(x2);q3=max(x3);q4=max(x4);ua5=u5(q3:q4);a5=b5(q3:q4);s2=trapz(b2,u2);%二挡运行时间s3=trapz(ua3,a3);%三挡运行时间s4=trapz(ua4,a4);%四挡运行时间s5=trapz(ua5,a5);%五挡运行时间s=[s2s3s4s5];t=sum(s)*1000/3600;%总时间disp('t=');disp(t);gtext(['t='num2str(t)'s']);Pe1=Ft1.*u1./3600;%各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;Pe5=Ft5.*u5./3600;endPemax=max([max(Pe1)max(Pe2)max(Pe3)max(Pe4)max(Pe4)]);%发动机最大功率disp('90%负荷');Pe=0.9*Pemax%90%负荷rou=0.7;Ua=0.377*r*3401./(i0.*ig4(4));B=[1233.9-84.4782.9788-0.0474490.00028230];%负荷特性曲线拟合公式系数,对应n=3403r/min for i=1:5b=B*[1Pe Pe^2Pe^3Pe^4]';%根据拟合公式计算比油耗Qs5(i)=Pe.*b./(1.02.*Ua(i).*rou.*g);%百公里油耗量enddisp('Qs5=');disp(Qs5);tt=[93.973058.283444.678445.366744.9793];figure(2)plot(Qs5,tt,'*')hold onxi=30:0.001:100;pp=interp1(Qs5,tt,xi,'cubic');plot(xi,pp)%title('燃油经济性-加速时间曲线');%xlabel('燃油经济性--等速百公里油耗(L/100km)');%ylabel('动力性--原地起步加速时间(s)');gtext('5.17')gtext('5.43')gtext('5.83')gtext('6.17')gtext('6.33')运行结果:t=48.4235t=46.3511t=41.5557t=33.3796t=30.556490%负荷Pe=55.5647Qs4=25.103126.365628.307829.958730.7356图1加速度倒数-速度曲线图2燃油经济性-加速时间曲线4.3%空载(no load)—1;满载(full load)—2m1=4080;m2=9290;hg1=0.845;hg2=1.170;L=3.950;a1=2.100;a2=2.950;b1=L-a1;b2=L-a2;beta=0.38;%利用附着系数与制动强度的关系曲线z=0:0.01:1;phi_f1=L*beta.*z./(b1+z*hg1);%前轮利用附着系数(空载)phi_r1=L*(1-beta).*z./(a1-z*hg1);%空载时后轮利用附着系数(空载)phi_f2=L*beta.*z./(b2+z*hg2);%前轮利用附着系数(满载)phi_r2=L*(1-beta).*z./(a2-z*hg2);%后轮利用附着系数(满载)phi=z;%最理想情况figure(1);plot(z,phi_f1,'g--',z,phi_f2,'g-',z,phi_r1,'b--',z,phi_r2,'b-',z,phi,'k-'); axis([0,1,0,1]);grid on;box off;axis square;title('利用附着系数与制动强度的关系曲线');xlabel('制动强度z/g');ylabel('利用附着系数{\phi}');%ECE法规要求界限hold on;z1=0.2:0.01:0.8;z2=0.15:0.01:0.3;z3=0.3:0.01:1;phi1=(z1+0.07)/0.85;phi2=z2-0.08;phi3=z2+0.08;phi4=(z3-0.02)/0.74;plot(z1,phi1,'r-.',z2,phi2,'r-.',z2,phi3,'r-.',z3,phi4,'r-.'); legend('{\phi}_{f}(空载)','{\phi}_{f}(满载)','{\phi}_{r}(空载)',...'{\phi}_{r}(满载)','{\phi}=z','ECE法规要求界限');legend('Location','northwest');%制动效率曲线Ef1=z./phi_f1*100;Er1=z./phi_r1*100;Ef2=z./phi_f2*100;Er2=z./phi_r2*100;figure(2);plot(phi_f1,Ef1,'k',phi_r1,Er1,'k',phi_f2,Ef2,'b',phi_r2,Er2,'b'); axis([0,1,0,100]);grid on;box off;axis square;title('制动效率曲线');xlabel('附着系数{\phi}');ylabel('制动效率(%)');text(0.25,90,'E_f');text(0.6,88,'满载');text(0.8,90,'E_r');text(0.7,65,'空载');text(0.72,72,'E_r');程序运行结果如下:图1图2 5.11L=3.048;K=0.0024;i=20;ua=0:0.01:120;f=1/L.*(1./(3.6./ua+K.*ua./3.6));syms uF(u)=(1/L.*(1./(1./u+K.*u)))./i;plot(ua,f,'b-');xlabel('u_a(km/h)');ylabel('\omega_r/\delta)_s');F(22.35)运行结果:ans=0.1667386094155036.2f=0.1:0.1:100;Gq1=5.12*10^(-5)./f.^2;Gq2=2.02*10^(-3).*f./f;Gq3=7.98*10^(-2).*f.^2;figure(1);loglog(f,Gq1,'b-');box off;axis square;title('位移功率谱密度'); xlabel('f/Hz');ylabel('G_q(f)/(m^2s)');figure(2);loglog(f,Gq2,'b-');box off;axis square;title('速度功率谱密度'); xlabel('f/Hz');ylabel('G_q_''(f)/(m^2/s)');figure(3);loglog(f,Gq3,'b-');box off;axis square;title('加速度功率谱密度'); xlabel('f/Hz');ylabel('G_q_''_''(f)/(m^2/s^3)');运行结果如下:6.4f1=0.1:0.01:1;f2=1:0.01:10;G1=0.010106.*f1.^2;G2=0.010106.*f2./f2;loglog(f1,G1,'b-');hold onloglog(f2,G2,'b-');title('车身加速度的功率谱密度'); xlabel('f/Hz');ylabel('G_z_''_''(f)/m^-^1'); axis([0.1,10,0.0001,0.1]);运行结果如下:6.51.计算说明1)①幅频特性()122222114z q λζλγ⎡⎤-+⎢=⎢⎥∆⎣⎦,其中0ωλω=,()2222222111141λλγζλγλμμ⎡⎤⎡⎤⎛⎫⎛⎫∆=-+--+-⎢⎥⎢⎥ ⎪ ⎪⎝⎭⎝⎭⎣⎦⎣⎦;()12222222211414z z ζλλζλ⎡⎤+⎢=⎢⎥-+⎣⎦;()1222222221414s s s s s p z ζλλζλ⎡⎤+⎢=⎢⎥-+⎣⎦,其中s s ωλω=;②均方根谱()()221~j 2z q H f f ωππ=;()()222~j 2z qH f f ωππ== ;()()2221~1j 2p qz z H f f z qωππ== ;③其他值()0.5360q q G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.536110z z G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.536220z z G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.5360a a G f df σ⎡⎤=⎢⎥⎣⎦⎰()()()()()()13622w 012222412.5362202412.5d 12.5 0.5d d 1d d 4a a a a a a W f G f f f G f f G f f G f f G f f f ⎡⎤=⎢⎥⎣⎦⎡⎤⎛⎫⎛⎫=+++⎢⎥ ⎪ ⎪⎝⎭⎢⎥⎝⎭⎣⎦⎰⎰⎰⎰⎰其中,()()()()()0.5 0.52 2441 412.512.512.536f f f W f f f f <<⎧⎪⎪<<⎪=⎨<<⎪⎪<<⎪⎩()aw w 020lg L a =2)见1)中计算式3)()()()22004q q q G f G G n n uωπ== ()()()1122363622d ~00d d dd f q q f q f H f G f f G f f q σ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎰⎰ ,其中122d 12f q f γλπ⎡⎤=⎢⎥∆⎣⎦ ()()()1122363622d //~00d d dd F Gq q F G q F H f G f f G f f Gq σ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎰⎰ ,其中122222d 1412F f Gq g λζλμπγ⎡⎤⎛⎫-+⎢⎥⎪+⎢⎥⎝⎭=⎢⎥∆⎢⎥⎢⎥⎣⎦其余见1)中计算式2.程序清单1)f0=1.5;zeta=0.25;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;omega_s=2*pi*fs;lambda=omega./omega0;lambda_s=omega./omega_s;%计算并绘制幅频特性delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;figure(1)loglog(f,z1_q,'b-',0:0.1:100,(0:0.1:100)./(0:0.1:100),'g-');axis([0.1,100,0.1,10]);grid on ;title('z_1~q 的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{z_1}{q}|$$','Interpreter','latex');gtext('0:1');figure(2)loglog(f,z2_z1,'b-',0:0.1:1,(0:0.1:1)./(0:0.1:1),'g-',1:0.1:100,1./...(1:0.1:100),'g-');axis([0.1,100,0.01,10]);grid on;title('z_2~z_1的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{z_2}{z_1}|$$','Interpreter','latex'); gtext('0:1');gtext('-1:1');figure(3)loglog(f,p_z2,'b-');axis([0.1,100,0.01,10]);grid on;title('p~z_2的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{p}{z_2}|$$','Interpreter','latex');%计算并绘制均方根谱sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q; figure(4)loglog(f,sqrt_Gz1,'b-');grid on;title('车轮位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_{z''''1}(f)}$','Interpreter','latex'); figure(5)loglog(f,sqrt_Gz2,'b-');grid on;title('车身位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_{z''''2}(f)}$','Interpreter','latex'); figure(6)loglog(f,sqrt_Ga,'b-');grid on;title('传至人体的位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_a(f)}$','Interpreter','latex');%计算其它值sigma_q=sqrt(trapz(f,sqrt_Gq.^2));%路面不平度加速度均方根值sigma_z1=sqrt(trapz(f,sqrt_Gz1.^2));%车轮加速度均方根值sigma_z2=sqrt(trapz(f,sqrt_Gz2.^2));%车身加速度均方根值sigma_a=sqrt(trapz(f,sqrt_Ga.^2));%传至人体的加速度均方根值for i=1:Nif f(i)<=2W(i)=0.5;elseif f(i)<=4W(i)=f(i)/4;elseif f(i)<=12.5W(i)=1;elseW(i)=12.5/f(i);endendaw=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));%加权加速度均方根值a0=10^(-6);Law=20*log10(aw/a0);%加权振级format shortdisp('路面不平度加速度均方根值=');disp(sigma_q);disp('车轮加速度均方根值=');disp(sigma_z1);disp('车身加速度均方根值=');disp(sigma_z2);disp('传至人体的加速度均方根值=');disp(sigma_a);disp('加权加速度均方根值=');disp(aw);disp('加权振级=');disp(Law);2)%随fs变化f0=1.5;zeta=0.25;gamma=9;mu=10;fs=1.5:0.01:6;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;lambda=omega./omega0;for i=1:length(fs)omega_s=2*pi.*fs(i);lambda_s=omega./omega_s;delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q;for j=1:Nif f(j)<=2W(j)=0.5;elseif f(j)<=4W(j)=f(j)/4;elseif f(j)<=12.5W(j)=1;elseW(j)=12.5/f(j);endendaw(i)=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));enda0=10^(-6);Law=20*log10(aw/a0);figure(1)plot(fs,aw);grid ontitle('a_w随f_s的变化曲线');xlabel('f_s/Hz');ylabel('a_w/m·s^-^2');figure(2)plot(fs,Law);grid ontitle('L_aw随f_s的变化曲线');xlabel('f_s/Hz');ylabel('L_a_w/dB');%随zeta_s变化f0=1.5;zeta=0.25;gamma=9;mu=10;fs=3;zeta_ss=0.125:0.001:0.5;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;omega_s=2*pi.*fs;lambda=omega./omega0;lambda_s=omega./omega_s;for i=1:length(zeta_ss)zeta_s=zeta_ss(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q;for j=1:Nif f(j)<=2W(j)=0.5;elseif f(j)<=4W(j)=f(j)/4;elseif f(j)<=12.5W(j)=1;elseW(j)=12.5/f(j);endendaw(i)=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));enda0=10^(-6);Law=20*log10(aw/a0);figure(1)plot(zeta_ss,aw);grid ontitle('a_w随\zeta_s的变化曲线');xlabel('\zeta_s');ylabel('a_w/m·s^-^2');figure(2)plot(zeta_ss,Law);grid ontitle('L_aw随\zeta_s的变化曲线');xlabel('\zeta_s');ylabel('L_a_w/dB');3)%随f0变化f0=0.25:0.01:3;zeta=0.25;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;lambda_s=omega./omega_s;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(f0)omega0=2*pi*f0(i);lambda=omega./omega0;delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(f0==1.5);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(f0,sm_z2,f0,sm_fd,f0,sm_FdG);axis([0.25,3,-25,10]);grid on;title('各响应量均方根值随f_0变化的曲线');xlabel('f_0/Hz');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');legend('Location','southeast');%随zeta变化f0=1.5;zeta0=0.125:0.001:0.5;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(zeta0)zeta=zeta0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(zeta0==0.25);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(zeta0,sm_z2,zeta0,sm_fd,zeta0,sm_FdG);axis([0.125,0.5,-4,4]);grid on;title('各响应量均方根值随\zeta变化的曲线');xlabel('\zeta');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');%随gamma变化f0=1.5;zeta=0.25;gamma0=4.5:0.1:18;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(gamma0)gamma=gamma0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(gamma0==9);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(gamma0,sm_z2,gamma0,sm_fd,gamma0,sm_FdG);axis([4.5,18,-6,6]);grid on;title('各响应量均方根值随\gamma变化的曲线');xlabel('\gamma');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');legend('Location','southeast');%随mu变化f0=1.5;zeta=0.25;gamma=9;mu0=5:0.1:20;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(mu0)mu=mu0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(mu0==10);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(mu0,sm_z2,mu0,sm_fd,mu0,sm_FdG);axis([5,20,-2,2]);grid on;title('各响应量均方根值随\mu变化的曲线');xlabel('\mu');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB');legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');3.结果分析1)路面不平度加速度均方根值=0.3523车轮加速度均方根值=0.2391车身加速度均方根值=0.0168传至人体的加速度均方根值=0.0161加权加速度均方根值=0.0100加权振级=80.0287分析:根据课本中表6-2,a w=0.0100<0.315,L aw=80.0287<110,故乘客没有不舒适。
matLAB经典例题及答案
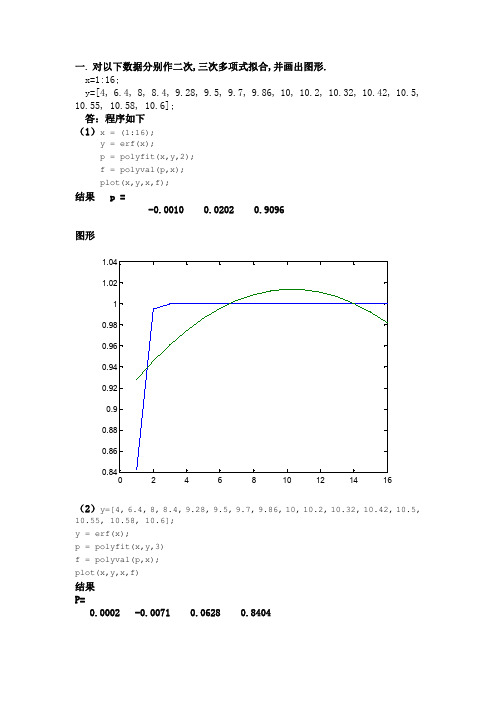
一.对以下数据分别作二次,三次多项式拟合,并画出图形.x=1:16;y=[4,6.4,8,8.4,9.28,9.5,9.7,9.86,10,10.2,10.32,10.42,10.5, 10.55,10.58,10.6];答:程序如下(1)x=(1:16);y=erf(x);p=polyfit(x,y,2);f=polyval(p,x);plot(x,y,x,f);结果p=-0.00100.02020.9096(2)y=[4,6.4,8,8.4,9.28,9.5,9.7,9.86,10,10.2,10.32,10.42,10.5, 10.55,10.58,10.6];y=erf(x);p=polyfit(x,y,3)f=polyval(p,x);plot(x,y,x,f)结果P=0.0002-0.00710.06280.8404二.在[0,4pi]画sin(x),cos(x)(在同一个图象中);其中cos(x)图象用红色小圆圈画.并在函数图上标注“y=sin(x)”,“y=cos(x)”,x轴,y轴,标题为“正弦余弦函数图象”.答:程序如下x=[0:720]*pi/180;plot(x,sin(x),x,cos(x),'ro');x=[2.5;7];y=[0;0];s=['y=sin(x)';'y=cos(x)'];text(x,y,s);xlabel('正弦余弦函数图象'),ylabel('正弦余弦函数图象')图形如下三.选择一个单自由度线性振动系统模型,自定质量、弹簧刚度、阻尼、激振力等一组参数,分别编程(m 文件)计算自由和强迫振动时的响应,并画出振动曲线图。
(要求画出该单自由度线性振动系统模型图)其中质量为m=1000kg,弹性刚度k=48020N/m,阻尼c=1960N.s/m,激振力f(t)=0.阻尼比ζ的程序p=1960/(2*sqrt(48020*1000))求得p=0.1414而p为阻尼比ζ强迫振动时的响应程序g =tf([-101],[48020048020*1.9848020]);bode(g)图形g =tf([001],[0001]);bode(g)振动曲线图程序:函数文件function dx =rigid(t,x)dx =zeros(2,1);dx(1)=x(2);dx(2)=(-48020*x(1)-1960*x(2))/1000;命令文件options =odeset('RelTol',1e-4,'AbsTol',[1e-41e-4]);[T,X]=ode45(@rigid,[012],[11],options);plot(T,X(:,1),'-')其图形如下024681012-6-5-4-3-2-11234单自由度线性强迫振动系统模型图其中质量为m=1000kg,弹性刚度k=48020N/m,阻尼c=1960N.s/m,f(t)=cos(3*pi*t)振动曲线图程序:函数文件function dx=rigid(t,x)dx=zeros(2,1);dx(1)=x(2);dx(2)=(-48020*x(1)-1960*x(2))/1000+cos(3*pi*t);命令文件options=odeset('RelTol',1e-4,'AbsTol',[1e-41e-4]);[T,X]=ode45(@rigid,[020],[11],options);plot(T,X(:,1),'-')力等一组参数,建立Simulink仿真模型框图进行仿真分析。
915230-MATLAB第三版实验答案

for i=2:49 b=i*(i+l)-l; m=fix(sqrt(b)); for j=2:m
if rem(b,j)==0 break
end
end
if j==m
n=n+l;
s=s+b;
end
end
实验6函数文件
%第1题
function y=matl (x)$建立函数文件matl・m
实验7绘图操作
%第1题
% (1)
x=linspace(0,2*pif101);
y=(0.5 + 3*sin (x)・/(1+x.A2))・*cos(x); plot(x,y)
%(2)
x=-5:0・01:5;
y=[];%起始设y为空向疑
for x0=x
if x0<=0$不能写成x0=<0
y=[y,(xO+sqrt(pi))/exp(2)]; else
for i=10:99
j = 10*rem(iz10)+fix (i/10);
if mat3(i)&mat3(j)
disp (i)
end
end
%第4题
function y=fx(x)
y=l・/ ( (x-2)・A2+0・l)+1./((x-3)・A4+0・01);
$在命令窗口调用该函数文件:
y=fx(2)
if t==f+!
z=x+y;
elseif t==,-1
z=x-y;
elseif t==1*'
z=x*y;
elseif t==、['
z=x/y;
汽车理论课后习题MATLAB编程-武汉理工版
汽车理论课后习题MATLAB编程1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
解:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw');zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
Matlab上机作业部分参考答案
3. 设A为 数组,B为一个行数大于3的数组,请给出 (1)删除A的第4、8、12三列的命令; (2)删除B的倒数第3行的命令; (3)求符号极限 (4)求 的3阶导数
lim tan( mx ) 的命令集; x 0 nx x3 y arctan ln(1 e 2 x ) 的命令集; x2
1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8
0
2
4
6
8
10
12
14
某校60名学生的一次考试成绩如下: 93 75 83 93 91 85 84 82 77 76 77 95 94 89 91 88 86 83 96 81 79 97 78 75 67 69 68 84 83 81 75 66 85 70 94 84 83 82 80 78 74 73 76 70 86 76 90 89 71 66 86 73 80 94 79 78 77 63 53 55 1)计算均值、标准差、极差、偏度、峰度,画出直方图; 2)检验分布的正态性; 3)若检验符合正态分布,估计正态分布的参数并检验参数。 解答: x=[93 75 83 93 91 85 84 82 77 76 77 95 94 89 91 88 86 83 96 81 79 97 78 75 67 69 68 84 83 81 75 66 85 70 94 84 83 82 80 78 74 73 76 70 86 76 90 89 71 66 86 73 80 94 79 78 77 63 53 55]; mean(x) std(x) range(x) skewness(x) kurtosis(x) hist(x) h=normplot(x) [muhat,sigmahat,muci,sigmaci]=normfit(x) [H,sig,ci]=ttest(x,80.1)
matlab练习一、二答案
练习一答案1、一个三位整数各位数字的立方和等于该数本身,则称该数为水仙花数。
试编写程序找到,并输出全部水仙花数。
for n=100:999a=floor(n/100);b=floor(rem(n,100)/10);c=rem(n,10);if n==a^3+b^3+c^3s=nendend2、若一个数等于它的各个真因子之和,则称该数为完数,如6=1+2+3,所以6 是完数。
求[1 500]之间的全部完数。
for i=2:500s=1;for j=2:(i-1)if (rem(i,j)==0)s=s+j;endendif s==isendend3、写一个函数pifun 计算下列级数:F(n)=4*(1-1/3+1/5-1/7+...)并使用tic 和toc 指令来测量pifun(1000000)的计算时间。
n=input('请输入n值:');tic;f=0;for i=1:nf=f+4*((-1)^(i+1))/(2*i-1) ;endftoc4、输入一个百分制成绩,要求输出成绩等级为A~E,即90~100 为A,80~89 为B,70~79为C,60~69 为D,60 以下为E。
m=input('请输入一个百分制成绩:');m=floor(m/10);switch mcase {10,9}disp('A');case 8disp('B');case 7disp('C');case 6disp('D');disp('E');otherwisedisp('E');end5、输入x,y 的值,并将它们的值互换后输出。
x = input('x=');y = input('y=');disp ([x,y]);t=x;x=y;y=t;disp ([x,y]);6、某商场对顾客所购买的商品实行打折销售,标准如下(商品价格用price 来表示):price<200 没有折扣;200≤price<500 3%折扣;500≤price<1000 5%折扣;1000≤price<2500 8%折扣;2500≤price<5000 10%折扣;5000≤price 14%折扣输入所售商品的价格,求其实际销售价格。
matlab答案
大于0.5的元素的全下标
行号1 3 2 3 3 2 3 1 2
列号1 1 2 2 3 4 4 5 5
大于0.5的元素的单下标
1 3 5 6 9 11 12 13 14
25.在使用123作为rand随机数发生器的初始化状态的情况下,写出产生长度为1000的“等概率双位(即取-1,+1)取值的随机码”程序指令,并给出-1码的数目。
a
ans =
z
4.求符号矩阵 的行列式值和逆,所得结果应采用“子表达式置换”简洁化。
〖答案〗
A =
[ a11, a12, a13]
[ a21, a22, a23]
[ a31, a32, a33]
DA =
a11*a22*a33-a11*a23*a32-a21*a12*a33+a21*a13*a32+a31*a12*a23-a31*a13*a22
for k=10:-1:1
A=reshape(1:10*k,k,10);
Sa(k,:)=sum(A);
end
Sa
习题
31.根据题给的模拟实际测量数据的一组 和 试用数值差分diff或数值梯度gradient指令计算 ,然后把 和 曲线绘制在同一张图上,观察数值求导的后果。(模拟数据从prob_data401.mat获得)
f =
exp(3*t)*sin(4*t)
g =
exp(3*t)*cos(4*t)
习题
23.要求在闭区间 上产生具有10个等距采样点的一维数组。试用两种不同的指令实现。
24.由指令rand('state',0),A=rand(3,5)生成二维数组A,试求该数组中所有大于0.5的元素的位置,分别求出它们的“全下标”和“单下标”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab课后习题答案-(附图)
2
———————————————————————————————— 作者: ———————————————————————————————— 日期:
3
习题2.1 画出下列常见曲线的图形 (1)立方抛物线3xy 命令:syms x y; ezplot('x.^(1/3)')
(2)高斯曲线y=e^(-X^2); 命令:clear syms x y; ezplot('exp(-x*x)')
(3)笛卡尔曲线
4
命令:>> clear >> syms x y; >> a=1; >> ezplot(x^3+y^3-3*a*x*y)
(4)蔓叶线 命令:>> clear >> syms x y; >> a=1 ezplot(y^2-(x^3)/(a-x))
(5)摆线:tbyttaxcos1,sin 命令:>> clear >> t=0:0.1:2*pi; >> x=t-sin(t);
5
>>y=2*(1-cos(t)); >> plot(x,y)
7螺旋线 命令:>> clear >> t=0:0.1:2*pi; >> x=cos(t); >> y=sin(t); >> z=t; >>plot3(x,y,z)
(8)阿基米德螺线
6
命令:clear >> theta=0:0.1:2*pi; >> rho1=(theta); >> subplot(1,2,1),polar(theta,rho1)
(9) 对数螺线 命令:clear theta=0:0.1:2*pi; rho1=exp(theta); subplot(1,2,1),polar(theta,rho1)
(12)心形线
7
命令:>> clear >> theta=0:0.1:2*pi; >> rho1=1+cos(theta); >> subplot(1,2,1),polar(theta,rho1)
练习2.2 1. 求出下列极限值 (1)nnnn3lim3 命令:>>syms n
>>limit((n^3+3^n)^(1/n)) ans = 3
(2))121(limnnnn
命令:>>syms n >>limit((n+2)^(1/2)-2*(n+1)^(1/2)+n^(1/2),n,inf) ans = 0 (3)xxx2cotlim0
命令:syms x;
8
>> limit(x*cot(2*x),x,0) ans = 1/2
(4))(coslimcmxx 命令:syms x m; limit((cos(m/x))^x,x,inf) ans = 1
(5))111(lim1exxx
命令:syms x >> limit(1/x-1/(exp(x)-1),x,1) ans = (exp(1)-2)/(exp(1)-1)
(6))(2limxxxx 命令:syms x >> limit((x^2+x)^(1/2)-x,x,inf) ans = 1/2 练习2.4 1. 求下列不定积分,并用diff验证:
(1)xdxcos1 >>Clear >> syms x y >> y=1/(1+cos(x)); >> f=int(y,x) f = tan(1/2*x) >> y=tan(1/2*x); >> yx=diff(y,x); >> y1=simple(yx) y1 = 1/2+1/2*tan(1/2*x)^2
(2)exdx1 clear syms x y
9
y=1/(1+exp(x)); f=int(y,x) f = -log(1+exp(x))+log(exp(x)) syms x y y=-log(1+exp(x))+log(exp(x)); yx=diff(y,x); y1=simple(yx) y1 = 1/(1+exp(x))
(3)dxxxsin2 syms x y y=x*sin(x)^2; >> f=int(y,x) f = x*(-1/2*cos(x)*sin(x)+1/2*x)-1/4*cos(x)^2-1/4*x^2 clear syms x y y=x*(-1/2*cos(x)*sin(x)+1/2*x)-1/4*cos(x)^2-1/4*x^2; yx=diff(y,x); >> y1=simple(yx) y1 = x*sin(x)^2
(4) xdxsec3 syms x y y=sec(x)^3; f=int(y,x) f = 1/2/cos(x)^2*sin(x)+1/2*log(sec(x)+tan(x)) clear syms x y y=1/2/cos(x)^2*sin(x)+1/2*log(sec(x)+tan(x)); yx=diff(y,x); y1=simple(yx) y1 = 1/cos(x)^3 2. 求下列积分的数值解
1)dxxx10 clear syms x y=int(x^(-x),x,0,1) y =
10
int(x^(-x),x = 0 .. 1) vpa(y,10) ans = 1.291285997
2)xdxexcos3202 clear syms x y=int(exp(2*x)*cos(x)^3,x, clear syms x y=int((1/(2*pi)^(1/2))*exp(-x^2/2),x,0,1) y = 7186705221432913/36028797018963968*erf(1/2*2^(1/2))*2^(1/2)*pi^(1/0,2*pi) y = 22/65*exp(pi)^4-22/65vpa(ans,10)
(3) dxxe210221
>> clear >> syms x >> y=int(1/(2*pi)^(1/2)*exp(-x^2/2),0,1); >> vpa(y,14) ans = .34134474606855
2(4) >> clear >> syms x >> y=int(x*log(x^4)*asin(1/x^2),1,3); Warning: Explicit integral could not be found. > In sym.int at 58 >> vpa(y,14) ans = 2.4597721282375
2(5) >> clear >> syms x >> y=int(1/(2*pi)^(1/2)*exp(-x^2/2),-inf,inf); >> vpa(y,14) ans = .99999999999999
11
练习2.5 1判断下列级数的收敛性,若收敛,求出其收敛值。 1)syms n s1=symsum(1/n^(2^n),n,1,inf) s1 = sum(1/(n^(2^n)),n = 1 .. Inf) vpa(s1,10) ans = 1.062652416 因此不收敛 2)syms n s1=symsum(sin(1/n),n,1,inf) s1 = sum(sin(1/n),n = 1 .. Inf) vpa(s1,10) ans = sum(sin(1/n),n = 1 .. Inf) 不收敛 (3) >> clear >> syms n >> s=symsum(log(n)/n^3,n,1,inf) s = -zeta(1,3) 收敛 (4) syms n s1=symsum(1/(log10(n))^n,n,3,inf) s1 = sum(1/((log(n)/log(10))^n),n = 3 .. inf) 不收敛 (5) syms n s1=symsum(1/n*log10(n),n,2,inf) s1 = sum(1/n*log(n)/log(10),n = 2 .. Inf) 不收敛 (6) >> clear >> syms n >> s=symsum((-1)^n*n/n^2+1,n,1,inf)