控制系统CAD实验指导书(2009)_3
电子线路CAD实验指导书(第4版)
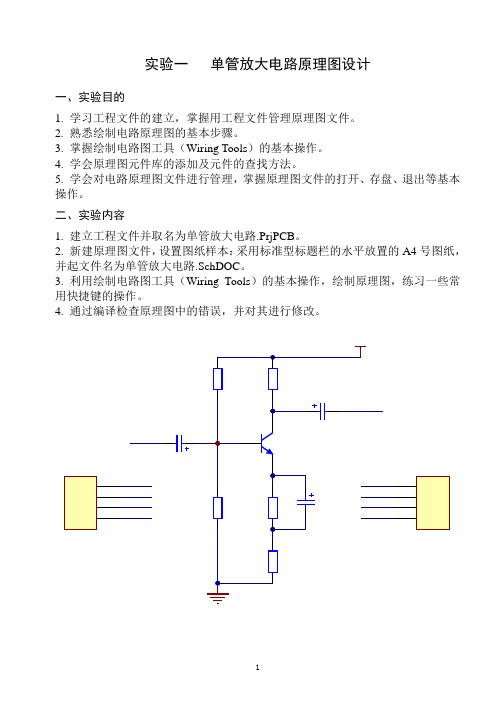
实验一单管放大电路原理图设计一、实验目的1. 学习工程文件的建立,掌握用工程文件管理原理图文件。
2. 熟悉绘制电路原理图的基本步骤。
3. 掌握绘制电路图工具(Wiring Tools)的基本操作。
4. 学会原理图元件库的添加及元件的查找方法。
5. 学会对电路原理图文件进行管理,掌握原理图文件的打开、存盘、退出等基本操作。
二、实验内容1. 建立工程文件并取名为单管放大电路.PrjPCB。
2. 新建原理图文件,设置图纸样本:采用标准型标题栏的水平放置的A4号图纸,并起文件名为单管放大电路.SchDOC。
3. 利用绘制电路图工具(Wiring Tools)的基本操作,绘制原理图,练习一些常用快捷键的操作。
4. 通过编译检查原理图中的错误,并对其进行修改。
实验二皮尔斯电路原理图设计一、实验目的1. 学习工程文件的建立,掌握用工程文件管理原理图文件。
2. 熟悉绘制电路原理图的基本步骤。
3. 掌握绘制电路图工具(Wiring Tools)的基本操作。
4. 学会原理图元件库的添加及元件的查找方法。
5. 学会对电路原理图文件进行管理,掌握原理图文件的打开、存盘、退出等基本操作。
二、实验内容1. 建立工程文件并取名为皮尔斯电路.PrjPCB。
2. 新建原理图文件,设置图纸样本:采用标准型标题栏的水平放置的A4号图纸,并起文件名为皮尔斯电路.SchDOC。
3. 利用绘制电路图工具(Wiring Tools)的基本操作,绘制原理图。
4. 通过编译检查原理图中的错误,并对其进行修改。
实验三电脑时控开关控制板原理图设计一、实验目的1. 学习工程文件的建立,掌握用工程文件管理原理图文件。
2. 熟悉绘制电路原理图的基本步骤。
3. 掌握绘制电路图工具(Wiring Tools)的基本操作。
4. 学会原理图元件库的添加及元件的查找方法。
5. 学会对电路原理图文件进行管理,掌握原理图文件的打开、存盘、退出等基本操作。
二、实验内容1. 建立工程文件并取名为电脑时控开关控制板.PrjPCB。
计算机控制系统 实验指导书

西安唐都科教仪器公司
Copyright Reserved 2005
版权声明
本用户手册的版权归西安唐都科教仪器开发有限责任公司所有,保留一切权 利。未经本公司书面许可,任何单位和个人不得擅自摘抄、复制本用户手册的部 分或全部,并以任何形式传播。
西安唐都科教仪器开发有限责任公司,1995~2005 ©,All rights reserved.
第 1 章 I386EX系统板概述 ........................................................................................................2
1.1 1.2 系统简介 ...................................................................................................................................................2 i386EX系统板的特点 ...............................................................................................................................4
4.1 4.2 4.2.1 4.2.2 4.2.3 4.2.4 4.2.5 4.2.6 4.2.7 4.2.8 联机软件系统概述 .................................................................................................................................18 软件使用说明 .........................................................................................................................................18 主界面窗口 ..........................................................................................................................................18 菜单功能 ..............................................................................................................................................20 工具栏功能 ..........................................................................................................................................29 虚拟仪器界面 ......................................................................................................................................35 自定义功能 ..........................................................................................................................................46 右键菜单功能 ......................................................................................................................................49 Debug调试命令 ....................................................................................................................................50 软件疑难解答 ......................................................................................................................................52
cad实验报告三
昆明理工大学信息工程与自动化学院学生实验报告( —— 学年 第 学期 )课程名称: 开课实验室: 年 月 日实验三 控制系统校正及PID 控制器设计一、 实验目的控制系统校正(频率法);PID 控制器设计。
二、 实验内容1. 设一单位负反馈控制系统,如果控制对象的传递函数为:试设计一个串联超前校正装置。
要求:相角裕度≥45。
;当系统的输入信号是单位斜坡信号时,稳态误差e ss ≤0.04;取C=1μF 时,确定该串联超前校正装置的元件数据;绘制出校正后系统和未校正系统的bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
校正前:>> num=8000;den=conv([1,0],conv([1,4],[1,80])); G=tf(num,den);margin(G)校正后:>> num=8000;den=conv([1,0],conv([1,4],[1,80])); G=tf(num,den);,margin(G)gamma_cas=57;delta=14gamma_1=gamma_cas+delta;w=0.01:0.01:1000;[mag,phase]=bode(G,w);n=find(180+phase-(gamma_1)<=0.1);wgamma_1=n(1)/100;[mag,phase]=bode(G,wgamma_1);rr=-20*log10(mag);beta=10^(rr/20);w2=wgamma_1/10;w1=beta*w2;numc=[1/w2,1];denc=[1/w1,1];Gc=tf(numc,denc)GcG=Gc*Gbode(G,GcG),figure(2),margin(GcG),betasys=feedback(Gc*G,1)figure(3),step(sys)delta =14Transfer function:7.692 s + 1-----------140.7 s + 1Transfer function:6.154e004 s + 8000------------------------------------------------140.7 s^4 + 1.182e004 s^3 + 4.51e004 s^2 + 320 sbeta =0.0547Transfer function:6.154e004 s + 8000------------------------------------------------------------- 140.7 s^4 + 1.182e004 s^3 + 4.51e004 s^2 + 6.186e004 s + 82. 设一单位负反馈控制系统,其控制对象的传递函数为:试设计一个串联滞后校正装置。
计算机控制技术实验指导书科大.
《计算机控制技术》实验指导书自动化与电子工程学院2009.3目录实验设备简介 (2)实验一A/D与D/A转换 (5)实验二数字滤波 (6)实验三数字PID算法的研究 (7)实验四直流电机转速控制 (9)实验设备简介一、系统功能特点1.以PC微机为操作台,高效率支持“计算机控制”的教学实验。
2.系统含有高阶模拟单元,可根据教学实验需要进行灵活组合,构成各种典型环节与系统。
3.系统含有界面友好、功能丰富的软件。
PC微机在实验中,除了用作实验测试所需的虚拟仪器外,还可用作测试信号发生器以及具有很强柔性的数字控制器。
4.系统的硬件、软件设计,充分考虑了开放型、研究型实验的需要。
可自己设计实验内容,构建系统对象,编写控制算法,进行计算机控制技术的研究。
二、系统构成实验系统由上位PC微机(含实验系统上位机软件)、ACCT-I实验箱、USB2.0通讯线等组成。
ACCT-I实验箱内装有以C8051F060芯片(含数据处理系统软件)为核心构成的数据处理卡,通过USB口与PC微机连接。
ACCT-I实验箱是一个通用的实验箱。
它主要由电源部分U1单元,元器件部分U2单元,输入输出接口单元U3,反相器、非线性单元U4、U5、U6、U7,模拟电路单元U8~U16组成。
U1单元可提供+5V,-5V,+15V,-15V,0V,1.2V~15V可调电压的输出。
U2单元提供了实验所需的电容与电阻,电位器,另提供插接电路,供放置自己选定大小的元器件。
U3单元为数据处理模块,用于完成数据采集与数据输出,并通过并行口与上位PC机进行通讯。
U4为反相器;U5,U6,U7分别为典型的非线性环节电路。
U8~U16为由运算放大器与电阻,电容等器件组成的模拟电路单元,由场效应管组成的电路用于锁零。
在“计算机控制”实验中,这些单元常被用于模拟被控对象。
系统上位机界面采用LabVIEW 编程语言编写,操作简单,界面友好。
三、实验注意事项1.实验开始前需要对实验箱上的运算放大器电路进行调零。
过程控制系统实验指导书02
《过程控制系统》实验指导书目录第一章实验装置说明 (1)第二章实验要求及安全操作规程 (4)实验一单容自衡水箱液位特性测试 (5)实验二双容水箱特性的测试 (9)实验三单容水箱液位定值控制系统 (12)实验四单闭环流量定值控制系统 (15)实验五锅炉内胆水温定值控制系统 (17)实验六锅炉内胆水温位式控制系统 (19)第一章实验装置说明实验对象总貌图如图1-1所示:图1-1 实验对象总貌图本实验装置对象主要由水箱、锅炉和盘管三大部分组成。
供水系统有两路:一路由三相(380V恒压供水)磁力驱动泵、电动调节阀、直流电磁阀、涡轮流量计及手动调节阀组成;另一路由变频器、三相磁力驱动泵(220V变频调速)、涡轮流量计及手动调节阀组成。
一、被控对象由不锈钢储水箱、(上、中、下)三个串接有机玻璃水箱、4.5KW三相电加热模拟锅炉(由不锈钢锅炉内胆加温筒和封闭式锅炉夹套构成)、盘管和敷塑不锈钢管道等组成。
1.水箱:包括上水箱、中水箱、下水箱和储水箱。
上、中、下水箱采用淡蓝色优质有机玻璃,不但坚实耐用,而且透明度高,便于学生直接观察液位的变化和记录结果。
上、中水箱尺寸均为:D=25cm,H=20cm;下水箱尺寸为:D=35cm,H=20cm。
水箱结构独特,由三个槽组成,分别为缓冲槽、工作槽和出水槽,进水时水管的水先流入缓冲槽,出水时工作槽的水经过带燕尾槽的隔板流入出水槽,这样经过缓冲和线性化的处理,工作槽的液位较为稳定,便于观察。
水箱底部均接有扩散硅压力传感器与变送器,可对水箱的压力和液位进行检测和变送。
上、中、下水箱可以组合成一阶、二阶、三阶单回路液位控制系统和双闭环、三闭环液位串级控制系统。
储水箱由不锈钢板制成,尺寸为:长×宽×高=68cm×52㎝×43㎝,完全能满足上、中、下水箱的实验供水需要。
储水箱内部有两个椭圆形塑料过滤网罩,以防杂物进入水泵和管道。
2.模拟锅炉:是利用电加热管加热的常压锅炉,包括加热层(锅炉内胆)和冷却层(锅炉夹套),均由不锈钢精制而成,可利用它进行温度实验。
东华大学计算机控制系统实验指导书

实验要求:1 按实验指导书的连线示意图完成接线。
检查无误后再开启电源。
2 如果开启实验箱电源后,出现发现新硬件的提示,可参考教学视频,安装虚拟示波器的驱动程序。
3 复制范例程序到E:盘自己的文件夹中,启动Keil 程序,参照教学视频,打开范例程序文件,编译并运行,然后利用示波器虚拟仪器软件,查看并记录实验波形。
4 完成一次波形测定后,按单片机系统板上的“复位”键,停止程序运行,然后参考教学视频,在Keil软件中,修改程序的相关参数(采样周期),重新编译运行,并观察和记录波形变化。
5 实验要求分别利用零阶保持器、线性插值、二次曲线插值三种方法对采样数据进行还原,(范例程序ACC1-2-1、ACC1-2-2、ACC1-2-3)每种方法的实验中分别以采样周期(10ms、50ms、200ms)对信号频率为1Hz、5Hz的正弦波信号采样。
观察和比较不同的采样还原效果。
6 根据采样定理的知识,根据实验数据和波形,对采样信号的还原效果进行分析和说明实验波形及分析说明:0阶采样法10MS采样周期(1hz):0阶采样法50MS采样周期(1hz):0阶采样法200MS采样周期(1hz):直线插值法10MS采样周期(1hz):直线插值法50MS采样周期(1hz):直线插值法200MS采样周期(1hz):二次曲线差值10MS采样周期(1hz):二次曲线差值50MS采样周期(1hz):二次曲线差值200MS采样周期(1hz):分析:从波形图可以看出,对于零阶保持,在TK为10ms和50ms时信号还原效果较好,当为200ms时信号还原效果较差。
当正弦波频率为1hz信号还原效果又比5hz的要好对于直线插值和二次曲线插值,10ms采样周期5hz的信号还原效果较好,且当采样周期大于200ms 时信号失真。
验证了采样定理的正确性,当Ws比2Wmax大,信号能更好的恢复,同时,采用插值法恢复信号,就可以降低对采样频率的要求。
实验要求:参考实验指导书进行系统连线。
电子设计cad实验指导书
实验一、Protel DXP的初步认识实验1.实验目的[1]了解ProtelDXP的基本构成。
[2]掌握Protel DXP的一些基本操作技能。
2.实验内容:练习ProtelDXP软件的启动,关闭,工作区面板的设置,新建,保存,打开等菜单命令。
3.实验步骤:[1]用3种方法启动Protel DXP。
[2]用4种方法关闭Protel DXP。
[3]隐藏状态栏和命令栏。
[4]打开状态栏和命令栏。
[5]将工作区面板变成自动隐藏方式。
[6]将工作区面板变成移动显示方式。
[7]将工作区面板变成锁定显示方式。
[8]关闭工作区中的PCB面板。
[9]在工作区中添加PCB面板。
[10]关闭工作区中所有的面板(共7个)。
[11]启动工作区面板的默认设置。
[12]在D:\下建立一个名为MYPCB的文件夹。
使用工作区的Pick a task区域创建一个PCB项目文件,命名为MyProject1.PrjPCB,并保存在D:\MYPCB\下。
[13]使用Project菜单命令创建一个PCB项目文件,该项目命名为MyProject2.PrjPCB,并保存在D:\MYPCB文件夹下,同时关闭项目MyProject1.PrjPCB。
[14]用菜单新建一个原理图文件“Mysheet.SCHDOC”并添加到项目MyProject2.PrjPCB中,同时保存起来。
[15]关闭MyProject2.PrjPCB,打开MyProject1.PrjPCB,同时创建一个原理图元件库文件“Mylib.Schlib”添加到当前项目中,并保存起来。
[16]关闭所有项目,打开系统自带的项目“Simple RC Circuit.PRJPCB”,该项目存放路径为系统盘(如:C:\)下的Program Fil es\Altium2004\Examples\Circuit Simulation\Simple RC Cir cuit。
[17]打开项目中的原理图文件Simple RC Circuit.SCHDOC。
机电控制实验指导书2009
按下通电按扭 SB1,电流继电器 KA 得电并且自锁,同时常开触头 KA 使延时继电器线圈 KT 得电,延时继电器计时开始,同时交流接触器 KM1 得电并自锁,灯 EL1 亮。10S 后 KT 触头闭合,交流接触器线圈 KM2 得电 并且自锁,灯 EL2 亮,电路处于长久灯亮的状态。只有按下断电按扭 SB2, 交流接触器线圈 KM1 和 KM2 才能失电,灯 EL1 和灯 EL2 才能灭。常闭触 头 KM2 的作用是逻辑拆除电流继电器回路和延时继电器回路,以便降低 功率损耗,延长继电器使用寿命。 2.接线方法 步骤:⑴断开刀开关,断开组合开关,指示灯灭;
7、实验完毕后,要清理好元器件;注意好元件的保养和实验台的整 洁。
四、实验原理、接线方法及实验过程
⒈单作用气缸的换向回路(图 4-1)
单作用气缸的换向回路
5 4
3
2
1 1气源 2三联件 3二位三通单电 磁阀 4单向节流阀 5单作用气缸
图 4-1 单作用气缸换向回路
8
⑴将二位三通单电磁换向阀的电源输入口插入相应的电器控制面板输出 口。确认连接安装正确稳妥,把三联件的调压旋钮旋松,通电,开启气 泵。待泵工作正常,再次调节三联件的调压旋钮,使回路中的压力在系 统工作压力以内。
⑵当二位三通电磁换向阀通电时,右位接入,气缸左腔进气,气缸伸出, 失电时气缸靠弹簧的弹力回位(在缸的伸缩过程中通过调节回路中的单 向节流阀控制气缸动作的快慢)。
⑶实验完毕后,关闭泵,切断电源,待回路压力为零时,拆卸回路,清理 元器件并放回规定的位置。
⒉双作用气缸的速度调节回路(实验原理、方法和手段附后) 进口调速回路 ⑴实验原理图(图 4-2): ⑵实验步骤:
过程控制系统实验指导书.doc
过程控制系统实验指导书信息与控制学院实验一PID 参数整定与单回路过程控制系统仿真一、 实验目的(1) 熟悉Simulink 的常用界面以及常用的功能模块; (2) 掌握C-C 工程整定参数的方法; (3) 掌握Z-N 工程整定参数的方法。
二、 实验内容已知被控广义对象的传递函数为:采用工程整定参数的方法,利用PID 控制器,完成P 、PI 、PID 控制时的参数整定、系统仿真图、单位阶跃响应。
三、 实验原理由题目可知系统的增益K 、时间常数T 和纯迟延时间τ分别为:K =8、τ=180s 、T =360s 。
1、C-C 工程整定参数方法根据C-C 工程整定方法的计算公式,可得 ① P 控制时:Kc=(T/τ+0.333)/K=0.2916利用图1.1所示的Simulink 系统方框图,将仿真时间设置为2000,启动仿真,便可在示波器中看到如图1.1所示的系统在P 控制时的单位阶跃响应曲线。
sp e s s G 180)1360(8)(-+=图1.1 系统仿真图及阶跃响应曲线(P控制)② PI控制时:K c=(0.9*T/τ+0.082)/K=0.2353;T i =(3.33*τ/T+0.3*(τ/T)^2)/(1+2.2*τ/T)*T=298.2857利用图1.2所示的Simulink系统方框图,将仿真时间设置为2000,启动仿真,便可在示波器中看到如图1.2所示的系统在PI控制时的单位阶跃响应曲线。
图1.2 系统仿真图及阶跃响应曲线(PI控制)③ PID控制时:Kc=(1.35*T/τ+0.27)/K=0.3713;Ti =(2.5*τ/T+0.5*(τ/T)^2)/(1+0.6*τ/T)*T= 380.7692Td=(0.37*τ/T)/(1+0.2*τ/T)*T=60.5455图1.3 系统仿真图及阶跃响应曲线(PID控制)由图1.3可知,根据C-C工程整定方法得到的控制器参数,系统在PID控制时阶跃响应的超调量大约为60%,上升时间大约为300s;过渡过程时间大约为2000s。
CAD基础上机指导书
2.2命令和常用功能键的用法
(1)命令的激活(命令行,工具栏,下拉菜单,屏幕菜ห้องสมุดไป่ตู้);
(2)命令选项操作;
(3)命令的中断(Esc键)、命令结束(Enter键);
(4)取消操作(Undo)、恢复取消的操作(Redo);
(5)命令的输入方法:1)从工具条输入,2)从下拉菜单输入,3)从键盘输入。
(1)其他低版本的AutoCAD图形文件(*.dwg)。如AutoCAD2000图形文件(*.dwg)。
(2)AutoCAD图形文件模板(*.dwt)
(3)其他低版本的AutoCAD图形文件模板(*.dwt),如图1-9所示。图1-9用其它文件类型保存文件对话框
注意:同学们以后作图时,要及时地保存所作的图形,以免突然断电等意外发生。
3.3自动追踪(Autotrack)模式
自动追踪模式有两种:极轴追踪和对象捕捉追踪。
(1)极轴追踪的设置与应用
Tools(工具)→Drafting Settings(草图设置),单击,
打开图1-4草图设置对话框,单击“极轴追踪”按钮,打开图1-5设置极轴追踪对话框,在对话框中设置新的追踪角,如30°、45°、60°、75°等。
执行“绘图(Draw)”→“矩形(RECtangle)”命令,在命令行显示输入A3图内框左下角坐标“25,5”,回车,输入A3图内框右上角坐标“415,292”,回车。画出A3图内框。
在命令行输入“Zoom(或Z)”,回车,再输入“ALL(或A)”,A3图框全屏显示。如图2-4所示。保存图2-4所示的A3图框。图2-4 A3图框设置
执行“格式(Format)”→“图形界限(Limits)”命令,在命令行显示图形界限左下角坐标“0,0”,回车,显示右上角坐标“420,297”,回车。图2-3图形单位设置
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三 控制系统设计
一、 实验目的
掌握使用Bode图法进行控制系统设计的方法;
熟悉Ziegler-Nichols的第二种整定方法的步骤。
二、 实验内容
1. 设一单位负反馈控制系统,如果控制对象的开环传递函数为:
)122.0)(15)(120()(+++=sss
K
sG
p
试设计一个串联超前校正装置。
要求:校正后系统的位置误差系数为50,相角裕度为。取C=1μF
时,确定该串联校正装置的元件数据;绘制出校正后系统和未校正系统的Bode
图及其闭环系统的单位阶跃响应曲线,并进行对比。
oo
345±
2. 设一单位负反馈控制系统,其开环传递函数为:
)12.0)(11.0()(++=sss
K
sG
p
试设计一个串联滞后校正装置。
要求:校正后系统的相角裕度°≥40'γ;幅值裕度大于等于10dB,静态速度
误差系数,截止频率不小于2.3rad/s。要求绘制校正后系统和未校正系
统的Bode图及其闭环系统的单位阶跃响应曲线,并进行对比。
130−
=sK
v
3. 设一单位负反馈系统的开环传递函数为:
)5)(1(1)(++=sss
sG
p
请采用Ziegler-Nichols第二整定法设计一个PID控制器,确定PID控制器的Kp,Ti,
Td的值,并求设计出的系统的单位阶跃响应曲线,给出系统的性能指标。
三、实验要求
1. 预习
利用所学知识,编写实验内容中1到3的相应程序,并写在预习报告上。
2. 上机实验
上机调试完成实验内容1到3,记录实验结果,并与预习报告相比较。
3. 撰写实验报告