AWS D1.1 焊缝超声波探伤-精华 (快速学成-最新版)
超声波探伤培训教程
培训教材之理论基础第一章无损检测概述无损检测包括射线检测(RT)、超声检测(UT)、磁粉检测(MT)、渗透检测(PT)和涡流检测(ET)等五种检测方法。
主要应用于金属材料制造的机械、器件等的原材料、零部件和焊缝,也可用于玻璃等其它制品。
射线检测适用于碳素钢、低合金钢、铝及铝合金、钛及钛合金材料制机械、器件等的焊缝及钢管对接环缝。
射线对人体不利,应尽量避免射线的直接照射和散射线的影响。
超声检测系指用A型脉冲反射超声波探伤仪检测缺陷,适用于金属制品原材料、零部件和焊缝的超声检测以及超声测厚。
磁粉检测适用于铁磁性材料制品及其零部件表面、近表面缺陷的检测,包括干磁粉、湿磁粉、荧光和非荧光磁粉检测方法。
渗透检测适用于金属制品及其零部件表面开口缺陷的检测,包括荧光和着色渗透检测。
涡流检测适用于管材检测,如圆形无缝钢管及焊接钢管、铝及铝合金拉薄壁管等。
磁粉、渗透和涡流统称为表面检测。
第二章超声波探伤的物理基础第一节基本知识超声波是一种机械波,机械振动与波动是超声波探伤的物理基础。
物体沿着直线或曲线在某一平衡位置附近作往复周期性的运动,称为机械振动。
振动的传播过程,称为波动。
波动分为机械波和电磁波两大类。
机械波是机械振动在弹性介质中的传播过程。
超声波就是一种机械波。
机械波主要参数有波长、频率和波速。
波长?:同一波线上相邻两振动相位相同的质点间的距离称为波长,波源或介质中任意一质点完成一次全振动,波正好前进一个波长的距离,常用单位为米(m);频率f:波动过程中,任一给定点在1秒钟内所通过的完整波的个数称为频率,常用单位为赫兹(Hz);波速C:波动中,波在单位时间内所传播的距离称为波速,常用单位为米/秒(m/s)。
由上述定义可得:C=? f ,即波长与波速成正比,与频率成反比;当频率一定时,波速愈大,波长就愈长;当波速一定时,频率愈低,波长就愈长。
次声波、声波和超声波都是在弹性介质中传播的机械波,在同一介质中的传播速度相同。
供参考---AWS D1.1T、K、Y焊接结构超声波探伤验收标准(点状缺陷用R级,非点状缺陷用X级 )
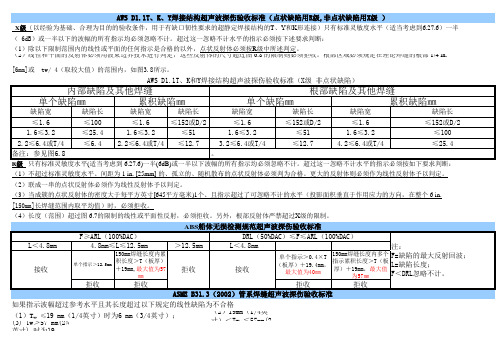
(2)19mm(1/4英寸)<Tw ≤57mm(2¼英寸)时为Tw /3;(3) Tw>57 mm(2¼英寸) 时为19 mm(3/4英寸)。
注:Tw 是被检焊缝的厚度,如果焊接的两部分由不同的厚度组成,TW 指的是两个厚板中较小值。
(2)线性和平面的反射体必须用波束边界技术进行判定,这些反射体的尺寸超过图 6.8 的限制则必须拒收。
根部区域必须规定在理论焊缝的根部 1/4 in.[6mm]或 tw/ 4(取较大值)的范围内,如图3.8所示。
AWS D1.1T、K、Y焊接结构超声波探伤验收标准(点状缺陷用R级,非点状缺陷用X级 )X 级(以经验为基础、合理为目的的验收条件,用于有缺口韧性要求的超静定焊接结构的T 、Y 和K 形连接)只有标准灵敏度水平(适当考虑到6.27.6)一半( 6dB)或一半以下的波幅的所有指示均必须忽略不计。
超过这一忽略不计水平的指示必须按下述要求判断:(1)除以下限制范围内的线性或平面的任何指示是合格的以外,点状反射体必须按R 级中所述判定。
R 级 (4)长度(范围)超过图 6.7的限制的线性或平面性反射,必须拒收。
另外,根部反射体严禁超过X 级的限制。
(1)不超过标准灵敏度水平、间距为 1 in. [25mm] 的、孤立的、随机散布的点状反射体必须判为合格。
更大的反射体则必须作为线性反射体予以判定。
(2)联成一串的点状反射体必须作为线性反射体予以判定。
(3)当成簇的点状反射体的密度大于每平方英寸[645平方毫米)1个、且指示超过了可忽略不计的水平(投影面积垂直于作用应力的方向,在整个 6 in.[150mm]长焊缝范围内取平均值)时,必须拒收。
(1)T w ≤19 mm(1/4英寸)时为6 mm(3/4英寸);如果指示波幅超过参考水平且其长度超过以下规定的线性缺陷为不合格。
AWSD1

1. 非管材连接的焊接接头
1.1 评定
• 6.13.1 静荷载非管材连接的合格判据 除目检外还须进行UT的焊缝,其合格判据必须符合表6.2的要求。对于连接腹板
和翼缘板的CJP焊缝,不连续的合格与否,如采用除扫查方式“E”( 见6.30.2.2) 以外的扫查动作探测到的话,可根据实际腹板厚度加上 1 in. [25mm]得出的焊缝厚 度予以评判。而用扫查方式“E”探测到的不连续,则必须根据实际腹板厚度,用表 6.2的验收判据予以评判。当连接腹板与翼缘板的CJP焊缝承受垂直于焊缝的计算 拉应力时,此焊缝应在设计图上标明,并必须符合表6.2的要求。
D级(细小不连续) 任何这类指示,不论其在焊缝中的长度或部位,必须判定合格。
1.2 工艺
6.26.6.2 对接接头检测 所有对接焊缝必须从焊缝轴线的每一侧进行检测。角接接头和 T 型
接头焊缝基本上仅从焊缝轴线的一侧检测。所有焊缝的检测必须使用适 用的扫查方式,或在必要时使用图 6.15 所示的方式,以检测纵向和横 向不连续。这样做的意图是,只要可行,最低限度要使检测焊缝的声波 在两相交叉方向上通过所有受检测焊缝与HAZ(热影响区)的整个体积 。 6.26.6.1 扫查
孔上方(A位置),将孔回波调至基准高度(50%或80%),然 后将探头离开试块,再提高20dB,荧屏上大于12mm声程以 外,不应有超过基准高度的任何回波。
前沿 探头前沿应小于等于25mm。
分辨率 仪器控制处于正常试验状态下,将探头
分别置于RC分辨力对比试块上,使孔的反射 回波调到萤光屏中等高度。分辨能力必须至 少能区分来自三个孔的指示峰值。
-2
~
+2
超声波AWS D1.1检测工艺
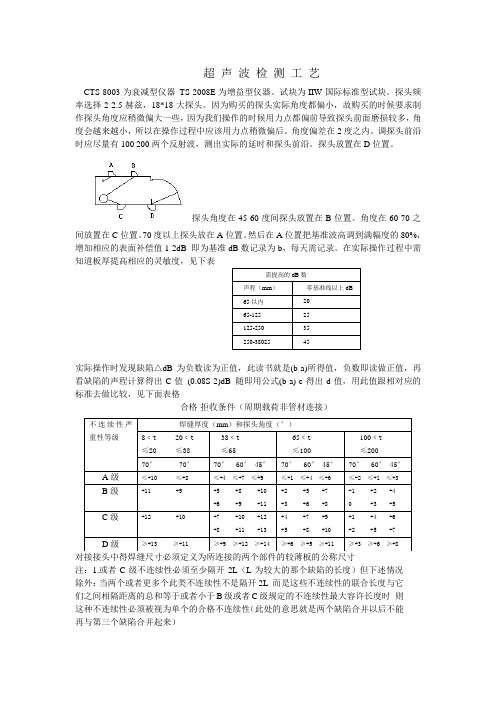
超声波检测工艺CTS-8003为衰减型仪器TS-2008E为增益型仪器。
试块为IIW国际标准型试块。
探头频率选择2-2.5赫兹,18*18大探头。
因为购买的探头实际角度都偏小,故购买的时候要求制作探头角度应稍微偏大一些,因为我们操作的时候用力点都偏前导致探头前面磨损较多,角度会越来越小,所以在操作过程中应该用力点稍微偏后。
角度偏差在2度之内。
调探头前沿时应尽量有100 200两个反射波,测出实际的延时和探头前沿。
探头放置在D位置。
探头角度在45-60度间探头放置在B位置。
角度在60-70之间放置在C位置。
70度以上探头放在A位置。
然后在A位置把基准波高调到满幅度的80%,增加相应的表面补偿值1-2dB 即为基准dB数记录为b,每天需记录。
在实际操作过程中需知道板厚提高相应的灵敏度,见下表实际操作时发现缺陷△dB为负数读为正值,此读书就是(b-a)所得值,负数即读做正值,再看缺陷的声程计算得出C值(0.08S-2)dB 随即用公式(b-a)-c得出d值,用此值跟相对应的标准去做比较,见下面表格合格-拒收条件(周期载荷非管材连接)注:1.或者C级不连续性必须至少隔开2L(L为较大的那个缺陷的长度)但下述情况除外:当两个或者更多个此类不连续性不是隔开2L 而是这些不连续性的联合长度与它们之间相隔距离的总和等于或者小于B级或者C级规定的不连续性最大容许长度时则这种不连续性必须被视为单个的合格不连续性(此处的意思就是两个缺陷合并以后不能再与第三个缺陷合并起来)A 级(大不连续性)任何这类指示必须拒收(不论长度)B级(中不连续性)任何长度大于20mm的这类指示必须拒收C级(小不连续性)在焊缝厚度中一半以内的位置任何长度大于50mm的这类指示或在焊缝厚度的上下四分之一位置范围内大于20mm的这类指示必须拒收D级(细小不连续性)任何这类指示不管长度或者焊缝中得位置必须判定为合格。
超声波探伤焊接实训报告
一、实训目的1. 了解超声波探伤的基本原理、设备、操作方法及检测标准;2. 掌握超声波探伤在焊接质量检测中的应用;3. 提高焊接质量,确保产品安全可靠。
二、实训设备与材料1. 超声波探伤仪:CTS-22型2. 探头:2.5P1016K2.53. 试块:RB-24. 被检测材料:Q345钢三、实训过程1. 熟悉超声波探伤仪首先,我们学习了超声波探伤仪的基本结构、工作原理、操作方法及注意事项。
超声波探伤仪主要由发射器、接收器、显示器、控制单元等组成。
在实训过程中,我们了解了各个部件的功能及操作方法,并进行了实际操作。
2. 掌握超声波探伤操作(1)将被检测材料放置在试块上,确保耦合良好;(2)调整探伤仪的参数,如探头频率、灵敏度、扫描速度等;(3)在探伤仪上设置合适的检测速度,确保探伤过程中探头与被检测材料的相对速度;(4)按照检测标准,对被检测材料进行扫描,观察示波屏上的波形,分析缺陷;(5)记录检测结果,对缺陷进行标注。
3. 超声波探伤在焊接质量检测中的应用(1)检测焊缝:通过超声波探伤可以检测焊缝中的各种缺陷,如气孔、夹渣、裂纹等,确保焊缝质量;(2)检测焊缝热影响区:可以检测焊缝热影响区中的缺陷,如裂纹、未熔合等;(3)检测材料内部缺陷:可以检测材料内部缺陷,如夹杂物、空洞等。
四、实训成果与分析1. 通过实训,我们掌握了超声波探伤的基本原理、设备操作及检测标准;2. 学会了如何根据检测波形分析缺陷,提高了焊接质量;3. 发现了被检测材料中的部分缺陷,如气孔、夹渣、裂纹等,为后续的焊接工艺改进提供了依据。
五、实训心得体会1. 超声波探伤技术在焊接质量检测中具有重要意义,可以提高焊接质量,确保产品安全可靠;2. 掌握超声波探伤操作方法及检测标准,是焊接专业学生必备的技能;3. 在实训过程中,要注重细节,严格按照检测标准进行操作,确保检测结果准确;4. 超声波探伤技术在实际生产中的应用非常广泛,我们需要不断学习、实践,提高自己的专业技能。
超声波探伤培训教程

超声波探伤培训教程超声波探伤培训教材之理论基础目录第一章无损检测概述第二章超声波探伤的物理基础第三章波的若干概念第四章仪器、探头和试块第五章常用探伤方法和技术第六章板材和管材超声波探伤第七章锻件与铸件超声波探伤第八章焊缝超声波探伤第一章无损检测概述、超声检测(UT) 无损检测包括射线检测(RT) 、磁粉检测、渗透检测(PT)和涡流检测(ET)等五种检测方法。
(MT)主要应用于金属材料制造的机械、器件等的原材料、零部件和焊缝,也可用于玻璃等其它制品。
射线检测适用于碳素钢、低合金钢、铝及铝合金、钛及钛合金材料制机械、器件等的焊缝及钢管对接环缝。
射线对人体不利,应尽量避免射线的直接照射和散射线的影响。
超声检测系指用 A 型脉冲反射超声波探伤仪检测缺陷,适用于金属制品原材料、零部件和焊缝的超声检测以及超声测厚。
磁粉检测适用于铁磁性材料制品及其零部件表面、近表面缺陷的检测,包括干磁粉、湿磁粉、荧光和非荧光磁粉检测方法。
渗透检测适用于金属制品及其零部件表面开口缺陷的检测,包括荧光和着色渗透检测。
涡流检测适用于管材检测,如圆形无缝钢管及焊接钢管、铝及铝合金拉薄壁管等。
磁粉、渗透和涡流统称为表面检测。
第二章超声波探伤的物理基础第一节基本知识超声波是一种机械波,机械振动与波动是超声波探伤的物理基础。
物体沿着直线或曲线在某一平衡位置附近作往复周期性的运动,称为机械振动。
振动的传播过程,称为波动。
波动分为机械波和电磁波两大类。
机械波是机械振动在弹性介质中的传播过程。
超声波就是一种机械波。
机械波主要参数有波长、频率和波速。
波长:同一波线上相邻两振动相位相同的质点间的距离称为波长,波源或介质中任意一质点完成一次全振动,波正好前进一个波长的距离,常用单位为米m;频率 f:波动过程中,任一给定点在1 秒钟内所通过的完整波的个数称为频率,常用单位为赫兹Hz;波速 C:波动中,波在单位时间内所传播的距离称为波速,常用单位为米/秒(m/s)。
AWS D1.1超声波UT检测工艺规程
目的在不损伤被检物使用性能情况下而主要用于探测材料、构件、焊缝或设备等被检物的各种内部缺陷(如:夹渣、裂纹、未焊透等)并判断其位置大小、形状和种类,从而判定被检物的质量状况和质量等级。
1、适用范围本程序适于使用脉冲反射式超声仪的超声检测工艺。
2、人员要求无损探伤人员资质审定需符合 SNT-TC-1A 的要求,或 ISO9712 的要求。
3、职责质检科负责焊缝超声波探伤的实施。
4、依据本程序按照 AWS D1.1(钢结构焊接规范)第六章检验中超声波检测部份编制5、使用仪器及辅助材料5.1 超声波探伤仪(GUN30北京时代、PXUT-330南通友联)5.2 标准试块( IIW)5.3 探头5.4 耦合剂(化学浆糊)6、超声波探伤检测程序根据板厚的不同选择折射角,应选择合适的折射角进行检测,检测角度的选择可以参照 AWS D1.1 表 6.7 或根据检验员的试验结果选择可靠的折射角也可利用多种角度探头对同一工件进行多次检测从而选择最优的折射角度,常规检测可按下表规定选择:7、超声波探伤仪及探头的性能:7.1灵敏度余量仪器和试块,使用 IIW 试块使从 R100 处的反射回波高度在荧光屏上达到75%。
仪器具有至少 40 分贝灵敏度余量。
7.2.时间轴线性(水平线性)按照 AWS D1.1 6.30.1 进行签定7.3.放大线性(垂直线性)按照 AWS D1.1 6.30.2 进行鉴定。
7.4.分辨力按照 AWS D1.1 6.29.2.5 进行鉴定,以至少能分辨三个反射波为合格。
7.5.角度探头的鉴别按照 AWS D1.1 6.29.2.2 进行签定,角度误差必须在±2º范围之内。
8.0 试验表面的准备8.1 所有的焊接飞溅物、锈蚀、油漆、毛刺都应在检验前清除干净。
9.0 焊缝检测9.1 扫查:图 3 为常用扫查方法。
图39.2 最大指示:当在萤光屏上出现不连续性指示时,必须对来自不连续性的可达最大指示进行调节,使得显示器上产生水平对比基准轨迹的偏离。
焊缝超声波探伤(第二节平板对接焊缝的超声波探伤方法)
第四章 焊缝超声波探伤第二节 平板对接焊缝的超声波探伤方法由于焊缝有增强量、表面凹凸不平,以及焊缝中危险性缺陷(裂缝、未焊透)大多垂直于板面,所以,对接焊缝超声波探伤基本方法一般都利用斜探头在焊缝两侧与钢板直接接触后所产生的折射横波进行探测,见图4–4所示。
一、探测面的修整为保证整个焊缝截面都被超声波束扫查到,探头必须在探测面上左右、前后移动,为此,通常要对探测面进行修整。
探测面上的焊接飞溅、氧化皮、锈蚀等应清理掉。
清理的方法可用铲刀、钢丝刷、砂轮等使钢板露出金属光泽。
探测面的修整宽度按GB11345–89标准规定:a. 用一次(直射)波法扫查,则焊缝两测的修整宽度(探头移动区)应大于0.75P :P=2TK (4–1)式中:T 为母材厚度;K 为斜探头折射角的正切(K=tg β)。
b. 用一次反射波法,在焊缝两面两侧扫查,故修整宽度大于1.25P : 二、耦合剂的选用为使超声波能顺利传入工件,在探伤前必须在探测面上涂上耦合剂,常用的耦合剂有机油、化学浆糊、水、甘油等。
耦合剂的选用应考虑:① 工件表面光洁度和倾斜角度 ② 探测频率③ 耦合剂的声透性能④ 保存和使用的方便性⑤ 经济性和安全等各种耦合剂在工件表面光洁度较高时,其声透性能一般相差不大,当工件表面光洁度较差时,选用声阻抗较大的耦合剂,如甘油,可获得较好的声透性能。
三、探头的选择探头选择主要指探头角度和频率的选择 1. 探头角度的选择对于钢质材料,为保证纯横波探测,探头的入射角应在第一临界角(27.5°)和第二临界角(57°)之间,即27.5°<α<57°。
国内过去使用的探头均以入射角标称,如、30°、40°、45°、50°、55°等。
近年来,考虑到为使缺陷定位计算方便,故均改用K 值探头(K=tg β)如K=0.8、K=1、K=1.5、K=2、K=2.5、K=3等。
AWS D1.1 焊缝超声波探伤-精华 (快速学成-最新版)
AWS焊缝超声波探伤细则(AWS D1.1/D1.1M)焊缝超声波探伤精华一.适用范围板厚8~200mm(5/16 in~8in)之间的坡口焊缝和热影响区的超声波检测。
二.探伤仪、探头及系统的性能1.设备要求超声波探伤仪应通过计量检定合格,为A型脉冲及反射式探伤仪,配1~6MHz的探头,增益至少60dB,每档1~2 dB可调。
2.水平线性偏差在2%以内,分辨力能分辨RC试块上三个孔的峰值。
3.直探头(纵波)探头晶片不小于161mm2(1/2in2),同时不大于645mm2(1in2)的工作面积。
4.斜探头4.1频率:2~2.5MHz之间(包括2和2.5MHz)4.2尺寸:晶片尺寸宽度15~25mm,高度15~25mm,最大宽度比1.2:1,最小宽度比1:1。
4.3折射角:应为70°、60°、45°三种,允许误差±2°。
4.4探头内部杂波①增加校准的增益值,高出基准高度20 dB;②在12mm以上的声程和基准高度以上区域无任何杂波;③在标准试块上进行。
三.试块采用国际焊接学会(I I W)标准试块,用于校准水平距离和灵敏度,也可以用其它等效试块。
四.焊缝探伤前的准备1.探头扫查区应无焊接飞溅、油污、油漆、松散氧化皮,扫查面应平滑。
2.扫查区域母材探伤。
2.1在A面检测(参见表-1中的附图);2.2水平距离校准;水平距离至少应有两个板厚长度。
2.3灵敏度调整在母材无缺陷处,底板第一次反射回波调至50%~75%的高度,用此灵敏度检测母材层状缺陷。
2.4缺陷的记录有如下情况影响(干扰)需记录;a. 底部反射全部消失;b. 缺陷波高等于或大于底部反射波高。
有以上缺陷应记录其尺寸大小、位置和距A面的深度。
五.焊缝探伤1.斜探头的选择:1.1探头频率:2~2.5MHz1.2探头尺寸:宽15~25mm,高15~20mm1.3折射角度选择(见表-1)检测角度选择(表-1)工艺卡材料厚度in.[mm]焊缝类型5/16[8]~≤1-1/2[38]>1-1/2[38]~≤1-3/4[45]>1-3/4[45]~≤2-1/2[60]>2-1/2[60]~≤3-1/2[90]>3-1/2[90]~≤4-1/2[110]>4-1/2[110]~≤5[130]>5[130]~≤6-1/2[160]>6-1/2[160]~≤7[180]>7[180] ~≤8[200] * ** ** ** **对接 1 0 1 F 1G或4F1G或5F6或7F8或10F9或11F12或13F 12 FT型 1 0 1F或XF4F或XF5F或XF7F或XF10F或XF11F或XF13F或XF- -角接 1 0 1F或XF1G或4F或XF1G或5F或XF6或7F或XF8或10F或XF9或11F或XF13或14F或XF- -气电焊和电渣焊1 0 1 01G或41**1G或3P1或P36或7P311或15P311或15P311或15P311或15**P3符号说明:X —从“C”面检验。
焊缝超声波探伤操作步骤
焊缝超声波探伤操作步骤一、探头前沿长度的测量。
将探头放置在CSK—ⅠA试块上,将入射点对准R100处,找出反射波达到最高时探头到R100端部的距离。
然后用其所长100减去此段距离。
此时所得的数据就是探头的前沿距离。
按此方法连测三次,求出平均值。
二、测量探头的K值利用CSK—ⅠA试块上的φ50孔的反射角测出并用反三角函数计算出K值。
将探头对准试块上φ50横孔,找到最高回波:则有K=tgβ=(L+l-35)/30。
三、扫描速度的调节1、水平调节法:将探头对准R50、R100,调节仪器使B1、B2分别对准不平刻度,此时计算出l1、l2。
l1,l2将计算出的数据在示波屏上将B1和B2调至相对应的位置,此时水平距离扫描速度为1:1。
2、深度调节法利用CSK-ⅠA试块调节,先计算R50、R100圆弧反射波B1、B2对应的纵深d1、d2:d1,d2B1、B2分别对准水平刻度值d1、d2。
如K=2时,经计算d1=、d2=。
调节仪器使B1、B2分别对准和平共处,这时深度1:1就调节好了。
四、距离——波幅曲线的绘制1、将探头置于CSK-ⅢA试块上,衰减48dB,调增益使深度为10mm的φ1×6孔的最高回波达基准60%,记录此时的衰减器读数和孔深,然后分别探测其它不同深度的φ1×6孔,增益不动,调节衰减器将各孔的最高回波调至60%高,记下相应的dB值和孔深填入表中。
2、以孔深为横坐标,以分贝值为纵坐标,在坐标纸上描点绘出定量线、判废线和评定线,标出Ⅰ区、Ⅱ区、Ⅲ区,并注明所用探头的频率、晶片尺寸和K值。
3、现以T=30mm举例说明50403020101020304050D BM m五、 调节探伤灵敏度调节探伤灵敏度时,探伤灵敏度不得低于评定线,一般以2倍的壁厚处所对应的评定线dB 值,也就是说在工件60mm 处评定线所对应的分贝值。
如若还要考虑耦合补偿,补偿根据实际情况而定。
六、探测钢板1、初扫,找缺陷,怀疑处作好标记。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AWS
焊缝超声波探伤细则(AWS D1.1/D1.1M)
焊缝超声波探伤精华
一.适用范围
板厚8~200mm(5/16 in~8in)之间的坡口焊缝和热影响区的超声波检测。
二.探伤仪、探头及系统的性能
1.设备要求
超声波探伤仪应通过计量检定合格,为A型脉冲及反射式探伤仪,配1~6MHz的探头,增益至少60dB,每档1~2 dB可调。
2.水平线性偏差在2%以内,分辨力能分辨RC试块上三个孔的峰值。
3.直探头(纵波)
探头晶片不小于161mm2(1/2in2),同时不大于645mm2(1in2)的工作面积。
4.斜探头
4.1频率:2~2.5MHz之间(包括2和2.5MHz)
4.2尺寸:晶片尺寸宽度15~25mm,高度15~25mm,最大宽度比1.2:
1,最小宽度比1:1。
4.3折射角:应为70°、60°、45°三种,允许误差±2°。
4.4探头内部杂波
①增加校准的增益值,高出基准高度20 dB;
②在12mm以上的声程和基准高度以上区域无任何杂波;
③在标准试块上进行。
三.试块
采用国际焊接学会(I I W)标准试块,用于校准水平距离和灵敏度,也可以用其它等效试块。
四.焊缝探伤前的准备
1.探头扫查区应无焊接飞溅、油污、油漆、松散氧化皮,扫查面应平
滑。
2.扫查区域母材探伤。
2.1在A面检测(参见表-1中的附图);
2.2水平距离校准;
水平距离至少应有两个板厚长度。
2.3灵敏度调整
在母材无缺陷处,底板第一次反射回波调至50%~75%的高度,用此灵敏度检测母材层状缺陷。
2.4缺陷的记录
有如下情况影响(干扰)需记录;
a. 底部反射全部消失;
b. 缺陷波高等于或大于底部反射波高。
有以上缺陷应记录其尺寸大小、位置和距A面的深度。
五.焊缝探伤
1.斜探头的选择:
1.1探头频率:2~
2.5MHz
1.2探头尺寸:宽15~25mm,高15~20mm
1.3折射角度选择(见表-1)
检测角度选择(表-1)
工艺卡
材料厚度in.[mm]
焊缝类型
5/16[8]
~
≤1-1/2[38]
>1-1/2[38]
~
≤1-3/4[45]
>1-3/4[45]
~
≤2-1/2[60]
>2-1/2[60]
~
≤3-1/2[90]
>3-1/2[90]
~
≤4-1/2[110]
>4-1/2[110]
~
≤5[130]
>5[130]
~
≤6-1/2[160]
>6-1/2[160]
~
≤7[180]
>7[180] ~
≤8[200] * ** ** ** **
对接 1 0 1 F 1G
或
4
F
1G
或
5
F
6
或
7
F
8
或
10
F
9
或
11
F
12
或
13
F 12 F
T型 1 0 1
F
或
XF
4
F
或
XF
5
F
或
XF
7
F
或
XF
10
F
或
XF
11
F
或
XF
13
F
或
XF
- -
角接 1 0 1
F
或
XF
1G
或
4
F
或
XF
1G
或
5
F
或
XF
6
或
7
F
或
XF
8
或
10
F
或
XF
9
或
11
F
或
XF
13
或
14
F
或
XF
- -
气电焊
和电渣焊
1 0 1 0
1G
或
4
1**
1G
或
3
P1
或
P3
6
或
7
P3
11
或
15
P3
11
或
15
P3
11
或
15
P3
11
或
15**
P3
符号说明:
X —从“C”面检验。
G —焊缝打磨平齐。
O —无要求。
A面—材料上的扫查开始面(T型和角接接头见上图)。
B面—A面的对面(同一块板上)。
C面—在T型或角接接头所连接构件焊缝的外侧面。
*只有从表中第一栏中选取一项基本方式作搜索扫查,发现在焊缝金属和母材界面处有不连
续的基准高度指示时,才作此项检测。
** —用15in.[400mm]或20in.[500mm]屏幕距离校准。
P —此符号表示用串列法检测,即用同规格45°或70°探头使用扫查夹具,做一收一发检
查。
F —必须选用70°、60°或45°换能器之一,对焊缝金属及热影响区进行检测,按声束近
似垂直于坡口面选择探头角度。
表—1中的符号说明见表—2。
工艺符号说明(表-2)
焊缝厚度区域
NO. 顶部1/4 中部1/2 底部1/4
1 70°70°70°
2 60°60°60°
3 45°45°45°
4 60°70°70°
5 45°70°70°
6 70°G A 70°60°
7 60°B 70°60°
8 70°G A 60°60°
9 70°G A 60°45°
10 60°B 60°60°
11 45°B 70°** 45°
12 70°G A 45°70°G B
13 45°B 45°45°
14 70°G A 45°45°
15 70°G A 70°A B 70°G B 2.探伤面的选择
一般情况下选用A进行扫查,靠近A面的焊缝即上面1/4部位需在B面用直射法检测或从A面用一次反射法检测。
靠近底部1/4的焊缝,需在A面用直射法扫查。
3.扫查方式(见图—1)
4.扫查灵敏度应在基准灵敏度基础上再提高若干dB值,提高的dB值按表—3进行。
六.评定值“d”的计算方法
扫查中遇到缺陷按如下公式计算评定值d。
a―b―c=d(dB)(适用于增益型仪器)
6.1.使用按规定选择的探头在I I W试块上对准φ1.5mm孔,找到最大
反射回波,并调到50%~70%某一高度,记录dB值为“b”(基准值)。
6.2.在扫查中发现缺陷,找到最大回波并调到6.1项中的相同高度读
dB值作为“a”(缺陷指示值)。
6.3. c为1英寸以外至缺陷处声程衰减dB值。
七.缺陷测长
缺陷测长采用最大缺陷反射回波两侧平行移动,反射回高降低50%时,探头移动的中心距离为缺陷的长度。
八.合格与判废标准
A级(大缺陷):任何这级缺陷,不管长度大小,一律判废;
B级(中缺陷):>20mm的缺陷判废;
C级(小缺陷):>50mm的缺陷判废;
D级(细小缺陷):不计长度均合格。
8.1 A、B、C、D级的判定。
在静载荷情况下,根据评级参数d,按表—4进行。
对接接头焊缝尺寸必须为所连接的两个部件中较薄者的公称厚度。
注:
1.B级和C级缺陷必须至少隔开2L(L为不连续性较大者的长度),但下述情况除外:
当两个或更多个缺陷不是隔开至少2L、而是这些缺陷的总和长度与它们相隔距离的总和等于或小于B级或C级规定的缺陷最大容许长度,则这种缺陷必须被视为单个的合格缺陷。
2.B级和C级缺陷距离承受拉应力的焊缝端部的长度严禁小于2L(L为缺陷长度)。
3.如果接头完全熔透(CJP)的双面坡口焊缝在图纸上被注明“受拉焊缝”时,则该双
面坡口焊缝钝边区域中检测出的缺陷,必须要用高出4dB灵敏度的额定指示值进行判断(从指示额定值“d”中减去4dB)。
如果这一接头焊缝系背部清根至完全好金属以
清除钝边并且用MT证实钝边已被清除,则严禁应用本要求。
衰减因子C公式:(声程-25)*0.08
Tab. -6 Ultrasonic Testing Record 共页
第页Page of
探伤灵敏度与板厚范围的关系:。