第2章3_单元刚度方程和单元刚度矩阵
单元刚度矩阵的计算-回复
单元刚度矩阵的计算-回复首先,我们需要了解刚度是什么。
刚度是指材料抵抗形变的性质。
在结构中,它表示了结构单元(如梁或柱)受到外部力作用时的形变反应。
刚度可以用它对这些力的反应程度来测量。
计算单元刚度矩阵的第一步是建立结构单元的局部坐标系。
局部坐标系是以结构单元自身为参考的坐标系,用于描述结构单元的几何特征和材料性质。
接下来,需要确定结构单元的几何特征和材料性质。
这包括结构单元的长度、截面形状、材料弹性模量等。
这些参数将用于计算结构单元的刚度。
然后,需要建立结构单元的位移-应变关系。
位移-应变关系是描述结构单元变形特征的方程。
它可以通过应变能原理或力平衡方程得到。
接下来,可以使用有限元分析方法推导出结构单元的刚度矩阵。
有限元分析方法将连续的结构分割为离散的有限单元,然后对每个单元进行力学分析。
在计算单元刚度矩阵时,可以使用单元的位移-应变关系和材料性质来推导出刚度矩阵的公式。
最后,根据结构单元的连通性和边界条件,可以将单元刚度矩阵组装成整个结构的刚度矩阵。
这样可以得到整个结构的刚度参数。
计算单元刚度矩阵的过程中,还需要注意以下几个问题:1.确保结构单元的局部坐标系的选择是合理的,以便正确描述结构单元的几何特征。
2.确保位移-应变关系的推导是准确的,可以选择适当的理论或公式来得到位移-应变关系。
3.在有限元分析方法中,需要选择适当的数值方法和积分方法来计算刚度矩阵。
4.在组装整个结构的刚度矩阵时,需要正确处理结构单元之间的连通性和边界条件。
总之,单元刚度矩阵的计算是一个繁琐而重要的任务。
它需要合理的坐标系选择、准确的位移-应变关系、适当的数值方法和正确的组装过程。
通过计算出单元的刚度矩阵,可以通过有限元分析方法分析结构的静力性能。
9第2章弹性力学平面问题及空间问题有限元
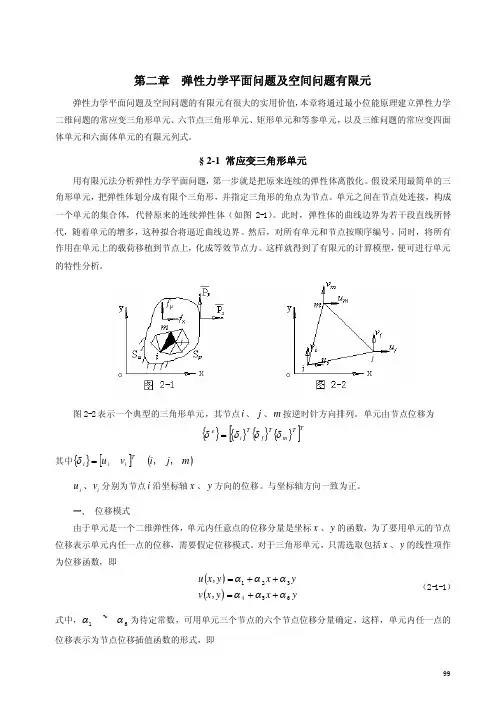
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
有限元方法 第二章 矩阵位移法概述
{F e } [K e ]{δ e } 表达的杆端力和杆端位移的关系,对
应于一个完全的自由单元,没有任何支承约束,可以 有任意的刚体位移。 (3) 位置无关性 局部坐标系中的单元刚度矩阵 [K ],只与单元的几何形 状、尺寸和物理常数有关,与单元在结构中的位置无关。
e
矩阵位移法的单元体现了更强的通用性。
u j 1 v j 1 j 1
EA l 0 0 EA l 0 0 12 EI 6 EI 3 l l2 6 EI 2 EI 2 l l 0 0 12 EI 6 EI l3 l2 6 EI 4 EI 2 l l 66 0 0
理论基础:位移法 ;分析工具:矩阵 ;
计算手段:计算机
二、矩阵位移法的思路 :
1)离散,进行单元分析,建立单元杆端力和杆端 位移的关系。 2)集合,进行整体分析,建立结点力与结点位移 的关系。 任务 意义
单元 分析 建立杆端力与杆端位移 间的刚度方程,形成单 元刚度矩阵 用矩阵形式表示杆 件的转角位移方程
(2) 连续梁单元
若把连续梁两支座间的一跨取 作单元,杆端位移条件为: u1e 0, v1e 0,u 2e 0 , v2e 0 。
杆端位移向量与单元杆端力向量为:
其中
ui 1
vi 1 i 1
0 12 EI l3 6 EI l2 0 12 EI l3 6 EI l2 0 6 EI l2 4 EI l 0 6 EI l2 2 EI l
u j 1 v j 1 j 1
EA l 0 0 EA l 0 0 12 EI 6 EI 3 l l2 6 EI 2 EI 2 l l 0 0 12 EI 6 EI l3 l2 6 EI 4 EI 2 l l 66 0 0
02-04 单元刚度矩阵
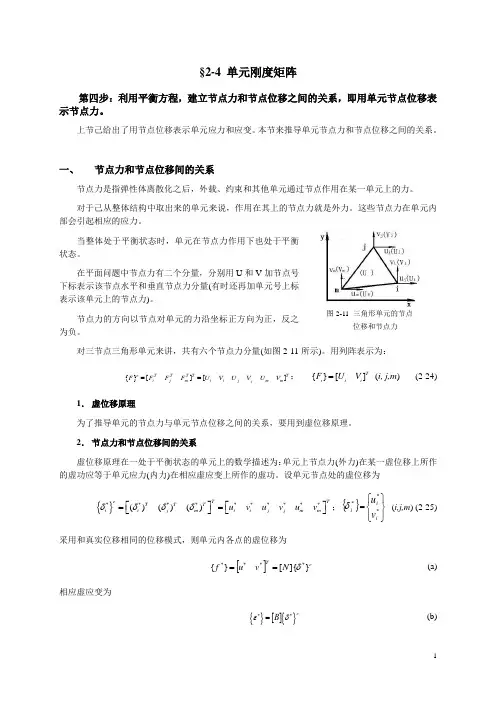
1§2-4 单元刚度矩阵第四步:利用平衡方程,建立节点力和节点位移之间的关系,即用单元节点位移表示节点力。
上节己给出了用节点位移表示单元应力和应变。
本节来推导单元节点力和节点位移之间的关系。
一、 节点力和节点位移间的关系节点力是指弹性体离散化之后,外载、约束和其他单元通过节点作用在某一单元上的力。
对于己从整体结构中取出来的单元来说,作用在其上的节点力就是外力。
这些节点力在单元内部会引起相应的应力。
当整体处于平衡状态时,单元在节点力作用下也处于平衡状态。
在平面问题中节点力有二个分量,分别用U 和V 加节点号下标表示该节点水平和垂直节点力分量(有时还再加单元号上标表示该单元上的节点力)。
节点力的方向以节点对单元的力沿坐标正方向为正,反之为负。
对三节点三角形单元来讲,共有六个节点力分量(如图2-11所示)。
用列阵表示为:{}[][]eTTT TTijm iijj m m F F F F U V UV U V ==; {}[] (Ti i i F U V i ,j ,m= (2-24) 1. 虚位移原理为了推导单元的节点力与单元节点位移之间的关系,要用到虚位移原理。
2. 节点力和节点位移间的关系虚位移原理在一处于平衡状态的单元上的数学描述为:单元上节点力(外力)在某一虚位移上所作的虚功应等于单元应力(内力)在相应虚应变上所作的虚功。
设单元节点处的虚位移为{}**********()()()eTTTTTii j m iijjmm u v u v u v δδδδ⎡⎤⎡⎤==⎣⎦⎣⎦;{}*iδ=⎭⎬⎫⎩⎨⎧**i i v u (i,j,m ) (2-25) 采用和真实位移相同的位移模式,则单元内各点的虚位移为[]eTN vuf }]{[}{****δ== (a)相应虚应变为{}[]{}εδ**=B e(b)2 于是虚功方程可写成{}{}⎰⎰=eT e T e ytx F d d }{)}({**σεδ (2-26)将(b)式及(2-18)式代入上式,得[]{}[][]{}({}){}()d d **δδδe T eeTeeF B D B x yt =⎰⎰根据矩阵乘法逆序法则,上式可以写成[][][]{}({}){}({})d d **δδδeTeeTTeeF B D B x yt =⎰⎰由于列阵{}e*δ中的元素是常量,即与单元内点的位置坐标x ,y 无关,上式右边的T e )}({*δ可以提到积分号前面去。
单元类型及单元刚度矩阵课件
面积单元的刚度矩阵可以通过解析方 法或数值方法计算得到。
它具有四个节点,每个节点具有三个 自由度:x、y和z方向的位移。
体积单元
体积单元是一种几何 形状,通常用于模拟 结构中的三维实体或 区域。
体积单元的刚度矩阵 可以通过解析方法或 数值方法计算得到。
它具有八个节点,每 个节点具有三个自由 度:x、y、z方向的 位移。
移。
线性单元的刚度矩阵可以通过解 析方法或数值方法计算得到。
角点单元
角点单元是一种特殊类型的线 性单元,通常用于模拟结构中 的角点或连接两个线性单元的 节点。
它具有三个自由度:x、y和z方 向的位移。
角点单元的刚度矩阵可以通过 解析方法或数值方法计算得到。
面积单元
面积单元是一种几何形状,通常用于 模拟结构中的平面区域或曲面上的小 区域。
单击此处添加正文,文字是您思想的提一一二三四五 六七八九一二三四五六七八九一二三四五六七八九文, 单击此处添加正文,文字是您思想的提炼,为了最终 呈现发布的良好效果单击此4*25}
通过稳定性分析,可以评估结构的承载安全性和预防 失稳的措施。
PART 04
单元类型选择与注意事项
选择依据
计算精度
根据模型精度要求选择合适的单 元类型,例如,对于复杂形状或 精细结构,应选择高阶单元以提
2023 WORK SUMMARY
单元类型及单元刚度 矩阵课件
REPORTING
CATALOGUE
• 单元类型介绍 • 单元刚度矩阵
PART 01
单元类型介绍
线性单元
线性单元是一种简单的几何形状, 通常用于模拟结构中的直线段或 平面区域。
它具有两个节点,每个节点具有 三个自由度:x、y和z方向的位
第二章 刚度矩阵法
x lx mx nx x
y
l
y
my
n
y
y
z lz mz nz z
lx mx nx
T l y
my
n
y
lz mz nz
T
§2.5 基本步骤
•单元刚度矩阵的建立:
K e e f e f TF
K eTe TFe
T T K eTe F e Κe T T K eT Κee F e
x y z T
平面刚架
f x f y M z T
x y z T
空间刚架
f x f y f z M x M y M z x y z x y z
平面板架
f z M x M y T
z x y T
§2.2 位移模式
位移模式是建立起单元内任一点位移与节点之 间的关系 •轴向变形 •扭转变形 •弯曲变形
BT DBdV f
V
*T
*T
BT DBdV f
V
*T
*T
BT DBdV f V
BT DBdV f
V
BT DBdV f
V
K f
K BT DBdV V
§2.4 坐标变换
Z Y’
Z’ X
Y X’
x y z T
x y z T
x x cos(x, x' ) y cos(x, y' ) z cos(x, z' )
•轴向变形
ux a bx
I
J
ix a bx a jx a bL
i
b jx ix
L
L
ΔL
j L
ux
ix
jx
ix
L
有限单元法部分课后题答案
1.1 有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的?(1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。
(2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。
因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。
(3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。
1.3 单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别?单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。
整体刚度矩阵的性质:对称性、奇异性、稀疏性。
单元Kij物理意义Kij 即单元节点位移向量中第j个自由度发生单位位移而其他位移分量为零时,在第j个自由度方向引起的节点力。
整体刚度矩阵K 中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。
2.2什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件?(1)在外力作用下,物体内部将产生应力σ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。
(2)外力势能就是外力功的负值。
(3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零δ∏p=δ Uε+δV=0此即变分方程。
对于线性弹性体,势能取最小值,即δ2∏P=δ2Uε+δ2V≥0此时的势能变分原理就是著名的最小势能原理。
第2章3_单元刚度方程和单元刚度矩阵
y
EA l EA l
x
平面梁单元的单元刚度矩阵
ui=1 vi =1 θi=1 uj=1 vj=1 θj=1
ui=1
y vi
1 6EI l2
ui
1
l
6EI l2 12EI l3 12EI l3
Ni
x
EA l
0
12 EI l3
0
− 6 EI l2
− EA l
0
0
vi=1
l
4EI l
Qi
x
6EI l2
0 0
第三节 单元刚度方程和单元 刚度矩阵
单元的杆端力和杆端位移之间的关系是通过单元刚 度方程反映出来的, 度方程反映出来的,本节重点掌握单元刚度矩阵中 每个刚度系数的物理意义,由此求得不同杆单元的 每个刚度系数的物理意义, 刚度矩阵。 刚度矩阵。
(1)单元刚度方程
单元的刚度方程:
F ( e ) = K ( e )δ( e ) 单元的刚度方程给出了单元的杆端位移 单元的刚度方程给出了单元的杆端位移δ(e)与杆端力F(e) 之间的关系. 之间的关系 称为单元刚度矩阵 单元刚度矩阵。 其中矩阵K(e) 称为 单元刚度矩阵。 单元刚度矩阵是一 个方阵. 它的阶数和内容视单元而定。 个方阵 它的阶数和内容视单元而定 。如杆端位移 δ(e) 阶向量, 方阵。 阶向量 方阵 和杆端力F(e)为6阶向量,则K(e)为6X6方阵。
l
y
3EI l
0 0
− EA l
0 0
EA l
θi=1
3EI l2
0i
1 3EI l2
Mi
Nj
l
− 3EI l2
3EI l
3EI l2
第二章 有限元法的直接刚度法
Qi
=[Qi Mi ]
T
=[ fi θi ]
T
Mi
f-挠度(上为正)θ-转角(逆时针为正); Fy-外部集中力Mz-外部扭矩
qj f j
i e j
qi fi
mi θi
单元特性- 每个单元2个节点,每个
X’
mj θ
j
节点2个位移即2个自由度。则每个单元共 4个自由度
节点力-单元与节点之间的作用力 pi=
l2 l
kjj -6EA 4EA
l2 l
l
3
l
2
e 单元刚度矩阵[K] 的子矩阵块[ k i j ] 表示: 当 j 节点发生
单位位移,且其他节点位移为0时,对应于 i 节点的节点力
2.1.4
直梁总体刚度矩阵
有限元法是把一个连续体,简化为由有限个离散单元 组合而成的等效离散模型进行求解的。
F A B C M D
i
e
j
X’
单元
2.1.1
划分单元
划分单元的原则: 杆件的交点、界面变化处、支撑点 和自由端、集中载荷处、欲求位移 处、单元大小尽量一致。
2.1.2 直梁节点位移,力与载荷
Y
Qi f i
Mi θi
Fy 1 ① Mz 2 ② 3 ③ 4 X
节点载荷 -节点处所受的外力
节点位移δi=
y’
fi θi
Qi=
内力Q-剪力M-弯矩
qi
mi
=[ qi mi ]
T
一、度量梁变形的两个基本位移量
1.挠度:横截面形心沿垂直于轴线方向的线位移。用w表示。 与 y 同向为正,反之为负。 y C w C1
P
x
单元刚度矩阵的计算 -回复
单元刚度矩阵的计算 -回复
单元刚度矩阵的计算是有一定复杂性的,需要根据具体的有限元模型及载荷情况进行计算。
一般来说,单元刚度矩阵的计算可以分为两步:建立单元刚度矩阵的方程式,以及求解方程式得到刚度矩阵。
建立单元刚度矩阵的方程式需要先利用有限元理论对结构进行离散化,将结构分割成若干个单元。
然后,在每个单元内分别建立单元刚度矩阵的方程式,考虑到每个单元都具有规律性,所以可以先建立一个一般的单元刚度矩阵的方程式,然后通过坐标变换等方法转化为特定单元中的方程式。
具体地讲,单元刚度矩阵的计算可以采用有限元理论中的形函数方法,通过利用形函数和单元的积分关系来求解单元刚度矩阵。
在具体实现中,可以考虑使用数值积分方法,如高斯积分等。
通过将形函数和数值积分方法代入单元刚度矩阵方程式,即可得到单元刚度矩阵的表达式。
求解方程式得到刚度矩阵时,可以采用线性方程组求解的方法,如高斯消元法、LU分解法、雅可比迭代法等。
求解得到的刚
度矩阵可以用于后续分析计算中。
总之,单元刚度矩阵的计算需要综合运用有限元理论、数值分析方法和线性方程组求解方法等知识,同时也需根据具体情况做出适当的假设和近似,才能得到合理可靠的结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 如:单元刚度矩阵中第i列的元素表示第i号位移为一单位 值(ui=1,其它为0) 时引起的六个杆端力。单元刚度矩阵中 的每一个元素称为刚度系数, 刚度系数表示一个力。 • 矩阵中第r行s列的元素krs,表示第s号位移为一单位值时引 起沿第r个杆端力。由反力互等定理可知 krs=ksr。 所以单元 刚度矩阵是一个对称矩阵。它的每一个元素的值都可由结 构力学中位移法的刚度方程中获得。
EA 0 EA 0 0 l l 3 EI 3 EI 3 EI 0 0 3 2 3 l l l (e) EA 0 0 0 K EA l l 3 EI 3 EI 3 EI 0 3 0 3 2 l l l 3EI 3EI 0 3EI 0 2 2 l l l
单元刚度矩阵物理意义
利用矩阵乘法,展开可得:
F1 k11u1 k12u 2 k13u3 k14u 4 k15u5 k16u6 F2 k 21u1 k 22u2 k 23u3 k 24 u4 k 25u5 k 26u6 F3 k31u1 k32u2 k33u3 k34u4 k35u5 k36u6 F4 k 41u1 k 42u2 k 43u3 k 44 u4 k 45u5 k 46u6 F5 k51u1 k52u2 k53u3 k54u 4 k55u5 k56u6 F6 k 61u1 k 62u 2 k 63u3 k 64u 4 k 65u5 k 66u6
F1 k11 F k 2 21 F3 k31 F4 k 41 F5 k51 F6 k61 k12 k 22 k32 k 42 k52 k62 k13 k 23 k33 k 43 k53 k63 k14 k 24 k34 k 44 k54 k64 k15 k 25 k35 k 45 k55 k65 k16 u1 u k 26 2 k36 u3 k 46 u4 k56 u5 k66 u6
y u j (2) 平面桁架单元 l
i
FNi
i
FNj
x
• 平面桁架单元只有轴向变形, 杆端力也只有轴力;
y
FNi
y
FNj
i ui l j
x
FN i
j i l
FNj
x
uj
单元的杆端力向量可表示为: F(e)={FNi 0 FNj 0 } T y 单元杆端位移向量可表示为 :δ(e)={ui vi uj vj } T x Fi j Fj 根据单元刚度矩阵的物理意义, 由 u FNl FN EA u 得单 EA l uj i 元的刚度方程为 : l
0 6 EI l2 4 EI l 0 6 EI l2 2 EI l
0 12EI l3 6 EI l2 0 12EI l3 6 EI l2
平面两端刚节点梁单元的单元刚度矩阵为:
EA l 0 0 EA l 0 0 0 12EI 3 l 6EI 2 l 0 12EI 3 l 6EI 2 l 0 6EI 2 l 4EI l 0 6EI 2 l 2EI l EA l 0 0 EA l 0 0 0 12EI 3 l 6EI 2 l 0 12EI 3 l 6EI 2 l 0 6EI 2 l 2EI l 0 6EI 2 l 4EI l
ui=1
x x
vi =1
θi=1
uj=1
vj=1
vi=1
Ni
EA l
0
3EI l3
0
3EI l2
EA l
0
3EI l3
l l y y
3EI 3EI l l
Qi
x x
3EI 3EI l2 l2
0 0
EA l
0 0
EA l
θi=1
3EI 3EI l2 l2
0 0ii
1 1
Mi
Nj
v vjj
y
6EI l2
6EI 2 4EI l6EI l 0 1
l2
4EI l
x
l
6 EI l2
2 EI l
Nj
EA l
6EI l2
l
l
0
6EI l2
0
6 EI l2
0
12EI l3
0
6 EI l2
x
u l
12EI l3
j
1
y
vj
6EI l2
Qj
1
0 0
12EI l3
0 0
vj=1
x
6EI 12EI l2 3 l 12EI l3
1 1
l l
3EI 3EI l2 l2 3EI 3EI l3 l3
3EI l2
3EI l
3EI l2
0
3EI l3
0
3EI l2
0
3EI l3
vj=1
l l
3EI 3EI l3 l3
Qj
0
0
分别填写在ui=1 ,vi =1 ,θi=1, uj=1,vj=1, 作用下,杆左右端 截面的轴力、剪力、弯矩及右端截面的轴力、剪力。由此可得单 元的刚度方程:
vj
w
j
T
T
K ( e)
(6) 空间刚架单元
• 空间刚架单元每个节点具有应有6个自由度,即沿三个坐 标轴方向的线位移及分别绕三个坐标轴的转角 。杆端位 移和杆端力向量均为12阶。
单元的杆端力向量可表示为:
(e)
F FNi FQiy FQiz Mix Miy Miz FN j FQ jy FQ jz M jx M jy M jz
uj=1
x
EA l
y
6EI l2
l l
l
l
y
6EI l2
2EI EI l 6EI l x l2 EI uj 1 6EI l l2 uj 1 EA l
Mi
x
2EI l
y
12EI l3
0j 1
j
12EI l3
6EI l2
6EI l2
x 4 EI
0 0
EA l
6EI 12EI l2 l3
2EI l
若单元 i 端为刚结点, j 端为铰结点, 则单元刚度 矩阵为:
K (e)
EA 0 l 0 3EI l3 3EI 0 2 l EA 0 l 0 3EI l3
0 3EI l2 3EI l 0 3EI l2
EA 0 l 0 3EI l3 3EI 0 l2 EA 0 l 3 EI 0 3 l
则刚度矩阵:
1 0 (e) K 1 0
0 1 0 0 0 1 0 0
0 0 EA 0 l 0
(3)平面两端刚结点梁单元
• 平面两端刚节点梁单元在一般情况下单元上作用着杆端力: 轴力、剪力和弯矩,单元的刚度方程为:
F
(e)
K δ
(e)
(e)
Mj
x
FN j FQj
l
平面梁单元的单元的刚度方程为:
EA 0 l 12EI N i 0 Q l3 i 6 EI 0 M i l2 EA N j 0 Qj l 12EI 0 M j l3 6 EI 0 l2 EA l 0 0 EA l 0 0 6 EI u 2 i l v 2 EI i i l u 0 j v j 6 EI l 2 j 4 EI l 0
N N
FNi EA 0 l 0 EA FNj l 0 0
0 EA 0 u i l 0 0 0 v i EA 0 u j 0 l v 0 0 0 j
K
(e)
• 单元刚度矩阵常用子块形式表示:
K (e )
(e ) K ii (e ) K ji (e ) K ij (e ) K jj
其中每个都是3×3的方阵,子块 K(e)ij表示杆端j 作用一单 位位移时, 杆i 端引起的杆端力。
(4)一端刚结点另一端铰结点 的梁单元
• 铰支端一般只有两个位移需计算. 铰结点的转角位移可认为 它是不独立的而不予考虑. 这样单元的杆端位移向量及杆端 力向量都只有五阶. 单元刚度矩阵为5×5:
E
F (e) K (e)δ(e)
如梁右端为铰结点,则:
δ
(e)
C
{ui
vi i u j
FQi Mi
v j}
FNj
T
A
B E
F FNi
EA l 0 0 EA l 0 0 0 0 0 0 0 0 0 0 0 0 0 0 EA l 0 0 EA l 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Hale Waihona Puke (e) u0 0
FN j
0 0
vi
wi
uj
若单元 i 端为铰结点, j 端 为刚结点, 同样可建立起单 元刚度矩阵:
(5) 空间桁架单元
• 空间桁架单元每个节点具有x、y、z方向的三个位移分量。
单元的杆端力向量可表示为:
F
(e)
FN i
i
单元杆端位移向量可表示为 : (e) (e) (e) 单元的刚度方程为: F K 根据单元刚度矩阵的物理意义得: