多刚体系统动力学Lagrange模型及计算机仿真
动力学系统的建模与仿真研究

动力学系统的建模与仿真研究动力学系统是指由物理、化学、生物等领域中各种运动的学科所引起的不同类型的系统,它们的运动可以用动力学方程来描述。
这些方程在很多领域中有着广泛的应用,比如说天文学、机械工程、地球物理学等等。
本文将从动力学系统的建模和仿真角度,介绍动力学系统的研究现状。
一、动力学系统的建模建模是动力学系统研究的第一步,它的目的是将复杂的系统简化为可以用数学模型描述的形式。
从而我们可以通过分析这些模型,来了解系统运动的规律。
1.物理学中的动力学系统建模物理学中经典的动力学系统建模方法是拉格朗日法和哈密顿原理。
拉格朗日法是以作用量为基础来建立系统的动力学方程,常用于描述自由度较少、同时具有完整坐标和简正坐标的系统。
哈密顿原理是以哈密顿量为基础来建立系统的动力学方程,常用于描述自由度较多、同时具有广义坐标和广义动量的系统。
2.化学中的动力学系统建模化学中的动力学系统建模主要是通过反应速率常数和反应机理模型来描述化学反应过程。
动力学方程的形式可以是常微分方程、偏微分方程或者代数方程等等。
化学反应模型的选择需要考虑多方面因素,包括反应物浓度、反应时间、反应温度等等。
3.生物学中的动力学系统建模生物学中的动力学系统建模需要考虑生物体所涉及的多种因素,比如说神经、内分泌、交感、免疫系统等等。
建立生物体动力学模型的方式包括微分方程、回归分析、非线性方程等等。
二、动力学系统的仿真研究建立动力学系统数学模型之后,我们可以进行仿真研究。
仿真实验可以帮助我们更好地理解动力学系统,了解其运动规律。
1.仿真方法常见的动力学系统仿真方法包括基于块图的仿真方法、基于Matlab/Simulink的仿真方法、虚拟现实仿真方法等等。
块图仿真方法是通过图形化拖拉组件进行仿真实验。
Matlab/Simulink仿真方法是采用模块化的思想进行模型建立和仿真。
虚拟现实仿真方法可以呈现更为真实且具有沉浸感的仿真体验,它通常用于通过建立三维模型来实现仿真。
多体系统动力学行为的数值模拟与分析
多体系统动力学行为的数值模拟与分析引言:多体系统是一个具有多个相互作用体组成的复杂系统,如分子集合、物理颗粒等。
研究多体系统的动力学行为对于理解物质的宏观行为具有重要意义。
然而,由于各个体之间相互关系的复杂性,实际观测和分析多体系统的动力学行为是一项具有挑战性的任务。
因此,使用数值模拟方法对多体系统进行仿真与分析成为研究者关注的焦点。
一、多体系统建模与数值模拟方法1.1 粒子系统模型粒子系统模型是一种常用的多体系统建模方法。
它将多体系统中的每个个体看作一个质点,通过质点之间的相互作用力来描述整个系统。
常见的粒子系统模型包括分子动力学模型和颗粒动力学模型等。
1.2 数值模拟方法为了对多体系统进行精确的仿真与分析,研究者使用了多种数值模拟方法。
其中,蒙特卡洛方法用于模拟统计学问题,分子动力学方法用于模拟分子集合的动态行为,离散元方法用于模拟颗粒集合的力学行为等。
二、动力学行为的数值模拟与分析2.1 物质的运动行为在多体系统中,个体之间的相互作用力决定了整个系统的运动行为。
通过数值模拟方法,可以研究物质的运动规律和行为。
例如,通过分子动力学模拟可以模拟和分析分子在溶液中的运动行为和化学反应过程,通过离散元方法可以模拟和分析颗粒在固体材料中的运动和变形过程。
2.2 相变和相变动力学相变是多体系统中重要的现象之一,如固液相变、液气相变等。
通过数值模拟与分析,可以研究相变的过程和机制。
例如,通过蒙特卡洛方法可以模拟和分析固液相变的温度-时间相图,通过相变动力学模拟可以模拟和分析相变界面的动力学行为。
2.3 动力学行为的变化和预测多体系统中的动力学行为可能受到多种因素的影响,如外界条件的变化、相互作用的改变等。
通过数值模拟和分析,可以研究动力学行为的变化和预测。
例如,通过改变分子之间的相互作用力可以研究材料的力学性质的变化,通过改变颗粒的形状和大小可以预测颗粒群体的流动行为等。
三、数值模拟与实验验证数值模拟方法在研究多体系统动力学行为方面具有重要作用,然而,仅依靠数值模拟结果可能存在误差和局限性。
多刚体系统动力学理论概述
多刚体系统动力学理论概述多刚体系统动力学的研究方法包括Lagrange方法、Newton-Euler方法、Roberson-Wittenburg方法、Kane方法和变分法等。
基于第一类Lagrange方程建立带乘子的最大数目动力学方程,对推导任意多刚体系统的运动微分方程提供了一种规范化的方法,其主要特点有:为减少未知量数目,选择非独立的笛卡儿广义坐标;运动微分方程中不包含约束反力,利于求解;在方程中引入动能和势能函数,求导计算量随分析系统的刚体数目增加而大增。
此方法由于方便计算机编译通用程序,目前使用广泛,已被一些多体动力学软件作为建模理论而采用。
一、笛卡儿广义坐标下的各参量笛卡儿方法是以系统中每个物体为单元,在物体上建立随体坐标系。
体的位形均相对于一个公共参考系定义,位形坐标统一为固连坐标系原点的笛卡儿坐标系与坐标系的姿态坐标。
规定全局坐标系OXYZ,其基矢量为e=[e1,e2,e3]T,过刚体任意一点O(基点)建立与刚体固连的随体坐标系oxyz,其基矢量为e′=[e′1,e′2,e′3]T。
随体坐标系能够确定刚体的运动,采用3个笛卡儿坐标以及3个方位坐标。
坐标变换矩阵A表示随体坐标相对于全局坐标系的关系。
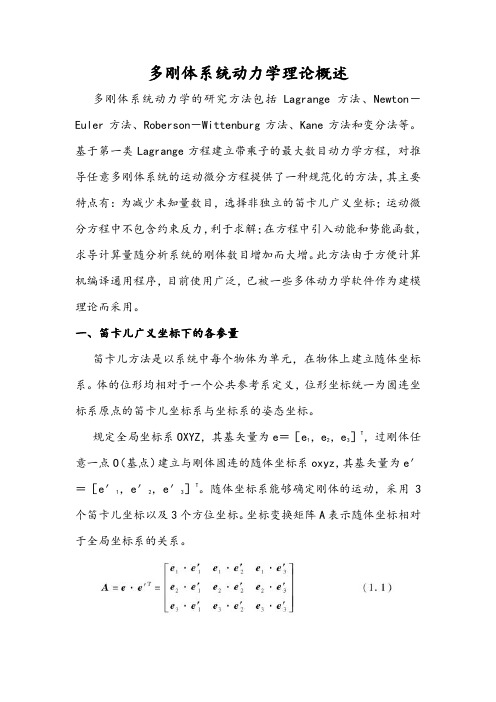
如图1.1所示,假设刚体从OXYZ变换到oxyz,随体坐标系oxyz 相对于全局坐标系OXYZ的姿态可以由三次有限转动(绕体轴3-1-3顺序)确定,即先绕OZ轴转ψ角度,再绕ON轴转θ角度,最后绕oz转φ角度。
其中,θ为章动角;ψ为进动角;φ为自转角。
图1.1 坐标系转换示意图将ψ、θ和φ这3个描述刚体姿态的坐标称为欧拉角坐标。
三次转动的坐标变换矩阵分别为从随体坐标系oxyz到全局坐标系OXYZ的坐标变换矩阵为式中,cψ=cosψ,其余类推。
根据角速度叠加原理,刚体的角速度矢量ω为将该矢量投影到全局坐标系中,写成矩阵形式,有其中求导角速度表达式可得到角加速度的表达式:如上所述,刚体的位形由随体坐标系的平动以及相对全局坐标系的转动确定。
多体动力学仿真介绍
多体动力学仿真介绍
多体动力学仿真是一种基于计算机技术的模拟方法,用于分析和预测机械系统中的运动和力学行为。
它广泛应用于机械工程、航空航天、汽车、船舶、兵器等领域,成为产品设计和性能评估的重要手段。
多体动力学仿真的基本原理是建立在牛顿第二定律和刚体动力学理论的基础上的。
它通过建立系统的数学模型,对系统中的各个刚体进行运动学和动力学分析,得出它们的运动轨迹和受力情况。
这种方法可以模拟复杂的机械系统在不同条件下的动态性能,帮助工程师更好地理解系统的运动特性和力学行为,从而进行优化设计。
多体动力学仿真的主要步骤包括建立模型、定义约束和载荷、进行仿真计算和结果分析。
在模型建立过程中,需要将实际系统抽象化为若干个刚体,并定义它们之间的连接关系和相互作用。
约束和载荷则用于描述刚体之间的相对运动和外部作用力。
通过设定适当的初始条件和边界条件,可以进行仿真计算,得出每个刚体的位置、速度、加速度等运动参数以及作用力、反作用力等力学参数。
最后,通过对结果的数值分析和后处理,可以得出系统的性能指标和优化方向。
多体动力学仿真的优点在于其能够模拟复杂系统的动态行为,可以预测系统在不同工况下的性能表现,帮助工程师提前发现和解决潜在的设计问题。
同时,这种方法还可以大大缩短产品的研发周期和降低试验成本,提高产品的可靠性和安全性。
基于阅读机械臂研究的简单总结
基于阅读机械臂研究的简单总结1 机械臂研究的目的现今社会中要求的是生产规模扩大、自动化程度提高。
而机械臂作为物料搬运的重要设备在现代化建设、生产过程中发挥着越来越重要的作用。
并且在全球化的市场中, 激烈的国际、国内市场也越来越依赖于科学技术的竞争, 这些都是促使工程机械臂设计开发技术向大型化、高可靠性、高速化、自动化和智能化方向发展的原因。
工程机械臂的机械设计者面临着新的、更严格的挑战。
其主要问题即为随着机械臂机构速度的提高, 构件柔度的加大, 精度要求的增加, 工程机械臂生产运行时产生较大的惯性力, 会导致弹性部件的变形。
当臂架机构运动进入高速区域时, 只有将运动部件作柔性体的假设, 形成所谓的柔性机构。
此时, 由于机构部件间的刚体运动与其弹性变形賴合等问题, 动力学模型将变得很复杂, 给实际问题的解决带来很大的困难。
事实上关于柔性体运动与其自身变形的复合动力学问题已经是目前的普遍性的难题。
2 机械臂系统的研究现状在通过三遍文章的阅读中, 多体系统动力学是国内外研究工程机械臂架系统最普遍的多体系统。
多体动力学是力学一个新的并迅速发展的分支, 它是相互连接的机体系统运动的非线性动力学。
首先介绍多体系统动力学的国内外研究现状。
多体系统的物理模型定义为由物体铰力元和外力等要素组成且具有一定拓扑结构的系统, 多体系统动力学是研究多体系统运动规律的科学。
多体系统动力学: 包括多刚体系统动力学和多柔体系统动力学。
多体系统动力学研究内容主要包括刚、柔体动力学建模理论及其计算方法、微分方程的数值求解、计算效率、机构综合分析、柔性效应、控制理论、优化方法、实时仿真虚拟样机技术、并行计算和可靠性等。
现在多体动力学已经形成了比较系统的分析和建模方法。
其中主要有工程中常用的以拉格朗日方程为代表的分析力学的方法、以牛顿-欧拉方程为代表的矢量学方法、图论方法、凯恩方法和变分方法等。
3 工程机械臂主要研究方向工程机械臂架系统是工程机械设计的关键, 机械臂系统的合理与否将直接关系到整个工程机械的性能以及作用。
多体系统动力学基本理论

The orientation cosine matrix is A A1 A2 A3 (i j k i3 j3 k3 )
k 2 (k3 ) k (k1 )
j3
j2
1
i
j
k i1 k2 k k1 sin j2 cos k2 sin (sin i3 cos j3 ) cos k3 i1 i2 cos i3 sin j3 k2 k3
i1 j1 k1
cos sin 0 A1 sin cos 0 0 0 1
i
i1 (i2 ) i3
j
i1 j1 k1
i1 i2 j j 1 A2 2 , k1 k 2
(i1 )
i2 j2 k2
0 0 1 A2 0 cos sin 0 sin cos
i2 j2 k2
(k 2 )
i3 j3 k3
i2 i3 cos sin 0 j2 A3 j3 , A3 sin cos 0 k 2 k3 0 0 1 i i1 i2 i3 j j j j A1 1 A1 A2 2 A1 A2 A3 3 k k1 k 2 k3
Name DADS ADAMS Formulation method Newton Euler First Lagrange Results Time history Animation Time history Animation Frequency Response Time history
多体系统动力学建模与仿真分析
多体系统动力学建模与仿真分析概述多体系统动力学建模与仿真分析是解决实际工程问题和科学研究中的重要技术手段。
本文将从理论介绍、实际应用和发展前景等几个方面,探讨多体系统动力学建模与仿真分析的相关内容。
一、多体系统动力学建模的理论基础多体系统动力学建模是研究多体系统运动规律的基础工作。
其理论基础主要包括牛顿运动定律、欧拉-拉格朗日动力学原理等。
1. 牛顿运动定律牛顿运动定律是多体系统动力学建模的基础。
根据牛顿第二定律,物体的加速度与作用在物体上的合外力成正比,与物体的质量成反比。
在多体系统中,通过对所有物体的运动状态和相互作用力进行分析,可以建立多体系统的动力学模型。
2. 欧拉-拉格朗日动力学原理欧拉-拉格朗日动力学原理是一种更为普适的多体系统动力学建模方法。
该理论通过定义系统的广义坐标和广义速度,以及系统的势能和拉格朗日函数,通过求解拉格朗日方程,得到系统的运动方程。
相比于牛顿运动定律,欧拉-拉格朗日动力学原理具有更广泛的适用性和更简洁的表达形式。
二、多体系统动力学建模的实际应用多体系统动力学建模在工程和科学领域中有着广泛的应用。
以下以机械系统和生物系统为例,简要介绍多体系统动力学建模的实际应用。
1. 机械系统在机械工程中,多体系统动力学建模是设计和优化机械系统的关键步骤。
以汽车悬挂系统为例,通过建立汽车车体、轮胎、悬挂弹簧和减震器等部件的动力学模型,可以分析车辆在不同工况下的悬挂性能,进而指导悬挂系统的设计和优化。
2. 生物系统在生物医学工程和生物力学研究中,多体系统动力学建模对于理解和模拟生物系统的运动特性具有重要意义。
例如,通过建立人体关节和肌肉的动力学模型,可以分析人体的运动机制,评估关节健康状况,提供康复治疗方案等。
三、多体系统动力学仿真分析的方法与技术多体系统动力学仿真分析是通过计算机模拟多体系统的运动过程,从而得到系统的运动学和动力学特性。
常用的方法与技术包括数值积分方法、刚体碰撞检测与处理、非线性约束求解等。
多体系统动力学分析方法研究与应用

多体系统动力学分析方法研究与应用在现代工程和科学领域中,多体系统动力学的研究具有至关重要的意义。
多体系统是由多个相互连接、相互作用的物体组成的复杂系统,其在机械工程、航空航天、汽车工业、生物力学等众多领域都有广泛的应用。
为了更好地理解和设计这些系统,对多体系统动力学的分析方法进行深入研究是必不可少的。
多体系统动力学的分析方法主要可以分为两类:基于拉格朗日方程的方法和基于牛顿欧拉方程的方法。
拉格朗日方程是一种基于能量的方法,它通过定义系统的广义坐标和广义速度,构建系统的拉格朗日函数,从而导出系统的运动方程。
这种方法的优点是可以自动处理约束条件,使得方程的推导较为简洁。
然而,对于复杂的多体系统,拉格朗日函数的构建可能会变得非常困难。
牛顿欧拉方程则是基于力和力矩的方法。
它分别对每个物体应用牛顿第二定律和欧拉方程,通过分析物体之间的相互作用力和力矩来建立系统的运动方程。
这种方法直观易懂,但在处理约束和多体之间的复杂连接关系时,可能会比较繁琐。
在实际应用中,还有一些基于上述基本方法的改进和扩展技术。
例如,凯恩方法结合了拉格朗日方程和牛顿欧拉方程的优点,通过定义广义速率和偏速度,有效地处理了复杂多体系统的动力学问题。
随着计算机技术的飞速发展,数值计算方法在多体系统动力学分析中发挥了重要作用。
常见的数值计算方法包括显式积分方法和隐式积分方法。
显式积分方法计算效率高,但稳定性较差,适用于求解短时间、小变形的问题。
隐式积分方法稳定性好,但计算成本较高,适用于求解长时间、大变形的问题。
多体系统动力学分析方法在机械工程领域有着广泛的应用。
例如,在汽车设计中,可以通过建立汽车多体动力学模型,分析悬挂系统、转向系统和传动系统的运动特性,从而优化汽车的操控性能和舒适性。
在航空航天领域,多体动力学模型可以用于模拟飞行器的飞行姿态、机翼的振动和起落架的收放等,为飞行器的设计和控制提供重要依据。
在生物力学中,多体系统动力学分析方法可以用于研究人体运动,如跑步、跳跃和行走等。