汽车起重机力矩限制器的研究
塔式起重机弓形板式力矩限制器现状及质量控制
1 张秀英 ,丁字华 . 解决城市停 车问题发 展城市停 车产业 [] . J 工程建设 与设 计 ,19 5 :6 99( ) —8 2 广州市交通规 划研 究所 ,广州 至信 交通 顾 问有 限公 司 .
广州市 区机 械式 立体 停 车库 近期 实施 规 划研 究 [ ] . R 广州市交通规划研究 所 , 04 20 3 任伯淼 ,余诚等 . 械式 立 体停 车库 [ . 洋 出 版 机 M] 海
塔 式起 重机 ( 以下 简称 塔机 )的安全 装置 种类
式力 矩 限制器 的特点 是结 构 简单 ,价 格低 ,但 功 能 不尽 完善 ,如不具 备 显示 功 能 ,不能 反 映实 际 的 吊 载 工况 。 由于我 国建 筑行 业 的特 殊性 ,低 价 格 的塔
较多 ,大型塔机 的力矩限制器在结构 、功能、综合 误差 等方 面 已达 到 相 当高 的水平 ,且 向着 智能 化发
尤 建 阳 历 桂杰
要 :针对我 国塔式重 机弓形板 式力矩 限制器现状 进行 了综合 分析 ,并通 过对 几个 案例 的分析 ,详细 介
绍 了力矩 限制器 的基本 原理及对其在质量控制方 面的合理 建议 ,对业 内同仁有一定 的指导意 义。 关键词 :塔式起 重机 ;弓形板式力矩 限制器 ;原理 ;质量控制
— —
( 或测力环) 、传动式高度限制器组合而成。弓形板
《 起重运输机械》 20 (0 06 1 )
一 7
— —
维普资讯
维普资讯
邮
者 :谢 志明 址 :广 州市广仁路 1 号广 仁大厦 1 5楼广州 至信交 通
顾 问有 限公 司 编 :50 3 10 0
收稿 日期 :20 —0 —1 05 8 2
谈塔式起重机的力矩限制器

谈塔式起重机的力矩限制器集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-谈塔式起重机的力矩限制器塔式起重机在使用中,超力矩是发生倾覆事故的主要原因之一。
因此,力矩限制器是塔吊的必备的安全装置。
弓形力矩限制器是目前塔式起重机上使用最为广泛的产品。
笔者就上回转水平变幅塔吊力矩限制器的几个问题谈谈自己的看法,供参考。
1 力矩限制器的主要技术要求综合精度不得劣于±5%,在任何情况下,其超载报警点的实测起重力矩不得大于起重机对应工况下额定起重力矩的110%;技术要求中还规定:实际起重力矩达到相应工况下额定起重力矩的90%左右时发出预警信号,达到或超过相应工况下额定起重力矩时发出超载信号,。
在在小车向前运行时,起重机力矩达到额定力矩的80%时,应自动转换为低速运行。
2 垂直度对力矩限制器的影响从以上两个标准中可知,塔身与地面的垂直度规定是从稳定性的要求出发的,如果垂直度太大,塔吊的整个重心便会移动,同时吊钩的幅度也会相应增大,其结果是减少稳定力矩而增大倾覆力矩。
如果此时调整力矩限制器,精度指标肯定超过规定标准。
如遇有大风,吊物重量超载等多种因素相遇时,对塔机稳定性的影响会更大,当超过稳定力矩极限时,就会发生塔身倾覆事故。
例如:QT60,自由高度40米,上部自重近30吨,如果按4‰计算,垂直度偏差达0.16米,增加的力矩为4.8吨米,是额定力矩的8%,很显然是比较危险的。
笔者认为在调整力矩限制器时,必须考虑到垂直度的影响,扣除因垂直度偏差而增加的力矩,这样才能保证安全。
3 变幅钢丝绳对力矩限制器的影响变幅制动可靠时,如果变幅钢丝绳松弛程度太大,当变幅小车停止时,虽然到了超载报警点,但由于惯性,小车仍会继续向前移动,不仅起重物体就位很困难,而且影响了塔吊力矩限制器的检测精度,有时会严重超载,例如:QT60塔吊,在提升最大起重量6吨时,如超报警点0.5米,则实际超载达115%,这也是很危险的。
塔式起重机起重量限制器与力矩限制器的作用
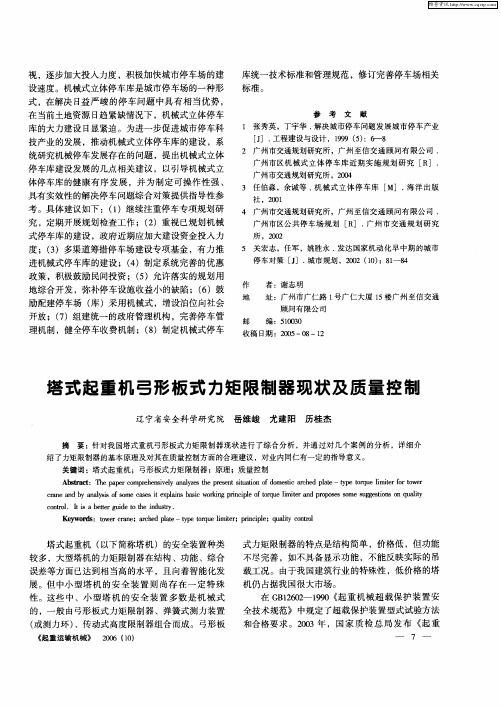
1 起重原理介绍首先介绍下两种限制器的工作原理。
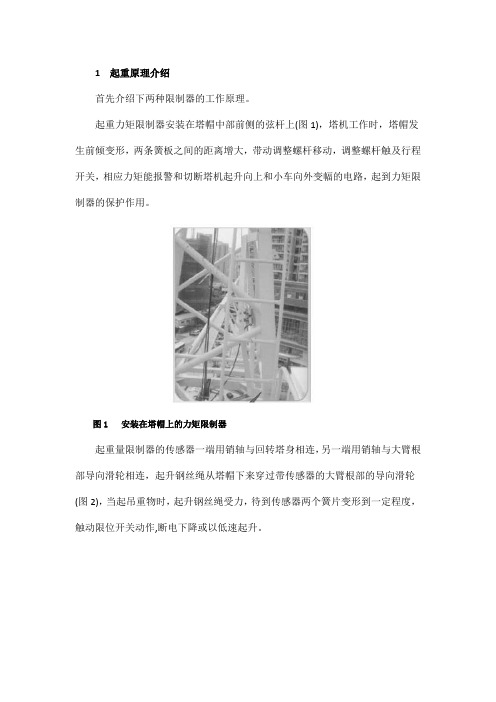
起重力矩限制器安装在塔帽中部前侧的弦杆上(图1),塔机工作时,塔帽发生前倾变形,两条簧板之间的距离增大,带动调整螺杆移动,调整螺杆触及行程开关,相应力矩能报警和切断塔机起升向上和小车向外变幅的电路,起到力矩限制器的保护作用。
图1 安装在塔帽上的力矩限制器起重量限制器的传感器一端用销轴与回转塔身相连,另一端用销轴与大臂根部导向滑轮相连,起升钢丝绳从塔帽下来穿过带传感器的大臂根部的导向滑轮(图2),当起吊重物时,起升钢丝绳受力,待到传感器两个簧片变形到一定程度,触动限位开关动作,断电下降或以低速起升。
(a)(b)(c)图2 安装在大臂根部的起重量限制器示意(a)立体示意;(b)侧面图;(c)受力分析2 限制器的区别以图3所示某厂QTZ63型塔式起重机特性曲线说明两种限制器的区别。
以4倍率50m臂说明(2倍率同理),曲线中水平段,即幅度13.72m内,最大起重量为6t;同样,2倍率时在幅度25.23m以内时最大起重量为3t,也就是每根钢丝绳承担的重量为1.5t时,起重量限制器报警,以幅度10m为例,这时起重机能起吊6t,则力矩为6x10=60(t -m)<63 (t-m),所以此时起作用的应该是起重量限制器而不是力矩限制器。
再以幅度50 m为例,此处起重量为1.3t,每根钢丝绳承担重量为1.3÷4=0.325t<1.5t,力矩为1.3×50=65( t·m)>63 (t ·m),所以此时起作用的应该是力矩限制器。
当然,因为塔机工作中受力情况复杂,起重量与力矩也不完全是以这样的比例计算,但上述内容已能充分说明起重量限制器和力矩限制器在工作中是在不同幅度中起作用的。
通过以上分析,说明两个限制器各有作用,均不能缺少、不能相互代替。
图3 某厂QTZ63型塔式起重机特性曲线。
微特电子成功研制出起重机WTL A力矩限制器

交大等国 内外 的专家评 委 ,对此款发动机给予 了很 高
的评价。 G D0 W4 2 是长城 汽车 自主研发 的一款2 升高性能柴
油 发 动 机 ,主 要 搭 载 长 城 汽 车 s v、MP u V、皮 卡 以及
微特 电子 成功研制 出
起 重机W T 力矩 限制器 LA
一
款 集 黑 匣 子 、G S 位 、 G RS 程 监 控 、地 磁 P定 P 远
A 型力矩限制器的最大 优点是数据的安全性和可靠性大
大 增 强 。 当起 重 机 的起 重 重 量超 过 额定 值 时 ,能 够根 据
起重机 的臂 长 、角度等数 据 ,最大限度地 发现潜在 危
险 ,及 时 发 出警 报 ,中断 作业 操 作 ,确 保起 重 设 备及 人
G D2柴油机还 是 目前高 性能柴油发动机 中噪声最 W4 0 小的机型 ,搭载在哈弗H5 上之后 ,驾驶室 内平均分贝
长城汽车 发动机 技术取得重 大突破
联混合动力系统 ,完成相同的工作量 ,发动机所输 出的
功 率会 大 大减 少 ,在 节 能 的 同时 更降 低 了排 放 ,整 体节
0 近 日 , 长 城 汽 车 自主 研 发 的 G D2柴 油 机 通 过 能效果 在2%以上 ,整 机回转 动作 时的噪音 指标降 低 W4 0 0 了科技成果鉴定 。来 自中国汽车技术研 究中心 、中国 5 %以上 。 汽车工程学会 、英 国布鲁奈尔大学 、清华大 学 、西安
【 l山河智能
自主研 发的混 合动 力挖掘 机 下线
山河智能 自主研发的商品化混合动力挖掘机 日前在
山河 智能 第 一产 业 园 成功 下 线 。
旋转 式干燥火箱技术及炭 黑三维分离技术 。运 用这项 成果 ,已建成4 万吨级硬质炭黑*4 U万吨级软质炭黑生产
起重机械安全装置及使用要求

起重机械安全装置及使用要求安全装置是起重机械运行不可缺少的重要组成部分,下面就给大家简单介绍一下起重机械的主要安全装置及其使用要求。
1.起重量限制器主要是用于桥架型起重机上,用来限制起重量,当载荷超过额定起重量时,使起重机停止向上起升,只能向下达到安全保护作用。
应检查超载保护装置是否灵敏可靠、符合设计要求。
2.起重力矩限制器力矩限制器是臂架类型起重机防超载发生倾翻的安全装置。
通过增幅法或增重法检查力矩限制器灵敏可靠性,并检查力矩限制器报警、切断动力源设定点的综合误差是否在规定范围内。
3.极限位置限制器检查起重设备的变幅机构,升降机构、运行机构达到设定位置距离时能否发生报警信号,自动切断向危险方向运行的动力源。
4.防风装置对于臂架根部较接点高度大于50米的起重机应检查风速仪,当达到风速设定点时或工作极限风速时能否准确报警。
露天工作在轨道上运行的起重机应检查夹轨器、铁鞋、锚固装置各零部件是否变形、缺损和它各自独立工作的可靠性。
对自动夹轨器,应检查对突发性阵风防风装置与大车运行制动器配合实现非锚定状态下的防风功能与电气联锁开关功能的可靠性。
5.防后倾翻装置对动臂变幅和臂架类型起重机应检查防后倾装置的可靠性,电气联锁的灵敏性,检查变幅位置和幅度指示器的指示精度。
6.缓冲器对不同类型起重量、运行速度不同的起重机,应检查所配置的缓冲器是否相匹配,并检查缓冲器的完好性、运行到两端能否同时触碰止挡。
7.防护装置检查起重机上各类防护罩、护栏、护板、爬梯等是否完备可靠,联轴器、链轮、链条、传动带等转动零部件有无防护罩,起重机上人行通道,爬梯及可能造成人员外露部位有无防护栏,是否符合要求。
露天作业起重机电气设备应设防雨装置。
起重力矩限制器

一 ˉ
一
将 电流表 、 电压表所对应的互感器所输出的电缆线按照仪表内相对应的贴纸 上 的功能提示接入相应的接 口。 ” 将来 自于司机室联动台上的 “ 去皮 按钮的电缆线按照仪表内相对应的贴纸 上 的功能提示接入相应的接 口。 “ ” 将主机 内的 RS-485通 信 接 口按照相对应的贴纸上的接线提示 ,接 入 PLC。
给显示器,同 时 相应的 输出 控制信号 q继虫器触点
)。
~、
~
一
将 [主 机]安 装于司机室中便于司机观察、不能妨碍司机操作的视线 、且便于 人员接线 、尽量远离干扰源的部位 ,不 得安装于有直接雨淋或其他水源射喷的地 方 。主机壳体必须可靠接地。 “ 用 RVsP4× 0.5屏 蔽双绞电缆线将来 自于 [重 量变送器接线盒]内 的 重量信 ” “ ” 号输 出 接 口接往主机的 重量信号输入 接 口,一 一对应 。 “ 用 RVsM× 0,5屏 蔽双绞电缆线将来 自于 [幅 度变送器接线盒]内 的 转角&幅 ” “ ” 度信号输出 接 口接往主机的 转角&幅 度信号输入 接 口,一 一对应 。 “ ” 将主机 内的 控制输出 接 口,按 照相对应的贴纸上 的功能提示 ,根 据实际 需要接往相应的功能控制接入点 (PLC)。 “ ” 将 主机内的 控制输入 接 口 (高 /低 速工况转换判断 ),按 照相对应的贴纸 上 的功能提示 ,根 据实际需要接往相应的功能控制接入点。 将符合 AC22OX/,+1挪 ,-10%,50/GOHz标 准的工作电源接入主机 内的 “ 电源 ” 输 入 接 口。主机的工作电源应接到起重机的控制 电源上端 ,只 要起重机在工作 状态 ,主 机必须 自动通 电,而 不受其他电器设备的控制。
;乙
塔式起重机回转机构极限力矩限制器
塔式起重机回转机构极限力矩限制器塔式起重机回转机构极限力矩限制器是一种用于保护塔式起重机回转机构的重要安全装置。
它能够监测起重机回转机构的力矩,一旦超过了设定的极限值,就会自动停止机构的运转,以避免机构的过载运行,保障起重机的安全使用。
塔式起重机回转机构是起重机的核心部件之一,主要由回转支承、回转传动装置和回转电机等组成。
它的主要功能是使起重机能够在水平方向上进行旋转,以实现对工作区域的全方位覆盖。
然而,在起重机的运行过程中,由于工作负荷的变化或操作人员的失误,可能会导致回转机构的力矩超过了其设计极限,从而引发机构的过载运行,给起重机和周围环境带来严重的安全隐患。
为了解决这个问题,塔式起重机回转机构极限力矩限制器应运而生。
它通常由力矩传感器、数据处理单元和控制系统等部分组成。
力矩传感器负责实时监测回转机构的力矩变化,将监测到的信号传输给数据处理单元。
数据处理单元对传感器的信号进行处理和分析,根据预设的极限值来判断回转机构是否超过了极限力矩。
一旦超过了极限值,数据处理单元会立即发出信号给控制系统,控制系统则会迅速停止回转机构的运转,从而避免了机构的过载运行。
塔式起重机回转机构极限力矩限制器的工作原理非常简单而有效。
它通过实时监测回转机构的力矩变化,能够及时发现机构的过载情况,并采取相应的措施进行保护。
这不仅可以避免机构的损坏,延长机构的使用寿命,还能保障起重机的安全运行,保护操作人员和周围环境的安全。
塔式起重机回转机构极限力矩限制器的应用范围非常广泛。
无论是在建筑工地、港口码头还是工业生产线上,都可以看到塔式起重机的身影。
而回转机构作为塔式起重机的核心部件之一,其安全性和可靠性直接关系到整个起重机的安全运行。
因此,在塔式起重机中安装回转机构极限力矩限制器是非常必要和重要的。
塔式起重机回转机构极限力矩限制器是一种重要的安全装置,它能够保护塔式起重机回转机构的安全运行。
通过实时监测回转机构的力矩变化,一旦超过了极限值,即刻停止机构的运转,以避免机构的过载运行。
起重机力矩限制器的调试

起重机力矩限制器的调试力矩限制器是大型起重机械必须配置的重要安全装置。
力矩限制器能够对起重载荷进行实时监测,并对不安全操作进行控制。
当起重载荷超过起重机所能承受的载荷即出现“过载荷”情况时,它会给起重机操作者发出警告,并且输出相应的信号以限制起重机的不安全动作。
正因为力矩限制器具有上述安全功能和作用,每台机器出厂之前都要对它进行参数标定和载荷检测,检测结果必须符合国家标准的有关规定,自动停止型限制器的综合误差值不应超过±5%。
现以YTQU160型履带式起重机上配置的FTQ型力矩限制器为例,简要介绍其调试过程。
1.输入基本参数履带式起重机的基本参数主要有臂架长度、吊钩质量和倍率等。
其中臂架长度决定了相应工作幅度下的载荷,而吊钩质量和倍率则直接影响了载荷的基准值和单绳的最大拉力。
在起重机的臂架、钢丝绳及吊钩完全组装完成后,起重机的基本参数就已经确定。
此时需要首先检查拉力传感器和角度传感器是否连接完好,然后给力矩限制器接通电源,在显示屏主界面按下F2即进入“工况选择”界面。
此界面包括工况号、主钩倍率、主钩质量、副钩倍率、副钩质量等栏目。
光标在“工况号”一栏闪动,通过按↑(F4)或↓(F5)选择此时的工况号,在屏幕上即显示当前的臂架长度,当与实际一致时,可按F6保存工况号。
按↑↓(F2)光标可以上、下移动,分别对“主钩倍率”和“主钩质量”进行选择并且保存参数,然后可按照相同步骤进行副钩参数的选择(按键操作参考附图)。
在起重机实际使用过程中,其臂架、吊钩等的组合模式及上述任何一项参数发生变化时,都需要重新调整参数并且保存。
2.标定角度角度的标定主要是用来标定起重机的工作幅度。
虽然角度传感器都是以水平地面为基准实时检测当前的臂架角,但是因为制造过程中的微小偏差,如果不进行标定就有可能影响检测精度,所以需要对每台机器进行单独标定。
角度的标定方法是:将整机停放在水平地面上,将臂架起升到与水平地面大约30°角的位置,力矩限制器进入到“角度标定”界面(见附图);此界面包括小角度标定、大角度标定等栏目。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
2力矩限制器的组成及工作原理
2.1系统硬件
该款汽车起重机力矩限制器主要包括以下部件:工程机械专用控制器(SYMC)、内置WINCE操作系统的液晶显示器(SYLD)、压力传感器、长度角度一体化的传感器。
其系统结构图如图l:控制器利用自身的模拟量通道(AI)采集长度、角度等传感器信号,显示器、GPRS模块与控制器之间采用CAN总线进行通讯,其余的输入、输出控制利用控制器的I/O口直接控制。
I长度、角度传感器卜一蜂鸣器l有杆腔压力传感器V-——一黄、红灯报警指示
SYMC
丁程机
l无杆腔压力传感器卜+械专用——一各种动作的电磁阀
控制器
I高度限位保护器卜善!!叫sYLD液晶显示器l三圈过放保护器F.-墨当GPRS模块
图1系统结构图
2.2力矩限制器工作原理
由于汽车起重机的机械结构复杂,当采用取上下油缸压力差的方法测量载荷时,数据处理需要结合起重机的数学模型进行。
因此,只有建立适合汽车起重机作业现场使用的简洁、准确的数学模型,才能既准确测量起重机的载荷,又能显著简化调试过程。
依据现有传感器检测到的信息,即臂长(L)、角度(口)、无杆腔压力(P-)、有杆腔压力(P2)来计算吊重(丁)和幅度(s)。
以下介绍一种数学模型。
根据力学平衡原理,如图2所示,在变幅油缸上建立平衡方程有:
F=PIAI—P2A2(1)
【F=‰l+可(2)式中A。
为无杆腔的面积、Az为有杆腔的面积、%-为大臂自重在油缸上产生的压力,,为单位吊重在油缸上产生的压力。
将(2)式变形有
r=(F一‰1)/,(3)式中‰-可以在起重机空载时,通过实验的
30方式测得。
空载时,上下腔的压力差正好等于大臂的自重在油缸上产生的力,而其随大臂的伸缩长度和变幅的角度相应变化。
F是L和a的函数,通过传感器可以实时检测到L、a、F。
以QY26起重机为例,介绍本力矩限制器计算吊重丁的原理和步骤。
按照起重性能表,分别在L(图2)等于10.3m、17.2m、24.4m、31.7m四种情况下做空载实验(即T=0)。
在某一L下空载实验时,角度口从大到小设定15个值,且在大角度处设定值的间隔较小,在每一个不同的a下,测出油缸的压力差F,得出一个(F,L,a)。
以角度a、长度L和油缸的压力差F为坐标轴,将这些实验数据进行拟合,得到如图3所示的空载曲面。
由图3可以看出,曲面比较平滑,而且所有的实验点均在曲面上,说明模拟出的空载曲面可以代表大臂自重产生的油缸压力差和大臂长度以及转角的关系曲面图,我们可以通过曲面函数来计算任意长度和任意角度下大臂自重在油缸上产生的压力‰l。
吊鲋以通过反算法算出,在10.3m、
17.2m、24.4m、31.7m下分别做吊重标定实验,在不同的角度下,吊不同已知重量(r)的砝码,测出油缸的压力,,利用曲面函数得出的‰·,根
图2起重机上车受力图
图3空载曲面图
万方数据
万方数据
汽车起重机力矩限制器的研究
作者:唐修俊, 部小平, 周斌, 罗军, 朱经伟, TANG xiu-jun, BU Xiao-ping, ZHOU Bin , LUO JUN, ZHU Jing-wei
作者单位:唐修俊,部小平,周斌,朱经伟,TANG xiu-jun,BU Xiao-ping,ZHOU Bin,ZHU Jing-wei(三一重工起重机研究院,湖南长沙,410100), 罗军,LUO JUN(三一重工智能研究本院,湖南长沙
,410100)
刊名:
建筑机械化
英文刊名:CONSTRUCTION MECHANIZATION
年,卷(期):2008,29(12)
被引用次数:1次
1.储著宇;巫世晶;张雷"黑匣子"技术在起重机力矩限制器中的应用[期刊论文]-电力机械 2005(105)
2.梁坚;朱强;王锦标ISaGRAF在SUPMAX500组态软件中的应用[期刊论文]-工业仪表与自动化装置 2002(06)
3.李淇起重机伸缩臂弹性位移的计算 1995(01)
4.梁桂航;宋正河;毛恩荣汽车起重机全力矩限制器的研制[期刊论文]-中国农业大学学报 2005(01)
1.程荣龙.乔爱民.罗少轩汽车起重机力矩限制器软硬件系统的抗干扰设计[期刊论文]-安徽科技学院学报 2010(5)本文链接:/Periodical_jzjxh200812019.aspx。