起重力矩限制器
起重机的防护装置及要求(三篇)

起重机的防护装置及要求一、超载限制器超载限制器是一种防止超载导致起重机倾覆和防止起重机的零部件因超载而损坏的安全装置,它的作用是:当载荷达到额定起重量的90%时,能发出揭示性报警信号。
设置超载限制器后,应根据其性能和精度情况进行调整或标定,当超过额定起重量时,能自动切断起升动力源,并发生禁止性报警信号。
依GB6067—85《起重机械安全规程》要求,桥式起重机额定起重量大于20t的应装,3~20t的宜装;塔吊起重能力小于25t.m的宜装。
二、起重力矩限制器起重机矩限制器,是动臂式及小车变幅式起重机很重要的一个安全装置,因为该类起重机,一定的幅度只能允许起吊一定的重量,如果超重,整个起重机就有倾覆的危险,必须设置限制器制动。
在有些塔机上,吊重和幅度的乘积一定,起重力矩限制器就可以同时控制吊重和幅度两个参数,使它们的乘积保持一定的位置,它的作用是当起重机超过额定起重力矩时,首先发出报警信号,然后切断动力源,保证起重机稳定。
按《起重机械安全规程》要求,汽车式起重机起重量小于16t的宜装,等于或大于16t的应装;塔吊起重能力等于或大于25t.m的应装。
力矩限制器反对起重机臂架纵垂直平面内的超载力矩起防护作用,不能防护斜吊、风载、地面或轨道的倾斜或陷落、行走车轮出轮等所引起的起重机倾翻事故,因此有关职责人员决不能因有了力矩限制器而忽视起重机有关安全管理、安全操作规程。
三、上升极限位置限制器这种限制器的作用是使滑轮在提升到离卷扬器极限300mm前时,能自动切断上升的电源,防止滑轮不断上升超过极限拉断钢丝绳的重大事故,在条件允许下,这一距离还可延长;对于液压起升机构宜发生禁止性报警信号,按照《起重机械安全规程》要求,动力驱动的起重机必须装设上升极限位置限位器。
四、运行极限位置限制器这种限制器的作用是根据机构所要求的进程而对电机实行控制。
按用途不同,可分为终点开关和安全开关两种。
终点开关用来限制工作机构在一定范围内运行,安装在工作机构行程的终点。
塔式起重机起重量限制器与力矩限制器的作用
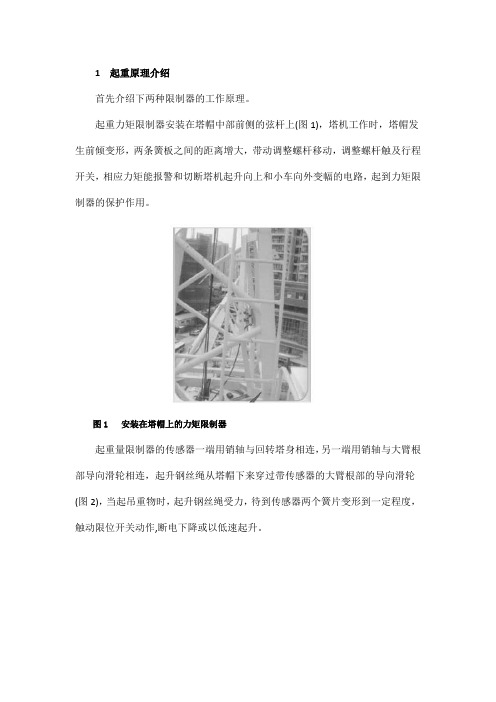
1 起重原理介绍首先介绍下两种限制器的工作原理。
起重力矩限制器安装在塔帽中部前侧的弦杆上(图1),塔机工作时,塔帽发生前倾变形,两条簧板之间的距离增大,带动调整螺杆移动,调整螺杆触及行程开关,相应力矩能报警和切断塔机起升向上和小车向外变幅的电路,起到力矩限制器的保护作用。
图1 安装在塔帽上的力矩限制器起重量限制器的传感器一端用销轴与回转塔身相连,另一端用销轴与大臂根部导向滑轮相连,起升钢丝绳从塔帽下来穿过带传感器的大臂根部的导向滑轮(图2),当起吊重物时,起升钢丝绳受力,待到传感器两个簧片变形到一定程度,触动限位开关动作,断电下降或以低速起升。
(a)(b)(c)图2 安装在大臂根部的起重量限制器示意(a)立体示意;(b)侧面图;(c)受力分析2 限制器的区别以图3所示某厂QTZ63型塔式起重机特性曲线说明两种限制器的区别。
以4倍率50m臂说明(2倍率同理),曲线中水平段,即幅度13.72m内,最大起重量为6t;同样,2倍率时在幅度25.23m以内时最大起重量为3t,也就是每根钢丝绳承担的重量为1.5t时,起重量限制器报警,以幅度10m为例,这时起重机能起吊6t,则力矩为6x10=60(t -m)<63 (t-m),所以此时起作用的应该是起重量限制器而不是力矩限制器。
再以幅度50 m为例,此处起重量为1.3t,每根钢丝绳承担重量为1.3÷4=0.325t<1.5t,力矩为1.3×50=65( t·m)>63 (t ·m),所以此时起作用的应该是力矩限制器。
当然,因为塔机工作中受力情况复杂,起重量与力矩也不完全是以这样的比例计算,但上述内容已能充分说明起重量限制器和力矩限制器在工作中是在不同幅度中起作用的。
通过以上分析,说明两个限制器各有作用,均不能缺少、不能相互代替。
图3 某厂QTZ63型塔式起重机特性曲线。
起重机械安全装置及使用要求
起重机械安全装置及使用要求安全装置是起重机械运行不可缺少的重要组成部分,下面就给大家简单介绍一下起重机械的主要安全装置及其使用要求。
1.起重量限制器主要是用于桥架型起重机上,用来限制起重量,当载荷超过额定起重量时,使起重机停止向上起升,只能向下达到安全保护作用。
应检查超载保护装置是否灵敏可靠、符合设计要求。
2.起重力矩限制器力矩限制器是臂架类型起重机防超载发生倾翻的安全装置。
通过增幅法或增重法检查力矩限制器灵敏可靠性,并检查力矩限制器报警、切断动力源设定点的综合误差是否在规定范围内。
3.极限位置限制器检查起重设备的变幅机构,升降机构、运行机构达到设定位置距离时能否发生报警信号,自动切断向危险方向运行的动力源。
4.防风装置对于臂架根部较接点高度大于50米的起重机应检查风速仪,当达到风速设定点时或工作极限风速时能否准确报警。
露天工作在轨道上运行的起重机应检查夹轨器、铁鞋、锚固装置各零部件是否变形、缺损和它各自独立工作的可靠性。
对自动夹轨器,应检查对突发性阵风防风装置与大车运行制动器配合实现非锚定状态下的防风功能与电气联锁开关功能的可靠性。
5.防后倾翻装置对动臂变幅和臂架类型起重机应检查防后倾装置的可靠性,电气联锁的灵敏性,检查变幅位置和幅度指示器的指示精度。
6.缓冲器对不同类型起重量、运行速度不同的起重机,应检查所配置的缓冲器是否相匹配,并检查缓冲器的完好性、运行到两端能否同时触碰止挡。
7.防护装置检查起重机上各类防护罩、护栏、护板、爬梯等是否完备可靠,联轴器、链轮、链条、传动带等转动零部件有无防护罩,起重机上人行通道,爬梯及可能造成人员外露部位有无防护栏,是否符合要求。
露天作业起重机电气设备应设防雨装置。
塔式起重机回转机构极限力矩限制器
塔式起重机回转机构极限力矩限制器塔式起重机回转机构极限力矩限制器是一种用于保护塔式起重机回转机构的重要安全装置。
它能够监测起重机回转机构的力矩,一旦超过了设定的极限值,就会自动停止机构的运转,以避免机构的过载运行,保障起重机的安全使用。
塔式起重机回转机构是起重机的核心部件之一,主要由回转支承、回转传动装置和回转电机等组成。
它的主要功能是使起重机能够在水平方向上进行旋转,以实现对工作区域的全方位覆盖。
然而,在起重机的运行过程中,由于工作负荷的变化或操作人员的失误,可能会导致回转机构的力矩超过了其设计极限,从而引发机构的过载运行,给起重机和周围环境带来严重的安全隐患。
为了解决这个问题,塔式起重机回转机构极限力矩限制器应运而生。
它通常由力矩传感器、数据处理单元和控制系统等部分组成。
力矩传感器负责实时监测回转机构的力矩变化,将监测到的信号传输给数据处理单元。
数据处理单元对传感器的信号进行处理和分析,根据预设的极限值来判断回转机构是否超过了极限力矩。
一旦超过了极限值,数据处理单元会立即发出信号给控制系统,控制系统则会迅速停止回转机构的运转,从而避免了机构的过载运行。
塔式起重机回转机构极限力矩限制器的工作原理非常简单而有效。
它通过实时监测回转机构的力矩变化,能够及时发现机构的过载情况,并采取相应的措施进行保护。
这不仅可以避免机构的损坏,延长机构的使用寿命,还能保障起重机的安全运行,保护操作人员和周围环境的安全。
塔式起重机回转机构极限力矩限制器的应用范围非常广泛。
无论是在建筑工地、港口码头还是工业生产线上,都可以看到塔式起重机的身影。
而回转机构作为塔式起重机的核心部件之一,其安全性和可靠性直接关系到整个起重机的安全运行。
因此,在塔式起重机中安装回转机构极限力矩限制器是非常必要和重要的。
塔式起重机回转机构极限力矩限制器是一种重要的安全装置,它能够保护塔式起重机回转机构的安全运行。
通过实时监测回转机构的力矩变化,一旦超过了极限值,即刻停止机构的运转,以避免机构的过载运行。
力矩限制器的工作原理

力矩限制器的工作原理什么是力矩限制器?力矩限制器,通俗讲,就是装在起重机上,限制起重机不要超过额定设计力矩的装置,英文名称是Load Moment Indicator(力矩显示器),简称LMI。
进入21世纪以来,国际上起重机行业已经不再用LMI来称呼起重机的安全系统,而是取代为Safe Load Indicator (安全负载指示器),简称SLI。
安全负载指示器(SLI)是一种安装在起重机上的装置,用于在载荷超过起重机的安全工作范围时警告操作员。
在某些情况下,设备会在确定为不安全的情况下物理锁定机器。
SLI系统通常由连接到起重机本身各种传感器的微处理系统组成。
SLI测量吊臂的角度和长度以及负载重量,并将其与制造商的技术规格进行比较以确定起重工作是否安全。
安全负载指示器(SLI)具有检测任何提升装置的角度,负载提升重量和半径的能力。
它控制起重设备按照制造商设计的载荷图(性能表)保持起重机的正常工作。
由于使用习惯的原因,下面统称为力矩限制器或者力限器。
起重机配备有多个传感器,用于测量各个参数,然后将这些参数经过计算进一步显示在驾驶室内供操作者参考,如下图:力矩限制器的用途几乎所有的现代起重机都有超载保护(超载限制)和力矩保护的功能,力矩限制器广泛使用于移动起重机、港口起重机、门座式起重机、塔式起重机、港口海工船舶起重机和消防和高空作业车辆。
力矩限制器的工作原理由于属于偏门和小众的市场,曾经,力矩限制器显得很神秘,被俗称为吊车电脑。
其实,力矩限制器(SLI)的核心算法非常简单,就是一个公式:∑M =0∑ M = M自重 + M 吊装- M变幅油缸 - M卷扬 = 0在这个计算模型里面,已知的变量有:支点,吊臂自重,起重机设计结构参数,其余都是未知变量。
未知变量可以通过用传感器测量与计算得出,其中:油缸的压力 = 油压 (p) x 活塞的面积 (A)通过用油压传感器测量油压,活塞面积看看图纸就知道了。
起重机力矩限制器的调试

起重机力矩限制器的调试力矩限制器是大型起重机械必须配置的重要安全装置。
力矩限制器能够对起重载荷进行实时监测,并对不安全操作进行控制。
当起重载荷超过起重机所能承受的载荷即出现“过载荷”情况时,它会给起重机操作者发出警告,并且输出相应的信号以限制起重机的不安全动作。
正因为力矩限制器具有上述安全功能和作用,每台机器出厂之前都要对它进行参数标定和载荷检测,检测结果必须符合国家标准的有关规定,自动停止型限制器的综合误差值不应超过±5%。
现以YTQU160型履带式起重机上配置的FTQ型力矩限制器为例,简要介绍其调试过程。
1.输入基本参数履带式起重机的基本参数主要有臂架长度、吊钩质量和倍率等。
其中臂架长度决定了相应工作幅度下的载荷,而吊钩质量和倍率则直接影响了载荷的基准值和单绳的最大拉力。
在起重机的臂架、钢丝绳及吊钩完全组装完成后,起重机的基本参数就已经确定。
此时需要首先检查拉力传感器和角度传感器是否连接完好,然后给力矩限制器接通电源,在显示屏主界面按下F2即进入“工况选择”界面。
此界面包括工况号、主钩倍率、主钩质量、副钩倍率、副钩质量等栏目。
光标在“工况号”一栏闪动,通过按↑(F4)或↓(F5)选择此时的工况号,在屏幕上即显示当前的臂架长度,当与实际一致时,可按F6保存工况号。
按↑↓(F2)光标可以上、下移动,分别对“主钩倍率”和“主钩质量”进行选择并且保存参数,然后可按照相同步骤进行副钩参数的选择(按键操作参考附图)。
在起重机实际使用过程中,其臂架、吊钩等的组合模式及上述任何一项参数发生变化时,都需要重新调整参数并且保存。
2.标定角度角度的标定主要是用来标定起重机的工作幅度。
虽然角度传感器都是以水平地面为基准实时检测当前的臂架角,但是因为制造过程中的微小偏差,如果不进行标定就有可能影响检测精度,所以需要对每台机器进行单独标定。
角度的标定方法是:将整机停放在水平地面上,将臂架起升到与水平地面大约30°角的位置,力矩限制器进入到“角度标定”界面(见附图);此界面包括小角度标定、大角度标定等栏目。
力矩限制器的调整

力矩限制器是塔式起重机最重要的超载保护装置。
塔式起重机作业条件恶劣,时常拆装转场、流动性大,这就要求塔式起重机力矩限制器具备坚固耐用、维护简单、利于调整的特点,因而,产品以机械型为主。
国家标准的《起重机超载保护装置安全技术规范》(GBl2602)、《塔式起重机技术条件》(GB/T9462)对起重力矩限制器的功能、技术要求、试验方法都有相应规定,也是检验的依据。
一、基本概念1.综合误差综合误差是指力矩限制器安装在起重机上,进行实际使用的情况下,动作点偏离设定点的相对误差。
综合误差=[ (动作点-设定)/设定点]×100%机械型力矩限制器的综合误差不应超过±8%,有些人把综合误差理解为动作点相对于额定起重量的偏差,这是不正确的。
在误差理论上,误差是指测量值与设定值的偏差。
就力矩限制器而言,设定值是产品的设定点,而设定点不一定都调整在100%的额定起重量上。
2.动作点在装机条件下,动作点是指由于力矩限制器的超载保护作用,塔式起重机停止向不安全方向动作时实际断电点。
3.设定点设定点是指力矩限制器标定的动作点,GBl2602规定:(1)设定点应使起重机能吊运额定载荷,不降低起重机原有的起重能力。
(2)设定点要考虑产品的综合误差,使之在任何情况下产品的动作点都不大于110%的额定起重量。
(3)设定点宜调整在100%~105%的额定起重量之间。
根据塔式起重机对力矩限制器的要求,应将设定点调整在100%~102%的额定起重量之间。
二、检验要求及方法1.选择测试点测试点的选择,主要依据塔式起重机起重特性曲线、性能和保护范围。
起重特性曲线由两部分组成,图1中AB段为强度曲线,BC段为稳定曲线。
塔式起重机同时使用力矩限制器和起重量限制器,力矩限制器对BC段曲线实施保护,起重量限制器对AB段曲线实施保护,应分别进行检验。
对力矩限制器的检验,应在BC段曲线上选择测试点。
一些力矩限制器还有限速保护功能,应根据性能制定检验方案。
WTL-A200力矩限制器使用说明书

WTL-A200型Model WTL-A200力矩限制器Torque Limiter使用说明书Manual目录1.使用安全须知Safety Tips (3)2.主要技术参数Technical Specifications (3)3.系统构成System Composition (4)4.力矩限制器的安装Torque Limiter Installation (7)5.电源线及控制线的接法Power Cord and Pilot Control Line Connection (15)6.仪表调试说明Instrument Commissioning Instructions (15)7.仪表维护及常见故障处理Instrument Maintenance and Settlement of Common Faults (22)8.产品保证及服务体系Guarantees and Services (23)阅读、使用须知在安装、使用本套力矩限制器之前,请仔细阅读本使用说明书,充分理解各章节内容的含义,正确进行相关操作。
本说明书的内容如有更改,恕不另行通知。
宜昌微特电子设备有限责任公司不对本资料进行任何形式的担保,包括但不限于商业性的或为了某种特殊目的而作的含蓄说明。
Prior to installation and operation,please read the Manual thoroughly to get sufficient understanding about the content in each section so as to ensure correct processing and operating.WTAU is not obliged to notify users of its products of any changes to the content of the Manual. It does not offer any guarantees for the materials in the Manual in any means whatsoever as well, including but not limited to commercial guarantees or implicit directions for special purposes.如在使用过程中有任何疑问可直接电话与我公司技术支持人员沟通,由于说明书可能存在的印刷或排版错误而引起的不良后果本公司不承担责任。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一 ˉ
一
将 电流表 、 电压表所对应的互感器所输出的电缆线按照仪表内相对应的贴纸 上 的功能提示接入相应的接 口。 ” 将来 自于司机室联动台上的 “ 去皮 按钮的电缆线按照仪表内相对应的贴纸 上 的功能提示接入相应的接 口。 “ ” 将主机 内的 RS-485通 信 接 口按照相对应的贴纸上的接线提示 ,接 入 PLC。
给显示器,同 时 相应的 输出 控制信号 q继虫器触点
)。
~、
~
一
将 [主 机]安 装于司机室中便于司机观察、不能妨碍司机操作的视线 、且便于 人员接线 、尽量远离干扰源的部位 ,不 得安装于有直接雨淋或其他水源射喷的地 方 。主机壳体必须可靠接地。 “ 用 RVsP4× 0.5屏 蔽双绞电缆线将来 自于 [重 量变送器接线盒]内 的 重量信 ” “ ” 号输 出 接 口接往主机的 重量信号输入 接 口,一 一对应 。 “ 用 RVsM× 0,5屏 蔽双绞电缆线将来 自于 [幅 度变送器接线盒]内 的 转角&幅 ” “ ” 度信号输出 接 口接往主机的 转角&幅 度信号输入 接 口,一 一对应 。 “ ” 将主机 内的 控制输出 接 口,按 照相对应的贴纸上 的功能提示 ,根 据实际 需要接往相应的功能控制接入点 (PLC)。 “ ” 将 主机内的 控制输入 接 口 (高 /低 速工况转换判断 ),按 照相对应的贴纸 上 的功能提示 ,根 据实际需要接往相应的功能控制接入点。 将符合 AC22OX/,+1挪 ,-10%,50/GOHz标 准的工作电源接入主机 内的 “ 电源 ” 输 入 接 口。主机的工作电源应接到起重机的控制 电源上端 ,只 要起重机在工作 状态 ,主 机必须 自动通 电,而 不受其他电器设备的控制。
;乙
O oⅠ
饣 一
」
○ ∩ ‘
pIbz
第
∷ 重
№
角
幅
5
~
亠 △
:
~—
ˉˉ
-''^ ^^~ˉ
=冖
ˉ
-ˉ
ˉ~
顺 时针 旋转增 大 ,逆 时针 旋转减 小
i乜
;
位器汜 在出厂时标定好 ,请 勿动
6
!
9、
主机 (仪 表 )的 安装与接线
[主 机 ]是 将来 自于 [接 线盒]的 集成信号进行处理后 ,将 相应的显示信号输送
“ ” 且 当前 起 重量 显示 值 瞬 问达 到或超 出当前 “ 当仪表 处于正常工 作状 态 、 额 ” ” 定起 重量 显 示值 的 135%时 ,该 组触 点 立 即转 为断开状 态 ;当 “ 起 重量 显示 “ ” 值 回落到 当 前 额 定起 重量 显 示值 的 105%以 下后 ,该 组触 点恢 复 闭合状态 。
(一 股可采 用 电焊 ),安 装 面要尽量
垂 直 于水平 面 ,传 感器轴套 上 的镙栓在 调试 完后 一 定要拧 紧 。
起重臂安装面
3、
转角传感器 (电 子罗盘 )的 安装
:
一般将其水平安装于司机室顶部 转角传感器四周 0,5米 以内应无动态的金
,
属物及强磁干扰 。
‘
4、
重量变送器接线盒的安装及接线
6、
为了便于安装、使用 ,本 装臂的各部件在工厂按技术标准用精密仪器分别调 校 ,现 场安装时一般只需要进行简单调试即可确保安全使用 ,因 此本装置的 传感器和仪表在相 同规格的情况下可互换使用 ,这 对以后的维修保养提供了 很大便利。
7、
可 自动进行起重量累加并显示累加作业量 。
三 、主 要 技 术 指标
7、
幅度 传感器 、转 角传感器与接 线盒 、主 机 相互之 问的连 线示意 图
:
|幅 度
V`'ˉ 虍ˉ'\J一
&转 角变送器 接线 到
内部迕线
`
屏 蔽层接 外 壳
(`
″
`转 “
角传感器 (电 子罗盘 ) ” 转角信号输 出 口
接 往主机
“ ” 转 角&幅 度信 号输 入 接 口
,
其 中 2、 3要 用互 为双绞 的一 组线对接 。
内的贴纸 。
输出的的信号控制线的
.
(二 )、 主 机 (仪 表 )内 控制输 出接 口的工 作 定义
:
本机 的所 有控 制输 出点均 为继 电器 干式触 点信 号 。
1、
“ ” 超 载 控制输 出点 : 当仪表 处于关机状态 时 ,该 组触 点处于 断开状态
;
、
“ ” “ ” 当仪 表处于 丌常工作状态 、且 当前 起 重量 显 示值低 于 当 前 额 定起重 量 显示 值 的 105%时 ,该 组触 点处于 闭合状 态 当仪表 处于 正常工作状态 、且 当前 起重量
且延时 2秒 钟输出控制信号
;
,
立即报警 :当 起吊重量达到额定起吊重量的 13bO/0时 ,发 出连续的报警声 ③、
一
,
立 即输出控制信号 。
:
(2)幅 度部份
① 、预报警 :当 幅度达到最大或最小额定霭迓 前 1m时 ,发 出断续的报警声 重量传感器的静强度 :传 感器静强度不低于传感器 自身额定载荷的 1.5倍 角/幅 度生蹙銎 测量范围:0~90° 工作温度 :乇 0~咱 0℃ 相对湿度 :10隅 电源 电压 :AC2⒛ V,1PH,50~60liz,也 可按用户需要配置 控制输出继电器触点容量 :AC38N,2。 弘
:
6、
量变送器接线
红
接线盒壳体 必须 接 地
一 〓
冖
蕈里传 感器
臼
慌
l#重 章变送器
两只传感器所 ψ 对丿 测 量的txl绳 应属 于 |司 一 卷 简
I
共
红
|
日 口
|
鼋量传 感器
2
臼
艹 怖
…
一
犬
红
蕈呈传 感 器
峁 重 蚩变送 器
输
l丨
变送 器估 ・ J
l凵
一 红 臼 萜 肛■
两只传感器所 对应 测 量的钏绳 应属十 |司 一 卷筒
i产 具有极其重要意义 。 械 、矿 山、铁路、码头、仓库等企业的现代化安命叫
L⒈ W型 起重力矩限制器 (以 下简称限制器 )是 由传感器 (包 括重量传感器
和幅度传感器以及相应的变送器 )、 控制器 (仪 表 )二 大部分组成 ,其 中重量传 压式 、 感器可根据实际情况选用本公司生产的拉式 、 销轴式 、 张力式等形式的传 感器 ;控 制器在设计上采用计算机技术 ,有 白动校核检查能力,具 有报警功能性 强 、结构紧凑 、操作方便 、工作稳定 、安装调试维修方便等优点,其 显示面板采 用
0,
” “ ” “ 主 机 内的 重量信号输 入 接 线端 子 ,一 一 对应 。
“ 饬 σ “
水 平面
5、
幅度变送器接线盒的安装
:
幅度变送器接线盒系提供给幅度传感器用 ,应 安装在便于人员开盖接线的 部位 (一 般可安装在司机室地糟内)。 接线盒壳体必须可靠接地 。
将 幅度传感器 的信 号 引线接 入此 盒 。 将 “ “ ” 转 角传 感器 (盒 )” 内的 转 角信 号输 出 线接 入此盒 。
1
五 、 安装 与接 线
1、
重量传感器的安装:
、
张力式等形式的传感 压式、 销轴式、 可根据实际情况选用本公司生产的拉式、 器;安 装时要牢固并确保其受力方向准确可靠 ,注 意引线的防护。
重量传 感器
2、
角/幅 度传感器的安装 ・ 矸 9o诬 数字式角/幅 度传感器 ,该 传感器为半 导体型 ,由 于在工作中不产 俪
键清晰明了并有锁定功能 ,可 有效防止无关人员误操作 。 二 、 限制 器 的主 要 特 点
1、
"D显
示 ,每 个显示窗旁都有功能 、单位标识 ,确 保观测时直观 、可靠 ,设 置
可按用户需要配箐仪表工作电源 ,如 DC24V,AC110V,AC2⒛ V,AC380V等 根据用户提供的起重机工况图表来编辑和固化
3
己在接
线 命 内部对应 并联 ,所 以只 要共用 一 组通 信线输 l||。
∴ 臼一 谪 炎一
霸量 传 感 器
4
灬 …
-ˉ ˉˉˉˉˉˉˉˉˉ丿
】
1|2|3|4|丨
I
彐 I
^
蛏⒎
(
''所 有屏蔽层
、
I12I314 接 往 主机 内 其中
2、
“ ” 重量信号输入 接 口,一 一对应 。
3要 用互为双绞的一组线对接 。
;
“ ” “ 起 重量 显示 值达 到或超 出当 肓 σ 额定
” “ ” 显 示值 的 105%、 但低 于 当 前 额定起 重量 显 示值 的 135%时
,该 组触
点延 时 2秒 后转 为断 开状 态 ;当
“ ” “ ” 起 重 量 显 示值 回落 到 当前 额 定起 重量 显
;
示值 的 105%以 下后 ,该 组触点恢 复 闭合状态
:
1ˉ
生机械磨损 ,所 以比传统的电位器重锤型有更高的测量精度及更长的使用寿命 。
应将其安装在 挺重 臂根
近 下铰 点处 :目 视起重臂增幅 方 向 ,将 其 安装 在 与右
同方 向并 与起 重臂幅度变 化平行 的平面 上 ,且 应便 于人 员 手臂外侧 (或 左 手臂 内侧 )才目 调 试 ,其 固定轴 头安装 在起 重 臂 上 时要 牢 固可靠
;
2、
3、
由于采用先进的抗干扰器件和独到的软件设计,本 装晋有极强的抗干扰能力 。
"U软
件 ,可 靠性强
;
姓 、 为了便于精确显示称重值,限 制器灭用了软件调节 记忆技术使调节便捷直观 。