EPSON机器人第三方相机校准步骤zzx
爱普生机器人原点校准方法
爱普生机器人原点校准方法Coca-cola standardization office【ZZ5AB-ZZSYT-ZZ2C-ZZ682T-ZZT18】E P S O N机械手脉冲零点校正一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。
二、应用场合:1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。
2.更换马达等其他问题。
三、机械手脉冲零点位置校正:具体调节步骤如下:1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:3.手动将机械手调整到脉冲零点位置;如下图所示:+Z方向+X方向+Y方向具体细节:1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。
)3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图:4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入:Encreset1按回车Encreset2按回车Encreset3按回车Encreset3,4按回车如图:5.保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6.保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下:Calpls0,0,0,0回车.如下图:8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入:calib1按回车1轴calib2按回车2轴calib3按回车3轴calib3,4按回车4轴(如只需校第一轴,calib1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保存完成,效正基本完成。
EPSON机器人第三方相机校准步骤zzx
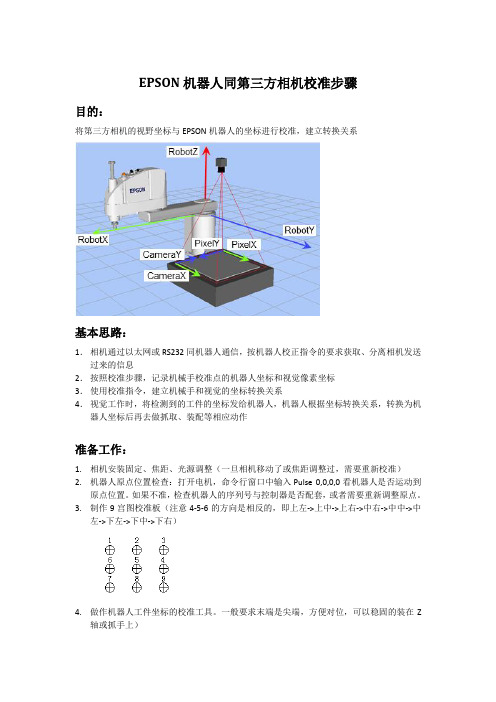
EPSON机器人同第三方相机校准步骤目的:将第三方相机的视野坐标与EPSON机器人的坐标进行校准,建立转换关系基本思路:1.相机通过以太网或RS232同机器人通信,按机器人校正指令的要求获取、分离相机发送过来的信息2.按照校准步骤,记录机械手校准点的机器人坐标和视觉像素坐标3.使用校准指令,建立机械手和视觉的坐标转换关系4.视觉工作时,将检测到的工件的坐标发给机器人,机器人根据坐标转换关系,转换为机器人坐标后再去做抓取、装配等相应动作准备工作:1.相机安装固定、焦距、光源调整(一旦相机移动了或焦距调整过,需要重新校准)2.机器人原点位置检查:打开电机,命令行窗口中输入Pulse 0,0,0,0看机器人是否运动到原点位置。
如果不准,检查机器人的序列号与控制器是否配套,或者需要重新调整原点。
3.制作9宫图校准板(注意4-5-6的方向是相反的,即上左->上中->上右->中右->中中->中左->下左->下中->下右)4.做作机器人工件坐标的校准工具。
一般要求末端是尖端,方便对位,可以稳固的装在Z轴或抓手上)相机安装方式:相机安装方式有以下几种:1 独立安装(相机坐标与机械手坐标不需要相互转换)2 固定安装(固定向上、固定向下)3 移动相机(J2轴移动,J4轴移动,J5J6轴移动)安装方式比较:使用固定安装,相机无法移动,拍摄范围小;但是视觉检测的时间一般可以用机器人工作的时间并列运行,节省节拍时间,精度相对较高。
使用移动相机,相机跟随机器人移动,可以拍摄的范围大;但是视觉进行检测前,机器人必须有一定的静止时间(~);视觉进行检测时,机器人一般需要停止不动,不能进行其他工作;整体节拍时间会更长。
因为机器人本身有定位精度,使用移动相机时,视觉检测的精度一般也比使用固定相机的低。
校准步骤:每种安装方式均需要不同的校准方式。
独立安装:使用9宫格校准板,精确的测量该板9个点之间的坐标关系固定安装(固定向下)·使用九宫格校准板·机器人末端安装校准治具·示教治具末端的工具坐标Tool n·按照九宫图的顺序,机械手末端依次对准9个位置,机器人管理器中选择对应的Tool n,并保持点位置(如保持到P1到P9)·移开机器人,视觉识别九宫图上的9个点的像素坐标,同样按照九宫图顺序,将其像素坐标XY依次保存到P11-P19中。
爱普生机器人原点校准方法

EPSON机械手脉冲零点校正一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+等。
二、应用场合:1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。
2.更换马达等其他问题。
三、机械手脉冲零点位置校正:具体调节步骤如下:1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+软件连接机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:2.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:3.手动将机械手调整到脉冲零点位置;如下图所示:具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:( U 轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm ,用钢尺量,相差在2mm 内可接受。
)+X 方向+Y 方向 +Z 方向3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;具体如图:4. 保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入:Encreset 1 按回车Encreset 2按回车Encreset 3按回车Encreset 3,4按回车如图:5. 保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6. 保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下:Calpls 0,0,0,0 回车.如下图:8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入:calib 1 按回车1轴calib 2按回车2轴calib 3按回车3轴calib 3,4按回车4轴(如只需校第一轴,calib 1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保存完成,效正基本完成。
爱普生机器人原点校准办法
爱普生机器人原点校准办法Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】EPSON机械手脉冲零点校正一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。
二、应用场合:1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。
2.更换马达等其他问题。
三、机械手脉冲零点位置校正:具体调节步骤如下:1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:3.手动将机械手调整到脉冲零点位置;如下图所示:+Z方向+X方向+Y方向具体细节:1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。
)3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图:4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入:Encreset1按回车Encreset2按回车Encreset3按回车Encreset3,4按回车如图:5.保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6.保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下:Calpls0,0,0,0回车.如下图:8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入:calib1按回车1轴calib2按回车2轴calib3按回车3轴calib3,4按回车4轴(如只需校第一轴,calib1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保存完成,效正基本完成。
EPSON爱普生机器人重置编码器和机械原点校验

EPSON爱普生机器人重置编码器和机械原点校验
第三步:将机器人移动到机械原点位置,或释放刹车后手动移动。
第四步:RC+7机器人编程软件“命令”窗口里输入calpls 0,0,0,0 (六轴输入:calpls 0,0,0,0,0,0)点回车。
再继续输入calib 1,2,3,4 (六轴输入:calib 1,2,3,4,5,6)点回车。
完成以上操作后,原点就重新校正好了。
第五步:验证原点是否校正完成,可以在命令对话框里输入pulse 0,0,0,0 (六轴输入:pulse 0,0,0,0,0,0)点回车。
如果机器人回到调整后的原点位置,说明原点校正完成。
以上操作可以使用RC+7软件自带的机器人仿真软件仿真测试。
大家感兴趣的可以去试试。
不足的地方还请大家多多指正!。
EPSON机器人第三方相机标定方法
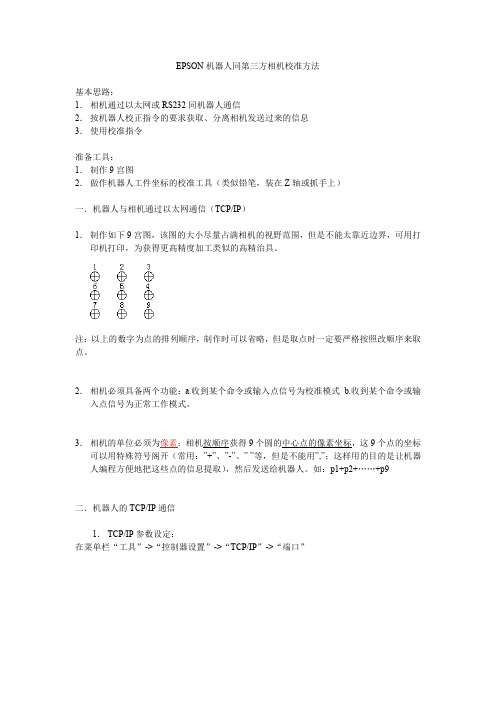
EPSON机器人同第三方相机校准方法基本思路:1.相机通过以太网或RS232同机器人通信2.按机器人校正指令的要求获取、分离相机发送过来的信息3.使用校准指令准备工具:1.制作9宫图2.做作机器人工件坐标的校准工具(类似铅笔,装在Z轴或抓手上)一.机器人与相机通过以太网通信(TCP/IP)1.制作如下9宫图,该图的大小尽量占满相机的视野范围,但是不能太靠近边界,可用打印机打印,为获得更高精度加工类似的高精治具。
注:以上的数字为点的排列顺序,制作时可以省略,但是取点时一定要严格按照改顺序来取点。
2.相机必须具备两个功能:a.收到某个命令或输入点信号为校准模式b.收到某个命令或输入点信号为正常工作模式。
3.相机的单位必须为像素:相机按顺序获得9个圆的中心点的像素坐标,这9个点的坐标可以用特殊符号阁开(常用:”+”、”-”、””等,但是不能用”,”;这样用的目的是让机器人编程方便地把这些点的信息提取),然后发送给机器人。
如:p1+p2+……+p9二.机器人的TCP/IP通信1.TCP/IP参数设定:在菜单栏“工具”->“控制器设置”->“TCP/IP”->“端口”a.“IP地址”:相机的IP地址。
b.“TCP/IP地址”:相机TCP/IP通信的端口号。
c.“终端”:信息的结束符;相机、机器人双方必须设置一致。
d.“超时”:可以忽略。
2.程序示例(测试通信,有些地方没完善)Function tpcipOpenNet#201As Client‘以客户端方式打开TCP/IP端口Print"wating......"WaitNet#201‘等待TCP/IP端口打开Print"port have open"Print#201,“CC,21”‘发送命令给相机指定工作模式,Print#201,“T1”‘命令相机拍照并且返回结果‘这里是KEYENCE的格式If ChkNet(201)>0Then‘判断是否收到数据Wait0.1Input#201,DATA$‘收到数据后存到DATA$ If Len(data$)>10Then这段命令为数据提取功能,但是不Integer ll能通用,这里只是提供参考!!!For ll=0To8s$=Mid$(data$,ll*12+1,12)Xccd(ll)=Val(s$)‘坐标分离思路:提取每个点后,用P=XY()指令转存到点文件里面去,如P21-P29Print Xccd(ll)Print DATA$ElseIf ChkNet(201)=-3Then‘后面为通信异常处理CloseNet#201OpenNet#201As ServerWaitNet#201EndIfFend三.校准,RC+5.4以后增加了支持第三方相机校准的功能,安装了对应的版本软件以后打开“SPEL+语言参考”里面有详细说明。
关于工业机器人的设置与校准方案
关于工业机器人的设置与校准方案目标本文档旨在提供一个关于工业机器人设置与校准方案的指导,以确保机器人的正常运行和准确性。
以下是我们的设定和校准步骤。
设定步骤1. 环境准备:在开始设置机器人之前,确保工作环境符合以下条件:- 清洁且无杂物的工作区域。
- 适当的照明条件以确保机器人视觉系统的准确性。
- 符合安全标准的工作环境,例如防护栏或安全警示标志。
2. 安装机器人:根据机器人制造商的指南,正确安装机器人并连接所有必要的电源和传感器。
确保机器人的稳定性和安全性。
3. 软件设置:根据机器人制造商提供的说明,安装并设置机器人的操作系统和控制软件。
确保软件与机器人的硬件兼容,并进行必要的配置。
4. 连接外部设备:根据需要,连接机器人与其他外部设备,如传感器、监控摄像头或计算机。
确保连接正确并稳定。
5. 校准视觉系统:如果机器人具有视觉系统,执行以下步骤来校准它:- 使用校准板或标准物体,对机器人进行视觉系统的校准。
- 调整相机参数,确保图像清晰且准确。
- 验证校准结果并进行必要的微调。
6. 校准运动系统:对机器人的运动系统进行校准以确保准确性和稳定性:- 使用标定工具对机器人的关节进行校准。
- 检查机器人的运动范围是否符合预期。
- 验证校准结果并进行必要的微调。
7. 测试与验证:完成设置和校准后,执行一系列测试和验证步骤以确保机器人的正常运行和准确性。
这些测试可以包括:- 运行机器人执行一系列预定的任务,并记录结果以进行分析。
- 检查机器人的运动轨迹和准确性是否与预期一致。
- 验证机器人的传感器是否正常工作并提供准确的反馈。
注意事项- 在进行机器人设置和校准时,始终遵循机器人制造商提供的说明和指南。
- 如果遇到任何问题或困难,及时咨询专业人士或制造商的技术支持团队。
- 定期检查机器人的设置和校准,以确保其持续的准确性和性能。
以上是关于工业机器人设置与校准方案的指导。
通过按照这些步骤进行设置和校准,您可以确保机器人在工作中发挥出最佳的性能和准确性。
爱普生机器人原点校准方法
爱普生机器人原点校准方法首先,我们需要准备以下工具和材料:1.爱普生机器人2.计算机B数据线4.电源适配器接下来,按照以下步骤进行原点校准:步骤1:连接机器人和计算机使用USB数据线将机器人连接到计算机上。
确保连接稳定,并将机器人连接到电源适配器上进行供电。
步骤2:打开调试工具步骤3:选择机器人模式在调试工具中选择适当的机器人模式。
爱普生机器人通常提供多种模式,如教学模式、追随模式等。
根据需要选择正确的模式。
步骤4:选择校准模式在调试工具中选择原点校准模式。
这通常可以在调试工具的菜单栏或工具栏中找到。
步骤5:开始校准在校准模式下,根据调试工具的指引进行校准。
通常,校准包括机器人的动作、灵敏度、传感器等多个方面。
根据提示逐步进行校准,确保每一步都准确无误。
步骤6:保存校准结果在校准完成后,将校准结果保存到机器人的内存中。
这通常可以通过调试工具的保存功能来实现。
步骤7:测试校准结果完成校准后,将机器人从计算机中断开连接,并进行测试。
通过测试,可以确保机器人的动作和行为与期望一致。
以上便是爱普生机器人的原点校准方法。
通过以上步骤进行校准,可以确保机器人的动作准确可靠,提升其整体性能和使用体验。
同时,我们还要提醒几个注意事项:1.在进行原点校准时,确保机器人和计算机之间的连接稳定,以免校准过程中出现问题。
2.在校准过程中,仔细阅读和遵循调试工具的指引,确保操作正确。
3.在校准完成后,及时保存校准结果,并进行测试以验证校准效果。
希望以上内容对您有所帮助!。
EPSON机器人第三方相机方法
EPSON机器人同第三方相机校准方法基本思路:1.相机通过以太网或RS232同机器人通信2.按机器人校正指令的要求获取、分离相机发送过来的信息3.使用校准指令准备工具:1.制作9宫图2.做作机器人工件坐标的校准工具(类似铅笔,装在Z轴或抓手上)一.机器人与相机通过以太网通信(TCP/IP)1.制作如下9宫图,该图的大小尽量占满相机的视野范围,但是不能太靠近边界,可用打印机打印,为获得更高精度加工类似的高精治具。
注:以上的数字为点的排列顺序,制作时可以省略,但是取点时一定要严格按照改顺序来取点。
2.相机必须具备两个功能: a.收到某个命令或输入点信号为校准模式 b.收到某个命令或输入点信号为正常工作模式。
3.相机的单位必须为像素:相机按顺序获得9个圆的中心点的像素坐标,这9个点的坐标可以用特殊符号阁开(常用:”+”、”-”、””等,但是不能用”,”;这样用的目的是让机器人编程方便地把这些点的信息提取),然后发送给机器人。
如:p1+p2+,,+p9二.机器人的TCP/IP通信1.TCP/IP参数设定:在菜单栏“工具”->“控制器设置”->“TCP/IP”->“端口”a.“IP地址”:相机的IP地址。
b.“TCP/IP地址”:相机TCP/IP通信的端口号。
c.“终端”:信息的结束符;相机、机器人双方必须设置一致。
d.“超时”:可以忽略。
2.程序示例(测试通信,有些地方没完善)Function tpcipOpenNet #201 As Client ,以客户端方式打开TCP/IP端口Print " wating......"WaitNet #201 ,等待TCP/IP端口打开Print "port have open"Print #201, “CC,21”,发送命令给相机指定工作模式,Print #201, “T1”,命令相机拍照并且返回结果,这里是KEYENCE的格式If ChkNet(201) > 0 Then ,判断是否收到数据Wait 0.1Input #201, DA TA$ ,收到数据后存到DATA$ If Len(data$) > 10 Then 这段命令为数据提取功能,但是不Integer ll 能通用,这里只是提供参考!!!For ll = 0 To 8s$ = Mid$(data$, ll * 12 + 1, 12)Xccd(ll) = V al(s$) ,坐标分离思路:提取每个点后,用P=XY()指令转存到点文件里面去,如P21-P29Print Xccd(ll)Print DA TA$ElseIf ChkNet(201) = -3 Then ,后面为通信异常处理CloseNet #201OpenNet #201 As ServerWaitNet #201EndIfFend三.校准,RC+5.4以后增加了支持第三方相机校准的功能,安装了对应的版本软件以后打开“SPEL+语言参考”里面有详细说明。
机器人原点校准命令及方法
EPSON机器人原点校准命令及用法一.命令1.PULSE :根据给出每个关节的脉冲数移动或返回当前位置各关节的脉冲值例:移动到机器人原点2.HOFS:设置或返回编码器Z相到机械原点的脉冲数3.CALPLS :校准位置校准位置((或原点或原点))的脉冲数设置或显示4.ENCRESET :编码器复位5.CALIB :将Calpls 的脉冲值写入系统6. BRAKE :刹车刹车单元单元单元控制控制控制命令命令命令;;控制控制电磁电磁电磁刹车刹车刹车单元单元单元抱闸抱闸抱闸或或松开二. 机器人与原点校准方法1.校准方法校准方法::a. 移动手臂到机械原点或维修前已经确定的位置;b. EncReset (复位编码器每个轴),在命令窗口输入:Encreset 1- Encreset 6;c. 重启控制器,“菜单栏”->工具->控制器->重置控制器;d. 设定原点脉冲,Calpls 0, 0, 0, 0 (在原点位置);或Calpls Ppls(P1,1),Ppls(P1,2),Ppls(P1,3),Ppls(P1,4) (引用原点变更前已经示教好的P1点);e. Calib (校准每个轴):Calib 1Calib 2Calib 3,4Calib 42.轴机器人第二关节轴机器人第二关节精确校准精确校准精确校准((左右手左右手姿姿势校准势校准)): a. 验证经过校准机器人J2关节的中心是否重合,方法如下:①准备下图治具,安装在滚珠丝杆的末端;该治具的加工精度应足够高,尽量保证安装后滚珠丝杆、治具顶尖同心;②在工作台上固定一个“十”字标记(可以用纸打印),在右手姿势移动机器人,让装在Z 轴上治具的顶尖对准十字的中心,如下图:Z 轴安装了治具及和“十”字标记对准③把当前点示教为P1;④在命令窗口里输入 JUMP P0/L :Z(0) 命令,让机器人切换到左手姿势,把当前点示教为P2;⑤点动Z 轴接近工作台上面的“十”字标记,核对这两个位置是否重合;如果重合校准到此结束,否则继续进行以下操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EPSON机器人同第三方相机校准步骤目的:将第三方相机的视野坐标与EPSON机器人的坐标进行校准,建立转换关系基本思路:1.相机通过以太网或RS232同机器人通信,按机器人校正指令的要求获取、分离相机发送过来的信息2.按照校准步骤,记录机械手校准点的机器人坐标和视觉像素坐标3.使用校准指令,建立机械手和视觉的坐标转换关系4.视觉工作时,将检测到的工件的坐标发给机器人,机器人根据坐标转换关系,转换为机器人坐标后再去做抓取、装配等相应动作准备工作:1.相机安装固定、焦距、光源调整(一旦相机移动了或焦距调整过,需要重新校准)2.机器人原点位置检查:打开电机,命令行窗口中输入Pulse 0,0,0,0看机器人是否运动到原点位置。
如果不准,检查机器人的序列号与控制器是否配套,或者需要重新调整原点。
3.制作9宫图校准板(注意4-5-6的方向是相反的,即上左->上中->上右->中右->中中->中左->下左->下中->下右)4.做作机器人工件坐标的校准工具。
一般要求末端是尖端,方便对位,可以稳固的装在Z轴或抓手上)相机安装方式:相机安装方式有以下几种:1 独立安装(相机坐标与机械手坐标不需要相互转换)2 固定安装(固定向上、固定向下)3 移动相机(J2轴移动,J4轴移动,J5J6轴移动)安装方式比较:使用固定安装,相机无法移动,拍摄围小;但是视觉检测的时间一般可以用机器人工作的时间并列运行,节省节拍时间,精度相对较高。
使用移动相机,相机跟随机器人移动,可以拍摄的围大;但是视觉进行检测前,机器人必须有一定的静止时间(0.2s~0.5s);视觉进行检测时,机器人一般需要停止不动,不能进行其他工作;整体节拍时间会更长。
因为机器人本身有定位精度,使用移动相机时,视觉检测的精度一般也比使用固定相机的低。
校准步骤:每种安装方式均需要不同的校准方式。
独立安装:使用9宫格校准板,精确的测量该板9个点之间的坐标关系固定安装(固定向下)·使用九宫格校准板·机器人末端安装校准治具·示教治具末端的工具坐标Tool n·按照九宫图的顺序,机械手末端依次对准9个位置,机器人管理器中选择对应的Tool n,并保持点位置(如保持到P1到P9)·移开机器人,视觉识别九宫图上的9个点的像素坐标,同样按照九宫图顺序,将其像素坐标XY依次保存到P11-P19中。
固定安装(固定向上)机械手可以在相机中移动,不需要九宫图校准板·在机械手治具上找一个视觉容易识别的、唯一的特征点,建议圆形、圆孔。
或者机械手抓取需要识别的工件,在工件上找特征。
·使用机器人管理器的工具向导,根据提示,在相机视野中,示教工具坐标Tool n(将特征点移动到相机中心附近,先用视觉的功能抓取该特征点的中心并记录下来,该点示教为工具坐标的第一个点;旋转U轴,再平移XY,将该特征移回到视觉上一次抓取的位置,示教为工具坐标的第二点)·按照九宫图的顺序,依次将特征点移动到相机视野中的上左->上中->上右->中右->中中->中左->下左->下中->下右等位置,共移动9次,并在Tool n下保存机器人位置到P1-P9。
同时视觉依次抓取9个特征点的中心像素值,记录为P11-P19移动相机校准:移动相机需要按机器人末端安装校准治具,并在相机工作视野平面上,找一个视觉容易识别且唯一的特征点。
·示教校准治具末端的工具坐标Tool n·将治具末端对准特征点,在Tool n下保存该位置为P0·机器人管理器中,将Tool切换到Tool 0·将相机移动到特征点上方,让特征点按照九宫图顺序,即视野的上左->上中->上右->中右->中中->中左->下左->下中->下右位置。
Tool 0下记录下每个位置的机器人坐标为P1-P9;·同时每走一个位置时,视觉抓取该特征点的中心像素值,依次记录到P11-P19校准程序:校准指令独立视觉:VxCalib 0, VISION_CAMORIENT_STANDALONE, P(11:19), P(1:9)固定向下:VxCalib 0, VISION_CAMORIENT_FIXEDDOWN, P(11:19), P(1:9)固定向上:VxCalib 0, VISION_CAMORIENT_FIXEDUP, P(11:19), P(1:9)第二轴移动相机:VxCalib 0, VISION_CAMORIENT_MOBILEJ2, P(11:19), P(1:9), P0第四轴移动相机:VxCalib 0, VISION_CAMORIENT_MOBILEJ4, P(11:19), P(1:9), P0校准结果使用VxcalInfo指令来查询校准结果。
If VxCalInfo(0, 1) = True ThenPrint "相机校准成功,结果如下:"Print " X方向の平均偏差[mm]:", VxCalInfo(0, 2)Print " X方向の最大偏差[mm]:", VxCalInfo(0, 3)Print " X方向一个像素/毫米( mm ):", VxCalInfo(0, 4)Print " X方向的倾斜角度( deg ):", VxCalInfo(0, 5)Print " Y方向の平均偏差[mm]:", VxCalInfo(0, 6)Print " Y方向の最大偏差[mm]:", VxCalInfo(0, 7)Print " Y方向一个像素/毫米( mm ):", VxCalInfo(0, 8)Print " Y方向的倾斜角度( deg ):", VxCalInfo(0, 9)ElsePrint "相机校准失败,请重新示教点校准相机!"EndIf校准保存与读取可以将校准结果保存在后缀名为CAA的文件中,方便下次运行视觉程序时可以直接读取而不用再次运行校准。
保存时,会同时保存校准编号0-15至文件中。
因此,如果需要把多个相机的校准都保存到同一个文件,每次运行校准保存前先用Vxcalload “Calibration.caa”加载文件。
VxCalLoad "CCD_Calib.caa" '加载校准文件VxCalSave "CCD_Calib.caa" '保存校准文件视觉数据转换固定相机:vx = 100 '拍摄工件的视觉坐标xvy = 100 '拍摄工件的视觉坐标yvu = 90 '拍摄工件的视觉坐标角度uP50 = XY(vx, vy, 0, vu)Print "转换前的视觉坐标为:", P50P60 = VxTrans(0, P50)Print "转换后的机器人坐标为:", P60Tool 1Jump P60移动相机:移动相机拍照时,需要把机械手的拍照位置(Tool 0)也计算进去。
同时相机的角度也是随着机械手移动而改变的,需要计算相机的当前角度。
'第二轴移动相机Tool 0Jump P40 '移动到拍照位置uCamera = PAgl(P40, 1) + PAgl(P40, 2) '相机角度=第一关节角度+第二关节角度vx = 100 '拍摄工件的视觉坐标xvy = 100 '拍摄工件的视觉坐标yvu = 90 '拍摄工件的视觉坐标角度uP50 = XY(vx, vy, 0, vu + uCamera)Print "转换前的视觉坐标为:", P50P60 = VxTrans(0, P50, P40)Print "转换后的机器人坐标为:", P60Tool 1Jump P60'第四轴移动相机Tool 0Jump P40 '移动到拍照位置uCamera = CU(Here) '相机角度=U轴角度vx = 100 '拍摄工件的视觉坐标xvy = 100 '拍摄工件的视觉坐标yvu = 90 '拍摄工件的视觉坐标角度uP50 = XY(vx, vy, 0, vu + uCamera)Print "转换前的视觉坐标为:", P50P60 = VxTrans(0, P50, P40)Print "转换后的机器人坐标为:", P60Tool 1Jump P60注意:有些视觉系统中角度的方向与机器人相反,因此在取视觉发过来的u角度数值时,需要取相反数值vu = -vu。
视觉的角度正方向可以通过测试得知校准验证校准完成后,可以在相机视野中找任意一点,将其视觉坐标进行转换,再切换工具坐标,让机械手的工具末端走到对应的位置,看位置是否能够重叠。
如果重叠,说明视觉校准是准确的。
参考程序:(RC+7.0版本)。